一种基于RGB色彩空间的微流血型检测卡微腔反应池精密定位方法
一种基于rgb色彩空间的微流血型检测卡微腔反应池精密定位方法
技术领域
1.本发明属于视觉测量领域,具体涉及一种基于rgb色彩空间的微流血型检测卡微腔反应池精密定位方法。
背景技术:
2.abo和rh血型是人类最重要的两种血型系统,其检测方法包括玻片法、试管法、微孔板法和血型试剂卡法等。目前国内液体
‑
纸片血凝检测试剂(液体
‑
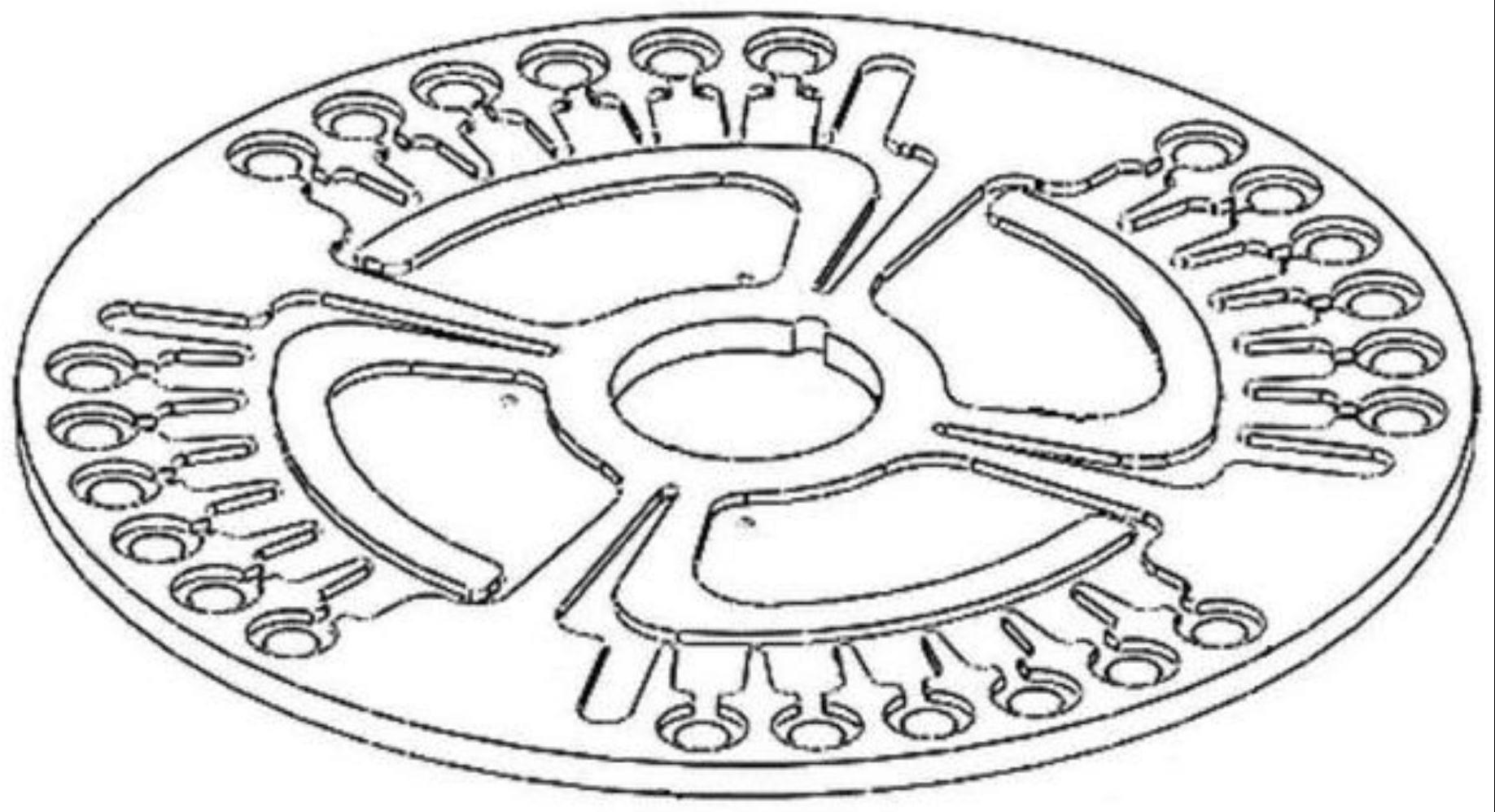
纸片试剂)和abo/rh正反定型血型定型试剂卡是应用量最大的两种检测方法。但由于这些方法均存在一定的弱点,现在又有人提出一种微流血型检测卡,如图1所示,卡中的多个圆形微腔反应池中分别封装有单克隆抗体,待测血液与单克隆抗体在微腔反应池进行免疫反应,反应得到红色的图像,通过采集圆形微腔反应池的红色图像,并对微腔反应池的红色图像进行判别处理判断待测血液的血型。由于运动机构存在定位误差、摄像头焦距调整也存在误差,在采集不同微腔反应池图像时,圆形微腔反应池红色图像在摄像头整体视野图像中的位置是有一定差异的,为保证仅对圆形微腔反应池红色图像进行判别处理,必须人为圈定圆形微腔反应池红色图像的范围,再对圈定的图像进行判别处理,但这种人工参与的处理方法不合适于自动检测的需要。
3.在自动检测过程中,如处理软件不进行圆形微腔反应池红色图像的定位处理,就不得不根据位置误差的实际情况,缩小要进行判别处理图像的直径,确保当圆形微腔反应池红色图像出现位置误差时,要进行判别处理图像也能在圆形微腔反应池红色图像内部,但这样做由于没有对全部的圆形微腔反应池红色图像进行判别处理,增加了判别出现错误结果的可能性。
4.因此在自动检测过程中,处理软件不得不进行圆形微腔反应池红色图像的定位处理,传统的圆定位方法一般通过hough变换或其改进算法进行,但微腔反应池红色图像中也包含了包括圆形在内的各种图案,会干扰hough变换算法的检测结果,为克服这一点要进行复杂的前期处理,大大增加算法的计算量,不利于自动检测速度的提升。
5.本发明所提出的一种基于rgb色彩空间的微流血型检测卡微腔反应池精密定位方法,针对上述问题提出了一种新的解决方案。
技术实现要素:
6.本发明的目的是克服现有技术的上述缺陷,根据微流血型检测卡微腔反应池图像的色彩特点,利用很少的计算量就可实现圆形微腔反应池红色图像在摄像头视野中的定位。
