一种无人机自动驾驶仪系统的制作方法
1.本发明涉及无人机自动驾驶技术领域,具体为一种无人机自动驾驶仪系统。
背景技术:
2.随着航空技术的发展,无人机日益广泛地应用于军事和民用领域,与大型无人机相比,小型无人机具有成本低、研制周期短和机动灵活等特点,使得小型无人机在侦察、监视、攻击以及编队组网等对成本和体积敏感的应用领域有着明显的优势,自动驾驶仪是无人机的核心部分,执行飞行导航、控制和任务管理等功能,小型无人机的性能需求以及对体积、重量方面的限制,对自动驾驶仪的设计提出了更高的要求,使其必须向着高精度和小型化的方向发展。
3.无人机自动驾驶仪是按技术要求自动控制飞行器轨迹的调节设备,其作用主要是保持无人机姿态和辅助驾驶员操纵无人机,它将与其他导航设备配合完成规定的飞行任务,无人机自动驾驶仪要求体积小重量轻,但是又要保证结构的刚度和强度以保证测量单元的动态测量精度和稳定性,现有技术中体积小的传感器往往会降低测量精度,因此高精度无人机自动驾驶仪实现小体积的高集成度成为难点。
4.随着无人机应用范围的扩大且任务更加复杂,传统无人机驾驶仪控制系统采用的封闭式设计方式,针对具体型号的无人机,将软件与硬件紧密耦合,已经无法适应当今时代的需求,所以需要设计一种具有标准化、模块化以及开发周期短、易于修改及重构的无人机自动驾驶仪系统。
技术实现要素:
5.(一)解决的技术问题
6.针对现有技术的不足,本发明提供了一种无人机自动驾驶仪系统,解决了现有较小无人机自动驾驶仪往往会降低测量精度,并且采用封闭式控制系统的设计方式无法适应当今时代需求的问题。
7.(二)技术方案
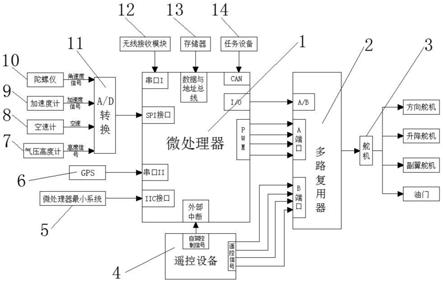
8.为实现以上目的,本发明通过以下技术方案予以实现:一种无人机自动驾驶仪系统,包括微处理器、多路复用器、舵机、遥控设备、最小系统、gps接收器、气压高度计、空速计、加速度计、陀螺仪、无线接收模块、外扩存储器和任务设备,所述微处理器通过i/o接口和pwm接口分别与多路复用器上的a/b接口和a端口相连接,所述多路复用器与舵机进行连接,所述微处理器通过外部中断信号与遥控设备上的自驾控制信号相连接,所述微处理器通过iic接口与最小系统进行连接,所述微处理器通过串口ii与gps接收器相连接,所述微处理器通过串口i与无线接收模块相连接,所述微处理器通过数据与地址总线与外扩存储器相连接,所述微处理器通过任务设备接口can与外部任务设备进行连接。
9.优选的,该无人机自动驾驶仪系统的控制过程如下:
10.s1.通过任务管理进行无人机的航迹规划;
11.s2.根据航迹规划进行无人机的航迹控制;
12.s3.在无人机进行航迹飞行时进行姿态控制,由舵机、无人机和传感器构成的内回路进行控制,内回路的角速率信号由陀螺仪提供,姿态反馈信号由综合加速度计和陀螺仪的信息通过滤波算法得到;
13.s4.由外回路控制无人机的位置和航向信息,并且位置和航向信息由gps接收器提供;
14.通过外回路和内回路的结合控制,从而完成对无人机姿态、位置的稳定控制,使无人机按预定航迹飞行。
15.优选的,所述舵机包括作为飞行机构的方向翼、升降翼、副翼和油门。
16.优选的,所述气压高度计、空速计、加速度计和陀螺仪均通过a/d转换器与微处理器上的spi接口连接,气压高度计用于测量高度信号,空速计用于测量空速信号,加速度计用于测量加速度信号,陀螺仪用于测量角速度信号。
17.优选的,所述遥控设备通过遥控信号与多路复用器上的b端口进行信号交流,遥控设备主要用于飞机的起飞与降落时的控制,并外保证飞机飞行途中出现安全事故无法自动飞行的情况下能够安全的返航,确保无人机的飞行安全,以防意外发生。
