一种船舶网络控制系统的制作方法
[0001]
本发明实施例涉及船舶配电网络技术领域,尤其涉及一种船舶网络控制系 统。
背景技术:
[0002]
船舶电能管理系统是对船舶电能进行管理以及对船舶的各种负载进行协调 控制,保障船舶稳定运行的系统。
[0003]
不同的船舶配置有不同的配电通信网络,船舶电能管理系统运行时必须基 于船舶的配电通信网络,配电通信网络出现故障将导致船舶电能管理系统无法 继续正常运行,因此,如何应对不同类型的配电通信网络故障,以保证船舶电 能管理系统不受配电通信网络故障影响继续正常运行是当前亟待解决的问题。
技术实现要素:
[0004]
本发明实施例提供一种船舶网络控制系统,以应对不同类型的配电通信网 络故障,保证船舶电能管理系统不受配电通信网络故障影响正常运行。
[0005]
本发明实施例提供了一种船舶网络控制系统,该船舶网络控制系统包括:
[0006]
n个子控制系统,各个子控制系统分别对应船舶的不同类型的控制系统;
[0007]
主控制系统,主控制系统与n个子控制系统构成网络拓扑结构,并与各个 子控制系统进行通信;
[0008]
主控制系统根据通过通信所识别到的各个子控制系统的参数信息对网络拓 扑结构中的网络段路的网络状态进行实时检测,以在网络段路的网络状态发生 异常时,与m个子控制系统构成重构网络拓扑结构;其中,n和m均为正整数, m≤n。
[0009]
可选地,主控制系统包括第一主控制器;每个子控制系统包括一个子控制 器;第一主控制器与n个子控制器构成网络拓扑结构,并与各个子控制器进行 通信。
[0010]
可选地,第一主控制器的第一网口与第1个子控制器的第一网口连接;第 n-1个子控制器的第二网口与第n个子控制器的第一网口连接;第n个子控制 器的第二网口与第一主控制器的第二网口连接;第一主控制器的第一网口与第 二网口互为冗余网口;子控制器的第一网口与第二网口互为冗余网口;第一主 控制器根据通过通信所识别到的各个子控制器的参数信息对n个子控制器中 的,各第一网口与第二网口之间的网络段路的网络状态进行实时检测,以在任 意第一网口与第二网口之间的网络段路的网络状态发生异常时,与m个子控制 器构成重构网络拓扑结构。
[0011]
可选地,在第u个子控制器的第二网口与第v个子控制器的第一网口之间 的网络段路的网络状态发生异常时,重构网络拓扑结构包括:第一主控制器的 第一网口与第1个子控制器的第一网口连接;第u-1个子控制器的第二网口与 第u个子控制器的第一网口连接;第v个子控制器的第二网口与第v+1个子控 制器的第一网口连接;第n个子控制器的第二网口与第一主控制器的第二网口 连接;其中,u和v均为正整数,u<v<n,第u个子控制器与第v个子控制器 相邻。
[0012]
可选地,第一主控制器的第一网口和/或第二网口连接于第一交换机的一 侧;各个子控制器的第一网口和/或第二网口分别连接于第一交换机的另一侧; 第一主控制器的第一网口与第二网口互为冗余网口;子控制器的第一网口与第 二网口互为冗余网口;第一主控制器根据通过通信所识别到的各个子控制器的 参数信息对n个子控制器中的,各第一网口和/或第二网口与第一交换机之间的 网络段路的网络状态进行实时检测,以在任意第一网口和/或第二网口与第一交 换机之间的网络段路的网络状态发生异常时,与m个子控制器构成重构网络拓 扑结构。
[0013]
可选地,在第u个子控制器的第一网口和第二网口与第一交换机之间的网 络段路的网络状态均发生异常时,重构网络拓扑结构包括:第一主控制器的第 一网口和/或第二网口连接于第一交换机的一侧;n个子控制器中除去第u个子 控制器后的m个子控制器的第一网口和/或第二网口分别连接于第一交换机的 另一侧;其中,u为正整数,u≤n。
[0014]
可选地,第一主控制器的第一网口连接于第二交换机的一侧,第一主控制 器的第二网口连接与第三交换机的一侧;各个子控制器的第一网口均分别连接 于第二交换机的另一侧,各个子控制器的第二网口均分别连接于第三交换机的 另一侧;第一主控制器的第一网口与第二网口互为冗余网口;子控制器的第一 网口与第二网口互为冗余网口;第一主控制器根据通过通信所识别到的各个子 控制器的参数信息对n个子控制器中的,各第一网口与第二交换机之间的网络 段路的网络状态,和/或各第二网口与第三交换机之间的网络段路上的网络状态 进行实时检测,以在任意第一网口与第二交换机之间的网络段路的网络状态, 和/或各第二网口与第三交换机之间的网络段路的网络状态发生异常时,与m个 子控制器构成重构网络拓扑结构。
[0015]
可选地,在第u个子控制器的第一网口与第二交换机之间的网络段路的网 络状态发生异常时,重构网络拓扑结构包括:第一主控制器的第一网口连接于 第二交换机的一侧,第一主控制器的第二网口连接与第三交换机的一侧;n个 子控制器中除去第u个子控制器后的m个子控制器的第一网口均分别连接于第 二交换机的另一侧,各个子控制器的第二网口均分别连接于第三交换机的另一 侧;其中,u为正整数,u≤n。
[0016]
可选地,主控制系统还包括第二主控制器,第二主控制器与第一主控制器 互为冗余控制器;第一主控制器和第二主控制器与n个子控制器构成网络拓扑 结构,并与各个子控制系统进行通信。
[0017]
可选地,第一主控制器的第一网口和第二主控制器的第一网口均分别连接 于第四交换机的一侧,第一主控制器的第二网口与第二主控制器的第二网口连 接;各个子控制器第一网口和第二网口均分别连接于第四交换机另一侧;第一 主控制器的第一网口与第二网口互为冗余网口;第二主控制器的第一网口与第 二网口互为冗余网口;子控制器的第一网口与第二网口互为冗余网口;第一主 控制器或第二主控制器根据通过通信所识别到的各个子控制器的参数信息对n 个子控制器中的,各第一网口和/或第二网口与第四交换机之间的网络段路上的 网络状态进行实时检测,以在任意第一网口和/或第二网口与第四交换机之间的 网络段路的网络状态发生异常时,与m个子控制器构成重构网络拓扑结构。
[0018]
可选地,在第u个子控制器的第一网口与第四交换机之间的网络段路的网 络状态发生异常时,重构网络拓扑结构包括:第一主控制器的第一网口和第二 主控制器的第一网口均分别连接于第四交换机的一侧,第一主控制器的第二网 口与第二主控制器的第二网
口连接;n个子控制器中除去第u个子控制器后的m 个子控制器的第一网口均分别连接于第四交换机的另一侧,各个子控制器的第 二网口均分别连接于第四交换机的另一侧;其中,u为正整数,u≤n。
[0019]
