一种基于NBIoT的天线姿态检测方法及终端与流程
一种基于nbiot的天线姿态检测方法及终端
技术领域
1.本发明涉及天线检测领域,尤其涉及一种基于nbiot的天线姿态检测方法及终端。
背景技术:
2.基站中天线的物理参数有俯仰角、横滚角、方位角、天线挂高、位置等,环境参数有温度,湿度等。这些参数对基站的电磁覆盖有着决定性的影响作用。
3.天线参数的正确性在网络规划和网络优化中有重要的意义,故如何进行天线参数的测量和获取能够得到正确性高的天线参数是一个重要命题;现有通常是通过测量人员使用罗盘,读取数据得到通讯基站天线的方位角,俯仰角,横滚角等数据,此种测量方式是人为确定角度信息,有工程人员的技巧及人工测量主观因素的存在,使得测量角度存在误差且可能造成较大的误差;并且工程人员测量需要上塔,每次上塔测量都存在一定的危险且上塔的费用偏高,人工上塔也无法达到实时监测天线移动姿态的目的;
4.在专利号为cn201810158277的专利文件中,提供了一种姿态监测方法,通过天线姿态跟踪仪跟踪天线姿态,通过定位系统定位天线位置、通过电子罗盘测量方位角及通过陀螺仪获取俯仰角,其中,方位角通过倾斜补偿算法进行校正补偿;但因为磁力计采用压租式,电容式工作方式,在周围环境温度变化比较大的情况,电阻的阻值有一定的变化,就会导致出来的磁场原数据有一定的变化,磁场数据没有经过温度补偿,会出现在没有移动的情况下,冬夏由于温差过大,出现角度偏移过大的问题,出现监测角度异常。
技术实现要素:
5.本发明所要解决的技术问题是:提供一种基于nbiot的天线姿态检测方法及终端,提高天线姿态测量的准确率,实现对天线姿态的实施检测和上报。
6.为了解决上述技术问题,本发明采用的一种技术方案为:
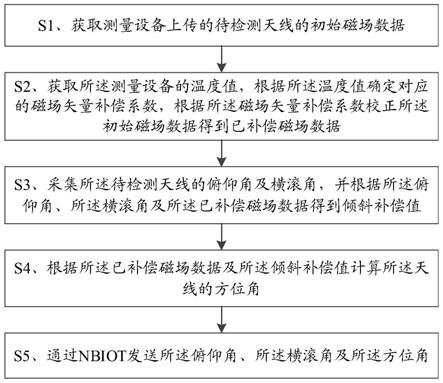
7.一种基于nbiot的天线姿态检测方法,包括步骤:
8.s1、获取测量设备上传的待检测天线的初始磁场数据;
9.s2、获取所述测量设备的温度值,根据所述温度值确定对应的磁场矢量补偿系数,根据所述磁场矢量补偿系数校正所述初始磁场数据得到已补偿磁场数据;
10.s3、采集所述待检测天线的俯仰角及横滚角,并根据所述俯仰角、所述横滚角及所述已补偿磁场数据得到倾斜补偿值;
11.s4、根据所述已补偿磁场数据及所述倾斜补偿值计算所述天线的方位角;
12.s5、通过nbiot发送所述俯仰角、所述横滚角及所述方位角。
13.为了解决上述技术问题,本发明采用的另一种技术方案为:
14.一种基于nbiot的天线姿态检测终端,包括存储器、处理器及存储在存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
15.s1、获取测量设备上传的待检测天线的初始磁场数据;
16.s2、获取所述测量设备的温度值,根据所述温度值确定对应的磁场矢量补偿系数,
根据所述磁场矢量补偿系数校正所述初始磁场数据得到已补偿磁场数据;
17.s3、采集所述待检测天线的俯仰角及横滚角,并根据所述俯仰角、所述横滚角及所述已补偿磁场数据得到倾斜补偿值;
18.s4、根据所述已补偿磁场数据及所述倾斜补偿值计算所述天线的方位角;
19.s5、通过nbiot发送所述俯仰角、所述横滚角及所述方位角。
20.本发明的有益效果在于:获取测量设备上传的初始磁场数据之后,再获取测量设备的温度值,根据温度值确定对应的磁场矢量补偿系数校正初始磁场数据得到已补偿磁场数据,通过已补偿磁场数据校正测量所得到的天线的俯仰角及横滚角,得到倾斜补偿值,最后根据倾斜补偿值和已补偿磁场数据得到方位角并将俯仰角、横滚角及方位角都通过nbiot发送,在计算天线姿态时考虑到温度对所读取的数据的影响并进行校正,并且能够对俯仰角、横滚角及方位角进行共同校正,提高了所获取到的天线姿态数据的准确性,nbiot网络耗能小,能够长时间工作,在满足数据上报需要的同时免于频繁更换电池维护,提升了可用性。
