整体返航路径规划方法、规划系统、储存介质及无人机与流程
1.本发明属于无人机控制技术领域,尤其涉及一种整体返航路径规划方法、 规划系统、储存介质及无人机。
背景技术:
2.目前,使用若干架次的无人机编队,在空中组成特定队形进行飞行,并利 用其搭载的载荷完成特定功能。无人机编队在执行任务过程中,由于目标发生 变化等原因,可能发生需要整体返航的情况,此时应该立即调整编队的飞行状 态,以最快的速度返回起降基地。无人机编队被召回时,每一架编队中的无人 机个体的飞行状态和飞行性能均正常,所以整体返航对于编队系统来讲属于实 时任务注入。但是目前暂无解决无人机编队整体返航状态下的路径规划,以供 编队实现安全有效的整体返航动作的方案,无法实现返航路径规划。
3.通过上述分析,现有技术存在的问题及缺陷为:目前暂无解决无人机编队 整体返航状态下的路径规划,以供编队实现安全有效的整体返航动作的方案, 无法实现返航路径规划。
4.解决以上问题及缺陷的难度为:
5.无人机编队的飞行状态复杂多变,方法需要具有快速实时规划的特点,以 满足实时性需求。同时需要特定算法满足无人机编队的安全间距需求,以实现 有效返航。
6.解决以上问题及缺陷的意义为:
7.可以实现在任意时刻召回无人机编队,实现返航路径规划,提高无人机编 队应用实用性。
技术实现要素:
8.针对现有技术存在的问题,本发明提供了一种整体返航路径规划方法、规 划系统、储存介质及无人机。
9.本发明是这样实现的,一种无人机编队整体返航路径规划方法,包括以下 步骤:
10.步骤一,收到整体返航召回指令;
11.步骤二,判断无人机编队目前状态和空间位置,即当前编队中所有无人机 的位置m
t
=[m
t1
,m
t2
,m
t3
,...,m
tn
];
[0012]
步骤三,确定返航位置,即起飞位置s=[s1,s2,s3,...,s
n
];
[0013]
步骤四,建立返航模型,计算整体返航路径;
[0014]
步骤五,将路径发送至无人机编队,进行返航飞行。
[0015]
进一步,步骤四中,所述建立返航模型,包括:
[0016]
建立空间直角坐标系w;w的三个轴x
w
,y
w
,z
w
分别指向东,南和天空;空间 中的无人机位置表示为(x,y,z),单位为m;
[0017]
基于建立的空间直角坐标系,建立无人机编队位置模型、无人机编队路径 模型、
无人机返航路径模型。
[0018]
进一步,所述建立无人机编队位置模型,包括:
[0019]
假设共有n架无人机,则无人机编队的初始队形位置表示为:
[0020]
s=[s1,s2,s3,...,s
n
];
[0021]
无人机编队的终点队形位置表示为:
[0022]
e=[e1,e2,e3,...,e
n
];
[0023]
无人机编队在某一时刻t的队形位置表示为:
[0024]
m
t
=[m
t1
,m
t2
,m
t3
,...,m
tn
];
[0025]
其中,s
n
,e
n
,m
tn
均为w中的位置点;
[0026]
由此,无人机编队的目标为:队形从s变为e。
[0027]
进一步,所述建立无人机编队路径模型,包括:
[0028]
假设在整个队形变化中,共规划了p个路径点,则过程中的无人机编队的所 有路径可表示为:
[0029][0030]
进一步,所述建立无人机返航路径模型,包括:
[0031]
当无人机编队需要整体返航时,则需要从当前状态规划所有无人机的返航 路径;假如在时刻t开始规划动态返航路径,无人机编队返航路径长度为q,返 航路径可表示为b;
[0032][0033]
进一步,步骤四中,所述计算整体返航路径,包括:
[0034]
(1)确定无人机编队当前位置b
i
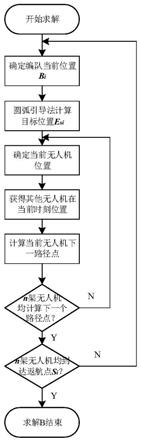
;
[0035]
(2)计算当前无人机圆弧引导目标点位置es
i
;
[0036]
(3)计算下一路径点;
[0037]
(4)重复步骤(2)
‑
步骤(3),直到编队中n个无人机均完成计算下一路 径点;
[0038]
(5)重复步骤(1)
‑
步骤(4),直到编队无人机均到达返航位置b
q
=s。
[0039]
本发明的另一目的在于提供一种应用所述无人机编队整体返航路径规划方 法的无人机编队整体返航路径规划系统,所述无人机编队整体返航路径规划系 统接收路径计算结果,自动按照规划结果进行飞行。
[0040]
进一步,所述无人机编队整体返航路径规划系统包括:
[0041]
指令接收模块,用于进行整体返航召回指令的接收;
[0042]
编队状态确定模块,用于判断无人机编队目前状态;
[0043]
无人机定位模块,用于对无人机当前的空间位置进行确定;
[0044]
返航位置确定模块,用于确定无人机的返航位置;
[0045]
返航模型构建模块,用于建立无人机返航模型;
[0046]
返航路径规划模块,用于进行整体返航路径的规划;
