GIS振动缺陷辨识的细节特征量提取及智能分析方法与流程
gis振动缺陷辨识的细节特征量提取及智能分析方法
技术领域
[0001]
本发明属于信息化领域,涉及gis振动缺陷辨识的细节特征量提取及智能分析方法。
背景技术:
[0002]
气体绝缘开关设备(gas insulated switchgear,gis)占地面积少、维护成本低、可靠性高,在电网中被广泛应用。据统计,gis设备在制造、安装和运行过程中产生的潜伏性绝缘缺陷或机械缺陷是导致其发生故障的主要原因。近几年,gis设备在运行过程中出现异响振动的现象逐渐增多,尤其是220kv及以上电压等级gis设备。机械异响振动危害很大,会导致螺栓松动、气体泄漏、气体压力下降、绝缘子损坏等,严重时将造成绝缘事故。
[0003]
振动检测法具有无侵入性、抗干扰性和高灵敏度等优点。针对gis设备机械异响缺陷的振动信号开展检测、特征提取和缺陷状态辨识,对保障gis设备乃至电网安全稳定运行至关重要。发明专利《一种基于振动检测的gis设备机械缺陷诊断系统及方法》提供了指纹数据库和诊断模块结合的gis设备缺陷诊断系统,主要采用特征比对的方式进行状态检测。发明专利《一种基于振动信息的gis特征提取及机械缺陷诊断方法》提供了一种基于两两样本间强相关频点进行gis机械缺陷诊断的方法。发明专利《一种基于振动信号主成分分析法的gis状态识别方法》对进行时域、频域的偏度、平均值等以及固有模态函数的能量的复合特征进行压缩降维和决策辨识的方法,主要对信号整体进行分析。发明专利《一种基于支持向量描述与k近邻算法的gis设备状态评估方法》提供了一种基于振动信号均方根频率和gis内部气压特征进行状态评估的方法。归纳起来,目前在gis设备机械振动异响缺陷诊断研究方面仍存在以下问题:
[0004]
1)在特征提取方面,缺乏对缺陷振动信号高频响应模态的细节信息的表征。已有的特征提取方法多基于振动信号简单的频谱、能量等信息,或对信号整体进行经验模态分解获取其固有模态函数进行特征提取,缺乏对信号更局部和细化信息的挖掘。另一方面,基于噪声辅助的经验模态分解算法存在残留噪声和虚假模态等问题,会对gis设备机械状态的识别准确率产生较大影响。
[0005]
2)缺乏集成振动信号检测、振动状态特征量提取和机械缺陷智能诊断为一体的软硬件平台和辨识分析系统。
[0006]
3)已有的分析方法和模型没有考虑实际检测设备的运行负载状况是变化的,检测样本的振动特性也会随负载的变化而变化。因此,根据实际gis设备的检测时间点对应的负载条件来匹配电压电流条件相近的诊断模型进行识别,有利于提高系统的辨识准确率。另一方面,传统的分析方法局限于某几类缺陷的振动数据进行评价,不具有对诊断系统的样本数据库和辨识模型进行不断学习和更新的能力。
[0007]
针对上述不足,本发明专利提供了一种gis设备异响振动缺陷辨识的组合细节特征量提取及智能分析系统。与已有的振动状态特征提取和振动缺陷诊断方法相比,本发明优势有三个方面,一是克服了噪声辅助经验模态分解方法的残留噪声和虚伪模态问题,并
对每个独立的振动模态进行了细化的特征提取和组合分析,可以增加振动信号的区分度;二是建立了集成振动信号检测、振动状态特征量提取和机械缺陷智能诊断为一体的软件平台,可与用户进行交互式信息输入和直观的结果显示。三是可根据负载电压和电流信息,智能进行辨识模型的匹配,同时基于gis设备异响振动缺陷辨识云端服务器、数据库和网络通信接口对诊断系统进行学习和更新,提高系统的泛化能力,进一步提高缺陷辨识准确率,工程价值显著。
技术实现要素:
[0008]
有鉴于此,本发明的目的在于提供一种gis振动缺陷辨识的细节特征量提取及智能分析方法。该系统主要由数据采集和波形显示单元、组合细节特征提取单元、机械状态辨识单元和评估结果输出单元、无线通信和云服务单元组成。该装置和系统可以实现gis设备振动信号的高灵敏采集、振动模态响应细节组合特征的提取、机械缺陷状态智能诊断和结果显示,具备缺陷辨识模型与数据库的自学习和云更新功能。该gis设备异响振动缺陷辨识的组合细节特征量提取及智能分析系统基于一体化的软硬件平台,具有辨识高效准确的优势,工程应用性强。
[0009]
为达到上述目的,本发明提供如下技术方案:
[0010]
gis振动缺陷辨识的细节特征量提取及智能分析方法,该方法包括以下步骤:
