一种基于深度学习的物体姿态识别抓取的搬运机器人方法与流程
1.本发明涉及智能机器人抓取技术领域,特别涉及一种基于深度学习的物体姿态识别抓取的搬运机器人方法。
背景技术:
2.目前,形形色色的机器人开始走进工厂进行辅助生产,它们代替人类完成危险或反复的工作任务,显而易见的是,智能机器人并不会感到疲倦,只会遵循着已经训练好的神经网络或规则进行运作,优秀的智能机器人获得了工业的青睐,并大量运用于生产之中;
3.但是,目前大多数机器人只能实现较简单的工作任务,且在不能根据任务的不同及时切换相应的工作模式,导致工作效率低下,同时需要以员工与机器相结合才能顺利完成任务,浪费了大量的人力资源;
4.因此,本发明提供了一种基于深度学习的物体姿态识别抓取的搬运机器人方法,用于提前对不同的工作任务进行训练,提高了搬运机器人对物体的识别效率,同时在搬运过程中能够快速规划搬运路径以及抓取方式,在保证安全搬运物体的前提下,提高了对物品的搬运效率,节省了大量的人力物力。
技术实现要素:
5.本发明提供一种基于深度学习的物体姿态识别抓取的搬运机器人方法,用以通过提前对不同的工作任务进行训练,提高了搬运机器人对物体的识别效率,同时在搬运过程中能够快速规划搬运路径以及抓取方式,在保证安全搬运物体的前提下,提高了对物品的搬运效率,节省了大量的人力物力。
6.本发明提供了一种基于深度学习的物体姿态识别抓取的搬运机器人方法,包括:
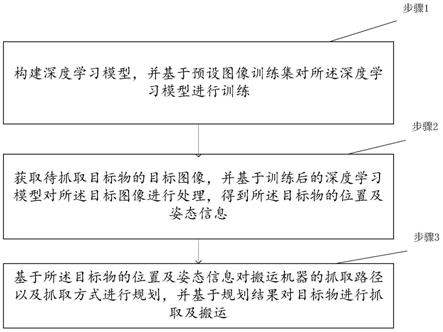
7.步骤1:构建深度学习模型,并基于预设图像训练集对所述深度学习模型进行训练;
8.步骤2:获取待抓取目标物的目标图像,并基于训练后的深度学习模型对所述目标图像进行处理,得到所述目标物的位置及姿态信息;
9.步骤3:基于所述目标物的位置及姿态信息对搬运机器的抓取路径以及抓取方式进行规划,并基于规划结果对目标物进行抓取及搬运。
10.优选的,一种基于深度学习的物体姿态识别抓取的搬运机器人方法,步骤1中,构建深度学习模型,并基于预设图像训练数据集对所述深度学习模型进行训练,包括:
11.构建深度学习模型,同时,获取预设图像训练集,并对所述预设图像训练集中每一预设图像的待检测目标在所述预设图像中进行位置标注,得到所述待检测目标在预设图像中的坐标信息;
12.基于所述坐标信息提取所述待检测目标在所述预设图像中的姿态特征,同时,获取管理终端对所述深度学习模型的预设条件,其中,所述预设条件为要求所述深度学习模型对所述预设图像训练集进行姿态识别时,识别结果需要满足的条件;
13.基于所述姿态特征以及所述预设条件对所述深度学习模型进行训练。
14.优选的,一种基于深度学习的物体姿态识别抓取的搬运机器人方法,基于所述姿态特征以及所述预设条件对所述深度学习模型进行训练,包括:
15.获取训练后的深度学习模型,同时,获取历史物体姿态图像,其中,所述历史物体姿态图像为多张,且每一张能够明显表明物体当前所处姿态;
16.将所述历史物体姿态图像输入训练后的深度学习模型,得到所述训练后的深度学习模型对所述历史物体姿态图像识别的准确率;
17.将所述准确率与预设准确率进行比较;
18.若所述准确率大于或等于所述预设准确率,判定对深度学习模型的训练合格;
19.否则,判定对深度学习模型的训练不合格,并重新对所述深度学习模型进行训练,直至所述准确率大于或等于所述预设准确率。
20.优选的,一种基于深度学习的物体姿态识别抓取的搬运机器人方法,步骤1中,构建深度学习模型,并基于预设图像训练数据集对所述深度学习模型进行训练,还包括:
21.获取训练后的深度学习模型,并实时获取所述训练后的深度学习模型的运行数据,其中,所述运行数据包括对待分析图像的识别结果;
22.基于所述识别结果判断所述训练后的深度学习模型在对待分析图像进行识别时,是否存在对新的物体姿态识别失败现象;
23.若存在,将所述新的物体姿态对应的待分析图像存储至数据更新库,并基于所述数据更新库对所述深度学习模型进行数据更新;
24.否则,确定所述深度学习模型识别工作正常。