附图说明
21.图1为本发明实施例的一种基于nbiot的天线姿态检测方法的步骤流程图;
22.图2为本发明实施例的一种基于nbiot的天线姿态检测终端的结构示意图;
23.图3为本发明实施例的俯仰角及横滚角的测量过程示意图;
24.图4为本发明实施例的方位角的获取过程示意图;
25.图5为本发明实施例的通过nbiot网络上报数据示意图;
26.图6为本发明实施例的测量设备工作流程示意图;
27.图7为本发明实施例的测量设备续航判断流程示意图;
28.标号说明:
29.1、一种基于nbiot的天线姿态检测终端;2、处理器;3、存储器。
具体实施方式
30.为详细说明本发明的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
31.请参照图1及图3至图7,一种基于nbiot的天线姿态检测方法,包括步骤:
32.s1、获取测量设备上传的待检测天线的初始磁场数据;
33.s2、获取所述测量设备的温度值,根据所述温度值确定对应的磁场矢量补偿系数,根据所述磁场矢量补偿系数校正所述初始磁场数据得到已补偿磁场数据;
34.s3、采集所述待检测天线的俯仰角及横滚角,并根据所述俯仰角、所述横滚角及所述已补偿磁场数据得到倾斜补偿值;
35.s4、根据所述已补偿磁场数据及所述倾斜补偿值计算所述天线的方位角;
36.s5、通过nbiot发送所述俯仰角、所述横滚角及所述方位角。
37.从上述描述可知,本发明的有益效果在于:获取测量设备上传的初始磁场数据之后,再获取测量设备的温度值,根据温度值确定对应的磁场矢量补偿系数校正初始磁场数据得到已补偿磁场数据,通过已补偿磁场数据校正测量所得到的天线的俯仰角及横滚角,
得到倾斜补偿值,最后根据倾斜补偿值和已补偿磁场数据得到方位角并将俯仰角、横滚角及方位角都通过nbiot发送,在计算天线姿态时考虑到温度对所读取的数据的影响并进行校正,并且能够对俯仰角、横滚角及方位角进行共同校正,提高了所获取到的天线姿态数据的准确性,nbiot网络耗能小,能够长时间工作,在满足数据上报需要的同时免于频繁更换电池维护,提升了可用性。
38.进一步的,所述s1具体为:
39.获取所述测量设备上传的加速度及测量磁场数据;
40.通过椭球最小二乘拟合算法拟合所述加速度及所述测量磁场数据,得到初始磁场数据。
41.由上述描述可知,通过椭球最小二乘拟合算法计算出初始磁场数据,不以单次的测量数据为计算标准而是取多次测量结果的拟合值,提高了磁场矢量补偿系数的准确度。
42.进一步的,所述s2具体为:
43.通过六轴传感器获取所述天线的角速度及所述天线的角度,所述六轴传感器包括三轴陀螺仪及三轴加速度计;
44.将所述角速度及所述角度通过卡尔曼滤波得到四元数;
45.根据所述四元数得到所述俯仰角及所述横滚角。
46.由上述描述可知,通过六轴传感器获取天线的角速度及角度,最终通过卡尔曼滤波器得到四元数,根据四元数计算出俯仰角及横滚角,实现对天线俯仰角及横滚角的测量。
47.进一步的,所述s2具体为:
48.x=x(源)-(tmp_count-tmp_base)
×
mag[tmp_count];
[0049]
其中,x为所述已补偿磁场数据,x(源)为通过所述测量设备中芯片所获取的所述初始磁场数据,tmp_count为所述芯片的温度值,tmp_base为所述芯片的基准工作温度值,mag[tmp_count]为tmp_count对应的所述磁场矢量补偿系数;
[0050]
其中,x包括mag.x、mag.y及mag.z;mag.x为所述已补偿磁场数据在x轴方向上的值,mag.y为所述已补偿磁场数据在y轴方向上的值,mag.z为所述已补偿磁场数据在z轴方向上的值。
