一种基于图像深度学习的海上目标识别系统的制作方法
1.本发明属于人工智能图像识别相关技术领域,具体涉及一种基于图像深度学习的海上目标识别系统。
背景技术:
2.目标识别技术是国防信息技术研究的重要问题之一,它对情报的收集和监控、武器制导领域具有重要的理论和应用价值。
3.随着深度学习理论的日益发展,深度神经网络被广泛的应用在目标检测中。然而目前用于检测目标的深度神经网络,在实时性要求较高的检测场景时,存在着实时性较差的问题,以及检测性能较差的问题。
技术实现要素:
4.(一)要解决的技术问题
5.本发明要解决的技术问题是:设计一种海上目标识别系统,以更快地识别出海上目标,满足态势评定与威胁评估的需要。
6.(二)技术方案
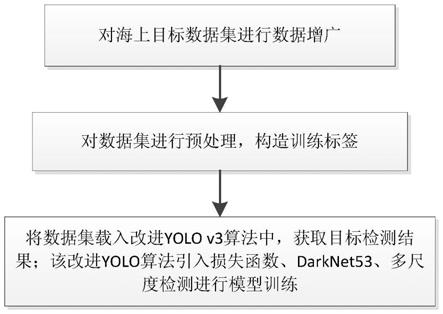
7.为了解决上述技术问题,本发明提供了一种基于图像深度学习的海上目标识别系统,包括以下步骤:
8.图像预处理模块,用于获取海上目标图像,分别形成样本集和预测集,对所述样本集进行图像预处理,并构造训练标签;
9.模型训练模块,用于将所述海上目标图像的训练标签输入改进的yolo v3识别模型中,训练得到海上目标识别模型;
10.目标检测模块,用于将海上目标图像的预测集,输入模型训练模块得到的海上目标识别模型中,进行目标检测,获得海上目标图像的属性信息,作为最终的目标检测结果;所述属性信息包括类别。
11.优选地,图像预处理模块对样本集进行图像预处理,并构造训练标签的方式具体为:
12.s1.1、搜集海上目标图像,将海上目标图像的样本集裁剪成固定大小;
13.s1.2、对所述样本集中的海上舰船进行目标框标注,目标框的信息参数包括:x_center、y_center、w、h,分别对应中心点横坐标、中心点纵坐标、目标框的宽、目标框的高,同时给出每个目标的分类,将标注后的信息存放在xml文件中;
14.s1.3、构造训练标签:利用yolo v3模型将一张图片分为s*s的网格,每个网格负责预测一个目标,每个预测目标的参数包含x_center、y_center、w、h、confidence、prob,每个目标框有n_anchor个先验框,所以最后输入训练标签的特征shape为[batch_size,s,s,n_anchor*(5+class)],其中batch_size为批尺寸,class为标准点,遍历所述xml文件,根据目标框中心坐标计算出网格的序号作为目标的索引,然后将网格的序号填充在xml文件里面。
[0015]
优选地,所述改进yolo v3识别模型是基于海上目标图像,对所述初始yolo v3模型进行解析而生成的,在基于yolov3网络的主干网络中,使用darknet53作为特征提取网络,其中添加残差网络;引进先验框,通过聚类的方式得到先验框,作为回归的参考。
[0016]
优选地,所述改进的yolo v3识别模型的卷积神经网络可对输入的训练集的海上目标图像进行不同大小的卷积运算,形成海上目标图像的不同尺度的特征度;卷积神经网络学习海上目标图像不同尺度的特征,实现对海上目标多个尺度的检测。
[0017]
优选地,将收集到的海上目标图像,输入到改进的yolo v3识别模型中,改进型的yolov3识别模型会预测三个不同大小的3d张量3dtensor,对应三个不同的规模scale。
[0018]
优选地,将待检测的海上目标图像,分成s*s的网格,每个网格预测c个矩形框以及所述矩形框的置信度;其中,s表示划分网格数;b表示每个网格负责的边框个数;选择置信度分数值最大的海上目标先验边界框,通过逻辑回归函数对待检测的海上目标图像的位置进行预测。
[0019]
优选地,所述改进的yolo v3识别模型的预测输出是海上目标网格的单元坐标、预测前边界框的宽、高;改进的yolo v3识别模型使用逻辑回归的方法预测每个边界框的分数。
[0020]
优选地,在所述改进的yolo v3识别模型中,构建损失函数作为度量预测值与真实值之间误差的评判标准。
