基于数据建模和多前馈PID的化学加氨自动控制方法与流程
基于数据建模和多前馈pid的化学加氨自动控制方法
技术领域
1.本发明属于机电技术领域,涉及基于数据建模和多前馈pid的化学加氨自动控制方法。
背景技术:
2.目前国内很多机组给水和凝结水加氨控制基本为人工手动控制,一方面缺少在线实时监测仪表或仪表维护不当不能正确监测实时ph值,单纯靠人工做样化验后进行调节,导致加氨过量或不及时、不均匀,且人工工作量非常大,耗时和费力。经调研,周边很多电厂加氨泵无变频控制,加氨手段单一,无闭环控制和自动控制调节措施,这样导致水汽系统安全运行无保证,靠人工做样迟延滞后比较大,加氨量不均匀,对目前运行方式来说,还必须安排人员现场24小时值班,浪费人力物力。
技术实现要素:
3.针对上述问题,本发明的目的在于提供一种基于数据建模和多前馈pid的化学加氨自动控制方法,采用数学建模加多前馈pid算法解决常规凝结水和给水加氨自动大迟延无法投运的难题,实现火电机组凝结水和给水加氨自动控制,实现化学精处理无人值班,提高自动控制程度,保证化学汽水品质的稳定。
4.为了实现上述目的,本发明采用以下技术方案:
5.基于数据建模和多前馈pid的化学加氨自动控制方法,包括:
6.1)通过pid调节器中的比例、积分控制器对给定值和控制值进行粗调;
7.2)将给水流量、ph值和加氨泵的频率数据进行大数据建模,作为第一条前馈f(x1);
8.3)通过测量氨水溶液罐的电导率对加氨泵频率进行函数修正,修正函数f(x2)作为该自动调节的第二条前馈修正;
9.4)增加自动调节给定值与过程值偏差纠正的pid调节回路,作为自动调节的第三条前馈f(x3)修正;
10.5)三条前馈同时输出加氨泵的频率,与pid调节器算出的加氨泵频率相加减,最后算出加氨泵的最终频率,通过控制加氨泵的频率,改变加氨泵的出力,从而控制加氨量,实现化学凝结水和给水加氨的自动控制。
11.优选地,步骤2)中,根据给水流量的变化和相应的数据模型得到一个初步的频率给定值,该频率给定值作为主要调节修正值。
12.优选地,上述方法还包括快速反馈校正回路,用于对步骤5)中的反馈量进行校正。
13.更优选地,所述快速反馈校正回路包括来自于反应器出口的快速反馈回路(a值)以及来自于省煤器入口的延迟反馈回路(b值)。
14.更优选地,所述快速反馈校正回路最终反馈信号通过下式计算:
15.c=a*0.7+b*0.3
16.其中,a:快速反馈回路,b:延迟反馈回路,c:最终反馈信号。a、b的系数值可根据现场控制情况进行适当调整,增大a值系数时,调节更快,但精确度稍差,增大b值系数时,调节稍慢,但调节更精确。
17.本发明的有益效果如下:
18.本发明采用数学建模加多前馈pid算法的方式解决了常规凝结水和给水加氨自动大迟延无法投运的难题,实现两台机组凝结水和给水加氨自动控制,实现化学精处理晚上无人值班,提高自动控制程度并保证了化学汽水品质的稳定,能节约人工成本25万/年。同时通过该发明解决了非线性大时滞典型热控控制难题,摸索出一套适用于主机锅炉,脱硝等同样具有控制难题的方法和经验,提高热工人员技能水平和提高整个机组自动化程度。
19.附图发明
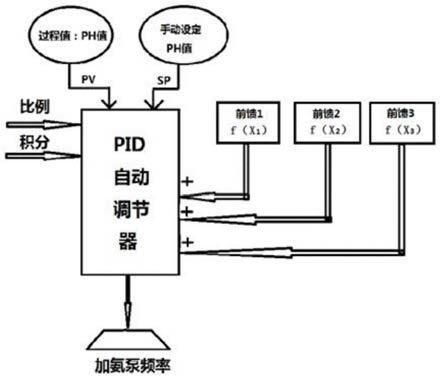
20.图1是本发明给水、凝结水加氨自动控制原理图。
21.图2是本发明实施例中给水ph为9.4,给水流量1300t/h时a加氨泵频率正态分布图。
22.图3是本发明实施例中给水ph为9.4,给水流量1400t/h时a加氨泵频率正态分布图。
23.图4是本发明实施例中给水流量对应加氨泵频率的折线函数图。
24.图5是本发明实施例中氨水电导率对a加氨泵频率修正图。
25.图6是本发明实施例中a加氨泵修正函数图。
