积水入渗条件下二维土壤水分运动参数估计方法与流程
[0001]
本发明属于农业灌溉技术领域,涉及一种积水入渗条件下二维土壤水分运动参数估计的方法。
背景技术:
[0002]
土壤水分运动参数与土壤水分运动过程紧密相关,对其准确的描述是进行流域水文过程模拟的关键,也可为农田灌溉、生态环境建设等提供重要参考。目前,人们往往采用张力计、离心机、砂芯漏斗等物理实验装置测定出土壤水分特征曲线,对实测数据进行拟合,确定出水分运动参数,或者在土壤水分特征曲线或含水量的基础上建立参数数学模型,采用遗传算法、最小二乘法等数学算法确定水分运动参数,显然,有一定的复杂性,且大量试验耗时、耗费大量人力、物力。
技术实现要素:
[0003]
本发明的目的是提供一种积水入渗条件下二维土壤水分运动参数估计的方法,解决了现有技术中存在的参数估计方法复杂性,以及大量试验耗时且耗费人力、物力的问题。
[0004]
本发明所采用的技术方案是,积水入渗条件下二维土壤水分运动参数估计的方法,包括对土壤水分运动参数α、n、k
s
的估计,其中α为与进气吸力h
d
相关的参数,n为形状参数,k
s
为饱和导水率,具体为估计按照如下公式:
[0005][0006]
其中,k是水平湿润锋距离x
f
和垂直湿润锋距离z
f
的比例系数;
[0007][0008]
其中,n为形状系数;
[0009][0010]
其中,θ
s
是饱和含水量,θ
r
,是滞留含水量,h
d
是进气吸力,n为形状参数,a3为水平湿润锋距离x
f
与时间t拟合表达式的幂函数系数。
[0011]
k通过给定多组水平湿润锋距离x
f
和垂直湿润锋距离z
f
进行拟合得到。
[0012]
形状系数n的表达式为:
[0013][0014]
其中,θ0是初始含水量,a2为对于积水半径固定的二维非饱和土壤水分运动的累积入渗量i和水平湿润锋距离x
f
关系表达式中二次项的系数。
[0015]
对于积水半径固定的二维非饱和土壤水分运动的累积入渗量和水平湿润锋距离x
f
关系表达式为:
[0016][0017]
通过给定多组水平湿润锋距离x
f
和二维非饱和土壤水分运动的累积入渗量i进行拟合分别得到二次项的系数a2和三次项系数a1。
[0018]
进气吸力h
d
的表达式为:
[0019][0020]
水平湿润锋距离x
f
与时间t拟合表达式为:
[0021][0022]
通过给定多组水平湿润锋距离x
f
和时间t进行拟合分别得到幂函数系数a3和指数a4。
[0023]
本发明的有益效果是:在已知水平湿润锋距离、垂直湿润锋距离、累积入渗量,入渗时间这4个在田间试验中容易获得的基本土壤水分入渗物理量的基础上,通过简单地数学方法即可简单有效的确定水分运动参数。
具体实施方式
[0024]
下面结合具体实施方式对本发明进行详细说明。
[0025]
本发明积水入渗条件下二维土壤水分运动参数估计的方法,包括对土壤水分运动参数α、n、k
s
的估计,其中α为与进气吸力h
d
相关的参数,n为形状参数,k
s
为饱和导水率,具体为估计按照如下公式:
[0026][0027]
其中,k是水平湿润锋距离x
f
和垂直湿润锋距离z
f
的比例系数,k通过给定多组水平湿润锋距离x
f
和垂直湿润锋距离z
f
进行拟合得到;
[0028][0029]
其中,n为形状系数,表达式为:
[0030][0031]
其中,θ0是初始含水量,a2为对于积水半径固定的二维非饱和土壤水分运动的累积入渗量i和水平湿润锋距离x
f
关系表达式中二次项的系数,二维非饱和土壤水分运动的累积入渗量i和水平湿润锋距离x
f
关系表达式为:
[0032][0033]
通过给定多组水平湿润锋距离x
f
和二维非饱和土壤水分运动的累积入渗量i进行拟合分别得到二次项的系数a2和三次项系数a1;
[0034][0035]
其中,θ
s
是饱和含水量,θ
r
,是滞留含水量,h
d
是进气吸力,n为形状参数,a3为水平湿润锋距离x
f
与时间t拟合表达式的比数系数;
[0036]
进气吸力h
d
的表达式为:
[0037][0038]
水平湿润锋距离x
f
与时间t拟合表达式为:
[0039][0040]
通过给定多组水平湿润锋距离x
f
和时间t进行拟合分别得到幂函数系数a3和指数a4。
[0041]
实施例
[0042]
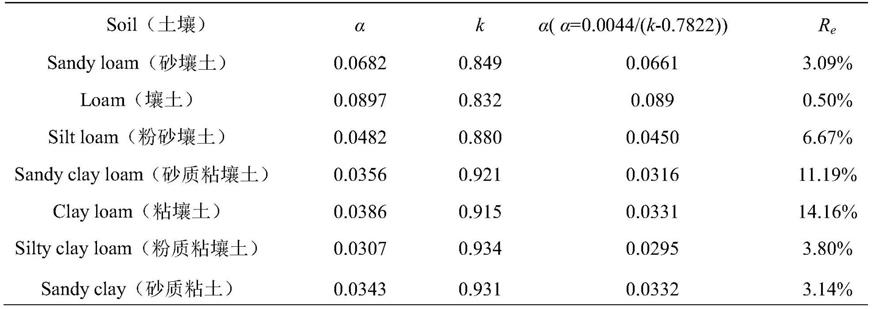
如表1所示为实际土壤水分运动参数α与通过参数估计表达式得到的α的对比结果及其相对误差估计,相对误差表达式为其中x