[0051]
由上述描述可知,通过温度获取相应的磁场矢量补偿系数对初始磁场数据进行补偿得到已补偿磁场数据,并且所得到的已补偿磁场数据包括x轴、y轴及z轴三个方向上的值,使得后续使用已补偿磁场数据所求得的响应值能够更加精确。
[0052]
进一步的,所述s3具体为:
[0053]
hx=(mag.x
×
cos(pitcha))+(mag.z
×
sin(pitcha));
[0054]
hy=mag.y
×
cos(rolla)+mag.x
×
sin(pitcha)
×
sin(rolla)-mag.z
×
cos(pitcha)
×
sin(rolla);
[0055]
其中,pitcha为所述俯仰角,rolla为所述横滚角,hx及hy为所述倾斜补偿值。
[0056]
由上述描述可知,通过已补偿磁场数据对俯仰角及横滚角进行校正得到倾斜补偿值,通过校正后的倾斜补偿值计算方位角,提高了最终计算出的方位角的准确度。
[0057]
请参照图2,一种基于nbiot的天线姿态检测终端,包括存储器、处理器及存储在存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
[0058]
s1、获取测量设备上传的待检测天线的初始磁场数据;
[0059]
s2、获取所述测量设备的温度值,根据所述温度值确定对应的磁场矢量补偿系数,根据所述磁场矢量补偿系数校正所述初始磁场数据得到已补偿磁场数据;
[0060]
s3、采集所述待检测天线的俯仰角及横滚角,并根据所述俯仰角、所述横滚角及所述已补偿磁场数据得到倾斜补偿值;
[0061]
s4、根据所述已补偿磁场数据及所述倾斜补偿值计算所述天线的方位角;
[0062]
s5、通过nbiot发送所述俯仰角、所述横滚角及所述方位角。
[0063]
本发明的有益效果在于:获取测量设备上传的初始磁场数据之后,再获取测量设备的温度值,根据温度值确定对应的磁场矢量补偿系数校正初始磁场数据得到已补偿磁场数据,通过已补偿磁场数据校正测量所得到的天线的俯仰角及横滚角,得到倾斜补偿值,最后根据倾斜补偿值和已补偿磁场数据得到方位角并将俯仰角、横滚角及方位角都通过nbiot发送,在计算天线姿态时考虑到温度对所读取的数据的影响并进行校正,并且能够对俯仰角、横滚角及方位角进行共同校正,提高了所获取到的天线姿态数据的准确性,nbiot网络耗能小,能够长时间工作,在满足数据上报需要的同时免于频繁更换电池维护,提升了可用性。
[0064]
进一步的,所述s1具体为:
[0065]
获取所述测量设备上传的加速度及测量磁场数据;
[0066]
通过椭球最小二乘拟合算法拟合所述加速度及所述测量磁场数据,得到初始磁场数据。
[0067]
由上述描述可知,通过椭球最小二乘拟合算法计算出初始磁场数据,不以单次的测量数据为计算标准而是取多次测量结果的拟合值,提高了磁场矢量补偿系数的准确度。
[0068]
进一步的,所述s2具体为:
[0069]
通过六轴传感器获取所述天线的角速度及所述天线的角度,所述六轴传感器包括三轴陀螺仪及三轴加速度计;
[0070]
将所述角速度及所述角度通过卡尔曼滤波得到四元数;
[0071]
根据所述四元数得到所述俯仰角及所述横滚角。
[0072]
由上述描述可知,通过六轴传感器获取天线的角速度及角度,最终通过卡尔曼滤波器得到四元数,根据四元数计算出俯仰角及横滚角,实现对天线俯仰角及横滚角的测量。
[0073]
进一步的,所述s2具体为:
[0074]
x=x(源)-(tmp_count-tmp_base)
×
mag[tmp_count];
[0075]