可选地,第一主控制器的第一网口连接于第五交换机的一侧,第一主控制 器的第二网口与第二主控制器的第二网口连接,第二主控制器的第一网口连接 于第六交换机的一侧;各个子控制器的第一网口均分别连接于第五交换机的另 一侧,各个子控制器的第二网口均分别连接于第六交换机的另一侧;第一主控 制器的第一网口与第二网口互为冗余网口;第二主控制器的第一网口与第二网 口互为冗余网口;子控制器的第一网口与第二网口互为冗余网口;第一主控制 器或第二主控制器根据通过通信所识别到的各个子控制器的参数信息对n个子 控制器中的,各第一网口与第五交换机之间的网络段路的网络状态,和/或各第 二网口与第六交换机之间的网络段路的网络状态进行实时检测,以在任意第一 网口与第五交换机之间的网络段路的网络状态,和/或各第二网口与第六交换机 之间的网络段路的网络状态发生异常时,与m个子控制器构成重构网络拓扑结 构。
[0020]
可选地,在第u个子控制器的第一网口与四五交换机之间的网络段路的网 络状态发生异常时,重构网络拓扑结构包括:第一主控制器的第一网口连接于 第五交换机的一侧,第一主控制器的第二网口与第二主控制器的第二网口连接, 第二主控制器的第一网口连接于第六交换机的一侧;n个子控制器中除去第u 个子控制器后的m个子控制器的第一网口均分别连接于第五交换机的另一侧, 各个子控制器的第二网口均分别连接于第六交换机的另一侧;其中,u为正整 数,u≤n。
[0021]
本发明实施例提供的船舶网络控制系统包括主控制系统和n个子控制系 统,各个子控制系统分别对应船舶的不同类型的控制系统,主控制系统与n个 子控制系统构成网络拓扑结构并与各个子控制系统进行通信。通过主控制系统 根据通过通信所识别到的各个子控制系统的参数信息对网络拓扑结构中的网络 段路的网络状态进行实时检测,以在网络段路的网络状态发生异常时,与m个 子控制系统构成重构网络拓扑结构(n和m均为正整数且m≤n),重构网络拓 扑结构中将网络状态发生异常的网络段路摒弃,从而保证船舶电能管理系统不 受异常网络段路影响而正常运行。
附图说明
[0022]
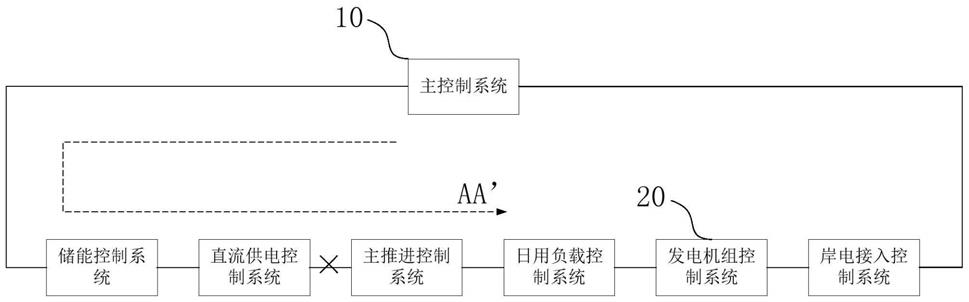
图1是本发明实施例提供的船舶网络控制系统的一种网络拓扑结构示意 图;
[0023]
图2是图1中网络拓扑结构的一种重构网络拓扑结构示意图;图3是图1中网络拓扑结构的一种添设子控制系统后的重构网络拓扑结构 示意图;
[0024]
图4是本发明实施例提供的船舶网络控制系统的另一种网络拓扑结构示意 图;
[0025]
图5是图4中单主控制环网络拓扑结构的一种重构网络拓扑结构示意图;
[0026]
图6是图4中单主控制环网络拓扑结构的一种添设子控制系统后的重构网 络拓扑结构示意图;
[0027]
图7是本发明实施例提供的船舶网络控制系统的另一种网络拓扑结构示意 图;
[0028]
图8是图7中单主控制单网络拓扑结构的一种重构网络拓扑结构示意图;
[0029]
图9是图7中单主控制单网络拓扑结构的一种添设子控制系统后的重构网 络拓扑结构示意图;
[0030]
图10是本发明实施例提供的船舶网络控制系统的另一种网络拓扑结构示 意图;
[0031]
图11是图10中单主控制双网络拓扑结构的一种重构网络拓扑结构示意图;
[0032]
图12是图10中单主控制双网络拓扑结构中的一种添设子控制系统后的重 构网络拓扑结构示意图;
[0033]
图13是本发明实施例提供的船舶网络控制系统的另一种网络拓扑结构示 意图;
[0034]
图14是图13的双主控制单网络拓扑结构的一种重构网络拓扑结构示意图;
[0035]
图15是图13中双主控制单网络拓扑结构中的一种添设子控制系统后的重 构网络拓扑结构示意图;
[0036]
图16是本发明实施例提供的船舶网络控制系统的另一种网络拓扑结构示 意图;
[0037]
图17是图16的双主控制双网络拓扑结构中的一种重构网络拓扑结构示意 图;
[0038]
图18是图16中双主控制双网络拓扑结构中添设子控制系统后的重构网络 拓扑结构示意图。
具体实施方式
[0039]
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此 处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需 要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结 构。
[0040]
图1是本发明实施例提供的船舶网络控制系统的一种网络拓扑结构示意 图,参考图1,该船舶网络控制系统包括:
[0041]
n个子控制系统20,各个子控制系统20分别对应船舶的不同类型的控制系 统;
[0042]
主控制系统10,主控制系统10与n个子控制系统20构成网络拓扑结构, 并与各个子控制系统20进行通信;
[0043]
主控制系统10根据通过通信所识别到的各个子控制系统20的参数信息对 网络拓扑结构中的网络段路的网络状态进行实时检测,以在网络段路的网络状 态发生异常时,与m个子控制系统20构成重构网络拓扑结构;其中,n和m均 为正整数,m≤n。
[0044]
本实施例中,一个子控制系统20对应船舶的一个类型的控制系统。例如子 控制系统20是船舶的储能控制系统、直流供电控制系统、发电机组控制系统、 主推进控制系统、侧推进控制系统、岸电接入控制系统或者日用负载控制系统 等。其中,储能控制系统用于船舶储能,例如超级电容;直流供电控制系统用 于对船舶直流供电,例如储能电池、动力电池、氢燃料电池或者太阳能电池等; 发电机组控制系统为船舶提供运行所需的各类发电机;主推进控制系统用于支 持船舶主推进运行;侧推进控制系统用于支持船舶侧推进运行;岸电接入控制 系统用于支持船舶的岸电连接;日用负载控制系统用于支持船舶的日用负载运 行,例如照明灯等。
[0045]
其中,储能控制系统、直流供电控制系统、主推进控制系统以及日用负载 控制系统属于船舶的必配子控制系统,必配子控制系统是任何船舶正常运行所 必须配置的子控制系统20;发电机组控制系统、侧推进控制系统以及岸电接入 控制系统等属于船舶的选配子控制系统,选配子控制系统是任何船舶正常运行 所可选的子控制系统20,必配子控制系统和选配子控制系统均可包括多种类型 的控制系统,上述仅作为对必配子控制系统和选配子控制系统示例性地列举, 不代表对本实施例的具体限定,不同船舶上所设置的子控制
系统20的类型和/ 或数量可以相同也可以不相同。
[0046]
船舶电能管理系统正常运行时必须基于船舶的配电通信网络,即船舶电能 管理系统正常运行时必须基于各子控制系统20与主控制系统10之间的通信, 才能实现对船舶的各子控制系统20的控制和管理,从而对船舶的电能进行管理 以及对船舶的各种负载进行协调控制,保障船舶稳定运行。主控制系统10能够 与n个子控制系统20构成多种类型的网络拓扑结构,从而主控制系统10与n 个子控制系统20有多种类型的通信方式。