[0021]
优选地,对于海上目标的坐标,所述损失函数采用误差平方和损失函数,置信度以及类别采用二元交叉熵损失函数,在3种不同的规模上预测,且每种规模预测3个候选目标框;
[0022]
优选地,所述改进的yolo v3识别模型训练时,batch_size选择为8张,优化器选择adam优化器。
[0023]
(三)有益效果
[0024]
为快速准确的识别出海上目标,满足态势评定与威胁评估的需要,为指挥决策提供重要依据,本发明提供的一种基于图像深度学习的海上目标识别系统。对比传统海上识别目标的方式,本发明技术方案的准确性、时效性、智能化程度都得到了极大提高。
附图说明
[0025]
图1为本发明中海上目标识别模型的主要网络结构图;
[0026]
图2为本发明中改进型yolo v3识别模型损失函数图;
[0027]
图3为本发明中模型训练过程的scale记录图;
[0028]
图4为本发明中模型验证的预测输入图;
[0029]
图5为本发明中模型验证的预测结果图。
具体实施方式
[0030]
为使本发明的目的、内容、和优点更加清楚,下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。
[0031]
为快速准确的识别出海上目标,满足态势评定与威胁评估的需要,为指挥决策提供重要依据,本发明提供的一种基于图像深度学习的海上目标识别系统,参考图1,包括:
[0032]
图像预处理模块,用于获取海上目标图像,分别形成样本集和预测集,对所述样本集进行图像预处理,并构造训练标签;其中,对样本集进行图像预处理,并构造训练标签具体包括:
[0033]
s1.1、搜集海上目标图像,将海上目标图像的样本集裁剪成固定大小;
[0034]
s1.2、对所述样本集中的海上舰船进行目标框标注,目标框的信息参数包括:x_center、y_center、w、h,分别对应中心点横坐标、中心点纵坐标、目标框的宽、目标框的高,同时给出每个目标的分类,将标注后的信息存放在xml文件中,便于后续程序读取;
[0035]
s1.3、构造训练标签:利用yolo v3模型将一张图片分为s*s的网格,每个网格负责预测一个目标,每个预测目标的参数包含x_center、y_center、w、h、confidence、prob,每个目标框有n_anchor个先验框,所以最后输入训练标签的特征shape为[batch_size,s,s,n_anchor*(5+class)],其中batch_size为批尺寸,class为标准点,可以遍历所述xml文件,根据目标框中心坐标计算出网格的序号作为目标的索引,然后将网格的序号填充在xml文件里面;
[0036]
模型训练模块,用于将所述海上目标图像的训练标签输入改进的yolo v3识别模型中,训练得到海上目标识别模型;
[0037]
其中,所述改进yolo v3网络是基于海上目标图像,对所述初始yolo v3模型进行解析而生成的,基于yolov3网络的主干网络中,使用darknet53作为特征提取网络,其中添加了残差网络,提升深层网络的表达力;引进先验框,通过聚类(1-iou)的方式得到先验框,作为回归的参考;所述改进型yolo v3网络是根据样本集,以及所述样本对应的属性信息训练得到的。
[0038]
其中,改进后的yolo v3模型的卷积神经网络可对输入的训练集的海上目标图像进行不同大小的卷积运算,形成海上目标图像的不同尺度的特征度;
[0039]
卷积神经网络学习海上目标图像不同尺度的特征,实现对海上目标多个尺度的检测;
[0040]
其中,将收集到的海上目标图像,输入到改进型的yolo v3识别模型中,yolov3会预测三个不同大小的3d张量3dtensor,对应三个不同的规模scale;
[0041]
将待检测的海上目标图像,分成s*s的网格,每个所述网格预测c个矩形框以及所述矩形框的置信度;其中,s表示划分网格数;b表示每个网格负责的边框个数;