25.优选的,一种基于深度学习的物体姿态识别抓取的搬运机器人方法,步骤2中,获取待抓取目标物的目标图像,并基于训练后的深度学习模型对所述目标图像进行处理,得到所述目标物的位置及姿态信息,包括:
26.基于预设摄像头获取所述目标物的目标图像,并将所述目标图像分为参考集与待修正集,其中,所述目标图像至少为两张;
27.基于参考集中的参考图像与待修正集中的待修正图像的交叉熵的峰值坐标获取还原位移量,并基于所述还原位移量对所述待修正图像进行位移,得到位移修正图像;
28.基于所述位移修正图像与所述待修正图像的重叠部分及参考图像中与重叠部分对应的部分以外的其他部分形成目标修正图像,并确定所述目标修正图像中每个像素灰度值的平均值;
29.基于预设方法通过所述每个像素灰度值的平均值得到所述目标修正图像中每个像素灰度值对应的色彩值,并将每个像素灰度值对应的色彩值与对应的预设色彩值进行比较;
30.若所述色彩值与所述预设色彩值不一致,基于所述预设色彩值确定当前像素灰度值对应的色彩修正值,并基于所述色彩修正值对当前像素灰度值对应的色彩值进行修正,得到目标待识别图像;
31.基于所述深度学习模型,提取所述目标待识别图像中的目标参考物,并将所述目标物及所述目标参考物所处场地网格化;
32.基于网格化的场地确定所述目标参考物的第一坐标信息,同时确定所述目标物在
所述网格化的场地中的第二坐标信息;
33.基于所述第一坐标信息以及所述第二坐标信息确定所述目标参考物与所述目标物之间的方向及距离,并根据预设方法计算得到所述目标物的位置信息;
34.同时,基于所述深度学习模型,提取所述目标待识别图像中目标物,并将所述目标待识别图像中的目标物与背景进行分割,得到目标物主体图像以及背景图像;
35.将所述目标物主体图像进行去噪处理,并将去噪处理后的目标物主体图像输入所述深度学习模型进行分析,得到所述目标物的姿态信息,其中,所述姿态信息包括目标物的朝向以及摆放角度。
36.优选的,一种基于深度学习的物体姿态识别抓取的搬运机器人方法,得到所述目标物的姿态信息,还包括:
37.获取所述目标物的位置信息及姿态信息,同时确定搬运机器人对待识别数据的预设格式要求;
38.基于所述预设格式要求将所述目标物的位置信息及姿态信息进行格式转换,并将转换后的目标物的位置信息及姿态信息分别放置于对应的数据传输队列;
39.基于目标物的位置信息及姿态信息在数据传输队列中的排列顺序,依次将所述目标物的位置信息及姿态信息传输至搬运机器人终端。
40.优选的,一种基于深度学习的物体姿态识别抓取的搬运机器人方法,步骤3中,基于所述目标物的位置及姿态信息对搬运机器的抓取路径以及抓取方式进行规划,并基于规划结果对目标物进行抓取及搬运,包括:
41.获取所述目标物的位置信息以及所述搬运机器人的当前位置信息,并基于所述目标物的位置信息以及所述搬运机器人的当前位置信息构建搬运机器人与所述目标物之间的距离矩阵;
42.基于预设方法通过所述距离矩阵确定所述搬运机器人行驶至所述目标物的初始规划路径,其中,所述初始规划路径至少为两条;
43.获取所述搬运机器人的行驶速度,并基于所述行驶速度确定所述初始规划路径的用时信息,且将用时最短的初始规划路径确定为目标抓取路径;
44.所述搬运机器人基于所述目标抓取路径行驶至所述目标物位置,并基于所述目标物的姿态信息对所述目标物进行可抓取点分析,得到所述目标物上对应的可抓取点指标信息;
45.基于所述可抓取点指标信息确定目标抓取点,并基于所述目标抓取点在所述目标物上的分布特征确定所述搬运机器人的抓取角度;
46.基于所述抓取角度对所述搬运机器人的各关节伸展角度进行确定,得到所述搬运机器人的目标抓取姿态;
47.基于所述目标抓取姿态控制所述搬运机器人对所述目标物进行抓取,同时获取对所述目标物的预设放置点的坐标信息;
48.基于所述预设放置点的坐标信息控制所述搬运机器人将所述目标物搬运至预设放置点,完成对所述目标物的抓取及搬运。
49.优选的,一种基于深度学习的物体姿态识别抓取的搬运机器人方法,基于所述目标抓取姿态控制所述搬运机器人对所述目标物进行抓取,包括:
50.获取所述搬运机器人抓取所述目标物的抓取数据,其中,所述抓取数据包括搬运机器人对所述目标物施加的抓力;
