手势控制模块、家用电器和手势控制模块在电器中的应用的制作方法
1.本发明涉及一种手势控制模块、一种具有手势控制模块的家用电器以及一种手势控制模块在家用电器中的应用。
背景技术:
2.在厨房电器或卫生电器上使用手势控制是特别有利的,因为通过非接触式的操作能够保持电器的清洁和卫生。同时,基于非接触式的操作,也能够实现用户的手不被污染。现有技术中的非接触式手势控制模块通常由一个红外接收管和一个红外发射管构成或者由一个红外接收管和多个红外发射管构成。这样的手势控制模块仅能在该红外接收管的区域检测物体接近、停留或大致的经过方向,因而所能实现的手势较为单一,并因此也仅能实现有限的控制功能。而且,这样的手势控制模块无法对家用电器进行精准的非接触式控制。随着家用电器功能的不断丰富,亟须扩大手势控制模块的操作功能。
技术实现要素:
3.本发明的目的在于,提供一种改善的手势控制模块、一种具有手势控制模块的家用电器以及一种手势控制模块在家用电器中的应用。
4.根据本发明的第一方面,规定一种基于红外反射原理的非接触式手势控制模块,其包括:
[0005]-由多个红外发射管和多个红外接收管构成的感应区域,所述红外发射管与红外接收管沿一个延伸方向交替排列;
[0006]-控制电路,用于控制各个红外发射管和各个红外接收管的接通和关断;
[0007]-信号处理器,用于接收和处理所述多个红外接收管产生的信号并且确定物体在所述感应区域上方在所述延伸方向上的坐标位置。
[0008]
按照本发明的手势控制模块能实现非接触式的手势操作。在本发明中,所述多个红外发射管可以是至少三个红外发光二极管。所述多个红外发射管能够发出红外光,所述红外光的波长可以处于770nm至1mm之间。所述红外光在物体、如用户的手接近时能够被反射并被所述红外接收管接收。所述多个红外接收管可以构成为至少三个红外光敏二极管或红外光敏三极管。所述红外发射管与红外接收管沿一个延伸方向交替排列。在此,所述延伸方向为红外发射管与红外接收管的排列方向。通过所述的交替式排列的布置方式,相对于现有技术中的手势操作模块提供了扩大的感应区域或者说可操作位置,进而可检测多样化的手势。。通过交替的排布方式,相邻的红外发射管和红外接收管能够实现相互复用。例如,一个红外接收管既可以接收到在其一侧的红外发射管所发射的、被物体反射的红外光,也可以接收到在其另一侧的红外发射管所发射的被物体反射的红外光。而一个红外发射管所发射的红外光通过物体反射既可以被在其一侧的红外接收管所接收,也可以被在其一侧的红外接收管所接收。由此可降低硬件制造成本。
[0009]
所述控制电路用于控制各个红外发射管和各个红外接收管的接通和关断。特别
是,所述控制电路按照预定的时序对各个红外发射管和红外接收管的状态进行控制。在现有技术中的手势控制模块通常仅包括一个红外接收管,其红外发射管可以一直保持接通。而在按照本发明的手势控制模块中,各个红外发射管所发射的红外光可能同时被多个红外接收管所接收,因此需要管理各个红外发射管和各个红外接收管的接通和关断。
[0010]
所述信号处理器用于接收和处理所述多个红外接收管产生的信号并且确定物体在所述感应区域上方在所述延伸方向上的坐标位置。当物体在感应区域上方运动时,所述信号处理器根据所接收的各个红外接收管的信号、例如通过对所述信号进行比较来判断物体处于其中一个或多个红外接收管上方,从而判断出物体在所述延伸方向上的坐标位置。
[0011]
相对于现有的手势检测模块,基于感应区域的扩大,可操作位置也相应增加,按照本发明能实现对于接近于感应区域的物体的定位,从而通过其确切的位置相应实现多样化的手势及操作功能。
[0012]