18.优选的,所述微处理器主要采用avr单片机或arm处理器,avr单片机产品成本低、上手快、故障率低、设计简单,arm处理器有着丰富的片内资源、较高的运算速度、高效的运算能力和强大的接口。
19.优选的,所述加速度计采用高性能的三轴加速度计,型号为美国模拟器件公司生产的adxl330。
20.优选的,所述陀螺仪采用单轴角速度传感器,型号为美国模拟器件公司表面微机械工艺制造的功能完整、低成本的adxrs610。
21.(三)有益效果
22.本发明提供了一种无人机自动驾驶仪系统。具备以下有益效果:
23.1、本发明提供了一种无人机自动驾驶仪系统,通过该系统的各个组成部分之间共同完成无人机的控制过程,可以改善无人机的飞行品质,即保证存在干扰的情况下,维持飞机的航迹稳定和姿态稳定,同时按照由地面控制站发出的任务指令或预先设定好的任务改变飞机的飞行状态,保证无人机稳定飞行,完成飞机的自动驾驶操作。
24.2、本发明提供了一种无人机自动驾驶仪系统,可以对无人机进行飞行管理,使用各种传感器采集无人机的飞行姿态信息、进行姿态信息的解算、控制信号的发送、遥测信号的传送、紧急情况的处理、无人机机载设备的运行与控制,使无人机能够进行正常的飞行和任务的执行。
25.3、本发明提供了一种无人机自动驾驶仪系统,该系统在满足无人机驾驶仪测量精度的前提下,实现了无人机驾驶仪的小体积高集成度化设置,使无人机向着小型化和轻型化方向发展。
26.4、本发明提供了一种无人机自动驾驶仪系统,该驾驶仪系统采用开放式的设计方式,具有标准化、模块化以及控制系统开发周期短、易于修改及重构的特点,非常适应当今时代的需求,值得推广。
附图说明
27.图1为本发明提出的无人机自动驾驶仪系统总体结构示意图;
28.图2为本发明提出的无人机自动驾驶仪系统控制过程示意图。
29.其中,1、微处理器;2、多路复用器;3、舵机;4、遥控设备;5、最小系统;6、gps接收器;7、气压高度计;8、空速计;9、加速度计;10、陀螺仪;11、a/d转换器;12、无线接收模块;13、外扩存储器;14、任务设备。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.实施例:
32.如图1-2所示,本发明实施例提供一种无人机自动驾驶仪系统,包括微处理器1、多路复用器2、舵机3、遥控设备4、最小系统5、gps接收器6、气压高度计7、空速计8、加速度计9、陀螺仪10、无线接收模块12、外扩存储器13和任务设备14,微处理器1通过i/o接口和pwm接口分别与多路复用器2上的a/b接口和a端口相连接,多路复用器2与舵机3进行连接,微处理器1通过外部中断信号与遥控设备4上的自驾控制信号相连接,微处理器1通过iic接口与最小系统5进行连接,微处理器1通过串口ii与gps接收器6相连接,微处理器1通过串口i与无线接收模块12相连接,微处理器1通过数据与地址总线与外扩存储器13相连接,微处理器1通过任务设备接口can与外部任务设备14进行连接。
33.该无人机自动驾驶仪系统的控制过程如下:
34.s1.通过任务管理进行无人机的航迹规划;
35.s2.根据航迹规划进行无人机的航迹控制;
36.s3.在无人机进行航迹飞行时进行姿态控制,由舵机3、无人机和传感器构成的内回路进行控制,内回路的角速率信号由陀螺仪10提供,姿态反馈信号由综合加速度计9和陀螺仪10的信息通过滤波算法得到;
37.s4.由外回路控制无人机的位置和航向信息,并且位置和航向信息由gps接收器6提供;
38.通过外回路和内回路的结合控制,从而完成对无人机姿态、位置的稳定控制,使无人机按预定航迹飞行。
39.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1