[0011]
s1:构建数据采集和显示控制单元;
[0012]
s2:构建组合细节特征提取单元;
[0013]
s3:构建gis设备机械状态辨识单元;
[0014]
s4:构建辨识结果输出单元;
[0015]
s5:构建无线通信和云服务单元;
[0016]
s6:构建gis设备异响振动机械缺陷智能辨识系统数据库标准样本。
[0017]
可选的,所述s1具体为:
[0018]
对现场采集的振动信号、采集的历史数据进行时域和频域显示;
[0019]
记录采集信号的gis设备运行负载信息、包括电压和电流信息;
[0020]
对采集信号进行指令输入和控制,包括采样数据是否存储指令、是否连续采集指令、采集过程的启动与停止指令以及采样时间和采样率的设置。
[0021]
可选的,所述s2具体为:
[0022]
在模型训练过程中,对系统内置的gis设备机械状态数据库进行特征提取,建立指纹特征数据库;对待评估的gis设备振动样本提取组合细节特征矩阵;
[0023]
组合细节特征提取单元对采集的振动信号样本利用再生相移辅助经验模态分解算法rpsemd获取其获取其固有模态函数imfs,进而采用频域加窗的独立模态组合特征构造方法获取训练样本集源域特征矩阵,具体如下:
[0024]
(1)再生相移正弦波辅助经验模态分解
[0025]
首先,采用自动生成的正弦波作为解析信号,如公式(1)所示;其中k对应分解提取的第k个imf模态分量c
k
(t);而c
k
,f
k
和θ
k
分别是幅值,频率和相位;
[0026]
s
k
(t|a
k
,f
k
,θ
k
)=a
k cos(2πf
k
t+θ
k
)
ꢀꢀꢀ
(1)
[0027]
然后,基于im聚类分析和模态混叠判据设计了s
k
(t);
[0028]
最后,通过θ
k
移动s
k
(t)来改变极值点的位置,不仅有助于保留独立ims的更多细节,而且保证辅助信号s
k
(t)在最终结果中被完全抵消;
[0029]
(2)基于频域加窗的独立模态组合特征提取
[0030]
频域加窗的的独立模态组合特征提取方法首先采用rpsemd分解将振动信号x(t)进行模态分解生成模态分量imfs,利用快速傅里叶变换将imfs转化到频域,根据各模态的频率响应特性设置k个频域加窗区间;
[0031]
然后对每个频率加窗区间的模态分量依次执行峭度和幅值判据,对不满足峭度判据和幅值判据的模态分量进行剔除,同时比选出每个频域加窗区间的主模态分量;
[0032]
最后,组合特征矩阵分别从信号的幅值、衰减特性、脉冲特性以及边际谱分布特性进行度量,对获取的k个独立模态分量进行边际谱转化和奇异值、变异系数、幅值、峭度和频谱重心特征的求取,进而构造组合特征矩阵,各特征量的求解方法如下:
[0033]
奇异值
[0034]
变异系数
[0035]
峭度
[0036]
频谱重心
[0037]
幅值a
m
=max(x
i
),i=1...n。
[0038]
可选的,所述s3具体为:
[0039]
首先,机械状态辨识单元基于gis设备机械状态的gis正常运行、隔离开关接触不良缺陷、长导体底座的螺栓松动缺陷、分子筛吸附剂托盘螺栓松动缺陷和隔离开关弹簧疲劳松动缺陷不同负载和机械状态样本的指纹特征数据库和多核改进的多分类相关向量机mrvms算法进行模型训练,并针对不同电压电流等级的振动样本生成一系列相关负载类型的辨识模型;
[0040]
然后,对待评估的gis设备的异响振动样本采用相同的流程提取组合细节特征矩阵,并根据其记录的电压和电流信息,匹配最相关的机械状态辨识模型,从而实现样本gis设备机械状态的有效辨识;
[0041]
多核改进的多分类相关向量机算法具体细节原理如下:
[0042]
(1)构造多核特征映射核函数
[0043]
假设源域空间大小为n的训练样本集,特征维数为d;选取线性核函数k
line
和高斯径向基核函数k
rbf
建立基核函数矩阵,对每一项k
m
根据mercer定理进行加权求和构造多核核函数k(,),具体表示为:
[0044][0045]
其中1≥β
m
≥0为第m个基核函数k
m
(,)权值,且
[0046]
(2)多核mrvms算法
[0047]
给定源域样本特征向量及类别数据集其中x∈r
n
×
d
,t∈{1,2,3
…
,c};训练集采用多核函数k,核k
m
∈r
n
×
d