[0047]
示例性地,参考图1,图1中由主控制系统10与6个子控制系统20构成 的网络拓扑结构,即n=6,储能控制系统作为第1个子控制系统20、直流供电 控制系统作为第2个子控制系统20、主推进控制系统作为第3个子控制系统20、 日用负载控制系统作为第4个子控制系统20、发电机组控制系统作为第5个子 控制系统20以及岸电接入控制系统作为第6个子控制系统20。第1个子控制 系统20、第2个子控制系统20、第3个子控制系统20、第4个子控制系统20、 第5个子控制系统20以及第6个子控制系统20从左至右顺次连接,第1个子 控制系统20和第6个子控制系统20分别与主控制系统10连接,主控制系统 10基于该网络拓扑结构可与6个子控制系统20沿线aa
’
方向进行通信,则船 舶电能管理系统的网络数据流传输方向沿线aa
’
方向,即船舶电能管理系统通 过沿线aa
’
方向传输的网络数据流对各个子控制系统20进行控制和管理,从 而对船舶的电能进行管理以及对船舶的各种负载进行协调控制,保障船舶稳定 运行。
[0048]
主控制系统10与n个子控制系统20构成网络拓扑结构时,主控制系统10 可分别对n个子控制系统20进行识别,主控制系统10可基于与子控制系统20 之间的通信对子控制系统20进行识别,识别内容可以是子控制系统20的类型 以及参数信息,类型例如是储能类型、直流供电类型、发电机组类型、主推进 类型、侧推进类型、岸电接入类型或者日用负载类型,参数信息例如是用电信 息、产品信息、型号信息、电压信息、电流信息和/或功率信息等。
[0049]
主控制系统10可根据所识别到的各个子控制系统20的参数信息与各子控 制系统20分别采用一问一答心跳报文的方式,实现主控制系统10对网络拓扑 结构中的网络段路的网络状态的实时检测。例如,主控制系统10每隔默认时间 向子控制系统20发出一次询问信号,其中,默认时间可设置为0.1毫秒至10 毫秒之间,例如1毫秒,子控制系统20收到该次询问信号后向主控制系统10 答复一次心跳报文信号。若在一定时间段内,主控制系统10向子控制系统20 发送连续两次询问信号,主控制系统10均没有收到子控制系统20的心跳报文 信号,则主控制系统10确认该子控制系统20所在网络段路的网络状态发生异 常,发生异常包括出现故障等,此时,由于网络状态异常的网络段路的存在, 船舶电能管理系统的网络数据流无法继续正常传输,从而船舶能量管理系统无 法继续正常运行。
[0050]
示例性地,参考图1,主控制系统10对第3个子控制系统20(即主推进控 制系统)每隔1毫秒发出一次询问信号,第3个子控制系统20收到该次询问信 号后向主控制系统10答复一次心跳报文信号。若在一定时间段内,主控制系统10向第3个子控制系统20发送连续两次询问信号,主控制系统10均没有收到 第3个子控制系统20的心跳报文信号,则主控制系统10确认第3个子控制系 统20所在网络段路的网络状态发生异常,即主控制系统10确认第3个子控制 系统20与第2个子控制系统20(即直流供电控制系统)之间的网络段路的网 络状态发生异常,或者第3个子控制系统20与第4个子控制系统20(即日用 负载控制系统)之
间的网络段路的网络状态发生异常,这时若主控制系统10向 第2个子控制系统20发送连续两次询问信号,主控制系统10也均没有收到第 2个子控制系统20的心跳报文信号,则主控制系统10确认第3个子控制系统 20与第2个子控制系统20之间的网络段路的网络状态发生异常,如图1中用
ꢀ“×”
对示意网络状态发生异常的网络段路。
[0051]
本实施例中,主控制系统10确认网络状态发生异常的网络段路后,主控制 系统10与m个子控制系统20构成重构网络拓扑结构,重构网络拓扑结构中摒 弃原先网络状态发生异常的网络段路且保留网络状态未发生异常的网络段路, 主控制系统10基于重构网络拓扑结构与子控制系统20进行通信,船舶电能管 理系统的网络数据流方向同样基于重构网络拓扑结构,保证船舶电能管理系统 不受异常网络段路的影响继续正常运行,其中,m≤n。
[0052]
示例性地,图2是图1中网络拓扑结构的一种重构网络拓扑结构示意图, 参考图2,重构网络拓扑结构中摒弃原先出现网络状态异常的第3个子控制系 统20与第2个子控制系统20之间的网络段路,且保留第3个子控制系统20与 第2个子控制系统20之间网络段路以外的网络段路,主控制系统10基于重构 网络拓扑结构与6个子控制系统20沿线bb
’
方向以及线cc
’
方向通信,船舶 电能管理系统通过沿线bb
’
方向以及线cc
’
方向传输的网络数据流对各个子控 制系统20进行控制和管理,保证船舶电能管理系统不受异常网络段路影响继续 正常运行,其中,m=6。
[0053]
可选地,本实施例提供的船舶网络控制系统,对船舶添设子控制系统20时 也能够构成重构网络拓扑结构。具体在于,主控制系统10对所添设的子控制系 统20的参数信息进行识别,并且在原有网络拓扑结构的基础上与所有子控制系 统20(所有子控制系统20为原有网络拓扑结构中的子控制系统20和所添设的 子控制系统20)构成重构网络拓扑结构。据此,本实施例的船舶网络控制系统 能够适用于不同配置的船舶,即能够适用于配置有不同种类和/或数量子控制系 统20的船舶,或者对于同一条船舶而言其配置可以随添随减,无论是添设子控 制系统20还是减设子控制系统20,主控制系统10均会在原有网络拓扑结构的 基础上与所有所配置的子控制系统20构成重构网络拓扑结构,不影响船舶能量 管理系统的正常运行,灵活性、普适性以及经济性较好,有利于船舶的广泛应 用。
[0054]
示例性地,图3是图1中网络拓扑结构的一种添设子控制系统后的重构网 络拓扑结构示意图,参考图3,对船舶添设侧推进控制系统,侧推进控制系统 可作为第7个子控制系统20,即在添设侧推进控制系统后,主控制系统10与7 个子控制系统20构成重构网络网络拓扑结构,船舶电能管理系统的网络数据流 传输方向同样沿线aa
’
方向,不影响船舶能量管理系统的正常运行。反过来, 图1是图3中网络拓扑结构的一种减设子控制系统后的重构网络拓扑结构示意 图,即在图3的网络拓扑结构中对船舶减设侧推进控制系统后,形成图1所示 的重构网络拓扑结构。
[0055]
可选地,主控制系统10包括第一主控制器;每个子控制系统20包括一个 子控制器;第一主控制器与n个子控制器构成网络拓扑结构,并与各个子控制 器进行通信。
[0056]
