一种基于智能终端的指针式仪表识别方法及系统与流程
1.本发明涉及仪表识别技术领域,具体涉及一种基于智能终端的指针式仪表识别方法及系统。
背景技术:
2.如今的工厂设备中,存在大量的指针仪表,需要定期进行抄表。仪表有很多在室外,而外部环境比较复杂,光照和天气都是不确定的。目前的指针仪表智能识别方法通常是在开源opencv图像识别算法基础上采用全图像识别的方式,对仪表盘、刻度、指针位置分别进行识别,为提高识别效率和精度,要进行大量的额外的工作。图像识别的计算模型需要大量的图像训练,必须要考虑室外、天气、光照等因素,为此需要耗费设计和开发人员很多精力去寻找尽可能多场景下仪表的图像资料,不断地调整计算模型,才能达到一定的计算准确度。
3.另外,全图像识别的识别方式对后台算力配置和网络要求较高,为提高图像计算效率,需要配置较高的算力和低网络延时,这两个条件都具备情况下,识别时间通常需要3
‑
5秒。要保证一定的识别效率需要比较大的硬件成本,一般的中小型企业往往不具备这样的条件。
技术实现要素:
4.本发明的目的在于提高在复杂环境下指针仪表识别的效率,降低对后台算力和网络等硬件配置要求,提供了一种基于智能终端的指针式仪表识别方法及系统,其具有成本低、操作方便、维护简单等特点。
5.为实现上述目的,本发明采用了如下技术方案:
6.本发明首先提供了一种基于智能终端的指针式仪表识别方法,包括如下步骤:
7.采集目标仪表的仪表图像;
8.若所述仪表图像与预设仪表库中的仪表图像相同,则获取该仪表图像对应的仪表参数;
9.识别所述仪表图像,获得角度偏转量;
10.根据所述角度偏转量和所述仪表参数,计算仪表的读数值。
11.进一步的,所述若所述仪表图像与预设仪表库中的仪表图像相同还包括:
12.若所述仪表图像与预设仪表库中的仪表图像不相同,则采集目标仪表的仪表参数并保存于预设仪表库中。
13.进一步的,所述根据所述角度偏转量和所述仪表参数,计算仪表的读数值包括:
14.所述仪表参数包括仪表读数下限刻度值、仪表读数上限刻度值、仪表读数上限刻度值对应的角度偏转量和仪表读数下限刻度值对应的角度偏转量;
15.根据所述角度偏转量和所述仪表参数,基于如下公式计算仪表的读数值:
[0016][0017]
其中,y代表仪表的读数值,y0代表仪表读数下限刻度值,y
max
代表仪表读数上限刻度值,α
max
代表仪表读数上限刻度值对应的角度偏转量,α0代表仪表读数下限刻度值对应的角度偏转量。
[0018]
进一步的,所述识别所述仪表图像,获得角度偏转量包括:
[0019]
在智能终端的屏幕上生成虚拟基准线;
[0020]
当所述虚拟基准线与所述仪表图像中刻度线或指针的重合度达到预设阈值时,获得当前刻度线或指针对应的角度偏转量。
[0021]
进一步的,所述识别所述仪表图像,获得角度偏转量包括:
[0022]
基于opencv的数字和霍夫直线变换识别算法,识别所述仪表图像。
[0023]
本发明还提供了一种基于智能终端的指针式仪表识别系统,包括配置于智能终端上的:
[0024]
图像采集单元,用于采集目标仪表的仪表图像;
[0025]
比较单元,用于比对所述仪表图像与预设仪表库中的仪表图像是否相同,若相同,则获取该仪表图像对应的仪表参数;
[0026]
识别单元,用于识别所述仪表图像,获得角度偏转量;
[0027]
计算单元,用于根据所述角度偏转量和所述仪表参数,计算仪表的读数值。
[0028]
进一步的,所述比较单元还用于当所述仪表图像与预设仪表库中的仪表图像不相同时,采集目标仪表的仪表参数并保存于预设仪表库中。
[0029]
进一步的,所述仪表参数包括仪表读数下限刻度值、仪表读数上限刻度值、仪表读数上限刻度值对应的角度偏转量和仪表读数下限刻度值对应的角度偏转量;
[0030]
所述计算单元计算仪表的读数值包括:根据所述角度偏转量和所述仪表参数,基于如下公式计算仪表的读数值:
[0031][0032]
其中,y代表仪表的读数值,y0代表仪表读数下限刻度值,y
max
代表仪表读数上限刻度值,α
max
代表仪表读数上限刻度值对应的角度偏转量,α0代表仪表读数下限刻度值对应的角度偏转量。
[0033]
进一步的,所述识别单元识别所述仪表图像,获得角度偏转量包括:
[0034]
在智能终端的屏幕上生成虚拟基准线;
[0035]
当所述虚拟基准线与所述仪表图像中刻度线或指针的重合度达到预设阈值时,获得当前刻度线或指针对应的角度偏转量。
[0036]
进一步的,所述识别单元基于opencv的数字和霍夫直线变换识别算法,识别所述仪表图像。
[0037]
本发明的有益效果如下:
[0038]
本发明的方法和系统,充分考虑了指针仪表所处环境的复杂度,结合智能终端自带的传感器技术可以有效提高指针仪表识别成功率,节省识别的时间。同时利用基于
opencv的霍夫直线变换识别技术,精确的定位指针位置,通过预设公式计算得出当前仪表数值。本发明算法简单,不要求图像训练即可达到稳定的成功率和准确率,同时充分利用智能终端性能,不依赖高效服务器和网络,降低了企业实施成本。
附图说明
[0039]
图1为本发明系统实施例的单元构成示意图。
[0040]
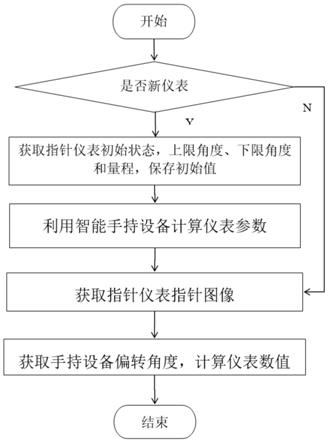
图2为本发明方法实施例的流程示意图。
[0041]
图3为本发明实施例中智能终端识别模拟示意图。
具体实施方式
[0042]
为了进一步理解本发明,下面结合实施例对本发明优选实施方案进行描述,但是应当理解,这些描述只是为进一步说明本发明的特征和优点,而不是对本发明权利要求的限制。
[0043]
如前面背景技术所述,现有的指针仪表智能识别方法通常是在开源opencv图像识别算法基础上采用全图像识别的方式,对仪表盘、刻度、指针位置分别进行识别。为提高识别效率和精度,图像识别的计算模型需要大量的图像训练,还要考虑各种环境因素的影响,收集各种环境条件下的大量图像进行训练。然而,单就基本的刻度(数字)识别和直线对齐(图像重合度)识别,基于opencv的相关图像识别算法已较为成熟,可达到理想的识别效果。
[0044]
另一方面,随着技术的发展,现有的智能手机或pda等智能终端普遍配置了方向传感器,以实现指南针等方向指示功能,其也可以输出智能终端在任意位置时的相对偏转角度。
[0045]
基于上述背景,本发明实施例提供了一种基于智能终端比如智能手机的指针式仪表识别系统,参考附图1,其包括以app或小程序形式配置于智能终端上的:
[0046]
图像采集单元101,其用于调用摄像头106采集目标仪表的仪表图像;
[0047]
比较单元102,其用于比对采集的仪表图像与预设仪表库105中的仪表图像是否相同,若相同,则获取该仪表图像对应的仪表参数;
[0048]
识别单元103,其用于识别所述仪表图像,并基于方向传感器107获得角度偏转量;
[0049]
以及计算单元104,用于根据所述角度偏转量和所述仪表参数,计算仪表的读数值。
[0050]
在进一步的示出实施方案中,上述比较单元102还用于当采集的仪表图像与预设仪表库中的仪表图像不相同时,采集目标仪表的仪表参数并保存于预设仪表库中。
[0051]
具体的,采集的仪表参数包括仪表读数下限刻度值、仪表读数上限刻度值、仪表读数上限刻度值对应的角度偏转量和仪表读数下限刻度值对应的角度偏转量。
[0052]
在一种示出实施方案中,计算单,104计算仪表的读数值包括:根据所述角度偏转量和所述仪表参数,基于如下公式计算仪表的读数值:
[0053][0054]
其中,y代表仪表的读数值,y0代表仪表读数下限刻度值,y
max
代表仪表读数上限刻度值,α
max
代表仪表读数上限刻度值对应的角度偏转量,α0代表仪表读数下限刻度值对应的