的每一行表示基于所选的第m个核函数的观测值n与训练集的其他观测值之间的关系,且
[0048]
学习过程包括模型参数w∈r
n
×
c
的推断,而w
t
k数值的大小表示样本和数据之间的关联性,扮演类似于一个投票系统的角色,从而使模型具有适当的判别性质;
[0049]
通过引入辅助变量y∈r
n
×
c
来实现多层判别,y是w
t
k的回归目标,其分布符合标准噪声模型辅助变量被赋予独立的标准化高斯概率分布,以保证统计可辨识性,并实现闭式迭代推理;回归因子w表示数据点为特定类“投票”的权重,辅助变量y表示一个类成员资格的排序系统,给定一个样本n,则根据其最高的y值y
cn
,从而将其归为第c类;y的连续性不仅允许通过多项式概率似然函数进行多类判别,即同时对每一层的成员都提供了一个概率输出;
[0050][0051]
式中:u~n(0,1);φ是高斯累计分布函数;
[0052]
设置权重w服从标准正态的先验分布以保证模型的稀疏性,其中,α
nc
属于尺度矩阵a∈r
n
×
c
,并服从超参数为γ和ν的伽马分布;通过设置γ和ν处于较小值从而限制大多数的权重w在0值附近,进而得到极少的非0相关向量(relevance vectors,rv)构成模型的稀疏解;权重w的后验概率如下:
[0053][0054]
其中a
c
为尺度矩阵a的第c列导出的对角矩阵;回归因子w的最大后验概率(map)估计量为:给定一个类c,类别参数会根据map值进行按式(6)进行更新;
[0055][0056]
根据式(6)得到辅助变量y的e-step形式,对于得到:
[0057][0058]
对于第i层,即c=i,
[0059][0060]
利用给定的超参数γ和ν和伽马分布函数,对均值进行估计:
[0061][0062]
训练过程对式(6)-(9)中的模型参数进行更新,直至收敛。
[0063]
可选的,所述s4具体为:
[0064]
辨识结果输出和显示单元对样本的辨识分析结果进行概率性的输出和显示;该单元提供了样本隶属于每一个状态的概率,并根据其隶属概率最大的缺陷类型设置了警示性
的提醒,同时提供了相关的检修建议方便进一步运维工作的开展;
[0065]
辨识结果输出单元提供样本波形和组合特征查询功能,对检测样本的原信号、rpsemd分解的各振动模态信号的时域和频域波形进行输出和显示,并提供其幅值和重心频率特征信息。
[0066]
可选的,所述s5具体为:
[0067]
无线通信和云服务单元支持多种通讯协议和通讯规约标准接入方式,包括nbiot,wifi,2g-5g和蓝牙,整体遵循iec标准,数据交换功能为多数据源、多数据格式提供数据接入和共享上传接口,有利于实现进一步的数据利用和信息挖掘;
[0068]
无线通信和云服务单元依托paas级云计算平台的海量实时数据传输和筛选整合能力,为gis设备运维相关用户建立远程数据的实时集中管控平台;用户通过与云服务器的网络对接实现系统的实时维护,进行gis机械状态数据库和诊断算法方案的实时更新,从而不断扩充样本数据库状态类型和数据量,提高诊断算法模型的准确性。
[0069]
可选的,所述s6具体为:
[0070]
采用实验室gis设备振动模拟平台对0-3000a范围的不同负载电流下的gis设备正常运行、隔离开关接触不良缺陷、长导体底座的螺栓松动缺陷、分子筛吸附剂托盘螺栓松动缺陷、隔离开关弹簧疲劳松动缺陷的5种机械状态的振动工况进行了模拟,同时高灵敏度的gis设备异响振动检测装置和缺陷辨识系统开展了数据采集、组合特征提取和机械状态辨识系统的训练学习工作。
[0071]
本发明的有益效果在于:
[0072]
(1)本发明采用了再生相移动辅助经验模态分解获取振动信号的固有模态函数,然后基于频域加窗方法和幅值、峭度判据获取了振动信号的独立模态序列,进而求解了每个模态的奇异值、峭度、变异系数、幅值、重心频率等细节组合特征,能增加不同状态振动信号的区分度。
[0073]
(2)本发明结合不同电压等级和负载电流下的多种机械状态的gis设备振动样本和多核改进的多分类相关向量机建立了gis设备机械缺陷辨识模型,用户可针对现场测试设备的负载条件和电压等级进行交互输入,然后匹配对应电流电压条件的辨识模型,提高了模型对样本的适应性。第三,本发明提供了信号检测到辨识结果显示输出的一体化操作,并配置了蓝牙、wifi和4g/5g的多种通信方式,可根据实际需求基于云服务器对辨识系统的样本数据库和辨识模型进行上传、更新和学习,提高模型对复杂缺陷的诊断能力。