51.获取所述目标物的质量信息,并基于预设计算方法确定所述目标物被抓取所需的最小抓力;
52.将所述搬运机器人对所述目标物施加的抓力与所述目标物被抓取所需的最小抓力进行比较;
53.若所述搬运机器人对所述目标物施加的抓力小于所述目标物被抓取所需的最小抓力,判定所述搬运机器人不能将所述目标物成功抓取,并对所述搬运机器人的运行功率进行调整,直至搬运机器人对所述目标物施加的抓力大于或等于所述目标物被抓取所需的最小抓力;
54.否则,判定所述搬运机器人能将所述目标物成功抓取。
55.优选的,一种基于深度学习的物体姿态识别抓取的搬运机器人方法,基于所述预设放置点的坐标信息控制所述搬运机器人将所述目标物搬运至预设放置点,包括:
56.基于预设照相机获取所述目标物被放置在所述预设放置点的放置图像,其中,所述放置图像包括所述目标物的外表情况;
57.获取所述目标物被抓取前的原始物体图像,将所述放置图像与所述原始物体图像进行对比,并基于对比结果判断所述搬运机器人在对所述目标物抓取过程中是否对所述目标物造成损坏;
58.若所述原始物体图像与放置图像中目标物表面情况发生改变,则判定所述搬运机器人对所述目标物造成损坏;
59.否则,判定所述搬运机器人未对所述目标物造成损坏,且所述目标物完好。
60.优选的,一种基于深度学习的物体姿态识别抓取的搬运机器人方法,判定所述搬运机器人对所述目标物造成损坏,包括:
61.获取所述目标物被放置在所述预设放置点的放置图像,并基于所述放置图像确定所述目标物被损坏的程度信息以及损坏位置的具体位置信息;
62.基于预设数据传输方法将所述目标物被损坏的程度信息以及损坏位置的具体位置信息发送至管理者终端进行提醒。
63.本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
64.下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
65.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
66.图1为本发明实施例中一种基于深度学习的物体姿态识别抓取的搬运机器人方法的流程图;
67.图2为本发明实施例中一种基于深度学习的物体姿态识别抓取的搬运机器人方法中步骤1的第一流程图;
68.图3为本发明实施例中一种基于深度学习的物体姿态识别抓取的搬运机器人方法中步骤1的第二流程图。
具体实施方式
69.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
70.实施例1:
71.本实施例提供了一种基于深度学习的物体姿态识别抓取的搬运机器人方法,如图1所述,包括:
72.步骤1:构建深度学习模型,并基于预设图像训练集对所述深度学习模型进行训练;
73.步骤2:获取待抓取目标物的目标图像,并基于训练后的深度学习模型对所述目标图像进行处理,得到所述目标物的位置及姿态信息;
74.步骤3:基于所述目标物的位置及姿态信息对搬运机器的抓取路径以及抓取方式进行规划,并基于规划结果对目标物进行抓取及搬运。
75.该实施例中,深度学习模型指的是实现对获取的样本数据进行训练,学习样本数据的内在规律和表示层次,从而运用到相应的机器工作过程,此处指的是对待抓取的物体样本数据进行训练,确保搬运机器人在工作过程中能够准确识别待抓取物体的位置以及姿态信息,从而提高工作效率。
76.该实施例中,预设图像训练集是提前获取的,是已经知道待搬运物体的位置信息以及姿态信息的物体图像。
77.该实施例中,目标物指的是搬运机器人在工作过程中需要抓取以及搬运的物体,例如可以是箱子、家具等。
78.该实施例中,目标图像指的是通过图像获取工作对目标物当前状态进行拍照后得到的图像。
79.该实施例中,姿态信息指的是目标物的朝向,目标物的外表情况等。
80.该实施例中,抓取路径指的是搬运机器人从当前位置运动至目标物所处位置的路径。
81.上述技术方案的有益效果是:通过提前对不同的工作任务进行训练,提高了搬运机器人对物体的识别效率,同时在搬运过程中能够快速规划搬运路径以及抓取方式,在保证安全搬运物体的前提下,提高了对物品的搬运效率,节省了大量的人力物力。