在本发明中,例如可以为感应区域内的坐标配设多种不同操作功能。例如将感应区域划分为多个坐标区间,每个坐标区间可代表家用电器的一种功能,由此根据出现物体的坐标位置可以实现所配设的功能。利用本发明的手势感应模块可定位出所接近物体的不同位置,进而实现精确化的非接触控制。此外,通过本发明的手势控制模块,还可以对家用电器的档位进行调节。例如根据坐标将感应区域划分为不同的档位,根据物体的坐标来触发所述家用电器按照不同的档位,从而能够实现对家用电器进行多档位调节。特别是,直接依据所确定的坐标位置实现无级化的调节。无刷电机和变频器越来越多地应用在家用电器领域中,由此也出现无级调节的可能性。通过本发明的手势控制模块的坐标位置的精细定位特别有利地满足无级调节的需求。
[0013]
需要说明的是,本发明的手势控制模块并不是将现有技术中的由一个红外接收管和一个红外发射管构成的或者由一个红外接收管和多个红外发射管构成的模块的简单组合。而是以红外发射管和红外接收管的交替的列状排列方式结合对这些红外管的操控以及所产生信号的处理综合性地、有机地实现手势控制模块的手势识别、特别是对接近于感应区域的物体的定位。而且这样的定位也无法由现有技术的模块的组合实现。一方面各个红外接收管的信号会被来自其他模块的红外光所干扰,从而各个模块的信号相互干扰耦合,从而难以进行手势识别。另一方面出于设计尺寸、空间结构、检测要求或电路布线等原因多个模块也难以紧密地布置在一起。在本发明中多个红外发射管和多个红外接收管共用一个控制电路和一个信号处理器,这也能实现相对于现有技术的硬件成本节省。
[0014]
按照本发明的一种实施方式,所述信号处理器根据由所述红外接收管产生的信号确定物体相对于所述感应区域的法向距离。所述法向距离是指物体与感应区域在垂直于所述红外发射管与红外接收管的延伸方向上的距离、即在高度方向上的距离。在能够确定法向距离的情况下,所述手势控制模块能够识别出物体在法向方向上的运动,从而所述手势控制模块能够识别在法向方向上的手势。
[0015]
按照本发明的一种实施方式,所述感应区域的起始和/或末尾是红外发射管。由此保证每个红外接收管都能有效地接收到红外信号。
[0016]
按照本发明的一种实施方式,所述延伸方向是直线方向、折线方向、平面切线方向或空间切线方向。在此,所述红外发射管与红外接收管可以在平面内沿直线、折线、三角形、正方形、长方形、平行四边形、曲线、圆形、椭圆形、或不规则形状分布,或者可以在空间内沿
曲面、如柱面、球面、椭球面、锥面、双曲面、抛物面或不规则曲面分布。由此可以使得手势控制模块形状跟随待操作表面的几何设计。特别是,所述多个红外发射管和所述多个红外接收管相互间隔开相同距离地设置。
[0017]
按照本发明的一种实施方式,所述控制电路以时分复用的方式控制各个红外发射管和各个红外接收管的接通和关断。通过采用时分复用的控制方式,能够在时间上错开地接通和关断各个红外发射管和各个红外接收管,从而减小多个红外发射管的反射光对红外接收管的干扰,因此能够更好地实现信号的解耦。
[0018]
按照本发明的一种实施方式,所述控制电路通过如下方式控制各个红外发射管和各个红外接收管的接通和关断:
[0019]-同时接通所有红外接收管,而依次接通每个红外发射管;或者
[0020]-依次接通一个或多个红外收发组,每个红外收发组包括相邻的至少一个红外发射管与至少一个红外接收管;或者
[0021]-时间上错开地接通多个不相邻的红外收发组,每个红外收发组包括相邻的至少一个红外发射管与至少一个红外接收管。
[0022]