具体地,第一主控制器可包括双冗余中央处理器cpu和数字信号处理器 dsp,并以现场总线和以太网为基础,采用冗余通信配置,通过modbus通信协 议与子控制系统20进行网络数据交换。每一个子控制器可包括双冗余中央处理 器cpu,并以现场总线为基础,采用冗余通信配置,通过modbus通信协议与主 控制系统10进行网络数据交换。主控制系统10与n个子控制系统20构成网络 拓扑结构,具体可以是第一子控制器与n个子控制器构成网络
拓扑结构。
[0057]
可选地,图4是本发明实施例提供的船舶网络控制系统的另一种网络拓扑 结构示意图,参考图4,第一主控制器101的第一网口a与第1个子控制器的 第一网口a连接;第n-1个子控制器的第二网口b与第n个子控制器的第一网 口a连接;第n个子控制器的第二网口b与第一主控制器101的第二网口b连 接;第一主控制器101的第一网口a与第二网口b互为冗余网口;子控制器的 第一网口a与第二网口b互为冗余网口;第一主控制器101根据通过通信所识 别到的各个子控制器的参数信息对n个子控制器中的,各第一网口a与第二网 口b之间的网络段路的网络状态进行实时检测,以在任意第一网口a与第二网 口b之间的网络段路的网络状态发生异常时,与m个子控制器构成重构网络拓 扑结构,其中,m≤n。
[0058]
具体地,图4中由第一主控制器101与n个子控制器构成的网络拓扑结构 为单主控制环网络拓扑结构。
[0059]
示例性地,图4所示的单主控制环网络拓扑结构中,主控制系统10包括第 一主控制器101,n=6,储能控制系统包括第一子控制器201、直流供电控制系 统包括第二子控制器202、主推进控制系统包括第三子控制器203、日用负载控 制系统包括第四子控制器204、发电机组控制系统包括第五子控制器205以及 岸电接入控制系统包括第六子控制器206。第一子控制器201作为第1个子控 制器、第二子控制器202作为第2个子控制器、第三子控制器203作为第3个 子控制器、第四子控制器204作为第4个子控制器、第五子控制器205作为第 5个子控制器以及第六子控制器206作为第6个子控制器。第一主控制器101 基于单主控制环网络拓扑结构可沿线aa
’
方向分别与6个子控制器通信,则船 舶电能管理系统的网络数据流传输方向沿线aa
’
方向,即船舶电能管理系统通 过沿线aa
’
方向传输的网络数据流对各个子控制器进行控制和管理,从而对各 个子控制系统20进行控制和管理,从而对船舶的电能进行管理以及对船舶的各 种负载进行协调控制,保障船舶稳定运行。
[0060]
第一主控制器101与n个子控制器构成单主控制环网络拓扑结构时,第一 主控制器101可分别对n个子控制器进行识别,第一主控制器101可基于与子 控制器之间的通信对子控制器进行识别,第一主控制器101通过对子控制器的 识别以对子控制系统20的类型以及参数信息进行识别。
[0061]
第一主控制器101可根据所识别到的各个子控制系统20的参数信息与各子 控制器分别采用一问一答心跳报文的方式,实现第一主控制器101对单主控制 环网络拓扑结构中,n个子控制器中的各第一网口a与第二网口b之间的网络 段路的网络状态的实时检测,以在任意第一网口a与第二网口b之间的网络段 路的网络状态发生异常时,与m个子控制器构成重构网络拓扑结构,重构网络 拓扑结构中摒弃原先网络状态发生异常的网络段路且保留网络状态未发生异常 的网络段路,主控制系统10基于重构网络拓扑结构与子控制系统20进行通信, 船舶电能管理系统的网络数据流方向同样基于重构网络拓扑结构,保证船舶电 能管理系统不受异常网络段路的影响继续正常运行。
[0062]
可选地,图5是图4中单主控制环网络拓扑结构的一种重构网络拓扑结构 示意图,单主控制环网络拓扑结构的第u个子控制器的第二网口b与第v个子 控制器的第一网口a之间的网络段路的网络状态发生异常时,重构网络拓扑结 构包括:
[0063]
第一主控制器101的第一网口a与第1个子控制器的第一网口a连接;
[0064]
第u-1个子控制器的第二网口b与第u个子控制器的第一网口a连接;
[0065]
第v个子控制器的第二网口b与第v+1个子控制器的第一网口a连接;
[0066]
第n个子控制器的第二网口b与第一主控制器101的第二网口b连接;
[0067]
其中,u和v均为正整数,u<v<n,第u个子控制器与第v个子控制器相 邻。
[0068]
示例性地,参考图4与图5,u=2且v=3,在图4中用
“×”
示意单主控 制环网络拓扑结构中第3个子控制器(即第三子控制器203)的第一网口a与 第2个子控制器(即第二子控制器201)的第二网口b之间的网络段路的网络 状态发生异常,图5中的重构网络拓扑结构中摒弃原先出现在第3个子控制器 的第一网口a与第2个子控制器的第二网口b之间的网络状态发生异常的网络 段路,第一主控制器101基于重构网络拓扑结构与6个子控制器沿线bb
’
方向 以及线cc
’
方向通信,船舶电能管理系统通过沿线bb
’
方向以及线cc
’
方向 传输的网络数据流对各个子控制器进行控制和管理,从而对各个子控制系统20 进行控制和管理,保证船舶电能管理系统不受异常网络段路影响继续正常运行, 其中,m=6。
[0069]
可选地,对船舶添设子控制系统20时,单主控制环网络拓扑结构也能够构 成重构网络拓扑结构。具体在于,第一主控制器101通过对所添设的子控制系 统20的子控制器进行识别,以识别所添设的子控制系统20的参数信息,并且 在原有单主控制环网络拓扑结构的基础上与所有子控制器(所有子控制器为原 有单主控制环网络拓扑结构中的子控制器和所添设的子控制系统20的子控制 器)构成重构网络拓扑结构,从而适用于不同配置的船舶,即能够适用于配置 有不同种类和/或数量子控制系统20的船舶,或者对于同一条船舶而言其配置 可以随添随减,无论是添设子控制系统20还是减设子控制系统20,第一主控 制器101均会在原有单主控制环网络拓扑结构的基础上与所有所配置的子控制 系统20的子控制器构成重构网络拓扑结构,不影响船舶能量管理系统的正常运 行,灵活性、普适性以及经济性较好,有利于船舶的广泛应用。
[0070]
示例性地,图6是图4中单主控制环网络拓扑结构的一种添设子控制系统 后的重构网络拓扑结构示意图,参考图6,对船舶添设侧推进控制系统,侧推 进控制系统包括第七子控制器207,第七子控制器207的第一网口a与第五子 控制器205的第二网口b连接,第七子控制器207的第二网口b与第六子控制 器206的第一网口a连接,船舶电能管理系统的网络数据流传输方向同样沿线 aa
’
方向,不影响船舶能量管理系统的正常运行。反过来,图4是图6中单主 控制环网络拓扑结构的一种减设子控制系统后的重构网路拓扑结构示意图,即 在图6的单主控制环网络拓扑结构中对船舶减设侧推进系统后,形成图4所示 的重构网络拓扑结构。
[0071]