其中,x为所述已补偿磁场数据,x(源)为通过所述测量设备中芯片所获取的所述初始磁场数据,tmp_count为所述芯片的温度值,tmp_base为所述芯片的基准工作温度值,mag[tmp_count]为tmp_count对应的所述磁场矢量补偿系数;
[0076]
其中,x包括mag.x、mag.y及mag.z;mag.x为所述已补偿磁场数据在x轴方向上的值,mag.y为所述已补偿磁场数据在y轴方向上的值,mag.z为所述已补偿磁场数据在z轴方向上的值。
[0077]
由上述描述可知,通过温度获取相应的磁场矢量补偿系数对初始磁场数据进行补偿得到已补偿磁场数据,并且所得到的已补偿磁场数据包括x轴、y轴及z轴三个方向上的值,使得后续使用已补偿磁场数据所求得的响应值能够更加精确。
[0078]
进一步的,所述s3具体为:
[0079]
hx=(mag.x
×
cos(pitcha))+(mag.z
×
sin(pitcha));
[0080]
hy=mag.y
×
cos(rolla)+mag.x
×
sin(pitcha)
×
sin(rolla)-mag.z
×
cos(pitcha)
×
sin(rolla);
[0081]
其中,pitcha为所述俯仰角,rolla为所述横滚角,hx及hy为所述倾斜补偿值。
[0082]
由上述描述可知,通过已补偿磁场数据对俯仰角及横滚角进行校正得到倾斜补偿值,通过校正后的倾斜补偿值计算方位角,提高了最终计算出的方位角的准确度。
[0083]
请参照图1,本发明的实施例一为:
[0084]
一种基于nbiot的天线姿态检测方法,包括步骤:
[0085]
s1、获取测量设备上传的待检测天线的初始磁场数据;具体为:获取所述测量设备上传的加速度及测量磁场数据;通过椭球最小二乘拟合算法拟合所述加速度及所述测量磁场数据,得到初始磁场数据;
[0086]
具体的,测量设备为磁场监测装置,磁场监测装置安装人员手动或自动(校准工装)分别绕x轴、y轴及z轴平滑运动,在运动过程中多次获取自身的加速度及磁场数据,磁场数据是空间二次曲面的形式的,空间二次曲面的标准表达式是((x-x0)/a)*((x-x0)/a)+((y-y0)/b)*((y-y0)/b)+((z-z0)/c)*((z-z0)/c)=1,将磁场监测装置所得到的数据带入空间二次曲面的标准表达式求得x、y及z,x、y及z的值即为为获取到的磁场数据,通过空间二次曲面算法拟合加速度及磁场数据获得初始磁场数据,表示为空间二次曲面方程(x0,y0,z0,a,b,c),其中(x0,y0,z0)为磁场中心,(a,b,c)为椭球方程的参数;
[0087]
在一种可选的实施方式中,所述空间二次曲面算法为椭球最小二乘拟合算法;
[0088]
s2、获取所述测量设备的温度值,根据所述温度值确定对应的磁场矢量补偿系数(磁场矢量补偿系数是在实验室通过高低温实验获取到的不同的温度对磁场数据的影响所计算出),根据所述磁场矢量补偿系数校正所述初始磁场数据得到已补偿磁场数据;
[0089]
s3、采集所述待检测天线的俯仰角及横滚角,并根据所述俯仰角、所述横滚角及所述已补偿磁场数据得到倾斜补偿值;
[0090]
请参照图3,采集俯仰角及横滚角的过程具体为:通过六轴传感器获取所述天线的角速度及所述天线的角度,所述六轴传感器包括三轴陀螺仪及三轴加速度计;通过三轴陀螺仪获取天线的角速度,通过三轴加速度计获取天线的角度,将所述角速度及所述角度通过卡尔曼滤波得到四元数(卡尔曼滤波利用六轴芯片自带的dmp库进行解算得到);根据所述四元数得到所述俯仰角及所述横滚角;
[0091]
s4、根据所述已补偿磁场数据及所述倾斜补偿值计算所述天线的方位角;
[0092]
s5、通过nbiot(nb-iot,narrow band internet of things,窄带物联网)发送所述俯仰角、所述横滚角及所述方位角。