在同时接通所有红外接收管,而依次接通每个红外发射管的情况下,每个时刻仅一个的红外发射管发射的红外光在被反射后可被红外接收管接收。这样的接通方式能够避免来自多个红外发射管的反射光对各个红外接收管的干扰。也可设想的是,在依次接通每个红外发射管时,仅接通与所述红外发射管邻近的一个或多个红外接收管、例如与所述红外发射管紧邻设置的共两个红外接收管,在此,从一个接通的红外发射管发射的红外光被反射后仅被相邻的红外接收管接收,这减少了信号处理装置要处理的信号量,从而提高数据处理效率。在所述感应区域内依次接通所有红外发射管后,计为一个扫描周期,然后循环多个扫描周期。在一个扫描周期内,每个红外接收管可以产生如下信号时间序列,在所产生信号时间序列中每个时刻都由一个红外发射管发射了红外光。由此信号处理器可以简单地确定接近物体所对应的红外接收管。
[0023]
在一种变型方案中,依次接通一个或多个红外收发组,每个红外收发组包括相邻的至少一个红外发射管与至少一个红外接收管。通过分组地接通各个红外发射管与红外接收管,在每个时刻内,每个红外接收管仅能接收到来自同组的红外发射管的反射信号。因此,降低了信号处理的复杂性,提高计算效率。
[0024]
在另一种变型方案中,时间上错开地接通多个不相邻的红外收发组,每个红外收发组包括相邻的至少一个红外发射管与至少一个红外接收管。该变型方案在感应区域较长的情况下是有利的,因为依次打开每个红外发射管以用于完成一次信号扫描需要耗费较长的时间。因此,如果多个不相邻的红外收发组同时工作,则可以减小扫描时间。
[0025]
按照本发明的一种实施方式,基于所述各个红外接收管产生的信号的幅值和/或斜率和/或相位来确定物体在感应区域上方在所述延伸方向上的坐标位置和/或物体相对于所述感应区域的法向距离。所述信号处理器接收和处理所述多个红外接收管产生的信号时间序列,例如通过比较所述信号的幅值可以确定反射光峰值位置,从而确定存在物体的坐标位置。例如通过计算所述信号的斜率可以确定反射光变化,从而确定物体是处于接近运动还是远离运动。例如通过综合计算所述信号的幅值、斜率和相位的变化可以确定存在物体的更精确的坐标位置。在此,通过确定物体在感应区域上方在所述延伸方向上的坐标
位置与物体相对于所述感应区域的法向距离、特别是所述坐标位置和所述法向距离的变化,可以判断物体在感应区域上方的动态变化,从而实现对于多种手势的识别。
[0026]
以基于幅值来判断物体的位置为例,在每个扫描周期内,所述手势控制模块可以通过比较所接收的信号时间序列得到幅值最大的信号。因此,可以认为物体处于产生幅值最大的信号的红外发射管附近。通过循环多个扫描周期,能够不断更新物体所在的位置。在多个扫描周期内,如果识别出幅值最大的信号出现在不同的信号接收管上,则可以确定物体正在感应区域上方沿所述延伸方向平移运动。而如果识别出幅值一直相对最大但不断变化的信号仅出现在同一个或同一些信号接收管上,则可以确定物体仅沿法向方向运动。在此基础上,如果在所述信号时间序列上,信号的幅值逐渐增大,则可以识别出物体相对于所述感应区域的法向距离逐渐减小。如果信号的幅值逐渐减小,则可以识别出物体相对于所述感应区域的法向距离逐渐增加。
[0027]
按照本发明的一种实施方式,将所述感应区域划分为多个操作子区域,如果在所述一个或多个操作子区域内检测到物体,则识别出针对所述操作子区域的手势。通过这种方式,将所述感应区域划分为多个操作子区域,如果在多个扫描周期之内,仅在所述一个或多个操作子区域内检测到物体,则可以认为物体对相应的操作子区域进行操作,从而仅识别出在所述操作子区域内的手势,而不考虑其它操作子区域。从而一方面可以减小数据处理量,另一方面能够实现在感应区域内设置的不同功能之间的相互干扰。
[0028]
按照本发明的一种实施方式,在所述检测区域周围设置有一个或多个可见光发光装置。所述可见光发光装置优选通过一个或多个在可见光范围内的可见光发光二极管和优选相应的光学器件如导光体、导光腔、可见光散射层等实现。
[0029]