可选地,图7是本发明实施例提供的船舶网络控制系统的另一种网络拓扑 结构示意图,参考图7,第一主控制器101的第一网口a和/或第二网口b连接 于第一交换机301的一侧;各个子控制器的第一网口a和/或第二网口b分别连 接于第一交换机301的另一侧;第一主控制器101的第一网口a与第二网口b 互为冗余网口;子控制器的第一网口a与第二网口b互为冗余网口;第一主控 制器101根据通过通信所识别到的各个子控制器的参数信息对n个子控制器中 的,各第一网口a和/或第二网口b与第一交换机301之间的网络段路的网络状 态进行实时检测,以在任意第一网口a和/或第二网口b与第一交换机301之间 的网络段路的网络状态发生异常时,与m个子控制器构成重构网络拓扑结构, 其中,m≤n。
[0072]
具体地,图7中由第一主控制器101与n个子控制器通过第一交换机301 构成的网络拓扑结构为单主控制单网络拓扑结构。
[0073]
示例性地,图7所示的单主控制单网络拓扑结构中,主控制系统10包括第 一主控制器101,n=6,储能控制系统包括第一子控制器201、直流供电控制系 统包括第二子控制器202、主推进控制系统包括第三子控制器203、日用负载控 制系统包括第四子控制器204、发电机组控制系统包括第五子控制器205以及 岸电接入控制系统包括第六子控制器206。第一子控制器201作为第1个子控 制器、第二子控制器202作为第2个子控制器、第三子控制器203作为第3个 子控制器、第四子控制器204作为第4个子控制器、第五子控制器205作为第 5个子控制器以及第六子控制器206作为第6个子控制器。第一主控制器101 的第一网口a和第二网口b均连接于第一交换机301的一侧;各个子控制器的 第一网口a和第二网口b分别均连接于第一交换机301的另一侧。第一主控制 器101基于单主控制单网络拓扑结构可分别沿线dd
’
方向与6个子控制器通信, 则船舶电能管理系统的网络数据流传输方向沿线dd
’
方向,即船舶电能管理系 统通过沿线dd
’
方向传输的网络数据流对各个子控各个子控制器进行控制和管 理,从而对各个子控制系统20进行控制和管理,从而对船舶的电能进行管理以 及对船舶的各种负载进行协调控制,保障船舶稳定运行。
[0074]
第一主控制器101可根据所识别到的各个子控制系统20的参数信息与各个 子控制器之间分别采用一问一答心跳报文的方式,实现对n个子控制器中的, 各第一网口a和/或第二网口b与第一交换机301之间的网络段路的网络状态的 实时检测,以在任意第一网口a以及第二网口b与第一交换机301之间的网络 段路的网络状态发生异常时,与m个子控制器构成重构网络拓扑结构,重构网 络拓扑结构中摒弃原先网络状态发生异常的网络段路且保留网络状态未发生异 常的网络段路,主控制系统10基于重构网络拓扑结构与子控制系统20进行通 信,船舶电能管理系统的网络数据流方向同样基于重构网络拓扑结构,保证船 舶电能管理系统不受异常网络段路的影响继续正常运行。
[0075]
可选地,图8是图7中单主控制单网络拓扑结构的一种重构网络拓扑结构 示意图,单主控制单网络拓扑结构的第u个子控制器的第一网口a和第二网口 b与第一交换机301之间的网络段路的网络状态均发生异常时,重构网络拓扑 结构包括:
[0076]
第一主控制器101的第一网口a和/或第二网口b连接于第一交换机301的 一侧;n个子控制器中除去第u个子控制器后的m个子控制器的第一网口a和/ 或第二网口b分别连接于第一交换机301的另一侧;其中,u为正整数,u≤n。
[0077]
示例性地,参考图7与图8,u=2,在图7中用
“×”
示意单主控制单网 络拓扑结构中第2个子控制器的第一网口a和第二网口b与第一交换机301之 间的网络段路的网络状态均发生异常,图8中的重构网络拓扑结构中摒弃原先 出现在第2个子控制器的第一网口a和第二网口b与第一交换机301之间的网 络状态发生异常的网络段路,第一主控制器101基于重构网络拓扑结构与5个 子控制器沿dd
’
方向通信,船舶电能管理系统通过沿dd
’
方向传输的网络数据 流对各个子控制器进行控制和管理,从而对各个子控制系统20进行控制和管 理,保证船舶电能管理系统不受异常网络段路影响继续正常运行,其中,m=5。
[0078]
可选地,对船舶添设子控制系统20时,单主控制单网络拓扑结构也能够构 成重构网络拓扑结构。具体在于,第一主控制器101通过对所添设的子控制系 统20的子控制器进行识别,以识别所添设的子控制系统20的参数信息,并且 在原有单主控制单网络拓扑结构的基础上与所有子控制器(所有子控制器为原 有单主控制单网络拓扑结构中的子控制器和所添设的子控制系统20的子控制 器)构成重构网络拓扑结构,从而适用于不同配置的船
舶,即能够适用于配置 有不同种类和/或数量子控制系统20的船舶,或者对于同一条船舶而言其配置 可以随添随减,无论是添设子控制系统20还是减设子控制系统20,第一主控 制器101均会在原有单主控制环网络拓扑结构的基础上与所有所配置的子控制 系统20的子控制器构成重构网络拓扑结构,不影响船舶能量管理系统的正常运 行,灵活性、普适性以及经济性较好,有利于船舶的广泛应用。
[0079]
示例性地,图9是图7中单主控制单网络拓扑结构的一种添设子控制系统 后的重构网络拓扑结构示意图,参考图9,对船舶添设侧推进控制系统,侧推 进控制系统包括第七子控制器207,第七子控制器207的第一网口a和第二网 口b均连接于第一交换机30的另一侧,船舶电能管理系统的网络数据流传输方 向同样沿线dd
’
方向,不影响船舶能量管理系统的正常运行。反过来,图7是 图9中单主控制单网络拓扑结构的一种减设子控制系统后的重构网路拓扑结构 示意图,即在图9的单主控制单网络拓扑结构中对船舶减设侧推进系统后,形 成图7所示的重构网络拓扑结构。
[0080]
可选地,图10是本发明实施例提供的船舶网络控制系统的另一种网络拓扑 结构示意图,参考图10,第一主控制器101的第一网口a连接于第二交换机302 的一侧,第一主控制器101的第二网口b连接于第三交换机303的一侧;各个 子控制器的第一网口a均分别连接于第二交换机302的另一侧,各个子控制器 的第二网口b均分别连接于第三交换机303的另一侧;第一主控制器101的第 一网口a与第二网口b互为冗余网口;子控制器的第一网口a与第二网口b互 为冗余网口;第一主控制器101根据通过通信所识别到的各个子控制器的参数 信息对n个子控制器中的,各第一网口a与第二交换机302之间的网络段路的 网络状态,和/或各第二网口b与第三交换机303之间的网络段路上的网络状态 进行实时检测,以在任意第一网口a与第二交换机302之间的网络段路的网络 状态,和/或各第二网口b与第三交换机303之间的网络段路的网络状态发生异 常时,与m个子控制器构成重构网络拓扑结构,其中,m≤n。