7.本发明提供一种基于rgb色彩空间的微流血型检测卡微腔反应池精密定位方法。该方法利用彩色ccd图像传感器采集微流血型检测卡微腔反应池的rgb图像,由于在利用血型检测卡检测血型时,待测血液与单克隆抗体在微腔反应池进行免疫反应,反应得到的图
像时红色的,即检测卡微腔反应池的边界内部是红色的,血型检测图像的信息集中于rgb空间中的r分量中,b分量和g分量较小;图像微腔反应池的边界外部的图像是白色背景,有比较大的b分量和g分量,在边界处bg分量存在阶梯式的变化,因此,通过对bg分量的图像数据分析,能方便快捷的准确得到检测卡圆形微腔反应池的中心,实现精密定位。
8.一种基于rgb色彩空间的微流血型检测卡微腔反应池精密定位方法,包括以下步骤:
9.步骤1:在白色背景下采集微流血型检测卡微腔反应池的rgb彩色图像,对图像进行裁剪,裁剪后的图像是一个rgb彩色n
×
n像素矩阵c,它包含一个完整的圆形微腔反应池,n代表c中的行数和列数;
10.步骤2:把上述rgb彩色n
×
n像素矩阵c按rgb颜色空间的分成3个单色n
×
n像素矩阵,计为像素矩阵r、像素矩阵g、像素矩阵b;
11.步骤3:在代表绿色的像素矩阵g中确定圆形微腔反应池边界,具体步骤如下:
12.步骤3
‑
1:定义一个阈值g;
13.步骤3
‑
2:在n
×
n像素矩阵g中的每一行中,先从左向右逐像素与阈值g比较,当遇到低于阈值g的像素点时,确定此像素点为圆形微腔反应池边界点,并记录坐标;如果遍历到一行的最后一个像素点也没有发现边界点,继续下一行的遍历;在发现一个边界点后,终止从左向右的遍历,开始在这一行中从右向左逐像素与阈值g比较,当遇到低于阈值g的像素点时,确定此像素点为圆形微腔反应池边界点,记录坐标,并继续下一行的遍历;
14.步骤3
‑
3、在完成像素矩阵g中n行的遍历后,得到了m个边界点的坐标(gxi,gyi),其中i取值1~n,这些边界点坐标的平均值(gx,gy)为g颜色空间内圆形微腔反应池的圆心坐标,即
15.步骤4:在代表兰色的像素矩阵b中确定圆形微腔反应池边界,具体步骤如下:
16.步骤4
‑
1:定义一个阈值b;
17.步骤4
‑
2:在n
×
n像素矩阵b中的每一行中,先从左向右逐像素与阈值b比较,当遇到低于阈值b的像素点时,确定此像素点为圆形微腔反应池边界点,并记录坐标;如果遍历到一行的最后一个像素点也没有发现边界点,继续下一行的遍历;在发现一个边界点后,终止从左向右的遍历,开始在这一行中从右向左逐像素与阈值b比较,当遇到低于阈值b的像素点时,确定此像素点为圆形微腔反应池边界点,记录坐标,并继续下一行的遍历;
18.步骤4