82.实施例2:
83.在上述实施例1的基础上,本实施例提供了一种基于深度学习的物体姿态识别抓取的搬运机器人方法,如图2所示,步骤1中,构建深度学习模型,并基于预设图像训练数据集对所述深度学习模型进行训练,包括:
84.步骤101:构建深度学习模型,同时,获取预设图像训练集,并对所述预设图像训练集中每一预设图像的待检测目标在所述预设图像中进行位置标注,得到所述待检测目标在预设图像中的坐标信息;
85.步骤102:基于所述坐标信息提取所述待检测目标在所述预设图像中的姿态特征,
同时,获取管理终端对所述深度学习模型的预设条件,其中,所述预设条件为要求所述深度学习模型对所述预设图像训练集进行姿态识别时,识别结果需要满足的条件;
86.步骤103:基于所述姿态特征以及所述预设条件对所述深度学习模型进行训练。
87.该实施例中,预设图像是预设图像训练集中的一张或多张。
88.该实施例中,待检测目标指的是预设图像中对应的待抓取及搬运的物品。
89.该实施例中,坐标信息是用于表明待检测目标在预设图像中的位置信息,便于对深度学习模型进行训练。
90.该实施例中,姿态特征指的是待检测目标在预设图像中呈现的朝向、物体表面情况以及物体的材质等信息。
91.该实施例中,预设条件可以是要求深度模型对待检测目标识别时必须识别的项目,例如必须识别物体的材质以及物体的朝向情况。
92.上述技术方案的有益效果是:通过获取预设图像训练集,并通过预设图像训练集中每一张预设图像中的待检测目标的姿态特征对构建的深度学习模型进行训练,提高了搬运机器在工作过程中对目标物的识别效率以及准确度,从而便于提高工作效率。
93.实施例3:
94.在上述实施例2的基础上,本实施例提供了一种基于深度学习的物体姿态识别抓取的搬运机器人方法,其特征在于,基于所述姿态特征以及所述预设条件对所述深度学习模型进行训练,包括:
95.获取训练后的深度学习模型,同时,获取历史物体姿态图像,其中,所述历史物体姿态图像为多张,且每一张能够明显表明物体当前所处姿态;
96.将所述历史物体姿态图像输入训练后的深度学习模型,得到所述训练后的深度学习模型对所述历史物体姿态图像识别的准确率;
97.将所述准确率与预设准确率进行比较;
98.若所述准确率大于或等于所述预设准确率,判定对深度学习模型的训练合格;
99.否则,判定对深度学习模型的训练不合格,并重新对所述深度学习模型进行训练,直至所述准确率大于或等于所述预设准确率。
100.该实施例中,历史物体姿态图像是提前获取的,且已经明确报名物体的姿态情况,同时也能被深度学习模型进行准确识别过的物体姿态图像。
101.该实施例中,预设准确率是提前设定好的,用于衡量深度学习模型对目标物的姿态信息的识别准确率是否达到预期要求,且该预设准确率是可以调整的。
102.该实施例中,将所述历史物体姿态图像输入训练后的深度学习模型,得到所述训练后的深度学习模型对所述历史物体姿态图像识别的准确率,包括:
103.获取所述历史物体姿态图像的总数量,并基于所述历史物体姿态图像的总数量计算所述训练后的深度学习模型对所述历史物体姿态图像识别的实际准确率,具体步骤包括:
104.根据如下公式计算所述训练后的深度学习模型对所述历史物体姿态图像识别的实际准确率:
[0105][0106]
其中,η表示所述训练后的深度学习模型对所述历史物体姿态图像识别的实际准确率,且取值范围为[0,1);μ表示误差因子,且取值范围为(0.05,0.15);α表示所述训练后的深度学习模型对所述历史物体姿态图像识别的灵敏度系数,且取值范围为(0.85,0.95);m表示所述历史物体姿态图像的总数量;n表示所述训练后的深度学习模型未对所述历史物体姿态图像进行准确识别的图像数量;
[0107]
将计算得到的所述实际准确率与预设准确率进行比较;
[0108]
若所述实际准确率大于或等于所述预设准确率,判定对所述深度学习模型的训练合格,并完成对所述深度学习模型的训练;
[0109]
否则,判定对所述深度学习模型的训练不合格,同时获取所述训练后的深度模型未准确识别的历史物体姿态图像,并提取所述未准确识别的历史物体姿态图像中各物体的目标姿态特征;