[0074]
本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
[0075]
为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作优选的详细描述,其中:
[0076]
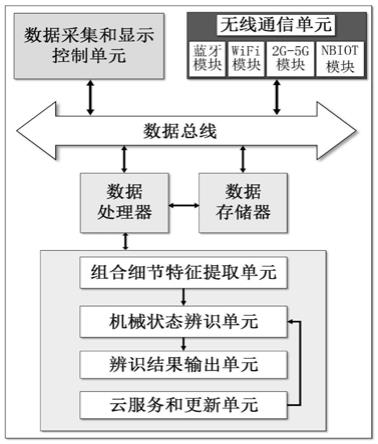
图1为本发明系统框架图;
[0077]
图2为本发明流程图;
[0078]
图3为再生相移正弦波辅助经验模态分解流程图;
[0079]
图4为基于频域加窗的独立模态组合特征提取流程图;
[0080]
图5为gis设备机械状态辨识流程图;
[0081]
图6为多核mrvms模型图;
[0082]
图7为gis设备异响振动云服务器功能示意图;
[0083]
图8为gis设备异响机械缺陷辨识系统建立流程图;
[0084]
图9为隔离开关接触不良(缺陷1)和长导体触座松动(缺陷2)振动信号图谱;
[0085]
图10为gis设备异响机械缺陷辨识系统结果输出;(a)为长导体触座松动;(b)为隔离开关接触不良。
具体实施方式
[0086]
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
[0087]
其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本发明的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
[0088]
本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本发明的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
[0089]
本发明gis设备异响振动缺陷辨识的组合细节特征量提取及智能分析系统如图1所示。该系统主要由振动信号的数据采集和波形显示单元、组合细节特征提取单元、机械状态辨识单元和评估结果输出单元、无线通信和云服务单元组成。
[0090]
实现具体步骤如图2所示。
[0091]
3.1构建数据采集和显示控制单元
[0092]
数据采集和显示控制单元主要功能为三个方面:一是对现场采集的振动信号、采集的历史数据进行时域和频域显示;二是记录采集信号的gis设备运行负载信息、包括电压和电流信息,如若没有电流信息,则可不做记录。三是对采集信号进行指令输入和控制,包括采样数据是否存储指令、是否连续采集指令、采集过程的启动与停止指令以及采样时间、采样率的设置等。
[0093]
3.2构建组合细节特征提取单元
[0094]
组合细节特征提取单元由两个方面功能组成。一是在模型训练过程中,对系统内
置的gis设备机械状态数据库进行特征提取,建立指纹特征数据库;二是对待评估的gis设备振动样本提取组合细节特征矩阵。
[0095]
组合细节特征提取单元对采集的振动信号样本利用再生相移辅助经验模态分解算法(regenerated phase-shifted sinusoid-assisted empirical mode decomposition,rpsemd)获取其获取其固有模态函数(imfs,intrinsic mode function components),进而采用频域加窗的独立模态组合特征构造方法获取训练样本集源域特征矩阵,具体细节如下:
[0096]
(1)再生相移正弦波辅助经验模态分解
[0097]
再生相移正弦波辅助经验模态分解(regenerated phase-shifted sinusoid-assisted empirical mode decomposition,rpsemd)主要由三个步骤构成。首先,采用自动生成的正弦波作为解析信号,如公式(1)所示。其中k对应分解提取的第k个imf模态分量c
k
(t)。而c
k
,f
k
和θ
k
分别是幅值,频率和相位。
[0098]
s
k
(t|a
k
,f
k
,θ
k
)=a
k
cos(2πf
k
t+θ
k
)
ꢀꢀꢀ
(1)
[0099]
