一种高精度测功机的制作方法
1.本技术涉及功率测定设备技术领域,尤其是涉及一种高精度测功机。
背景技术:
2.目前测功机也称测功器,主要用于测试动力机械功率,也可作为齿轮箱、减速机、变速箱的加载设备,能够对电机从空载到堵转的全部性能曲线。在对电机进行空载、负载点的性能进行测试的同时,检测输入电压、电流、功率等状况。
3.常规的测功机(由负载机通过联轴器和旋转式转矩转速传感器连接,旋转式转矩转速传感器通过连轴器与电机轴连接组成)通过传感器感知电机的扭矩,其精度取决于传感器本身的测量精度以及传感器前后连轴器的安装精度。联轴器在转动的过程中会有风阻,并且旋转式转矩转速传感器连接连接的轴承有震动和噪音,这些产生的数据变化虽然较少,但还是会对测试的精度产生影响。
4.发明人认为:常规的测功机所采用的旋转式转矩转速传感器需要对传感器本身的测量精度以及前后联轴器的安装精度要求较高,且容易测得的数据精准度较低。
技术实现要素:
5.为了提高测功机的测量精度,本技术的目的是提供一种高精度测功机。
6.本技术提供的一种高精度测功机采用如下的技术方案:
7.一种高精度测功机,包括支撑架、设置于所述支撑架上的负载机,所述负载机包括定子、转子和机壳,所述机壳的两侧可拆卸固定有具有形变能力的扭力盘,所述机壳上设置有测试杆,所述支撑架上设有激光距离传感器,所述激光距离传感器用于检测测试杆移动的距离。
8.通过采用上述技术方案,当使用测功机测试电机的扭矩时,待测电机的电机轴通过联轴器和负载机的电机轴相连接,然后待测电机转动并带动负载机的电机轴转动。由于定子通过扭力盘固定于支撑架上,因此机壳会发生转动的趋势,故扭力盘在机壳的作用下会发生细微的转动,此时机壳也会发生细微转动,进而带动测试杆转动,使得测试杆的位置发生变化。机壳的转动趋势通过测试杆直接放大,以便于激光距离传感器检测测试杆的位移量即可换算出转矩,从而提高测功机的测量精度。
9.可选的,所述激光距离传感器包括脉冲式激光测距仪,所述脉冲式激光测距仪通过测量时间测得测试杆移动的距离。
10.通过采用上述技术方案,当检测测试杆的位移量时,脉冲式激光测距仪发出的激光发出到测试杆初始位置后反射回,然后对测试杆最终位置进行发射激光并反射回,以通过两次激光反射回来的时间,测得测试杆初始位置和最终位置的距离,从而换算出精度较高的转矩。
11.可选的,所述激光距离传感器包括相位式激光测距仪,所述相位式激光测距仪通过换算相位延迟得到测试杆移动的距离。
12.通过采用上述技术方案,当检测测试杆的位移量时,相位式激光测距仪用无线电波段的频率,对激光束进行幅度调制并制定调制光往返测线一次所产生的相位延迟。即激光束对测试杆的初始位置和最终位置进行往返产生的相位延迟,然后根据调制光的波长,换算测得相位延迟所代表的距离,从而得出测试杆的位移量,并换算出转矩。
13.可选的,所述激光距离传感器包括三角式激光测距仪,所述三角式激光测距仪通过反射接收后的光点位置得到测试杆移动的距离。
14.通过采用上述技术方案,当检测测试杆的位移量时,三角式激光测距仪的半导体激光器发出的激光先后经过测试杆移动前的初始位置、移动后的最终位置。两次位置反射的激光被三角式激光测距仪内的镜片收集,然后投射到ccd阵列上,最后通过三角式激光测距仪内部的信号处理器通过三角函数计算阵列上的光点位置得到初始位置和最终位置的距离,从而便于三角式激光测距仪换算得出高精度的转矩。
15.可选的,所述三角式激光测距仪的发射端倾斜朝向所述测试杆的底壁。
16.通过采用上述技术方案,测试杆底壁的移动路径和三角式激光测距仪发出的激光相平行,使得三角式激光测距仪发出的激光始终位于测试杆的底壁,从而便于测试杆的初始位置和最终位置将激光反射至三角式激光测距仪内的镜片上。
17.可选的,所述测试杆于所述机壳上偏心设置。
18.通过采用上述技术方案,使得测试杆的移动路径为倾斜的弧线,进而使得测试杆的初始位置和最终位置的连接线为一条倾斜的直线,以便于和三角式激光测距仪发出的激光相平行。
19.可选的,所述激光距离传感器包括激光回波式测距仪,所述激光回波式测距仪用于将上千次的测量结果进行平均输出。
20.通过采用上述技术方案,当检测测试杆的位移量时,在测试杆的移动过程中,激光回波式测距仪通过激光发射器每秒发射一百万个脉冲到测试杆并返回至接收器,处理器计算激光脉冲遇到测试杆并返回接收器所需时间,以计算出上千个距离值,然后将上千个距离值取得平均值后换算得出转矩,从而进一步提高转矩测量的精度。