[0110]
基于所述目标姿态特征对所述深度学习模型再次进行训练,并在训练完成后重新计算所述深度学习模型对所述历史物体姿态图像识别的准确率,直至所述实际准确率大于或等于所述预设准确率。
[0111]
上述目标姿态特征指的是训练后的深度学习模型对未准确识别的历史物体姿态图像中的物体的摆放角度、外表形态等。
[0112]
上述公式中,当n《m时,若μ取值为0.1,α取值为0.9,m取值为100,n取值为10,则计算得到的η为72.9%。
[0113]
上述技术方案的有益效果是:通过对训练后的深度学习模型进行识别准确率检测,确保深度学习模型能够准确对物体的姿态以及位置进行准确检测,且确保了搬运机器人基于深度学习模型对目标物的识别及抓取的准确率,为提高搬运机器人的工作效率提供了保障。
[0114]
实施例4:
[0115]
在上述实施例1的基础上,本实施例提供了一种基于深度学习的物体姿态识别抓取的搬运机器人方法,如图3所示,步骤1中,构建深度学习模型,并基于预设图像训练数据集对所述深度学习模型进行训练,还包括:
[0116]
步骤111:获取训练后的深度学习模型,并实时获取所述训练后的深度学习模型的运行数据,其中,所述运行数据包括对待分析图像的识别结果;
[0117]
步骤112:基于所述识别结果判断所述训练后的深度学习模型在对待分析图像进行识别时,是否存在对新的物体姿态识别失败现象;
[0118]
步骤113:若存在,将所述新的物体姿态对应的待分析图像存储至数据更新库,并基于所述数据更新库对所述深度学习模型进行数据更新;
[0119]
步骤114:否则,确定所述深度学习模型识别工作正常。
[0120]
该实施例中,运行数据指的是深度学习模型在对目标物的目标图像识别过程中,对目标图像的识别情况。
[0121]
该实施例中,新的物体姿态指的是在对深度学习模型进行训练时,为涉及到的物体姿态情况。
[0122]
该实施例中,数据更新库是用来记录深度模型未能准确识别的物体姿态信息,便于对深度学习模型进行更新。
[0123]
上述技术方案的有益效果是:通过实时检测深度学习模型的运行数据,及时查看是否存在新的物体姿态未能准确识别的情况发生,提高了对深度学习模型进行更新的效率,确保了深度学习模型对物体姿态识别的准确率,即确保了搬运机器人对物体识别及抓取的效率。
[0124]
实施例5:
[0125]
在上述实施例1的基础上,本实施例提供了一种基于深度学习的物体姿态识别抓取的搬运机器人方法,步骤2中,获取待抓取目标物的目标图像,并基于训练后的深度学习模型对所述目标图像进行处理,得到所述目标物的位置及姿态信息,包括:
[0126]
基于预设摄像头获取所述目标物的目标图像,并将所述目标图像分为参考集与待修正集,其中,所述目标图像至少为两张;
[0127]
基于参考集中的参考图像与待修正集中的待修正图像的交叉熵的峰值坐标获取还原位移量,并基于所述还原位移量对所述待修正图像进行位移,得到位移修正图像;
[0128]
基于所述位移修正图像与所述待修正图像的重叠部分及参考图像中与重叠部分对应的部分以外的其他部分形成目标修正图像,并确定所述目标修正图像中每个像素灰度值的平均值;
[0129]
基于预设方法通过所述每个像素灰度值的平均值得到所述目标修正图像中每个像素灰度值对应的色彩值,并将每个像素灰度值对应的色彩值与对应的预设色彩值进行比较;
[0130]
若所述色彩值与所述预设色彩值不一致,基于所述预设色彩值确定当前像素灰度值对应的色彩修正值,并基于所述色彩修正值对当前像素灰度值对应的色彩值进行修正,得到目标待识别图像;
[0131]
基于所述深度学习模型,提取所述目标待识别图像中的目标参考物,并将所述目标物及所述目标参考物所处场地网格化;
[0132]
基于网格化的场地确定所述目标参考物的第一坐标信息,同时确定所述目标物在所述网格化的场地中的第二坐标信息;
[0133]
基于所述第一坐标信息以及所述第二坐标信息确定所述目标参考物与所述目标物之间的方向及距离,并根据预设方法计算得到所述目标物的位置信息;
[0134]