按照本发明的一种实施方式,所述可见光发光装置指示物体当前的位置、已输入的手势或操作提示。通过这样的方式为用户提供所需的指示和反馈。在所述一个或多个可见光发光装置划分成与感应区域上的操作子区域相对应的子区域的情况下,如果检测到物体处于一个或多个操作子区域上方,则改变在该操作子区域中的可见光发光装置的发光颜色或发光亮度,从而可以向用户反馈接收到了操作并且对应地示出物体当前的位置。此外,如果所述手势控制模块识别出手势,则所述可见光发光装置可以借助于与手势对应的图标指示已输入的手势。此外,所述可见光发光装置在运行时还可以提示用户当前可操作的功能。例如以流水灯的形式提示用户进行左挥或右挥。还可以闪烁方式对已经识别的手势进行灯光反馈,例如闪烁两次向使用者表示检测到手势。
[0030]
按照本发明的一种实施方式,所述手势控制模块能识别以下手势中的至少一种或其组合:
[0031]-滑移定位;
[0032]-挥动;
[0033]-悬停;
[0034]-点击;
[0035]-轻拍。
[0036]
所述手势控制模块根据物体在多个扫描周期内位置的变化来识别对应的手势。其中,所述滑移定位手势代表物体、例如手从所述手势控制模块的感应区域中的任一位置开始向左或向右(或者说向上或向下)运动,利用所述手势控制模块可以确定物体在所述延伸
方向上的坐标位置和/或物体相对于所述感应区域的法向距离。所述挥动手势包括左挥或右挥,其代表物体从感应区域的一端移动到感应区域的另一端。特别是,如果所述手势控制模块检测到物体从感应区域的起始端沿所述延伸方向移动到末尾端或从所述末尾端移动到起始端,则识别出挥动手势。悬停手势代表物体停在所述感应区域上方一定距离范围的远处一定时间。因此,如果所述手势控制模块在一段时间内没有检测到物体在所述延伸方向上的坐标位置的变化和物体相对于所述感应区域的法向距离的变化,则识别出悬停手势。所述点击手势代表已经处于一定距离范围内的物体进一步接近感应区域。因此,如果所述手势控制模块识别出物体在感应区域的任一位置上相对于所述感应区域的法向距离进一步减小,则识别出所述点击手势。所述轻拍手势代表物体以一定的速度从一定距离范围的远处沿法向逐渐靠近手势控制模块并停在距离手势控制模块表面的一定距离范围内一定时间,后又以一定的速度沿法向方向逐渐远离手势控制模块。因此,如果所述手势控制模块识别出物体在感应区域的任一位置上存在相对于所述感应区域的法向距离逐渐减小并保持所述一定的法向距离一端时间,后又识别出物体在感应区域的任一位置上存在相对于所述感应区域的法向距离逐渐增加,则识别出轻拍手势。
[0037]
上述手势检测可以通过多种参数来综合判断,以提高可靠性。比如,点击手势中加入“以一定的速度从一定距离范围的远处进一步靠近”中对进一步靠近的判断,可以有效增加可靠性,尤其是排除油烟的干扰。而结合“以一定的速度从一定距离范围的远处逐渐靠近”和“并停在距离手势控制模块表面的一定距离范围内一定时间”判断,可以有效地滤除人的头部造成的干扰。再比如,在轻拍手势中,“以一定的速度从一定距离范围的远处逐渐靠近”,“停在距离手势控制模块表面的一定距离范围内一定时间”和“再以一定的速度逐渐远离手势控制模块”对于这些内容的判断可以非常可靠的滤除油烟、环境光变化、人头部靠近或移动造成的干扰。
[0038]
根据本发明的第二方面,规定一种家用电器,所述家用电器包括一个或多个上述手势控制模块。所述家用电器为油烟机、冰箱、烤箱、食物料理机、洗衣机、智能水龙头或智能马桶。通过本发明的非接触式的手势控制模块可以在无需手接触的情况下进行对于上述家用电器的操作,并且能够实现对家用电器实现多样化的手势及操作功能、特别是精细调节和因此无级调速。
[0039]
按照本发明的第三方面,规定一种上述手势控制模块在家用电器中的应用,所述手势控制模块用于控制家用电器的以下功能中的至少一种:
[0040]-接通或关断所述家用电器;
[0041]-调大/调小档位;