[0081]
具体地,图10中由第一主控制器101与n个子控制器通过第二交换机302 和第三交换机303构成的网络拓扑结构为单主控制双网络拓扑结构。
[0082]
示例性地,图10所示的单主控制双网络拓扑结构中,主控制系统10包括 第一主控制器101,n=6,储能控制系统包括第一子控制器201、直流供电控制 系统包括第二子控制器202、主推进控制系统包括第三子控制器203、日用负载 控制系统包括第四子控制器204、发电机组控制系统包括第五子控制器205以 及岸电接入控制系统包括第六子控制器206。第一子控制器201作为第1个子 控制器、第二子控制器202作为第2个子控制器、第三子控制器203作为第3 个子控制器、第四子控制器204作为第4个子控制器、第五子控制器205作为 第5个子控制器以及第六子控制器206作为第6个子控制器。第一主控制器101 基于单主控制双网络拓扑结构可分别沿线ee
’
方向与6个子控制器通信,则船 舶电能管理系统的网络数据流传输方向沿线ee
’
方向,即船舶电能管理系统通 过沿线ee
’
方向传输的网络数据流对各个子控各个子控制器进行控制和管理, 从而对各个子控制系统20进行控制和管理,从而对船舶的电能进行管理以及对 船舶的各种负载进行协调控制,保障船舶稳定运行。
[0083]
第一主控制器101可根据所识别到的各个子控制系统20的参数信息与各个 子控制器之间分别采用一问一答心跳报文的方式,实现对n个子控制器中的, 各第一网口a与第二交换机302之间的网络段路的网络状态,和/或各第二网口 b与第三交换机303之间的网
络段路上的网络状态的实时检测,以在任意第一 网口a与第二交换机302之间的网络段路的网络状态,和/或各第二网口b与第 三交换机303之间的网络段路的网络状态发生异常时,与m个子控制器构成重 构网络拓扑结构,重构网络拓扑结构中摒弃原先网络状态发生异常的网络段路 且保留网络状态未发生异常的网络段路,主控制系统10基于重构网络拓扑结构 与子控制系统20进行通信,船舶电能管理系统的网络数据流方向同样基于重构 网络拓扑结构,保证船舶电能管理系统不受异常网络段路的影响继续正常运行。
[0084]
可选地,图11是图10中单主控制双网络拓扑结构的一种重构网络拓扑结 构示意图,单主控制双网络结构的第u个子控制器的第一网口a与第二交换机 302之间的网络段路的网络状态发生异常时,重构网络拓扑结构包括:
[0085]
第一主控制器101的第一网口a连接于第二交换机302的一侧,第一主控 制器101的第二网口b连接与第三交换机303的一侧;n个子控制器中除去第u 个子控制器后的m个子控制器的第一网口a均分别连接于第二交换机302的另 一侧,各个子控制器的第二网口b均分别连接于第三交换机303的另一侧;其 中,u为正整数,u≤n。
[0086]
示例性地,参考图10与图11,u=2,在图10中用
“×”
示意单主控制双 网络拓扑结构中第2个子控制器的第一网口a与第二交换机302之间的网络段 路的网络状态发生异常,图11中的重构网络拓扑结构中摒弃原先出现在第2个 子控制器的第一网口a与第二交换机302之间的网络状态发生异常的网络段路, 第一主控制器101基于重构网络拓扑结构与6个子控制器沿线ee
’
方向通信, 船舶电能管理系统通过沿线ee
’
方向传输的网络数据流对各个子控制器进行控 制和管理,从而对各个子控制系统20进行控制和管理,保证船舶电能管理系统 不受异常网络段路影响继续正常运行,其中,m=6。
[0087]
可选地,对船舶添设子控制系统20时,单主控制双网络结构也能够构成重 构网络拓扑结构。具体在于,第一主控制器101通过对所添设的子控制系统20 的子控制器进行识别,以识别所添设的子控制系统20的参数信息,并且在原有 单主控制双网络拓扑结构的基础上与所有子控制器(所有子控制器为原有单主 控制双网络拓扑结构中的子控制器和所添设的子控制系统20的子控制器)构成 重构网络拓扑结构,从而适用于不同配置的船舶,即能够适用于配置有不同种 类和/或数量子控制系统20的船舶,或者对于同一条船舶而言其配置可以随添 随减,无论是添设子控制系统20还是减设子控制系统20,第一主控制器101 均会在原有单主控制环网络拓扑结构的基础上与所有所配置的子控制系统20 的子控制器构成重构网络拓扑结构,不影响船舶能量管理系统的正常运行,灵 活性、普适性以及经济性较好,有利于船舶的广泛应用。
[0088]
示例性地,图12是图10中单主控制双网络拓扑结构中的一种添设子控制 系统后的重构网络拓扑结构示意图,参考图12,对船舶添设侧推进控制系统, 侧推进控制系统包括第七子控制器207,第七子控制器207的第一网口a连接 于第二交换机302的另一侧,第七子控制器207的第二网口b连接于第三交换 机303的另一侧,船舶电能管理系统的网络数据流传输方向同样沿线ee
’
方向, 不影响船舶能量管理系统的正常运行。反过来,图10是图12中单主控制双网 络拓扑结构的一种减设子控制系统后的重构网络拓扑结构示意图,即在图12的 单主控制双网络拓扑结构中对船舶减设侧推进系统后,形成图10所示的重构网 络拓扑结构。
[0089]
此外,单主控制双网络拓扑结构相较于单主控制单网络拓扑结构,采用第 二交换
机302和第三交换机303两个交换机形成双网络,在其中一个网络发生 异常时,更容易通过另外一个网络支持船舶电能管理系统继续正常运行,且两 个网络之间隔离性较好不会互相影响,每个交换机的工作量较小,保证船舶网 络控制系统的使用寿命。
[0090]
可选地,主控制系统10还包括第二主控制器,第二主控制器与第一主控制 器101互为冗余控制器;第一主控制器101和第二主控制器与n个子控制器构 成网络拓扑结构,并与各个子控制系统20进行通信。
[0091]
具体地,第二主控制器可包括双冗余中央处理器cpu和数字信号处理器 dsp,并以现场总线和以太网为基础,采用冗余通信配置,通过modbus通信协 议与子控制系统20进行网络数据交换。
[0092]
可选地,图13是本发明实施例提供的船舶网络控制系统的另一种网络拓 扑结构示意图,参考图13,第一主控制器101的第一网口a和第二主控制器102 的第一网口a均分别连接于第四交换机304的一侧,第一主控制器101的第二 网口a与第二主控制器102的第二网口b连接;各个子控制器第一网口a和第 二网口b均分别连接于第四交换机304另一侧;第一主控制器101的第一网口 a与第二网口b互为冗余网口;第二主控制器102的第一网口a与第二网口b 互为冗余网口;子控制器的第一网口a与第二网口b互为冗余网口;第一主控 制器101或第二主控制器102根据通过通信所识别到的各个子控制器的参数信 息对n个子控制器中的,各第一网口a和/或第二网口b与第四交换机304之间 的网络段路上的网络状态进行实时检测,以在任意第一网口a和/或第二网口b 与第四交换机304之间的网络段路的网络状态发生异常时,与m个子控制器构 成重构网络拓扑结构,其中,m≤n。