同时,基于所述深度学习模型,提取所述目标待识别图像中目标物,并将所述目标待识别图像中的目标物与背景进行分割,得到目标物主体图像以及背景图像;
[0135]
将所述目标物主体图像进行去噪处理,并将去噪处理后的目标物主体图像输入所述深度学习模型进行分析,得到所述目标物的姿态信息,其中,所述姿态信息包括目标物的朝向以及摆放角度。
[0136]
该实施例中,预设摄像头是提前设置的,用于采集搬运机器人将要识别搬运的物体的图像信息。
[0137]
该实施例中,参考集指的是将采集到的图像中的一部分作为参考,便于对另一部
分图像进行优化处理。
[0138]
该实施例中,待修正集指的是将采集到的物体图像中的一部分图像进行处理的图像,通过对该图像进行处理,确保搬运机器人对物体的识别准确率。
[0139]
该实施例中,交叉熵是用于确定两张图形中存在差异信息的程度。
[0140]
该实施例中,还原位移量指的是两张图片在不同角度下位置偏移程度。
[0141]
该实施例中,位移修正图像指的是对待修正图像中的目标物的位置继续宁修正后得到的图像。
[0142]
该实施例中,基于所述位移修正图像与所述待修正图像的重叠部分及参考图像中与重叠部分对应的部分以外的其他部分形成目标修正图像指的是将三这种涉及到目标物体的图像进行重新组合修正,得到能够用于识别物体姿态的图像。
[0143]
该实施例中,预设方法是提前设定好的,例如可以是采用色彩分析仪进行获取。
[0144]
该实施例中,色彩值指的是每个像素点对应的颜色取值情况。
[0145]
该实施例中,预设色彩值是提前设定好的,用于衡量每个像素的色彩值是否达到预期要求。
[0146]
该实施例中,色彩修正值指的是每个像素点当前的色数值与对应的预设色素值之间的差值。
[0147]
该实施例中,目标参考物指的是目标待识别图像中能够为确定目标物的位置信息提供参考依据的物体,例如场地中的柱子或具有显著特征的标记物。
[0148]
该实施例中,网格化指的是将场地划分为多个网格块,例如可以是8*8等。便于确定物体在场地中的坐标信息。
[0149]
上述技术方案的有益效果是:通过对获取的目标图像进行位置以及色彩处理,确保得到的图像能够被搬运机器人准确识别,减少识别的误差,其次通过对目标图像进行分析,确定目标物在场地中的位置信息以及姿态信息,提高了搬运机器人对物体位置以及姿态信息识别的准确率,为确保搬运机器人能够准确采取相应的抓取方式以及抓取路径提供了保障,为提高搬运机器人的工作效率提供了便利。
[0150]
实施例6:
[0151]
在上述实施例5的基础上,本实施例提供了一种基于深度学习的物体姿态识别抓取的搬运机器人方法,得到所述目标物的姿态信息,还包括:
[0152]
获取所述目标物的位置信息及姿态信息,同时确定搬运机器人对待识别数据的预设格式要求;
[0153]
基于所述预设格式要求将所述目标物的位置信息及姿态信息进行格式转换,并将转换后的目标物的位置信息及姿态信息分别放置于对应的数据传输队列;
[0154]
基于目标物的位置信息及姿态信息在数据传输队列中的排列顺序,依次将所述目标物的位置信息及姿态信息传输至搬运机器人终端。
[0155]
该实施例中,待识别数据指的是搬运机器人在识别物体位置以及姿态时所需的数据。
[0156]
该实施例中,预设格式要求是提前设定好的,便于搬运机器人对数据进行准确快速的识别。
[0157]
该实施例中,数据传输队列指的是用于传输数据的一种传输方式,便于将数据有
序的传输至搬运机器人终端。
[0158]
上述技术方案的有益效果是:通过将识别到的物体位置信息以及姿态信息进行格式转换并传输,确保了搬运机器人对数据的识别准确率,从而提高了对抓取路径以及抓取方式规划的及时性,为确保搬运机器人的工作效率提供了便利。
[0159]
实施例7:
[0160]
在上述实施例1的基础上,本实施例提供了一种基于深度学习的物体姿态识别抓取的搬运机器人方法,步骤3中,基于所述目标物的位置及姿态信息对搬运机器的抓取路径以及抓取方式进行规划,并基于规划结果对目标物进行抓取及搬运,包括:
[0161]
