一种基于总线技术的积木舵机控制系统及其控制方法与流程
1.本发明涉及控制技术领域,具体涉及一种基于总线技术的积木舵机控制系统及其控制方法。
背景技术:
2.目前,总线舵机使用的主流的总线有s-wire单总线,uart异步总线两种;而s-wire单总线和uart异步总线两种总线通信应用协议都有一定适用范围。由于舵机设备都是资源受限型的,即只有少量的内存空间和有限的计算能力,而一些复杂的协议应用在舵机设备上就显得过于庞大而不适用。
3.在传统的s-wire单总线舵机中,每个总线上的舵机都是串接在一个信号线上的,信号线上的数据对每个舵机均可见,这种方式资源结构简单、成本低廉但是速度低,当主机与从机发生数据交互时,其他串接在主机上的舵机需要等待,这就对舵机的实时性产生了影响。在uart异步总线舵机中,每个总线上的舵机都相当与一个数据收发器使用的是发送方发出数据后,不等接收方发回响应,接着发送下个数据包的通讯方式,这种情况下虽然通信速度极大的提高了但是数据的可靠性不能得到很好的保证因此在实际使用中容易因为数据堵塞或者失效造成舵机的动作不规整,这为用户的使用带来了不便。
技术实现要素:
4.本发明的目的在于针对现有技术的缺陷和不足,提供一种基于总线技术的积木舵机控制系统及其控制方法,它通过串行总线方式将各舵机和主控连接起来,其具有硬件资源占用少,舵机控制精度高和数据传输可靠性高等特点。
5.为实现上述目的,本发明采用以下技术方案是:它包含舵机模块主体1、舵机驱动机构和主控模块,所述舵机模块主体1包括中框101及与所述中框101两侧可拆卸连接的前盖102和后盖103,所述舵机模块主体1为矩形块状结构,所述舵机模块主体1设有首尾依次连接的第一连接面11、第二连接面12、第三连接面13及第四连接面14,第一连接面11、第二连接面12、第三连接面13及第四连接面14均为矩形结构且与两个正方形端面组成舵机模块主体1,所述第一连接面11设有第一插销孔111、第二插销孔112及舵机信号输入接口113,所述第二连接面12设有第一转轴孔,所述第三连接面13设有与所述第一插销孔111对称设置且结构相同的第三插销孔131、与所述第二插销孔112对称设置且结构相同的第四插销孔132及与所述舵机信号输入接口113对称设置的舵机信号输出接口133,所述第一插销孔111的深度大于所述第二插销孔112的深度,所述第四连接面14设有第二转轴孔,第一插销孔111与第三插销孔131结构相同且对称设置并且深度大于结构相同且对称设置的第二插销孔112及第四插销孔132,所述舵机驱动机构包括舵机驱动电路板、驱动电机21、传动齿轮组22及十字转轴23,所述驱动电机21、舵机信号输入接口113及舵机信号输出接口133均与所述舵机驱动电路板电性连接,所述十字转轴23通过所述传动齿轮组22与所述驱动电机21连接,所述十字转轴23包括安装在所述第一转轴孔内的第一连接端231及安装在所述第二转
轴孔内的第二连接端232,所述第一连接端231及第二连接端232均设有十字连接孔233,所述的舵机驱动电路板包含舵机mcu、舵机同步时钟模块和舵机通信接口,所述的舵机通信接口连接舵机信号输入接口113和舵机信号输出接口133,所述的舵机信号输入接口113和舵机信号输出接口133为type-c接口,所述的type-c接口用于串接不同的舵机,所述的主控模块包含主控mcu、主控同步时钟模块和主控通信接口,所述的主控模块通过type-c接口与舵机连接,所述的舵机模块与舵机模块之间和舵机模块与主控模块之间通过总线协议通信,所述的总线协议映射在type-c接口上。