[0042]-切换操作模式;
[0043]-对档位的精细调节;
[0044]-特定模式;
[0045]-接通或关断照明灯。
[0046]
上述功能是家用电器的常用功能。其中,所述特定模式是无级调速模式。也可能的是,利用所述手势控制模块控制家用电器的其它功能。
[0047]
按照本发明的一种实施方式,在所述应用中:
[0048]-利用悬停或点击实现接通或关断所述家用电器;
[0049]-利用挥动手势实现调大/调小档位和/或切换操作模式;
[0050]-利用悬停或点击手势实现确认;
[0051]-利用轻拍手势实现开关功能。
[0052]
其中,利用滑动移位手势可以检测手在感应区域上方在所述延伸方向上的坐标位置和/或手相对于所述感应区域的法向距离,从而根据手所在的坐标触发感应区域上对应的功能。利用悬停或点击手势实现确认,所述确认可以对所触发的模式的确认或对档位的精细调节的确认。利用轻拍手势实现开关功能,所述开关功能可以是开灯或关灯、开门或关门、开阀或关阀的功能。
[0053]
按照本发明的一种实施方式,在所述家用电器为油烟机的情况下,
[0054]-利用滑移定位手势来触发相应的功能;
[0055]-利用点击或悬停选中所触发的功能;
[0056]-利用挥动手势切换到特定模式中;
[0057]-利用滑移定位手势实现对油烟机档位的精细调节。
[0058]
例如,在油烟机的待机状态下,将所述感应区域划分为常用的如下多个功能:开机/关机;开灯/关灯;一档风速(最低风速);二挡风速(中等风速);三档风速(最高风速);特定模式(即无级调速)。如果用户期望进入特定模式,则用户首先利用滑动移位手势将手移动到所期望的功能、即特定模式对应的感应区域上。随后,利用点击或悬停手势作为对特定模式的确认。紧接着,利用挥动手势将油烟机切换到特定模式中。在特定模式中,将所述感应区域根据物体在所述延伸方向上的坐标精细地划分为多个子区域,用户利用滑动定位手势可实现对油烟机档位的精细调节。
[0059]
在本发明中,对于一个方面描述的功能、效果或优势以相应的方式适用于本发明的其他方面,并且反之亦然。
附图说明
[0060]
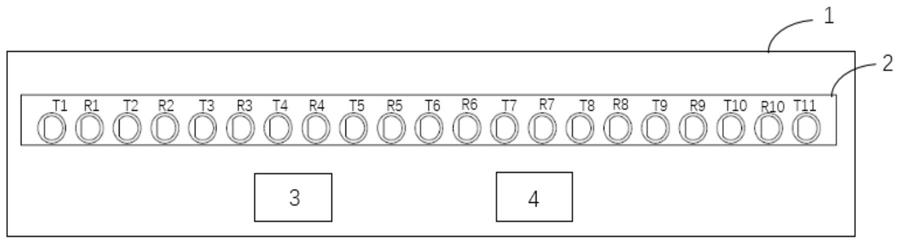
图1示出按照本发明的基于红外反射原理的一种非接触式手势控制模块的示意图;
[0061]
图2示出所述控制电路按照第一实施方式控制各个红外发射管和各个红外接收管的接通和关断的时序图;
[0062]
图3示出所述控制电路按照第二实施方式控制各个红外发射管和各个红外接收管的接通和关断的时序图;
[0063]
图4示出所述控制电路按照第三实施方式控制各个红外发射管和各个红外接收管的接通和关断的时序图;
[0064]
图5示出所述控制电路按照第四实施方式控制各个红外发射管和各个红外接收管的接通和关断的时序图;
[0065]
图6示出按照本发明的基于红外反射原理的另一种非接触式手势控制模块的示意图。
具体实施方式
[0066]
图1示出按照本发明的基于红外反射原理的非接触式手势控制模块1的示意图。所
述手势控制模块1包括由11个红外发射管t1至t11和10个红外发射管r1至r10构成的感应区域2。在此。所述感应区域2的起始和末尾是红外发射管。然而,也可以设置其它数量的多个红外发射管和红外接收管。所述红外发射管与红外接收管沿直线交替排列。然而也可设想的是,所述延伸方向可以是折线方向、平面切线方向或空间切线方向。此外,所述手势控制1还包括控制电路3和信号处理器4,所述控制电路3用于控制各个红外发射管和各个红外接收管的接通和关断,所述信号处理器4用于接收和处理所述多个红外接收管产生的信号并且确定物体在所述感应区域上方在所述延伸方向上的坐标位置。
[0067]