[0093]
请参照图3及图4,本发明的实施例二为:
[0094]
一种基于nbiot的天线姿态检测方法,其与实施例一的不同之处在于,s2具体为:
[0095]
x=x(源)-(tmp_count-tmp_base)
×
mag[tmp_count];
[0096]
其中,x为所述已补偿磁场数据,x(源)为通过所述测量设备中芯片所获取的所述初始磁场数据,tmp_count为所述芯片的温度值,tmp_base为所述芯片的基准工作温度值,mag[tmp_count]为tmp_count对应的所述磁场矢量补偿系数;
[0097]
其中,x包括mag.x、mag.y及mag.z;mag.x为所述已补偿磁场数据在x轴方向上的值,mag.y为所述已补偿磁场数据在y轴方向上的值,mag.z为所述已补偿磁场数据在z轴方向上的值;
[0098]
s3具体为:
[0099]
hx=(mag.x
×
cos(pitcha))+(mag.z
×
sin(pitcha));
[0100]
hy=mag.y
×
cos(rolla)+mag.x
×
sin(pitcha)
×
sin(rolla)-mag.z
×
cos(pitcha)
×
sin(rolla);
[0101]
其中,pitcha为所述俯仰角,rolla为所述横滚角,hx及hy为所述倾斜补偿值;
[0102]
s4具体为:
[0103]
请参照图4,根据空间二次方程(x0,y0,z0,a,b,c)换算补偿后的磁场x轴、y轴及z轴的数据:x=x1-x0,y=y1-y0,z=z1-z0;其中x1、y1及z1分别为当前测量设备所获取到的三轴磁场数据),再通过hx及hy得到实际的磁场x轴、y轴及z轴的数据,最后计算出对应的方位角。
[0104]
请参照图5至图7本发明的实施例三为:
[0105]
将上述的一种基于nbiot的天线姿态检测方法应用于实际场景中:
[0106]
请参照图5,设置一姿态设备用于检测天线姿态,一nbiot平台用于数据上报及一web平台用于数据管理;其中姿态设备采用十轴模块,包括三轴陀螺仪、三轴加速度计、三轴加速度计、三轴磁力计及一个温度传感器,能够测量俯仰角、横滚角、方位角、温度及gnss(global navigation satellite system,全球导航卫星系统)数据,其中,gnss主要获取gps的精度,维度,以及海拔高度,确认姿态监测设备的安装位置及挂高度;
[0107]
请参照图6,上报平台为nbiot平台,姿态设备安装在天线上,以监测天线的姿态数据,在一种可选的实施方式中,nbiot平台为电信的nbiot平台,需要账号密码登录查看数据;
[0108]
nbiot平台将数据上报至微信公众号及web平台,管理人员可通过微信公众号或web平台下发工作模式及报警参数至nbiot平台,由nbiot平台转发给姿态设备,实现对天线姿态数据的实时检测;
[0109]
管理人员可根据天气、环境等情况通过web平台设置检测频率,如在天气情况较差、天线姿态有较大概率变动时时提高检测频率,在天气情况较好时降低检测频率以降低功耗;nbiot平台及姿态设备可采用锂电池与太阳能电池结合的方式进行供电,姿态设备根据检测频率进行实时检测及异常报警,在正常工作模式下根据预设的上报时间进行上报;
[0110]
请参照图6,为首次安装姿态设备的过程图,在正常情况下,姿态设备处于休眠状态,通过轻触按键唤醒姿态设备,启动上报采集数据,通过算法输出姿态数据:俯仰角,横滚角,方位角数据信息上报至nbiot平台;微信客户端或者web管理平台推送安装测试模式至姿态设备,姿态设备收到工作模式后判断是否为安装测试模式,安装测试模式中,每间隔20秒进行一次姿态数据采集并上报至nbiot平台;现场安装工人通过微信客户端查看姿态数据,当前天线姿态的方位角数据信息,在当前天线姿态的方位角达到合适值时(合适值为后台安装数据库中所设置的天线基准值),下发正常工作模式及检测频率信息至姿态设备,姿态设备收到下推的工作模式为非调试模式时,上报gps数据,经度,纬度,海拔高度等信息;姿态设备存储下发的告警参数信息,及下次上报平台时间,姿态检测异常频率信息;姿态检