21.可选的,所述激光距离传感器转动设置于所述支撑架上,所述激光距离传感器上螺纹连接有抵紧于支撑架侧壁的固定销。
22.通过采用上述技术方案,当需要调整激光距离传感器朝向测试杆的角度时,拧松固定销,带动激光距离传感器转动,以调整激光距离传感器的朝向,然后拧紧固定销,完成对激光距离传感器朝向的调节。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.通过设置激光距离传感器,利用激光发射测得测试杆移动的位移量换算出转矩,从而提高测功机的测量精度;
25.2.通过使用脉冲式激光测距仪,以测试激光从测试杆初始位置和最终位置的两次反射时间,测得测试杆初始位置和最终位置的距离,从而换算出精度较高的转矩;
26.3.通过使用相位式激光测距仪,利用激光束对测试杆的初始位置和最终位置进行往返产生的相位延迟,换算测得相位延迟所代表的距离,从而得出测试杆的位移量后换算出转矩;
27.4.通过设置三角式激光测距仪,利用激光在测试杆底壁的初始位置和最终位置反
射至镜片,经过镜片投射到ccd阵列,信号处理器通过三角函数计算阵列上的管段位置得到初始位置和最终位置的距离,从而便于三角式激光测距仪换算得出高精度的转矩;
28.5.通过设置激光回波式测距仪,测的上千个距离值后取得平均值算得出转矩,从而进一步提高转矩测量的精度。
附图说明
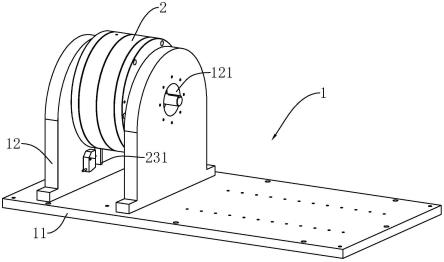
29.图1是本技术实施例1的整体结构示意图。
30.图2是本技术实施例1用于展示定子的结构示意图。
31.图3是本技术实施例1用于展示激光距离传感器的爆炸示意图。
32.图4是本技术实施例3的结构示意图。
33.附图标记说明:1、支撑架;11、底板;12、支撑板;121、转动槽;122、激光距离传感器;123、固定销;2、负载机;21、定子;22、转子;23、机壳;231、测试杆;24、扭力盘。
具体实施方式
34.以下结合附图1-4对本技术作进一步详细说明。
35.本技术实施例公开一种高精度测功机。
36.实施例1:
37.参照图1,高精度测功机包括支撑架1、可拆卸安装于支撑架1上的负载机2,支撑架1包括底板11和并排固定于底板11上的两个支撑板12,两个支撑板12间隔设置,且负载机2安装于支撑板12之间。
38.参照图1和图2,负载机2包括定子21、转子22和机壳23,机壳23的两端通过螺栓连接有扭力盘24,扭力盘24具有形变能力,扭力盘24再通过螺栓连接固定于机壳23两侧的支撑板12上。
39.参照图1和图2,支撑板12上开设有供转子22两端伸出并转动的转动槽121,转动槽121同时也供待测电机的联轴器转动。底板11沿转子22的轴线方向延伸以便于待测电机进行安装。通过减少联轴器等机械结构,以减少和传感器连接的轴承的震动和噪音,并减少转子22和电机轴连接受到的风阻,进而提高测功机的测量精度。
40.参照图3,机壳23朝向支撑板12的端面上竖直固定连接有测试杆231,测试杆231延伸出机壳23的周向侧壁并位于机壳23的下方。支撑板12朝向机壳23的侧壁上转动连接有激光距离传感器122,激光距离传感器122位于机壳23的下方,激光距离传感器122的发射端朝向测试杆231的侧壁,以使激光距离传感器122发射的激光垂直射向测试杆231的侧壁后返回。激光距离传感器122由于是通过激光进行检测,激光检测受到的干扰也较少,进一步提高测量测试杆231位移量的精确度。
41.参照图3,激光距离传感器122上贯穿并螺纹连接有固定销123,固定销123沿激光距离传感器122的转动轴线方向螺纹连接于激光距离传感器122内,固定销123穿过激光距离传感器122的一端抵紧于支撑板12的侧壁,以将调整好角度的激光距离传感器122固定于支撑板12上。
42.参照图2和图3,激光距离传感器122用于检测测试杆231的移动距离,即测试电机的扭矩时,待测电机的电机轴通过联轴器和负载机2的电机轴相连接,然后待测电机转动并