图2示出所述控制电路3按照第一实施方式控制各个红外发射管和各个红外接收管的接通和关断的时序图。所述控制电路3以时分复用的方式控制各个红外发射管和各个红外接收管的接通和关断。为了清晰地阐述所述控制方式,在图2中仅示出6个红外发射管t1至t6和5个红外接收管r1至r5。在图中,纵坐标代表时间,横坐标代表各个红外发射管和红外接收管的状态,其中,用高电平代表接通状态而用低电平代表关断状态。在图2中,在依次接通每个红外发射管时,仅接通与所述红外发射管相邻设置的红外接收管。在此,从一个接通的红外发射管发射的红外光被反射后仅被相邻的红外接收管接收,这减少了需要处理的由红外接收管产生的信号数量,从而便利于数据的处理。在当前的实施方式中,在t1时刻,接通红外发射管t1和红外接收管r1,红外发射管t1的反射光被红外接收管r1接收,因此在t1时刻,在红外接收管r1上产生信号s1。接着在t2时刻,接通红外发射管t2和相邻的红外接收管r1、r2,红外发射管t2的反射光被红外接收管r1和r2接收,因此在t1时刻,在r1上产生信号s2,在r2上产生信号s3。随后,依次接通各个红外发射管,在完成一次扫描后,通过比较在各个接收管上产生的信号s1至s10的幅值和/或斜率和/或相位,能够至少判断物体在其中一个或多个红外接收管附近,从而能够得到物体的坐标。将所述扫描过程不断循环,由此能够判断出物体的运动轨迹,由此能够判断出手势。
[0068]
在图3中示出所述控制电路3按照第二实施方式控制各个红外发射管和各个红外接收管的接通和关断的时序图。其中,与第一实施方式的区别在于,同时接通所有红外接收管r1至r5,并一直保持各个红外接收管的接通状态,而在时间上依次接通每个红外发射管t1至t6。因此,每个时刻仅一个红外发射管发射红外光,其反射光可以被所有红外接收管接收。在第二实施方式中,在一个扫描周期内,每个红外接收管可以在不同时刻接收到来自各个红外发射管的反射信号,由此,能够实现更精确地判断物体的坐标。
[0069]
图4示出所述控制电路3按照第三实施方式控制各个红外发射管和各个红外接收管的接通和关断的时序图。在第三实施方式中,依次接通一个或多个红外收发组,每个红外收发组包括相邻的至少一个红外发射管与至少一个红外接收管。在当前的实施例中,每个红外收发组包括相邻的一个红外发射管和一个红外接收管。与第一实施方式相比,在每个时刻内,每个红外接收管仅能发出来自同组的红外发射管的反射信号。因此,能够降低信号处理的复杂性,提高计算效率。
[0070]
图5示出所述控制电路3按照第四实施方式控制各个红外发射管和各个红外接收管的接通和关断的时序图。在第四实施方式中,时间上错开地接通多个不相邻的红外收发组,每个红外收发组包括相邻的至少一个红外发射管与至少一个红外接收管。在感应区域较长的情况下,如果依次打开每个红外发射管以用于完成一次信号扫描需要耗费较长的时间,因此,如果多个不相邻的红外收发组同时工作,则可以减小扫描时间。
[0071]
图6示出按照本发明的基于红外反射原理的另一种非接触式手势控制模块的示意图。与在图1中示出的实施方式相比,在图6中所示的手势控制模块在所述检测区域2周围设置有多个可见光发光装置5。在当前的实施方式中,所示可见光发光装置为多个可见光发光二极管。然而其它的光学器件如导光体、导光腔、可见光散射层等也是可能的。所述可见光发光装置可以指示物体当前的位置、已输入的手势或操作提示。
[0072]
本发明不限于所示的实施例,而是包括或者延及可落入所附权利要求书的有效范围内的所有技术上的等效物。在说明书中所选择的位置说明如例如上、下、左、右等等参照直接的描述以及示出的附图并且在位置变化时按照意义能转用到新的位置上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1