然后,基于im聚类分析和模态混叠判据设计了s
k
(t)
[21]
。这种主动的方法能保证rpsemd的确定性,更有效地解决mmp问题。
[0100]
最后,通过θ
k
移动s
k
(t)来改变极值点的位置,不仅有助于保留独立ims的更多细节,而且保证辅助信号s
k
(t)在最终结果中被完全抵消。rpsemd算法的整体流程如图3所示。
[0101]
(2)基于频域加窗的独立模态组合特征提取
[0102]
频域加窗的的独立模态组合特征提取方法首先采用rpsemd分解将振动信号x(t)进行模态分解生成模态分量imfs,利用快速傅里叶变换将imfs转化到频域,根据各模态的频率响应特性设置k个频域加窗区间。
[0103]
然后对每个频率加窗区间的模态分量依次执行峭度和幅值判据,对不满足峭度判据和幅值判据的模态分量进行剔除,同时比选出每个频域加窗区间的主模态分量。
[0104]
最后,组合特征矩阵分别从信号的幅值、衰减特性、脉冲特性以及边际谱分布等特性进行度量,对获取的k个独立模态分量进行边际谱转化和奇异值、变异系数、幅值、峭度、频谱重心等特征的求取,进而构造组合特征矩阵,各特征量的求解方法如表1所示。
[0105]
表1组合特征量求取方法
[0106][0107]
3.3构建gis设备机械状态辨识单元
[0108]
机械状态辨识单元主要对未知状态gis设备的振动信号样本进行状态分类和识
别,主要为两个步骤:
[0109]
首先,机械状态辨识单元基于gis设备机械状态的gis正常运行、隔离开关接触不良缺陷、长导体底座的螺栓松动缺陷、分子筛吸附剂托盘螺栓松动缺陷、隔离开关弹簧疲劳松动缺陷等不同负载和机械状态样本的指纹特征数据库和多核改进的多分类相关向量机(multi-class relevance vector machines,mrvms)算法进行模型训练,并针对不同电压电流等级的振动样本生成一系列相关负载类型的辨识模型。
[0110]
然后,对待评估的gis设备的异响振动样本采用相同的流程提取组合细节特征矩阵,并根据其记录的电压和电流信息,匹配最相关的机械状态辨识模型,从而实现样本gis设备机械状态的有效辨识。
[0111]
图4为基于频域加窗的独立模态组合特征提取流程图;
[0112]
图5为gis设备机械状态辨识流程图;
[0113]
多核改进的多分类相关向量机算法具体细节原理如下:
[0114]
(1)构造多核特征映射核函数
[0115]
假设源域空间大小为n的训练样本集,特征维数为d。选取线性核函数k
line
和高斯径向基核函数k
rbf
建立基核函数矩阵,对每一项k
m
根据mercer定理进行加权求和构造多核核函数k(,),具体表示为:
[0116][0117]
其中1≥β
m
≥0为第m个基核函数k
m
(,)权值,且
[0118]
(2)多核mrvms算法
[0119]
采用多核函数k(,)对mrvms改进后的模型图6所示。给定源域样本特征向量及类别数据集其中x∈r
n
×
d
,t∈{1,2,3
…
,c}。训练集采用多核函数k,核k
m
∈r
n
×
d
的每一行表示基于所选的第m个核函数的观测值n与训练集的其他观测值之间的关系,且
[0120]
学习过程包括模型参数w∈r
n
×
c
的推断,而w
t
k数值的大小表示样本和数据之间的关联性,扮演类似于一个投票系统的角色,从而使模型具有适当的判别性质。
[0121]
通过引入辅助变量y∈r
n
×
c
来实现多层判别,y是w
t
k的回归目标,其分布符合标准噪声模型辅助变量被赋予独立的标准化高斯概率分布,以保证统计可辨识性,并实现闭式迭代推理。回归因子w表示数据点为特定类“投票”的权重,辅助变量y表示一个类成员资格的排序系统,给定一个样本n,则根据其最高的y值y
cn
,从而将其归为第c类。y的连续性不仅允许通过多项式概率似然函数进行多类判别,即同时对每一层的成员都提供了一个概率输出。
[0122][0123]
式中:u~n(0,1);φ是高斯累计分布函数。
[0124]
设置权重w服从标准正态的先验分布以保证模型的稀疏性,其中,α
nc
属于尺度矩阵a∈r
n
×
c
,并服从超参数为γ和ν的伽马分布。通过设置γ和ν处于较小值从而
限制大多数的权重w在0值附近,进而得到极少的非0相关向量(relevance vectors,rv)构成模型的稀疏解。权重w的后验概率如下:
