基于5G通讯和VR双环视技术的平地机远程遥控系统及方法与流程
基于5g通讯和vr双环视技术的平地机远程遥控系统及方法
技术领域
[0001]
本发明涉及一种基于5g通讯和vr双环视技术的平地机远程遥控系统,属于远程遥控工程机械领域。
背景技术:
[0002]
部分工程机械车辆作业环境恶劣,操作人员现场操作需要忍受颠簸、高温、辐射甚至有生命危险。
[0003]
采用4g的远程遥控延时比较大,不能够实时控制车辆。如果仅使用大屏显示远端视频数据,则没有身临其境的操控体验感。
技术实现要素:
[0004]
针对上述现有技术存在的问题,本发明提供一种基于5g通讯和vr双环视技术的平地机远程遥控系统,有效规避了普通vr带来的视觉盲区,从驾驶室内部视角查看的同时,还可以在vr头显中实时展示车身全景影像和车辆工况参数;可以通过手柄按键切换vr头显中显示内容;利用5g通讯,可以有效降低图像传输和工况数据传输的时延。
[0005]
本发明按以下技术方案实现:基于5g通讯和vr双环视技术的平地机远程遥控系统,包括:摄像头,将采集视频信号通过5g网络传输到远端操控台的工控机中;车辆can总线,其上的工况数据通过车载网关转换成网络数据后,通过5g网络传输到远端操控台的工控机中;vr头显,工控机上的数据处理系统将视频数据和工况参数合并处理后显示在vr头显中;车身状态检测器,车辆端控制器将车身状态检测器采集的数据经过车载网关转成网络数据后,利用5g网络传输到远端操控台的工控机并控制座椅动作;车辆操控器,操控台端控制器采集车辆操控器信号,通过操控台车载网关转换成网络数据后传送到车辆端控制器,从而控制平地机作业。
[0006]
进一步,所述摄像头包括安装在平地机车身周围的摄像头和驾驶室内的360度环视摄像头。
[0007]
进一步,所述vr头显包含内环视、外环视和车辆工况参数显示的功能,通过手柄按键切换vr头显中显示内容,能够内环视、外环视、工况参数同时显示,也能够切换单独显示。
[0008]
进一步,所述车身状态检测器包括振动传感器、倾角传感器;车辆端控制器将振动传感器和倾角传感器采集的数据经过车载网关转成网络数据后,利用5g网络传输到远端操控台的工控机并控制座椅倾斜和震动。
[0009]
进一步,所述车辆操控器包括手柄按键和脚踏板;操控台端控制器采集手柄按键和脚踏板信号,通过操控台车载网关转换成网络数据后传送到车辆端控制器,从而控制平地机作业。
[0010]
进一步,在平地机中设有车载5g路由器,在操控台上设有操控台5g路由器,以此实现5g网络传输路线。
[0011]
基于5g通讯和vr双环视技术的平地机远程遥控方法,包括以下步骤:1)利用5g路由器、车载网关建立基于5g的通讯链路;2)摄像头采集到视频信号通过5g网络发送到操控台的数据处理系统;3)车辆can总线上的工况数据通过车载网关转换成网络数据,利用5g网络发往操控台的数据处理系统;4)操控台的数据处理系统将图像数据和车辆工况数据合并处理后,显示到vr头显;5)车辆端控制器采集到的震动和角度信号,通过车载网关发送到操控台的数据处理系统,数据处理系统控制座椅的倾斜和震动;6)操控台端控制器采集手柄按键和脚踏板信号,通过车载网关转发成网络数据传送到车辆端控制器,用来控制平地机的移动和工作。
[0012]
进一步,所述vr头显包含内环视、外环视和车辆工况参数显示的功能,即能够内环视、外环视、工况参数同时显示,又能够切换单独显示,内环视是从驾驶员角度通过转动头部来实现360度环视,外环视是显示车辆360度全景影像;工控机上的数据处理系统将车身外部视频图像拼接成360度全景影像,再根据手柄设置的vr头显当前显示模式,将车身全景影像和内部环视视频图像以及工况参数合并处理,显示在vr头显中。
[0013]
本发明有益效果:本发明利用vr双环视功能来实现远程遥控,不仅可以利用vr内环视功能在头显实时展示驾驶员角度动态影像,还可以在vr头显中显示平地机整车的全景影像,有效解决了因平地机车身较长,普通vr功能无法随时了解车身周边路况带来的操作风险。配合振动传感器、倾角传感器数据控制座椅的振动和倾斜,带来一种身临其境的操控体验感;同时,利用5g网络减少通讯时延。
附图说明
[0014]
附图作为本发明的一部分,用来提供对本发明的进一步的理解,本发明的示意性实施例及其说明用于解释本发明,但不构成对本发明的不当限定。显然,下面描述中的附图仅仅是一些实施例,对于本领域普通技术人员来说,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图。
[0015]
在附图中:图1为本发明的工作流程示意图;图2为本发明的系统框图。
[0016]
需要说明的是,这些附图和文字描述并不旨在以任何方式限制本发明的构思范围,而是通过参考特定实施例为本领域技术人员说明本发明的概念。
具体实施方式