测异常频率及下次上报时间可以根据天气,环境等进行设置频率的高低,来有效降低系统功耗;检测频率越高,下次上报时间越短系统功耗越高,电池的寿命就会越短。本系统可以实时设置检测频率及上报频率,有效降低系统的功耗。在台风天等天线姿态容易变动的情况下,检测频率可以设置高点;存储完姿态数据信息后姿态设备及nbiot平台都进入休眠;
[0111]
姿态监测频率可以在微信客户端上设置好后,在姿态设备下次心跳上报成功后,下推至姿态设备,姿态设备根据收到的监测频率数据按照新的频率信息进行检测;采用间断性的设置检测频率及上报时间,在非检测时间及非上报时间进行休眠可以有效降低系统的功耗,延长电池的使用寿命。
[0112]
请参照图7,为正常工作模式下的系统工作流程图,在姿态设备正常工作时,处于休眠状态,系统功耗极低,可以达到10ua(微安),通过mcu(microcontroller unit,微控制单元)自带的rtc闹钟功能实现唤醒;唤醒后采集模块数据并输出姿态角度,判断自身电池电量是否超过下发的告警参数信息,未超过门限值(门限值为后台服务器数据库中设置的告警参数值),获取系统rtc时间,与平台上次下发的下次上报时间进行比较,判断是否大于平台设置值,若未大于下发值,根据检查频率设置下次唤醒rtc唤醒时间;若系统时间大于下发值,则进行将姿态数据信息及系统电量等信息上报至nbiot平台;
[0113]
nbiot平台收到数据后给与接收成功应答,并下推工作模式、下次上报时间及系统异常检测频率至姿态设备;姿态设备设置rtc闹钟时间后进入休眠;
[0114]
若nbiot获取到的姿态数据大于报警参数门限值,姿态终端上报姿态数据及gps相关信息至nbiot平台,nbiot平台给与应答,并下推工作模式、报警参数信息及下次上报时间至姿态设备。姿态设备存储下次唤醒时间,系统唤醒功能由内部rtc闹钟时钟决定,设置完唤醒时间后姿态设备进入休眠。
[0115]
请参照图2,本发明的实施例四为:
[0116]
一种基于nbiot的天线姿态检测终端1,包括处理器2、存储器3及存储在存储器3上并可在所述处理器2上运行的计算机程序,所述处理器2执行所述计算机程序时实现实施例一、实施例二或实施例三中的各个步骤。
[0117]
综上所述,本发明提供了一种基于nbiot的天线姿态检测方法及终端,通过设置温度传感器,在获取磁场数据的同时获取温度,根据温度值对磁场数据进行校正,通过校正后的磁场数据进行俯仰角、横滚角及方位角的计算,在计算方位角时,还对俯仰角及横滚角进行倾斜补偿,因磁场数据的检测受温度的影响较大,通过温度校正磁场能够使得角度的计算更加精确,最终所获取的天线姿态数据也更加精确;将获取到的姿态数据通过nbiot网络进行上传,nbiot网络能耗低、单个电池的工作时长长,配合锂电池+太阳能电池的电池设置,无需工作人员频繁更换电池就能长时间工作,并且在非上报时间使测量设备进行休眠,进一步节约了能耗;配合web平台或微信端(如微信公众号)能够实现对测量频率及上报频率的调整,根据不同的天气情况设置不同值,如在天气恶劣时提高测量频率,能够更加灵活地对天线的姿态进行监控并且能够进一步实现功耗的降低,实现对天线姿态的实施检测和上报。
[0118]
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1