获取所述目标物的位置信息以及所述搬运机器人的当前位置信息,并基于所述目标物的位置信息以及所述搬运机器人的当前位置信息构建搬运机器人与所述目标物之间的距离矩阵;
[0162]
基于预设方法通过所述距离矩阵确定所述搬运机器人行驶至所述目标物的初始规划路径,其中,所述初始规划路径至少为两条;
[0163]
获取所述搬运机器人的行驶速度,并基于所述行驶速度确定所述初始规划路径的用时信息,且将用时最短的初始规划路径确定为目标抓取路径;
[0164]
所述搬运机器人基于所述目标抓取路径行驶至所述目标物位置,并基于所述目标物的姿态信息对所述目标物进行可抓取点分析,得到所述目标物上对应的可抓取点指标信息;
[0165]
基于所述可抓取点指标信息确定目标抓取点,并基于所述目标抓取点在所述目标物上的分布特征确定所述搬运机器人的抓取角度;
[0166]
基于所述抓取角度对所述搬运机器人的各关节伸展角度进行确定,得到所述搬运机器人的目标抓取姿态;
[0167]
基于所述目标抓取姿态控制所述搬运机器人对所述目标物进行抓取,同时获取对所述目标物的预设放置点的坐标信息;
[0168]
基于所述预设放置点的坐标信息控制所述搬运机器人将所述目标物搬运至预设放置点,完成对所述目标物的抓取及搬运。
[0169]
该实施例中,预设方法可以是蚁群算法。
[0170]
该实施例中,搬运机器人的当前位置信息指的是搬运机器人的待命位置。
[0171]
该实施例中,距离矩阵是用于确定搬运机器人与目标物之间距离的一种计算方式。
[0172]
该实施例中,初始规划路径指的是能够从搬运机器人当前位置到目标物所述位置的所有通路。
[0173]
该实施例中,目标抓取路径指的是搬运机器人能够快速到达目标物所述位置对应的路径。
[0174]
该实施例中,可抓取点分析指的是确定目标物表面能够施加抓取力的作用点,通过该点可以实现对目标物的抓取。
[0175]
该实施例中,可抓取点的指标信息指的是可抓取点在目标物上的位置以及该点能够承受的最大抓取力。
[0176]
该实施例中,目标抓取点是从可抓取点中挑选出的,是最有利于对目标物进行抓
取的点。
[0177]
该实施例中,各关节伸展角度指的是搬运机器人的抓取臂有多个不同的机械硬件组成,伸展角度即为每一个机械硬件在抓取过程中需要弯曲或变化的角度值。
[0178]
该实施例中,目标抓取姿态指的是搬运机器人在对目标物进行抓取时需要摆出的抓取姿势。
[0179]
该实施例中,预设放置点是提前设定好的,用于将抓取的目标物进行安置的区域。
[0180]
该实施例中,获取所述搬运机器人的行驶速度,并基于所述行驶速度确定所述初始规划路径的用时信息,且将用时最短的初始规划路径确定为目标抓取路径,包括:
[0181]
获取所述搬运机器人的行驶速度,并基于所述行驶速度计算所述搬运机器人在所述初始规划路径上行驶的时间长度值,具体步骤包括:
[0182]
根据如下公式计算所述搬运机器人在所述初始规划路径上行驶的时间长度值:
[0183][0184]
其中,t表示所述搬运机器人在所述初始规划路径上行驶的时间长度值;i表示所述初始规划路径中当前直线路段个数,且取值范围为[1,n];q表示所述初始规划路径中直线路段的总个数;si表示所述初始规划路径中第i段直线路段的长度值;k表示所述初始规划路径中当前拐弯路段个数,且取值范围为[1,g];g表示所述初始规划路径中拐弯路段的总个数;rk表示所述初始规划路径中第k段拐弯路段的拐弯半径值;qk表示所述初始规划路径中第k段拐弯路段的弯度占当前拐弯圆的比例;v1表示所述搬运机器人在平坦路段的行驶速度;v2表示所述搬运机器人在上坡路段的行驶速度;v3表示所述搬运机器人在下坡路段的行驶速度;
[0185]
基于计算得到的时间长度值对所述初始规划路径进行筛选,并将所述时间长度值最小的初始规划路径作为所述搬运机器人的目标抓取路径。
[0186]
上述拐弯圆指的是搬运小车在拐弯时,以拐弯中心为圆心,拐弯半径为半径形成的圆。
[0187]
上述公式中,若q取值为3,s1取值为10,s2取值为15,s3取值为5,g取值为3,r1取值为5,r2取值为8,r3取值为3,v1取值为2,v2取值为1,v3取值为4,q1取值为1/4,q2取值为1/6,q3取值为1/5,则计算得到的t为25。