[0047]
信号发送模块,用于将规划的整体返航路径发送至无人机编队,进行返航 飞行。
[0048]
本发明的另一目的在于提供一种计算机可读存储介质,储存有指令,当所 述指令在计算机上运行时,使得计算机执行所述无人机编队整体返航路径规划 方法。
[0049]
本发明的另一目的在于提供一种计算机设备,所述计算机设备包括存储器 和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行 时,使得所述处理器执行如下步骤:
[0050]
收到整体返航召回指令;
[0051]
判断无人机编队目前状态和空间位置;
[0052]
确定返航位置;
[0053]
建立返航模型,计算整体返航路径;
[0054]
将路径发送至无人机编队,进行返航飞行。
[0055]
本发明的另一目的在于提供一种计算机可读存储介质,储存有指令,当所 述指令在计算机上运行时,使得计算机执行所述无人机编队整体返航路径规划 方法。
[0056]
本发明的另一目的在于提一种无人机,所述无人机执行如所述无人机编队 整体返航路径规划方法。
[0057]
结合上述的所有技术方案,本发明所具备的优点及积极效果为:本发明提 供的无人机编队整体返航路径规划方法,可以实现动态状态下的无人机编队整 体返航路径规划,具有安全可靠,防止碰撞,策略最优的技术特点。具有较高 的实用意义。
[0058]
本发明能够实现无人机编队整体的动态返航路径规划,具有较高的实时性 和安全性。
[0059]
本发明可以进行最优的动态返航路径规划,规划结果符合无人机性能需求, 具有较高的实用性。
附图说明
[0060]
为了更清楚地说明本申请实施例的技术方案,下面将对本申请实施例中所 需要使用的附图做简单的介绍,显而易见地,下面所描述的附图仅仅是本申请 的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下 还可以根据这些附图获得其他的附图。
[0061]
图1是本发明实施例提供的无人机编队整体返航路径规划方法原理图。
[0062]
图2是本发明实施例提供的无人机编队整体返航路径规划方法流程图。
[0063]
图3是本发明实施例提供的整体返航路径规划模型示意图。
[0064]
图4是本发明实施例提供的整体返航路程示意图。
[0065]
图5是本发明实施例提供的计算整体返航路径流程图。
[0066]
图6是本发明实施例提供的无人机编队整体返航路径规划系统结构框图;
[0067]
图6中:1、指令接收模块;2、编队状态确定模块;3、无人机定位模块; 4、返航位置确定模块;5、返航模型构建模块;6、返航路径规划模块;7、信 号发送模块。
[0068]
图7是本发明实施例提供的整体返航路程示意图。
[0069]
图8是本发明实施例提供的整体返航路程示意图。
具体实施方式
[0070]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例, 对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以 解释本发明,并不用于限定本发明。
[0071]
针对现有技术存在的问题,本发明提供了一种无人机编队整体返航路径规 划方法,下面结合附图对本发明作详细的描述。
[0072]
如图1
‑
2所示,本发明实施例提供的无人机编队整体返航路径规划方法包括 以下步骤:
[0073]
s101,收到整体返航召回指令;
[0074]
s102,判断无人机编队目前状态和空间位置;
[0075]
s103,确定返航位置;
[0076]
s104,建立返航模型,计算整体返航路径;
[0077]
s105,将路径发送至无人机编队,进行返航飞行。
[0078]
步骤s104中,本发明实施例提供的建立返航模型,包括:
[0079]
建立空间直角坐标系w;w的三个轴x
w
,y
w
,z
w
分别指向东,南和天空;空间 中的无人机位置表示为(x,y,z),单位为m;
[0080]
基于建立的空间直角坐标系,建立无人机编队位置模型、无人机编队路径 模型、无人机返航路径模型。
[0081]
如图3
‑
4所示,本发明实施例提供的建立无人机编队位置模型,包括:
[0082]
假设共有n架无人机,则无人机编队的初始队形位置表示为:
[0083]
s=[s1,s2,s3,...,s
n
];
[0084]
无人机编队的终点队形位置表示为:
[0085]
e=[e1,e2,e3,...,e
n
];
[0086]
无人机编队在某一时刻t的队形位置表示为:
[0087]
m
t
=[m
t1
,m
t2
,m
t3
,...,m
tn
];
[0088]
其中,s
n
,e
n
,m
tn
均为w中的位置点;
[0089]
由此,无人机编队的目标为:队形从s变为e。