26.图7是本发明实施例中线性控制与变结构控制示意图。
27.图8是本发明实施例中两路现场检测回路示意图。
28.图9是本发明实施例中精处理加氨自动优化方案的最终控制流程图。
29.图10是本发明实施例中机组升负荷过程中ph变化界面截图。
具体实施方式
30.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。
31.由于手工调整加氨泵过于繁琐,现考虑对加氨泵的频率实现自动控制,首先从单个水质参数控制入手研究,首选ph值参数控制为研究对象,由于给水和凝结水加氨的中和反应过程中呈现严重非线性,且给水、凝结水加氨管道及在线仪表测量管道过长,具有严重时滞,几乎是最难的单维控制问题之一。申请人通过对这一问题的深入研究,考虑通过大量数据收集,进行数学统计分析建模,得出其中相应的规律,实现对ph值的有效控制,从而为非线性、纯滞后、时变系统的控制提供一定的思路。
32.进而,为实现两台机组凝结水和给水加氨精准自动控制,本发明采用数学建模加多前馈pid方式,解决常规凝结水和给水加氨自动延迟大、无法投运的难题。该自动调节首先通过pid调节器中的比例、积分进行粗调,然后利用大数据收集,进行数学统计分析建模,得出三条前馈函数进行修正补偿,分别是f(x1)、f(x2)、f(x3),三个函数关系式同时输出加氨泵的频率,与pid调节算出的加氨泵频率进行相加减,最后算出加氨泵的最终频率,通过控制加氨泵的频率,改变加氨泵的出力,从而控制加氨量,达到自动控制给水、凝结水ph的作用。控制原理如图1所示。
33.实施例
34.1、负荷
‑
凝结水流量
‑
加氨数据模型
35.以1号机组给水加氨为例,首先前馈f(x1)将给水流量、ph值和加氨泵的频率数据进行大数据建模,将其作为多前馈加入到pid自动调节中。针对非线性、纯滞后、时变系统的控制特性,不同机组负荷下的给水流量不尽相同,而给水流量与加氨泵频率大小有正相关性,故存在一定的规律,将其在不同工况下对应的加氨泵出力进行大数据建模,进行数学统计分析,得出不同给水流量下,最适宜ph的自动控制点,并建立起函数关系式。
36.现1号机组给水流量在机组运行中最适宜的ph值为9.2
‑
9.6,这里取最优9.4,在通过近1年内的数据收集整理,得到给水流量在900
‑
2000t/h之间,最合适的加氨泵频率,为方便统计,以每100t/h为一统计点,进行数据统计。本实施例以给水流量1300t/h、1400t/h统计的数据为例,如下表所示:
37.表1.ph为9.4,给水流量1300t/h,对应加氨泵频率
[0038][0039]
根据表中数据,利用数学统计方法,画出a加氨泵频率的正态分布图,如图2所示。
[0040]
从图2中可以看到,当给水ph为9.4,给水流量1300t/h时,加氨泵的频率出现最多的在15.95hz附近,故给水流量1300t/h时,加氨泵频率近似取16hz。
[0041]
同理,当给水ph为9.4,给水流量1400t/h时,统计数据如下表:
[0042]
表2.ph为9.4,给水流量1400t/h,对应加氨泵频率
[0043][0044]
根据表中数据,画出正态分布图,如图3所示。
[0045]
从图3中可以看到,当给水ph为9.4,给水流量1400t/h时,加氨泵的频率出现最多
的在16.8hz附近,故给水流量1400t/h时,加氨泵频率取16.8hz。
[0046]
同理,用该方法统计给水流量800
‑
2000t/h之间的加氨泵频率,得到下表:
[0047]
表3.ph为9.4,给水流量800
‑
2000t/h,对应加氨泵频率
[0048][0049]
根据图表,画出给水流量对应加氨泵频率的折线函数图,如图4所示。