[0017]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对实施例中的技术方案进行清楚、完整地描述,以下实施例用于说明本发明,但不用来限制本发明的范围。
[0018]
在本发明的描述中,需要说明的是,术语
ꢀ“
上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0019]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0020]
如图2所示,一种基于5g通讯和vr双环视技术的平地机远程遥控系统,包括摄像头、vr头显、车身状态检测器和车辆操控器;摄像头将采集视频信号通过5g网络传输到远端操控台的工控机中;车辆can总线上的工况数据通过车载网关转换成网络数据后,通过5g网络传输到远端操控台的工控机中;工控机上的数据处理系统将视频数据和工况参数合并处理后显示在vr头显中;车辆端控制器将车身状态检测器采集的数据经过车载网关转成网络数据后,利用5g网络传输到远端操控台的工控机并控制座椅动作;操控台端控制器采集车辆操控器信号,通过操控台车载网关转换成网络数据后传送到车辆端控制器,从而控制平地机作业。
[0021]
作为本发明的优化方法:所述摄像头包括安装在平地机车身周围的摄像头和驾驶室内的360度环视摄像头。
[0022]
作为本发明的优化方法:所述vr头显包含内环视、外环视和车辆工况参数显示的功能,能够内环视、外环视、工况参数同时显示,也能够切换单独显示。工控机上的数据处理系统将车身外部视频图像拼接成360度全景影像,再根据手柄设置的vr头显当前显示模式,将车身全景影像和内部环视视频图像以及工况参数合并处理,显示在vr头显中。
[0023]
具体的优选方案为:所述车身状态检测器包括振动传感器、倾角传感器;车辆端控制器将振动传感器和倾角传感器采集的数据经过车载网关转成网络数据后,利用5g网络传输到远端操控台的工控机并控制座椅倾斜和震动。
[0024]
具体的优选方案为:所述车辆操控器包括手柄按键和脚踏板;操控台端控制器采集手柄按键和脚踏板信号,通过操控台车载网关转换成网络数据后传送到车辆端控制器,从而控制平地机作业。
[0025]
具体的优选方案为:在平地机中设有车载5g路由器,在操控台上设有操控台5g路由器,以此实现5g网络传输路线。
[0026]
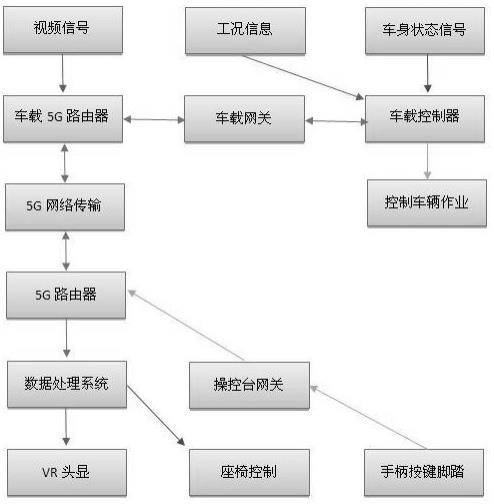
如图1所示,一种基于5g通讯和vr双环视技术的平地机远程遥控方法,包括以下步骤:1)利用5g路由器、车载网关建立基于5g的通讯链路;2)摄像头采集到视频信号通过5g网络发送到操控台的数据处理系统;3)车辆can总线上的工况数据通过车载网关转换成网络数据,利用5g网络发往操控台的数据处理系统;4)操控台的数据处理系统将图像数据和车辆工况数据合并处理后,显示到vr头显;5)车辆端控制器采集到的震动和角度信号,通过车载网关发送到操控台的数据处理系统,数据处理系统控制座椅的倾斜和震动;
6)操控台端控制器采集手柄按键和脚踏板信号,通过车载网关转发成网络数据传送到车辆端控制器,用来控制平地机的移动和工作。
[0027]
需要说明的是,vr头显包含内环视、外环视和车辆工况参数显示的功能,即能够内环视、外环视、工况参数同时显示,又能够切换单独显示,内环视是从驾驶员角度通过转动头部来实现360度环视,外环视是显示车辆360度全景影像;工控机上的数据处理系统将车身外部视频图像拼接成360度全景影像,再根据手柄设置的vr头显当前显示模式,将车身全景影像和内部环视视频图像以及工况参数合并处理,显示在vr头显中。
[0028]
综上,本发明通过vr双环视技术,减少了平地机作业时的视觉盲区,提高了操作的可靠性;通过vr头显中车辆工况数据的实时显示,及时了解平地机当前车况,进一步辅助驾驶作业;利用5g传输数据极大降低了时延,同时采用座椅的模拟动作带来沉浸式体验。
[0029]
在此处所提供的说明书中,说明了大量具体细节。然而,能够理解,本发明的实施例可以在没有这些具体细节的情况下实践。在一些实例中,并未详细示出公知的方法、结构和技术,以便不模糊对本说明书的理解。
[0030]
此外,本领域的技术人员能够理解,尽管在此所述的一些实施例包括其它实施例中所包含的某些特征而不是其它特征,但是不同实施例的特征的组合同样意味着处于本发明的保护范围之内并且形成不同的实施例。例如,在上面的实施例中,本领域技术人员能够根据获知的技术方案和本申请所要解决的技术问题,以组合的方式来使用。
[0031]
以上所述仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专利的技术人员在不脱离本发明技术方案范围内,当可利用上述提示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1