6.所述的总线协议与type-c接口上的连接方法为,主控通信接口中的tx端连接type-c接口的rx端,主控通信接口中的rx端连接type-c接口的tx端,主控通信接口中的cts端连接type-c接口的rts端,主控通信接口中的rts端连接type-c接口的cts端,所述的舵机模块与舵机模块之间通信的连接方法为,所述的舵机与type-c接口上的连接方法为,舵机通信接口tx端连接type-c接口的tx端,机通信接口rx端连接type-c接口的rx端,机通信接口cts端连接type-c接口的cts端,机通信接口rts端连接type-c接口的rts端。
7.所述的一种基于总线技术的舵机控制方法,包含以下步骤:
8.1)将主控模块设置为主从工作模式,并对总线上的每个舵机设置唯一的地址编号;
9.2)根据舵机配置的地址编号,主控模块读取每个舵机对应的位置信息;
10.3)主控模块通过总线将带地址信息的位置指令按照统一的通讯协议格式发送给舵机;
11.4)舵机在总线上接收到与自身地址匹配的位置指令后,舵机将调整至指定的位置。
12.本发明的工作原理:本发明通过将舵机设置于积木内,舵机与主控模块之间采用总线协议进行通信,其舵机所在的积木两侧设置type-c接口,通过将总线协议映射在type-c接口上,使主控模块或者舵机与舵机之间通过type-c接口相连接,当舵机与舵机之间或者主控模块与舵机之间有数据通过总线协议收发时,将触发主控模块mcu识别数据。在整个运行系统中,主控模块做为主机,各个舵机作为从机,各个舵机都有自身唯一的地址信息,舵机通过总线将自身的位置信息发送至主控模块,同时主控模块通过总线以广播的形式发送包含从机地址的信息,当舵机接收到与自身地址匹配的信息时,将依据接收到的指令,对其位置做出相关调整。
13.采用上述技术方案后,本发明有益效果为:本发明将舵机之间和舵机与主控之间采用总线的控制方式,一方面舵机之间采用的串联方式,极大的简化了系统接线的复杂度,另一方面使主控对舵机控制精度更高,同时主控可方便的实时监控各个舵机的相关信息,使舵机得到有效的保护。
附图说明
14.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
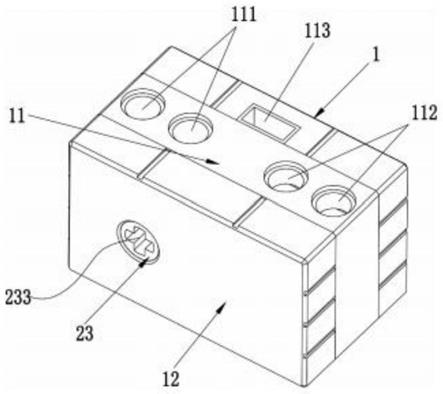
15.图1是本发明的结构示意图。
16.图2是图1的另一角度的结构示意图;
17.图3是图1的分解结构示意图。
18.图4是本发明的设备连接示意图。
19.图5是本发明中主控通信接口、type-c接口和舵机通信接口的通信连接示意图。
20.附图标记说明:舵机模块主体1、中框101、前盖102、后盖103、第一连接面11、第一插销孔111、第二插销孔112、舵机信号输入接口113、第二连接面12、第三连接面13、第三插销孔131、第四插销孔132、舵机信号输出接口133、第四连接面14、驱动电机21、传动齿轮组22、十字转轴23、第一连接端231、第二连接端232、十字连接孔233。
具体实施方式
21.参看图1-图5所示,本具体实施方式采用的技术方案是:它包含舵机模块主体1、舵机驱动机构和主控模块,所述舵机模块主体1包括中框101及与所述中框101两侧可拆卸连接的前盖102和后盖103,所述舵机模块主体1为矩形块状结构,所述舵机模块主体1设有首尾依次连接的第一连接面11、第二连接面12、第三连接面13及第四连接面14,第一连接面11、第二连接面12、第三连接面13及第四连接面14均为矩形结构且与两个正方形端面组成舵机模块主体1,所述第一连接面11设有第一插销孔111、第二插销孔112及舵机信号输入接口113,所述第二连接面12设有第一转轴孔,所述第三连接面13设有与所述第一插销孔111对称设置且结构相同的第三插销孔131、与所述第二插销孔112对称设置且结构相同的第四插销孔132及与所述舵机信号输入接口113对称设置的舵机信号输出接口133,所述第一插销孔111的深度大于所述第二插销孔112的深度,所述第四连接面14设有第二转轴孔,第一插销孔111与第三插销孔131结构相同且对称设置并且深度大于结构相同且对称设置的第二插