[0042]
选择置信度分数值最大的海上目标先验边界框,通过逻辑回归函数对待检测海上目标图像的位置进行预测;
[0043]
pr(object)
×
iou(b,object)=σ(t0),
[0044]
bx=σ(tx)+cx,
[0045]
by=σ(ty)+cy,
[0046]
bw=pw
×
etw,
[0047]
bh=ph
×
eth,
[0048]
模型的预测输出是(tx、ty、tw、th),cx和cy,表示的是海上目标网格的单元坐标,pw和ph表示预测前边界框的宽、高;bx、by、bw和bh是预测得到的边界框的中心的坐标和宽、高;yolo v3模型使用逻辑回归的方法预测每个边界框的分数;如果真实框和预测得到的其中一个边界框的重叠度比其他边界框都好,则该值便可能为1;如果不是最好的,但超过了
预设阈值,则忽略这次预测;yolo v3模型会为每一个真实的对象分配一个边界框,如果真实的对象与边界框不匹配,就不会产生类别预测损失或坐标,只会产生物体预测损失。
[0049]
改进的yolo v3识别模型中,损失函数作为度量预测值与真实值之间误差的评判标准,其在网络学习速度的快慢以及最终模型检测效果的好坏起着关键的作用。构造图2所示的损失函数,减少yolo v3模型识别海上目标框时的目标差,减少样本框中心坐标、宽高、平方的损失,增加样本识别的准确率;
[0050]
如图2所示,对于海上目标的坐标,所述损失函数采用误差平方和损失函数;置信度以及类别采用二元交叉熵损失函数,其中λ
ccord
为坐标预测的惩罚系数,设置取值为5;λ
noobj
为不包含运动目标时候置信度的惩罚系数,设置取值为0.5;k*k表示的是将一张输入图片划分的网格数量;m表示的是每一个网格所预测的目标边框数量,本发明在3种不同的规模上预测,且每种规模预测3个候选目标选框;其中xi、yi、wi、hi分别表示预测运动目标的中心点横纵坐标以及宽高,分别表示真实运动目标的中心点横纵坐标以及宽高;与分别表示第j个候选目标边框所在的第i个网格是否负责检测该物体;ci与分别表示第i个网格中存在运动目标预测的与真实的置信度;pi((c)与分别表示第i个网格中目标属于某一类别预测的与真实概率值。
[0051]
改进的yolo v3识别模型中,采用了darknet53作为特征提取网络,其中添加了shortcut connection,残差网络在深层次网络中使用较多,一方面可以缓解深层次网络带来的梯度消失影响,另一方面可以让网络的层数增加不会影响到模型精度的变差。因此,可以提升深层网络的表达力。
[0052]
改进的yolo v3识别模型中进行多尺度检测,可以看到网络结构输出了3个预测结果,为了适应不同的目标,提升对小目标的检测率,引进先验框,通过聚类(1-iou)的方式得到先验框,作为回归的参考。
[0053]
改进的yolo v3识别模型中,使用全卷积网络,可以看到网络中没有全连接网络,一方面减少了参数的个数,可以提升推导的效率,另一方面可以输入不同尺寸的图片,因为卷积网络的参数仅仅是卷积核,与输入无关,因此可以使用不同分辨率的图片进行训练,不用改变网络,从而使得网络适应不同分辨率的图片。
[0054]
改进的yolo v3识别模型训练时,batch_size选择为8张,学习率采用的初始学习率为1e-4,采用了指数衰减,同时优化器选择了adam优化器,该优化器能够在一定程度上减少损失的震荡。图3记录了训练过程的scale记录。
[0055]
目标检测模块,用于将海上目标图像的预测集,输入模型训练模块得到的海上目标识别模型中,进行目标检测,获得海上目标图像的属性信息,作为最终的目标检测结果;所述属性信息至少包括类别。
[0056]
预测输入如图4所示,预测结果如图5所示。
[0057]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1