‑
3:在完成像素矩阵b中n行的遍历后,得到了k个边界点的坐标(bxi,byi),其中i取值1~k,这些边界点坐标的平均值(bx,by)为b颜色空间内圆形微腔反应池的圆心坐标,即
19.步骤5:综合步骤3和步骤4的结果,取(gx,gy)和(bx,by)的平均值得到最终确定的圆形微腔反应池圆心坐标(x,y),即x=(gx+bx)/2,y=(gy+by)/2。
20.所述步骤1具体如下:采集微流血型检测卡微腔反应池的rgb彩色图像,对图像进行适当裁剪,裁剪后的图像是一个rgb彩色n
×
n像素矩阵c,它包含一个完整的圆形微腔反应池,并且在微腔反应池四周均有空白区域。
21.所述步骤3
‑
1中的阈值g可根据n
×
n像素矩阵g中最外围像素点的最小值进行选
取,一般可取最小值的80%
‑
90%。
22.所述步骤4
‑
1中的阈值b可根据n
×
n像素矩阵b中最外围像素点的最小值进行选取,一般可取最小值的80%
‑
90%。
23.所述步骤5中最终确定的圆形微腔反应池圆心坐标(x,y)时,可取(gx,gy)为圆心坐标,即x=gx,y=gy。
24.所述步骤5中最终确定的圆形微腔反应池圆心坐标(x,y)时,可取(bx,by)为圆心坐标,即x=bx,y=by。
25.本发明的有益效果是:
26.利用很少的计算量就可实现圆形微腔反应池红色图像在摄像头视野中的精确定位,且方法相对简单,便于操作,易推广。
附图说明
27.图1是微流血型检测卡示意图。
28.图2是微流血型检测卡圆形微腔反应池图像示意图。
具体实施方式
29.微流血型检测卡圆形微腔反应池的图像如附图2所示,图中包含了ccd图像的视野边界1、圆形微腔反应池与视野边界的白色背景间隙2、圆形微腔反应池边界3和红色圆形微腔反应池4。
30.本发明的具体实施方案为:
31.步骤1:在白色背景下采集微流血型检测卡微腔反应池的rgb彩色图像,对图像进行裁剪,裁剪后的图像是一个rgb彩色n
×
n图像c,它包含一个完整的圆形微腔反应池4,n代表c中的行数和列数;
32.步骤2:把上述rgb彩色n
×
n图像c按rgb颜色空间的分成3个单色n
×
n像素矩阵,计为像素矩阵r、像素矩阵g、像素矩阵b;
33.步骤3:在代表绿色的像素矩阵g中确定圆形微腔反应池边界3,具体步骤如下:
34.步骤3
‑
1:定义一个阈值g;
35.步骤3
‑
2:在n
×