i
是参数α的估计值,x
i
是由hydrus-3d软件提供的α参数的值。
[0043]
表1
[0044][0045][0046]
通过相对误差分析表明所有土壤的参数α相对误差不超过15%,因此通过该参数估计表达式能很好的估计参数α。
[0047]
如表2所示为9种土壤的由hydrus-3d软件提供的土壤水分运动参数n值与通过参数估计表达式得到的n值对比结果及其相对误差估计。
[0048]
表2
[0049][0050]
通过相对误差分析可得9种土壤相对误差均小于14%,且sandy loam,silt loam,clay loam,silty clay loam,sandy clay,silt clay,clay这7种土的相对误差均小于8%,因此通过该参数估计式能很好地估计参数n。
[0051]
如表3所示为由hydrus-3d软件提供的9种土壤水分运动参数k
s
值与通过参数估计表达式得到的k
s
值对比结果及其相对误差估计。
[0052]
表3
[0053][0054][0055]
通过相对误差分析可得k
s
相对误差均小于21%,因此通过该参数估计式能很好地估计sandy loam,loam,silt loam,sandy clay loam,clay loam,silty clay loam,sandy clay,silt clay,clay的参数k
s
。
[0056]
本发明的推导过程如下:
[0057]
对于积水半径固定的二维非饱和土壤水分运动的累积入渗量表达式如下:
[0058][0059]
令
[0060][0061]
其中
[0062][0063][0064]
下面利用式(4)来求解参数n,整理式(4)可得
[0065][0066]
根据一元二次方程求根公式求解(5)可得
[0067][0068]
再根据可得
[0069]
3n2+(2n-3)n+n=0
ꢀꢀ
(7)
[0070]
根据一元二次方程求根公式求解(7)可得
[0071][0072]
由(6)式和(8)式可得n有两个值,对应求解出n共有4个值,利用代表美国农业部分类方案土壤结构等级(carsel&parish,1988)的且h
d
≥10cm这9种土壤验证可得符合参数求解的表达式为和利用该式得到的参数表达式
[0073]
水平湿润锋x
f
与时间t之间的拟合表达式如下:
[0074]
[0075]
令
[0076][0077]
其中
[0078][0079][0080]
下面利用式(11)来估计参数k
s
,整理(11)式可得:
[0081][0082]
利用本发明估计的参数α,n,k
s
的估计值并结合式(1)和式(9)推得的累积入渗量i和水平湿润锋距离x
f
与由hydrus-3d软件进行数值模拟得到的积水入渗条件下二维非饱和土壤水分运动的累积入渗量i和水平湿润锋距离x
f
的数值结果进行对比分析来验证参数估计方法的实用性。通过累积入渗量i相对误差分析可得sandy loam,loam,silt loam,sandy clay loam,clay loam,silty clay loam,sandy clay,silt clay和clay的相对误差分别为5.75%,6.80%,0.20%,0.33%,0.039%,0.52%,0.54%,0.40%,0.03%。相对误差结果表明除sandy loam,loam以外,其余土壤的相对误差结果不超过1%,且sandy loam,loam相对误差小于7%。通过水平湿润锋距离x
f
相对误差分析可得sandy loam,loam,silt loam,sandy clay loam,clay loam,silty clay loam,sandy clay,silt clay和clay的相对误差分别为9.03%,10.43%,8.08%,4.44%,9.19%,7.52%,13.14%,4.32%,2.67%。相对误差分析结果表明9种土壤的相对误差结果均不超过14%。通过累积入渗量i与水平湿润锋距离x
f
的相对误差分析表明该参数估计方法在工程中有很强的实用性。
[0083]
相对误差表达式为
[0084][0085]
其中x
i
是由参数估计值结合(1)和(9)式得到的累积入渗量i、水平湿润锋距离x
f
,x
i
是利用hydrus-3d软件进行数值模拟得到的累积入渗量i、水平湿润锋距离x
f
。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1