[0090]
本发明实施例提供的建立无人机编队路径模型,包括:
[0091]
假设在整个队形变化中,共规划了p个路径点,则过程中的无人机编队的所 有路径可表示为:
[0092][0093]
本发明实施例提供的建立无人机返航路径模型,包括:
[0094]
当无人机编队需要整体返航时,则需要从当前状态规划所有无人机的返航 路径;假如在时刻t开始规划动态返航路径,无人机编队返航路径长度为q,返 航路径可表示为b;
[0095][0096]
如图5所示,步骤s104中,本发明实施例提供的计算整体返航路径,包括:
[0097]
s201,确定无人机编队当前位置;
[0098]
s202,计算当前无人机圆弧引导目标点位置;
[0099]
s203,计算下一路径点;
[0100]
s204,重复步骤s201
‑
步骤s203,直到编队中n个无人机均完成计算下一路 径点;
[0101]
s205,重复步骤s201
‑
步骤s204,直到编队无人机均到达返航位置。
[0102]
本发明实施例提供的无人机编队整体返航路径规划系统接收路径计算结 果,自动按照规划结果进行飞行。
[0103]
如图6所示,本发明实施例提供的无人机编队整体返航路径规划系统包括:
[0104]
指令接收模块1,用于进行整体返航召回指令的接收;
[0105]
编队状态确定模块2,用于判断无人机编队目前状态;
[0106]
无人机定位模块3,用于对无人机当前的空间位置进行确定;
[0107]
返航位置确定模块4,用于确定无人机的返航位置;
[0108]
返航模型构建模块5,用于建立无人机返航模型;
[0109]
返航路径规划模块6,用于进行整体返航路径的规划;
[0110]
信号发送模块7,用于将规划的整体返航路径发送至无人机编队,进行返航 飞行。
[0111]
下面结合实施例对本发明作进一步描述。
[0112]
实施例1:
[0113]
一种无人机编队整体返航路径规划方法,包括以下具体步骤:
[0114]
步骤1:收到整体返航召回指令;
[0115]
步骤2:判断无人机编队目前状态和空间位置;
[0116]
步骤3:确定返航位置;
[0117]
步骤4:计算整体返航路径;
[0118]
步骤5:将路径发送至无人机编队,进行返航飞行。
[0119]
实施例2:
[0120]
返航模型的建立包括:
[0121]
建立空间直角坐标系w。w的三个轴x
w
,y
w
,z
w
分别指向东,南和天空;空间 中的无人机位置表示为(x,y,z),单位为m。
[0122]
假设共有n架无人机,则无人机编队的初始队形位置表示为:
[0123]
s=[s1,s2,s3,...,s
n
];
[0124]
无人机编队的终点队形位置表示为:
[0125]
e=[e1,e2,e3,...,e
n
];
[0126]
无人机编队在某一时刻t的队形位置表示为
[0127]
m
t
=[m
t1
,m
t2
,m
t3
,...,m
tn
];
[0128]
其中,s
n
,e
n
,m
tn
均为w中的位置点。
[0129]
由此,无人机编队的目标为:队形从s变为e。
[0130]
假设在整个队形变化中,共规划了p个路径点。则过程中的无人机编队的所 有路径可表示为:
[0131][0132]
当无人机编队需要整体返航时,则需要从当前状态规划所有无人机的返航 路径。假如在时刻t开始规划动态返航路径,无人机编队返航路径长度为q,返 航路径可表示为b。
[0133][0134]
实施例3:
[0135]
路径计算方法为:
[0136]
(1)确定无人机编队当前位置b
i
;
[0137]
(2)计算当前无人机圆弧引导目标点位置es
i
;
[0138]
(3)计算下一路径点;
[0139]
(4)重复(2
‑
3),直到编队中n个无人机均完成计算下一路径点;
[0140]
(5)重复(1
‑
4),直到编队无人机均到达返航位置b
q
=s。
[0141]
实施例4:
[0142]
将路径计算结果发送至无人机编队整体返航路径规划,系统将自动按照规 划结果进行飞行。
[0143]
实施例5:
[0144]
对所有无人机编队发送返航指令,无人机编队的返航掉头及仿真规划路径 响应如图4,图7是本发明实施例提供的整体返航路程计算结果。图8是本发明实 施例提供的整体返航路程计算结果。
[0145]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于 此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡在本发明 的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本发明的 保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1