[0093]
具体地,图13中由第一主控制器101和第二主控制器102与n个子控制器 通过第四交换机304构成的网络拓扑结构为双主控制单网络拓扑结构。
[0094]
示例性地,图13中所示的双主控制单网络拓扑结构中,主控制系统10包 括第一主控制器101和第二主控制器102,n=6,储能控制系统包括第一子控 制器201、直流供电控制系统包括第二子控制器202、主推进控制系统包括第三 子控制器203、日用负载控制系统包括第四子控制器204、发电机组控制系统包 括第五子控制器205以及岸电接入控制系统包括第六子控制器206。第一子控 制器201作为第1个子控制器、第二子控制器202作为第2个子控制器、第三 子控制器203作为第3个子控制器、第四子控制器204作为第4个子控制器、 第五子控制器205作为第5个子控制器以及第六子控制器206作为第6个子控 制器。第一主控制器101或者第二主控制器102基于双主控制单网络拓扑结构 可分别沿线ff
’
方向与6个子控制器通信,则船舶电能管理系统的网络数据流 传输方向沿线ff
’
方向,即船舶电能管理系统通过沿线ff
’
方向传输的网络数 据流对各个子控各个子控制器进行控制和管理,从而对各个子控制系统20进行 控制和管理,从而对船舶的电能进行管理以及对船舶的各种负载进行协调控制, 保障船舶稳定运行。
[0095]
第一主控制器101或者第二主控制器102可根据所识别到的各个子控制系 统20的参数信息与各个子控制器之间分别采用一问一答心跳报文的方式,实现 对n个子控制器中的,各第一网口a和/或第二网口b与第四交换机304之间的 网络段路上的网络状态的实时检测,以在任意第一网口a和/或第二网口b与第 四交换机304之间的网络段路的网络状态发生异常时,与m个子控制器构成重 构网络拓扑结构,重构网络拓扑结构中摒弃原先网络状态发生异常的网络段路 且保留网络状态未发生异常的网络段路,主控制系统10基于重
构网络拓扑结构 与子控制系统20进行通信,船舶电能管理系统的网络数据流方向同样基于重构 网络拓扑结构,保证船舶电能管理系统不受异常网络段路的影响继续正常运行。
[0096]
可选地,图14是图13的双主控制单网络拓扑结构的一种重构网络拓扑结 构示意图,双主控制单网络拓扑结构的第u个子控制器的第一网口a与第四交 换机304之间的网络段路的网络状态发生异常时,重构网络拓扑结构包括:
[0097]
第一主控制器101的第一网口a和第二主控制器102的第一网口a均分别 连接于第四交换机304的一侧,第一主控制器101的第二网口a与第二主控制 器102的第二网口b连接;n个子控制器中除去第u个子控制器后的m个子控 制器的第一网口a均分别连接于第四交换机304的另一侧,各个子控制器的第 二网口b均分别连接于第四交换机304的另一侧;其中,u为正整数,u≤n。
[0098]
示例性地,参考图13与图14,u=2,在图13中用
“×”
示意双主控制单 网络拓扑结构中第2个子控制器的第一网口a与第四交换机304之间的网络段 路的网络状态发生异常,图14中的重构网络拓扑结构中摒弃原先出现在第2个 子控制器的第一网口a与第四交换机304之间的网络状态发生异常的网络段路, 第一主控制器101或者第二主控制器102基于重构网络拓扑结构与6个子控制 器沿线ff
’
方向通信,船舶电能管理系统通过沿线ff
’
方向传输的网络数据流 对各个子控制器进行控制和管理,从而对各个子控制系统20进行控制和管理, 保证船舶电能管理系统不受异常网络段路影响继续正常运行,其中,m=6。
[0099]
可选地,对船舶添设子控制系统20时,双主控制单网络结构也能够构成重 构网络结构。具体在于,第一主控制器101或者第二主控制器102通过对所添 设的子控制系统20的子控制器进行识别,以识别所添设的子控制系统20的参 数信息,并且在原有双主控制单网络结构的基础上与所有子控制器(所有子控 制器为原有双主控制单网络拓扑结构中的子控制器和所添设的子控制系统20 的子控制器)构成重构网络拓扑结构,从而适用于不同配置的船舶,即能够适 用于配置有不同种类和/或数量子控制系统20的船舶,或者对于同一条船舶而 言其配置可以随添随减,无论是添设子控制系统20还是减设子控制系统20, 第一主控制器101均会在原有单主控制环网络拓扑结构的基础上与所有所配置 的子控制系统20的子控制器构成重构网络拓扑结构,不影响船舶能量管理系统 的正常运行,灵活性、普适性以及经济性较好,有利于船舶的广泛应用。
[0100]
示例性地,图15是图13中双主控制单网络拓扑结构中的一种添设子控制 系统后的重构网络拓扑结构示意图,参考图15,对船舶添设侧推进控制系统, 侧推进控制系统包括第七子控制器207,第七子控制器207的第一网口a和第 二网口b均连接于第四交换机304的另一侧,船舶电能管理系统的网络数据流 传输方向同样沿线ff
’
方向,不影响船舶能量管理系统的正常运行。反过来, 图13是图15中双主控制单网络拓扑结构的一种减设子控制系统后的重构网络 拓扑结构示意图,即在图15的双主控制单网络拓扑结构中对船舶减设侧推进系 统后,形成图13所示的重构网络拓扑结构。
[0101]
此外,双主控制单网络拓扑结构相较于单主控制单网络拓扑结构,采用第 一主控制器101和第二主控制器102两个主控制器,两个主控制器可以互相实 时检测,在一个主控制器发生异常时,另一个主控制器即可接管与子控制系统 之间的通信,即摒弃异常主控制器,保证船舶电能管理系统继续正常运行。
[0102]
可选地,图16是本发明实施例提供的船舶网络控制系统的另一种网络拓扑 结构
示意图,参考图16,第一主控制器101的第一网口a连接于第五交换机305 的一侧,第一主控制器101的第二网口a与第二主控制器102的第二网口b连 接,第二主控制器102的第一网口a连接于第六交换机306的一侧;各个子控 制器的第一网口a均分别连接于第五交换机305的另一侧,各个子控制器的第 二网口b均分别连接于第六交换机306的另一侧;第一主控制器101的第一网 口a与第二网口b互为冗余网口;第二主控制器102的第一网口a与第二网口b互为冗余网口;子控制器的第一网口a与第二网口b互为冗余网口;第一主 控制器101或第二主控制器102根据通过通信所识别到的各个子控制器的参数 信息对n个子控制器中的,各第一网口a与第五交换机305之间的网络段路的 网络状态,和/或各第二网口b与第六交换机306之间的网络段路的网络状态进 行实时检测,以在任意第一网口a与第五交换机305之间的网络段路的网络状 态,和/或各第二网口b与第六交换机306之间的网络段路的网络状态发生异常 时,与m个子控制器构成重构网络拓扑结构,其中,m≤n。