n像素矩阵g中的每一行中,先从左向右逐像素与阈值g比较,当遇到低于阈值g的像素点时,确定此像素点为圆形微腔反应池边界点,并记录坐标;如果遍历到一行的最后一个像素点也没有发现边界点,继续下一行的遍历;在发现一个边界点后,终止从左向右的遍历,开始在这一行中从右向左逐像素与阈值g比较,当遇到低于阈值g的像素点时,确定此像素点为圆形微腔反应池边界点,记录坐标,并继续下一行的遍历;
36.步骤3
‑
3:在完成像素矩阵g中n行的遍历后,得到了m个边界点的坐标(gxi,gyi),其中i取值1~n,这些边界点坐标的平均值(gx,gy)为g颜色空间内圆形微腔反应池的圆心坐标,即
37.步骤4:在代表兰色的像素矩阵b中确定圆形微腔反应池边界,具体步骤如下:
38.步骤4
‑
1:定义一个阈值b;
39.步骤4
‑
2:在n
×
n像素矩阵b中的每一行中,先从左向右逐像素与阈值b比较,当遇
到低于阈值b的像素点时,确定此像素点为圆形微腔反应池边界点,并记录坐标;如果遍历到一行的最后一个像素点也没有发现边界点,继续下一行的遍历;在发现一个边界点后,终止从左向右的遍历,开始在这一行中从右向左逐像素与阈值b比较,当遇到低于阈值b的像素点时,确定此像素点为圆形微腔反应池边界点,记录坐标,并继续下一行的遍历;
40.步骤4
‑
3:在完成像素矩阵b中n行的遍历后,得到了k个边界点的坐标(bxi,byi),其中i取值1~k,这些边界点坐标的平均值(bx,by)为b颜色空间内圆形微腔反应池的圆心坐标,即
41.步骤5:综合步骤3和步骤4的结果,取(gx,gy)和(bx,by)的平均值得到最终确定的圆形微腔反应池圆心坐标(x,y),即x=(gx+bx)/2,y=(gy+by)/2。
42.所述步骤1具体如下:采集微流血型检测卡微腔反应池的rgb彩色图像,对图像进行适当裁剪,裁剪后的图像是一个rgb彩色n
×
n像素矩阵c,它包含一个完整的圆形微腔反应池,并且在微腔反应池四周均有空白区域。
43.所述步骤3
‑
1中的阈值g可根据n
×
n像素矩阵g中最外围像素点的最小值进行选取,一般可取最小值的80%
‑
90%。
44.所述步骤4
‑
1中的阈值b可根据n
×
n像素矩阵b中最外围像素点的最小值进行选取,一般可取最小值的80%
‑
90%。
45.所述步骤5中最终确定的圆形微腔反应池圆心坐标(x,y)时,可取(gx,gy)为圆心坐标,即x=gx,y=gy。
46.所述步骤5中最终确定的圆形微腔反应池圆心坐标(x,y)时,可取(bx,by)为圆心坐标,即x=bx,y=by。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1