带动负载机2的电机轴转动,负载机2的电机轴在转动的过程中,负载机2的电磁转矩同时施加于定子21和转子22。定子21所受到的转矩与转子22所受到的转矩大小相等,方向相反,所以电机轴上的转矩可以由定子21上量测。由于定子21通过扭力盘24固定于支撑架1上,因此机壳23会发生转动的趋势,故扭力盘24在机壳23的作用下会发生细微的转动,此时机壳23也会发生细微转动,进而带动测试杆231转动,使得测试杆231的位置发生变化。机壳23的转动趋势通过测试杆231直接放大,以便于激光距离传感器122检测测试杆231的位移量即可换算出转矩。
43.参照图3,激光距离传感器122包括脉冲式激光测距仪,脉冲式激光测距仪针对激光的飞行时间差测得测试杆231移动的距离。激光脉冲持续时间极短,能量在时间上相对集中,瞬时功率很大的特点进行测距。即发出两道光束依次通过测试杆231的初始位置和最终位置计算激光发出到反射回的时间。通过公式,d=ct/2(d——测试杆231初始位置和最终位置两点间距离;c——光在大气中传播的速度;t——光往返测试杆231初始位置和最终位置一次所需的时间),计算出时间差以及光在空气中传播的速度得出测试杆231的移动距离。
44.本技术实施例一种高精度测功机的实施原理为:当对测试杆231的位移距离时,将待测电机通过联轴器连接于转子22上,然后启动待测电机,待测电机带动转子22于定子21内转动,此时定子21和转子22受到的转矩大小相等、方向相反,即在扭力盘24的形变下,测试杆231随机壳23转动,以使测试杆231的位置发生变化。机壳23的转动趋势通过测试杆231直接放大,以便于激光距离传感器122检测测试杆231的位移量即可换算出转矩,从而提高测功机的测量精度。
45.实施例2:
46.激光距离传感器122还包括相位式激光测距仪,即激光束对测试杆231的初始位置和最终位置进行往返产生的相位延迟,然后根据调制光的波长,换算测得相位延迟所代表的距离,从而得出测试杆231的位移量。即用间接方法测定出光经往返测线所需的时间。若调制光角频率为ω,在待测量距离d上往返一次产生的相位延迟为φ,则对应时间t可表示为:t=φ/ω将此关系代入d=ct/2中,距离d可表示为d=1/2ct=1/2c
•
φ/ω=c/(4πf)(nπ+δφ)=c/4f(n+δn)=u(n+)。其中(φ——信号往返测线一次产生的总的相位延迟;ω——调制信号的角频率,ω=2πf;u——单位长度,数值等于1/4调制波长n——测线所包含调制半波长个数;δφ——信号往返测线一次产生相位延迟不足π部分;δn——测线所包含调制波不足半波长的小数部分)。
47.δn=φ/ω在给定调制和标准大气条件下,频率c/(4πf)是一个常数,此时距离的测量变成了测线所包含半波长个数的测量和不足半波长的小数部分的测量即测n或φ,从而得出测试杆231的移动距离。
48.实施例3:
49.参照图4,激光距离传感器122还包括三角式激光测距仪,三角式激光测距仪通过反射接收后的光点位置得到测试杆231移动的距离。测试杆231此时偏心固定于机壳23的端面上,三角式激光测距仪的激光发射端倾斜朝向测试杆231的底壁,以使测试杆231底壁移动的初始位置和最终位置连接成直线,并使得这条直线和三角式激光测距仪反射的激光相平行,以使测试杆231移动的过程中,激光始终能够发射于测试杆231的底壁。
50.三角式激光测距仪包括发射激光的半导体激光器、将半导体激光器发射的激光水
平导出的镜片一、接收从测试杆231反射的激光的镜片二、接收镜片二上反射激光的线性ccd阵列、连接线性ccd阵列和半导体激光器的处理器。
51.半导体激光器发射的激光被镜片一聚焦到位于初始位置和最终位置的测试杆231上。反射光被镜片二收集,投射到线性ccd阵列上;信号处理器5通过三角函数计算线性ccd阵列上的光点位置得到测试杆231的初始位置和最终位置的距离,从而得出测试杆231移动的距离。
52.实施例4:
53.激光距离传感器122还包括激光回波式测距仪,能够将上千次的测量结果进行平均输出得出平均值。激光回波式测距仪内部由处理器单元、回波处理单元、激光发射器、激光接受器等部分组成。在测试杆231从初始位置移动至最终位置的过程中,激光位移传感器通过激光发射器每秒发射一百万个脉冲到测试杆231并返回至接收器,处理器计算激光脉冲遇到测试杆231并返回接收器所需时间,以此计算出距离值,该输出值是将上千次的测量结果进行的平均值,最后根据平均这进行换算得出转矩,从而进一步提高转矩测量的精度。
54.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1