角度偏转量。
[0055]
参考附图3,在一种示出实施方案中,识别单元103采用如下方式识别仪表图像,获得角度偏转量:
[0056]
在智能终端的屏幕108上生成虚拟基准线;
[0057]
当所述虚拟基准线与所述仪表图像中刻度线或指针的重合度达到预设阈值时,获得当前刻度线或指针对应的角度偏转量。
[0058]
本实施例中,识别单元基于opencv的数字和霍夫直线变换识别算法,识别所述仪表图像。具体识别方法已存在于现有的公开资料中,在此不作具体说明。
[0059]
参考附图2和3,本发明的另一实施例还提供了一种基于智能终端的指针式仪表识别方法,包括如下步骤:
[0060]
采集目标仪表的仪表图像;
[0061]
若所述仪表图像与预设仪表库中的仪表图像相同,则获取该仪表图像对应的仪表参数;
[0062]
识别所述仪表图像,获得角度偏转量;
[0063]
根据所述角度偏转量和所述仪表参数,计算仪表的读数值。
[0064]
在进一步的示出实施方案中,若仪表图像与预设仪表库中的仪表图像不相同,则采集目标仪表的仪表参数并保存于预设仪表库中。
[0065]
具体采集的仪表参数包括仪表读数下限刻度值、仪表读数上限刻度值、仪表读数上限刻度值对应的角度偏转量和仪表读数下限刻度值对应的角度偏转量。
[0066]
上述仪表参数一经采集,可永久保存,下次识别同类型仪表时,就不需要再进行采集。数据本身可以缓存本地,在办公网络闲时可以上传服务器即可,对网络要求不高,不要求全厂配置高速网络,也不用采用sim卡和外网映射的方法访问内网,维护和运营成本较低。同时,其它智能终端可以从网络获取上述仪表参数,避免再次采集的步骤。
[0067]
在一种示出实施方案中,根据角度偏转量和仪表参数,基于如下公式计算仪表的读数值:
[0068][0069]
其中,y代表仪表的读数值,y0代表仪表读数下限刻度值,y
max
代表仪表读数上限刻度值,α
max
代表仪表读数上限刻度值对应的角度偏转量,α0代表仪表读数下限刻度值对应的角度偏转量。
[0070]
参考附图3,在一种示出实施方案中,识别仪表图像,获得角度偏转量的具体步骤为:
[0071]
在智能终端的屏幕上生成虚拟基准线;
[0072]
当所述虚拟基准线与仪表图像中刻度线或指针的重合度达到预设阈值时,获得当前刻度线或指针对应的角度偏转量。
[0073]
作为优选实施方案,本实施例中,基于opencv的数字和霍夫直线变换识别算法,识别所述仪表图像。
[0074]
通常,图像识别方法依赖服务器算力和网络,服务器和网络越强,执行效率越高,一般的中小型企业很难满足。本发明的方法采用不依赖服务器算力的方式,识别算法比较
常用,而且仅用到数字单独识别和直线识别两种算法,不用对仪表进行全盘识别,算力要求低,手机算力就能满足。如下表1为现有的图像识别算法和本发明的方法识别耗时对比表。
[0075]
操作步骤图像识别方法(单位:s)本方法(单位:s)截取图像22(第一次)识别上下限值 6(第一次)上传图像2 获取初始化数值
ꢀꢀ
表盘识别1(未训练)0.5(训练后) 刻度识别1(未训练)0.5(训练后) 指针识别1(未训练)0.5(训练后)2(本地运算,耗时加倍)返回结果0.5 展示结果0.50.5总计8(6.5)10.5(2.5)
[0076]
不考虑天气、光照和网络的干扰,现有的图像识别方法的耗时为8秒(含初始化配置)和6.5秒(直接识别),其中6.5秒是图像训练后的结果。本发明的方法耗时为10.5秒(含初始化配置)和2.5秒(直接识别),其中2.5秒是对已识别仪表的耗时。对比下来,第一次识别仪表(含初始化配置)两种方法耗时基本相当,对已识别的仪表本方法优势明显。
[0077]
以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1