[0050]
f(x1)为给水流量对应加氨泵频率修正函数:
[0051]
f(x1)={(800,10.2),(900,11.4),(1000,12.4),(1100,13.0),(1200,14.5),(1300,16.0),(1400,16.8),(1500,18.2),(1600,20.8),(1700,22.6),(1800,23.4),(1900,25.4),(2000,27.1)};
[0052]
将该折线函数f(x1)作为该自动调节中最主要的一条前馈,起到快速精准调节的作用。当给水流量变化时,根据折线函数中对应加氨泵的频率,加氨泵能够及时的调整出力,提前介入到ph的调整中,不必等ph值变化,再开始调节,该前馈作为解决大滞后,非线性的自动调节,起到关键作用。
[0053]
2、氨液配制浓度和加氨量数据模型
[0054]
考虑到每天氨水溶液罐内的氨水浓度不尽相同,存在一定的偏差,不同的氨水浓度对于给水、凝结水的ph调节存在一定影响,而氨水的浓度与电导率相关,故在a、b氨水溶液罐的底部新增电导率探头,测量氨水溶液罐的导电度。将新增氨水溶液罐的电导率对加氨泵频率进行函数修正,f(x2)为氨水电导率对应加氨泵频率修正函数:
[0055]
f(x2)={(80,3),(85,2),(90,1),(95,0),(100,
‑
0.5),(105,
‑
1.5),(110,
‑
2)};
[0056]
修正函数f(x2)作为该自动调节的第二条前馈,当氨水溶液罐的电导率越高,则相应减少加氨泵的频率,当氨水溶液罐的电导率越低,则增加加氨泵的频率。通过氨水电导率对加氨泵频率的影响进行大数据收集,建立以下图表:
[0057]
表4.氨水电导率对a加氨泵频率修正
[0058][0059]
根据图表,画出折线函数图,如图5所示。
[0060]
通过该函数f(x2)作为加氨自动调节的第二条前馈,该前馈作为不同的氨液浓度,对加氨泵频率进行实时修正,能够起到精准调节的作用。
[0061]
3、模型与实际偏离的偏差修正回路
[0062]
最后第三条前馈新增自动调节给定值与过程值偏差的调节回路,作为给水pid自动调节的前馈f(x3),该前馈为精细调整,目的是为了让给水ph值能够更加接近设定ph值。当实际给水ph值离设定值越远时,该前馈f(x3)对加氨泵的频率调节越大,当实际ph值离设定值越近,该前馈f(x3)对加氨泵的频率调节越小,通过数据模型建立,可以得到如图6所示的折线函数图。通过修正可以保证实际值和设定值偏差为“0”,如图7所示。
[0063]
f(x3)为设定值与反馈值偏差对应加氨泵频率修正函数:
[0064]
f(x3)={(
‑
0.2,
‑
3),(
‑
0.1,
‑
1.8),(0,0),(0.1,1.4),(0.2,4)};
[0065]
将该前馈函数f(x3)作为给水加氨自动的第三条前馈,再加上前两条前馈函数f(x1)、f(x2)得到a加氨泵的输出频率,再加上给水加氨pid自动调节输出的频率,得到a加氨泵最终的输出频率。
[0066]
4、快速反馈校正回路
[0067]
本发明还包括两路现场检测回路,如图8所示,一路是来自于反应器出口,对加氨量反应快的快速反馈回路(a),另一路是来自于省煤器入口,对加氨量反应慢的延迟反馈回路(b),进而,最终反馈信号(c)按照c=a*0.7+b*0.3对反馈量进行校正,保证最终调节偏差小,减少了反馈的延迟环节。最后形成的整个控制回路如图9所示。
[0068]
按照该控制方法,机组升负荷过程中,给水ph实际在9.3
‑
9.4之间波动,满足机组要求,如图10所示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1