销孔112及第四插销孔132,所述舵机驱动机构包括舵机驱动电路板、驱动电机21、传动齿轮组22及十字转轴23,所述驱动电机21、舵机信号输入接口113及舵机信号输出接口133均与所述舵机驱动电路板电性连接,所述十字转轴23通过所述传动齿轮组22与所述驱动电机21连接,所述十字转轴23包括安装在所述第一转轴孔内的第一连接端231及安装在所述第二转轴孔内的第二连接端232,所述第一连接端231及第二连接端232均设有十字连接孔233,所述的舵机驱动电路板包含舵机mcu、舵机同步时钟模块和舵机通信接口,所述的舵机通信接口连接舵机信号输入接口113和舵机信号输出接口133,所述的舵机信号输入接口113和舵机信号输出接口133为type-c接口,所述的type-c接口用于串接不同的舵机,所述的主控模块包含主控mcu、主控同步时钟模块和主控通信接口,所述的主控模块通过type-c接口与舵机连接,所述的舵机模块与舵机模块之间和舵机模块与主控模块之间通过总线协议通信,所述的总线协议映射在type-c接口上,所述的总线协议采用usart通用同步异步收发总线协议,采用全双工工作模式。
22.所述的总线协议与type-c接口上的连接方法为,主控通信接口中的tx端连接type-c接口的rx端,主控通信接口中的rx端连接type-c接口的tx端,主控通信接口中的cts端连接type-c接口的rts端,主控通信接口中的rts端连接type-c接口的cts端,所述的舵机模块与舵机模块之间通信的连接方法为,所述的舵机与type-c接口上的连接方法为,舵机通信接口tx端连接type-c接口的tx端,机通信接口rx端连接type-c接口的rx端,机通信接
口cts端连接type-c接口的cts端,机通信接口rts端连接type-c接口的rts端,使总线上的舵机或者主控发出数据后,等接收方发回响应以后才发下一个数据包,这就保证了数据能安全可靠的传输到下一级的舵机。
23.所述的一种基于总线技术的舵机控制方法,包含以下步骤:
24.1)在初始化时将主控模块设置为主从工作模式,并对总线上的每个舵机设置唯一的地址编号;
25.2)根据舵机配置的地址编号,主控模块读取每个舵机对应的位置信息;
26.3)主控模块通过总线首先发送地址信息指令,其地址信息指令中的数据位的最高位为1时,表示该命令为地址指令,该指令包含了舵机地址信息,用于寻找相应舵机,主机发送完地址命令后,发送数据信息指令,其数据信息指令中的数据位的最高位为0,表示该命令为数据信息指令,该指令包含了舵机对应的位置信息,上述数据帧中的地址和数据命令字字节时间间隔无限制,当地址命令字字节串行发送完毕即可发送数据命令。
27.4)舵机在总线上接收到与自身地址匹配的位置指令后,舵机在总线上发送一个收到指令的信息给主控,表示已接收完数据,同时舵机将根据数据指令调整至指定的位置。
28.本发明通过将舵机设置于积木内,舵机与主控模块之间采用通用同步异步收发总线协议进行通信,其舵机所在的积木两侧设置type-c接口,通过将总线协议映射在type-c接口上,使主控模块或者舵机与舵机之间通过type-c接口相连接,当舵机与舵机之间或者主控模块与舵机之间有数据通过总线协议收发时,将触发主控模块mcu识别数据。在整个运行系统中,主控模块做为主机,各个舵机作为从机,各个舵机都有自身唯一的地址信息,舵机通过总线将自身的位置信息发送至主控模块,同时主控模块通过总线以广播的形式发送包含从机地址的信息,当舵机接收到与自身地址匹配的信息时,将依据接收到的指令,对其位置做出相关调整。
29.以上所述,仅用以说明本发明的技术方案而非限制,本领域普通技术人员对本发明的技术方案所做的其它修改或者等同替换,只要不脱离本发明技术方案的精神和范围,均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1