[0125][0126]
其中a
c
为尺度矩阵a的第c列导出的对角矩阵。所以回归因子w的最大后验概率(map)估计量为:因此,给定一个类c,类别参数会根据map值进行按式(6)进行更新。
[0127][0128]
根据式()可以得到辅助变量y的e-step形式,对于可以得到:
[0129][0130]
对于第i层,即c=i,
[0131][0132]
与此同时,利用给定的超参数γ和ν和伽马分布函数,可以对均值进行估计:
[0133][0134]
训练过程对式(6)-(9)中的模型参数进行更新,直至收敛。
[0135]
3.4构建辨识结果输出单元
[0136]
辨识结果输出和显示单元对样本的辨识分析结果进行概率性的输出和显示。该单元提供了样本隶属于每一个状态的概率,并根据其隶属概率最大的缺陷类型设置了警示性的提醒,同时提供了相关的检修建议方便进一步运维工作的开展。
[0137]
辨识结果输出单元提供样本波形和组合特征查询功能,可对检测样本的原信号、rpsemd分解的各振动模态信号的时域和频域波形进行输出和显示,并提供其幅值、重心频率等特征信息。
[0138]
3.5构建无线通信和云服务单元
[0139]
无线通信和云服务单元支持多种通讯协议和通讯规约标准接入方式,包括nbiot,wifi,2g-5g和蓝牙等,整体遵循iec标准,数据交换功能为多数据源、多数据格式提供数据接入和共享上传接口,有利于实现进一步的数据利用和信息挖掘。
[0140]
无线通信和云服务单元依托paas级云计算平台的海量实时数据传输和筛选整合能力,为gis设备运维相关用户建立远程数据的实时集中管控平台。用户可通过与云服务器的网络对接实现系统的实时维护,同时可进行gis机械状态数据库和诊断算法方案的实时更新,从而不断扩充样本数据库状态类型和数据量,提高诊断算法模型的准确性。
[0141]
3.6构建gis设备异响振动机械缺陷智能辨识系统数据库标准样本
[0142]
图7为gis设备异响振动云服务器功能示意图;采用实验室gis设备振动模拟平台对0-3000a范围的不同负载电流下的gis设备正常运行、隔离开关接触不良缺陷、长导体底座的螺栓松动缺陷、分子筛吸附剂托盘螺栓松动缺陷、隔离开关弹簧疲劳松动缺陷的5种机械状态的振动工况进行了模拟,同时高灵敏度的gis设备异响振动检测装置和缺陷辨识系
统开展了数据采集、组合特征提取和机械状态辨识系统的训练学习工作。具体体流程如图8所示。
[0143]
3.7案例分析及验证
[0144]
通过本发明gis设备异响振动缺陷辨识的组合细节特征量提取及智能分析系统,可以对不同负载下的gis设备的机械状态进行分析和辨识。采用相同的采样率和时间设置对分别存在隔离开关接触不良(缺陷1)和长导体触座松动(缺陷2)两种机械缺陷的gis设备进行了2400a和73kv负载振动样本的采集,得到的信号时域和频域图如图9所示。
[0145]
将测量的gis设备机械振动样本进行rpsemd分解和频域加窗的组合细节特征提取,得到对应的组合细节特征矩阵如表2所示:
[0146]
表2隔离开关接触不良和长导体触座松动缺陷组合细节特征量
[0147][0148]
系统将自动把生成的组合细节特征矩阵带入gis设备异响机械缺陷辨识系统,可以自动进行机械状态类型的识别。并会将识别结果和各状态的隶属概率发送到显示和输出单元,与rpsemd分解得到的模态结果、检修建议进行联合的界面显示,结果如图10所示。(a)为长导体触座松动;gis机械状态辨识结果:长导体接触底座的连接件70.18%的概率存在松动性缺陷,建议运维部门进行重点关注,异常严重则迅速采取故障排除工作;(b)为隔离开关接触不良。gis机械状态辨识结果:隔离开关的触指96.78%的概率存在接触不良缺陷,建议运维部门进行重点关注,检查是否是操作机构松动导致,并及时排除隐患。
[0149]
从检测样本输出的辨识结果可以发现,第一个缺陷是长导体触座松动的概率是70.18%,第二个缺陷是隔离开关接触不良缺陷的概率是96.78%,与实际的缺陷类型均吻合。因此,验证了本发明gis设备异响振动缺陷辨识的组合细节特征量提取及智能分析系统的准确性和良好实用性。
[0150]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1