[0103]
具体地,图16中由第二主控制器101和第二主控制器102与n个子控制器 通过第五交换机305和第六交换机306构成的网络拓扑结构为双主控制双网络 拓扑结构。
[0104]
示例性地,图16中所示的双主控制双网络拓扑结构中,主控制系统10包 括第一主控制器101和第二主控制器102,n=6,储能控制系统包括第一子控 制器201、直流供电控制系统包括第二子控制器202、主推进控制系统包括第三 子控制器203、日用负载控制系统包括第四子控制器204、发电机组控制系统包 括第五子控制器205以及岸电接入控制系统包括第六子控制器206。第一子控 制器201作为第1个子控制器、第二子控制器202作为第2个子控制器、第三 子控制器203作为第3个子控制器、第四子控制器204作为第4个子控制器、 第五子控制器205作为第5个子控制器以及第六子控制器206作为第6个子控 制器。第一主控制器101或者第二主控制器102基于双主控制双网络拓扑结构 可分别沿线gg
’
方向与6个子控制器通信,则船舶电能管理系统的网络数据流 传输方向沿线gg
’
方向,即船舶电能管理系统通过沿线gg
’
方向传输的网络数 据流对各个子控各个子控制器进行控制和管理,从而对各个子控制系统20进行 控制和管理,从而对船舶的电能进行管理以及对船舶的各种负载进行协调控制, 保障船舶稳定运行。
[0105]
第一主控制器101或者第二主控制器102可根据所识别到的各个子控制系 统20的参数信息与各个子控制器之间分别采用一问一答心跳报文的方式,实现 对n个子控制器中的,各第一网口a与第五交换机305之间的网络段路的网络 状态,和/或各第二网口b与第六交换机306之间的网络段路的网络状态的实时 检测,以在任意第一网口a与第五交换机305之间的网络段路的网络状态,和/ 或各第二网口b与第六交换机306之间的网络段路的网络状态发生异常时,与 m个子控制器构成重构网络拓扑结构,重构网络拓扑结构中摒弃原先网络状态 发生异常的网络段路且保留网络状态未发生异常的网络段路,主控制系统10基 于重构网络拓扑结构与子控制系统20进行通信,船舶电能管理系统的网络数据 流方向同样基于重构网络拓扑结构,保证船舶电能管理系统不受异常网络段路 的影响继续正常运行。
[0106]
可选地,图17是图16的双主控制双网络拓扑结构中的一种重构网络拓扑 结构示意图,双主控制双网络拓扑结构的第u个子控制器的第一网口a与第五 交换机305之间的网络段路的网络状态发生异常时,重构网络拓扑结构包括:
[0107]
第一主控制器101的第一网口a连接于第五交换机305的一侧,第一主控 制器101
的第二网口a与第二主控制器102的第二网口b连接,第二主控制器 102的第一网口a连接于第六交换机306的一侧;
[0108]
n个子控制器中除去第u个子控制器后的m个子控制器的第一网口a均分 别连接于第五交换机305的另一侧,各个子控制器的第二网口b均分别连接于 第六交换机306的另一侧;其中,u为正整数,u≤n。
[0109]
示例性地,参考图16与图17,u=2,在图16中用
“×”
示意双主控制双 网络拓扑结构中第2个子控制器的第一网口a与第五交换机305之间的网络段 路的网络状态发生异常,图17中的重构网络拓扑结构中摒弃原先出现在第2个 子控制器的第一网口a与第五交换机305之间的网络状态发生异常的网络段路, 第一主控制器101或者第二主控制器102基于重构网络拓扑结构与6个子控制 器沿线gg
’
方向通信,船舶电能管理系统通过沿线gg
’
方向传输的网络数据流 对各个子控制器进行控制和管理,从而对各个子控制系统20进行控制和管理, 保证船舶电能管理系统不受异常网络段路影响继续正常运行,其中,m=6。
[0110]
可选地,对船舶添设子控制系统20时,双主控制双网络结构也能够构成重 构网络拓扑结构。具体在于,第一主控制器101通过对所添设的子控制系统20 的子控制器进行识别,以识别所添设的子控制系统20的参数信息,并且在原有 双主控制双网络拓扑结构的基础上与所有子控制器(所有子控制器为原有双主 控制双网络拓扑结构中的子控制器和所添设的子控制系统20的子控制器)构成 重构网络拓扑结构,从而适用于不同配置的船舶,即能够适用于配置有不同种 类和/或数量子控制系统20的船舶,或者对于同一条船舶而言其配置可以随添 随减,无论是添设子控制系统20还是减设子控制系统20,第一主控制器101 均会在原有单主控制环网络拓扑结构的基础上与所有所配置的子控制系统20 的子控制器构成重构网络拓扑结构,不影响船舶能量管理系统的正常运行,灵 活性、普适性以及经济性较好,有利于船舶的广泛应用。
[0111]
示例性地,图18是图16中双主控制双网络拓扑结构中添设子控制系统后 的重构网络拓扑结构示意图,参考图18,对船舶添设侧推进控制系统,侧推进 控制系统包括第七子控制器207,第七子控制器207的第一网口a连接于第五 交换机305的另一侧,第七子控制器207的第二网口b连接于第六交换机306 的另一侧,船舶电能管理系统的网络数据流传输方向同样沿线gg
’
方向,不影 响船舶能量管理系统的正常运行。反过来,图16是图18中双主控制双网络拓 扑结构的一种减设子控制系统后的重构网络拓扑结构示意图,即在图18的双主 控制双网络拓扑结构中对船舶减设侧推进系统后,形成图16所示的重构网络拓 扑结构。
[0112]
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员 会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进 行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽 然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以 上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例, 而本发明的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1