[0188]
上述技术方案的有益效果是:通过对目标物抓取路径以及抓取方式进行规划,有利于准确对目标物进行安全有效的抓取,同时,能够将抓取到的目标物准确放置在预设区域,实现了对目标物的抓取效率以及抓取安全性,提高了对物品的搬运效率,节省了大量的人力物力。
[0189]
实施例8:
[0190]
在上述实施例7的基础上,本实施例提供了一种基于深度学习的物体姿态识别抓取的搬运机器人方法,基于所述目标抓取姿态控制所述搬运机器人对所述目标物进行抓取,包括:
[0191]
获取所述搬运机器人抓取所述目标物的抓取数据,其中,所述抓取数据包括搬运机器人对所述目标物施加的抓力;
[0192]
获取所述目标物的质量信息,并基于预设计算方法确定所述目标物被抓取所需的最小抓力;
[0193]
将所述搬运机器人对所述目标物施加的抓力与所述目标物被抓取所需的最小抓力进行比较;
[0194]
若所述搬运机器人对所述目标物施加的抓力小于所述目标物被抓取所需的最小抓力,判定所述搬运机器人不能将所述目标物成功抓取,并对所述搬运机器人的运行功率进行调整,直至搬运机器人对所述目标物施加的抓力大于或等于所述目标物被抓取所需的最小抓力;
[0195]
否则,判定所述搬运机器人能将所述目标物成功抓取。
[0196]
该实施例中,抓取数据指的是搬运机器人在对目标物进行抓取时施加的力度以及需要提供的动力等。
[0197]
该实施例中,抓力指的是搬运装置需要提供的抓取力度。
[0198]
该实施例中,预设计算方法可以是通过物力计算确定目标物被抓取时所需要的抓力。
[0199]
上述技术方案的有益效果是:通过将搬运机器人提供的抓力与目标物被成功抓取的最小抓力进行比较,有利于确保搬运装置对目标物进行牢固抓取,提高了对目标物抓取的安全性。
[0200]
实施例9:
[0201]
在上述实施例7的基础上,本实施例提供了一种基于深度学习的物体姿态识别抓取的搬运机器人方法,基于所述预设放置点的坐标信息控制所述搬运机器人将所述目标物搬运至预设放置点,包括:
[0202]
基于预设照相机获取所述目标物被放置在所述预设放置点的放置图像,其中,所述放置图像包括所述目标物的外表情况;
[0203]
获取所述目标物被抓取前的原始物体图像,将所述放置图像与所述原始物体图像进行对比,并基于对比结果判断所述搬运机器人在对所述目标物抓取过程中是否对所述目标物造成损坏;
[0204]
若所述原始物体图像与放置图像中目标物表面情况发生改变,则判定所述搬运机器人对所述目标物造成损坏;
[0205]
否则,判定所述搬运机器人未对所述目标物造成损坏,且所述目标物完好。
[0206]
该实施例中,预设照相机是提前设定好的,用于获取目标物被放置后的图像信息。
[0207]
该实施例中,原始物体图像指的是目标物在被抓取前的图像。
[0208]
上述技术方案的有益效果是:通过将目标物被抓取后的图像与被抓取前的图像进行比较,便于准确判断目标物是否被损坏,提高了搬运机器人对目标物搬运的严谨性,同时也确保了目标物的完整性,在确保物品完全的前提下,提高了搬运机器人的工作效率。
[0209]
实施例10:
[0210]
在上述实施例9的基础上,本实施例提供了一种基于深度学习的物体姿态识别抓取的搬运机器人方法,判定所述搬运机器人对所述目标物造成损坏,包括:
[0211]
获取所述目标物被放置在所述预设放置点的放置图像,并基于所述放置图像确定所述目标物被损坏的程度信息以及损坏位置的具体位置信息;
[0212]
基于预设数据传输方法将所述目标物被损坏的程度信息以及损坏位置的具体位置信息发送至管理者终端进行提醒。
[0213]
该实施例中,预设传输方法是提前设定好的,例如可以是网络传输等。
[0214]
上述技术方案的有益效果是:通过确定目标物被损坏的位置以及损坏的程度,并将其发送至管理者终端,便于管理者及时采取相应的补救措施,提高了物品搬运的效率以及对意外事故的处理效率。
[0215]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1