一种用于高精度工件的空间平面数据拟合方法
1.本发明涉及高精度工件技术,具体是一种用于高精度工件的空间平面数据拟合方法。
背景技术:
2.随着三维激光扫描技术的快速发展,三维激光扫描技术已经广泛应用于工业界中。在工业界及学术界中具有平面特征的高精度工件的平面数据拟合十分常见,大到工件平面缺陷检测、拟合测量,小到实验室仿真拟合数据,以及在逆向工程中零件的加工和提取。具有平面特征的高精度工件的平面数据拟合问题是一个十分普通但又十分重要的问题。目前针对具有平面特征的高精度工件的平面数据拟合方法包括:最小二乘法、整体最小二乘法(guan y l,liu s t,zhou s j,et al. obust plane fitting of point clouds based on tls[j].journal of geodesy andgeodynamics,2011,31(5):80-83.)、随机采样一致性估计算法(fischler m a,bollesr c.random sample consensus:a paradigm for model fitting with applications toimage analysis and automated cartography[j].communications of the acm,1981, 24(6):381-395.)、m-估计样本一致性方法(torr p h s,zisserman a.mlesac:anew robust estimator with application to estimating image geometry[j].computervision and image understanding,2000,78(1):138-156.)。
[0003]
平面拟合较为常用的方法有最小二乘法和整体最小二乘法。这两种方法中,最小二乘法只考虑到z方向上的误差,却忽略了x,y方向上误差的影响,所以并不能得到较好的拟合结果。基于整体最小二乘的平面拟合方法,克服了最小二乘法只考虑到z方向的误差而忽略了x与y方向上误差的缺陷。虽然这两种方法模型简单,理想情况下很完美,但只是针对没有噪点情况下。由于此算法对噪点敏感,抗干扰能力较差,当要求在精度很高的情况下,会导致拟合误差过大,达不到理想效果。
[0004]
在有噪点的环境下,目前工业中使用随机采样一致性估计算法(ransac)和 m-估计样本一致性方法(msac)最为广泛,这两种算法都是基于内、外点的思想进行剔除噪点。理论上,这两种算法都可以剔除噪点的影响,并得到全局最优的参数估计。但是这两种方法有两个问题,第一个问题是需要预先设定阈值来区分每次迭代过程中的内点和外点,当模型具有明显的物理意义时,这个阈值还比较容易设定,但是若模型比较抽象时,这个阈值就不那么容易设定了,而且固定阈值不适用于样本动态变化的应用。第二个问题是,这两种方法的迭代次数是运行期决定的,不能预知迭代的确切次数。
技术实现要素:
[0005]
本发明的目的是针对现有技术的不足,而提供一种用于高精度工件的空间平面数据拟合方法。这种方法操作简单、平面数据拟合精度高、重复性好、迭代次数易确定、速度快,易于推广应用。
[0006]
实现本发明目的技术方案是:
[0007]
一种用于高精度工件的空间平面数据拟合方法,包括如下步骤:
[0008]
(1)获取待拟合平面数据,获取真实高精度工件的平面亚像素坐标,过程如下:
[0009]
1-1)对于同一件零件,采用远心镜头以垂直于高精度工件所在的平面方向对高精度工件进行多次图像采集;
[0010]
1-2)采用halcon软件依次对步骤1-1)采集的图像进行平面边缘提取,得到高精度工件平面的亚像素坐标值;
[0011]
(2)从待拟合平面数据中随机抽取10%的数据;
[0012]
(3)采用整体最小二乘法拟合数据,得到第一次拟合平面:对步骤(2)中的数据使用整体最小二乘法拟合,过程如下:
[0013]
3-1)利用平面法向量及过平面一点,确定平面方程的思想,求得平面方程,其中,设第一次拟合平面的法向量为:过平面一点n1为: (x
′1,y
′1,z
′1),平面方程写为:
[0014]
a1(x-x
′1)+b1(y-y
′1)+c1(z-z
′1)=0
ꢀꢀꢀ
(1.1),
[0015]
3-2)已知待拟合平面n个坐标点(xi,yi,zi),其中i=1,2,
…
n;
[0016]
3-3)计算均值点为:
[0017][0018][0019][0020]
3-4)构造n
×
3矩阵m:
[0021][0022]
3-5)计算3
×
3矩阵m
t
m的最小特征值及其对应的特征向量
[0023]
3-6)结果:第一次拟合平面法向量为:过平面一点n1为:为:
[0024]
3-7)对步骤的3-6)的平面法向量以及过平面一点n1,求得平面方程,得到第一次拟合平面方程为:
[0025][0026]
(4)采用对坐标点到第一次拟合平面的距离进行排序的思想整体剔除噪点并进行拟合,得到第二次拟合平面,过程如下:
[0027]
4-1)计算所有坐标点(xi,yi,zi)到第一次拟合平面的距离di,其中 i=1,2,
…
n,计算di为:
[0028][0029]
4-2)对di以升序的方式进行排序得到:d1≤d2≤
…
≤dh…
≤d
n-1
≤dn;
[0030]
4-3)选取步骤4-2)中点到平面距离最小的前个坐标点;
[0031]
4-4)对步骤4-3)中得到的个坐标点,使用步骤(3)中的整体最小二乘方法再次拟合平面,得到第二次拟合平面法向量为:过平面一点n2为:
[0032]
4-5)对步骤的4-4)的平面法向量以及过平面一点n2,求得第二次拟合平面方程为:
[0033][0034]
(5)再次剔除噪点并进行拟合,得到第三次拟合平面;
[0035]
5-1)对步骤4-4)中的个坐标点以及步骤4-5)中第二次拟合平面方程(1.7),重复步骤4-1)—步骤4-3),得到个坐标点;
[0036]
5-2)对步骤5-1)的个坐标点,使用步骤(3)中的整体最小二乘方法再次拟合平面,得到第三次拟合平面法向量为:过平面一点n3为:
[0037]
5-3)对步骤的5-2)的平面法向量以及过平面一点n3,求得第三次拟合平面方程为:
[0038][0039]
(6)计算残差和:
[0040]
6-1)使用步骤4-1)的方法,计算步骤5-1)中的个坐标点到第三次拟合平面方程(1.8)的距离di,其中
[0041]
6-2)计算残差和srdi:
[0042][0043]
(7)对步骤(2)-步骤(6)迭代3次,根残差和srdi,选择其对应的拟合平面方程(1.8);
[0044]
7-1)若srdi≤1-10
,则停止迭代,其对应的第三次拟合平面方程(1.8)为最终的结果;否则,比较每次迭代得到的srdi,选择最小的srdi对应的拟第三次合平面方程(1.8)为最终结果。
[0045]
本技术方案采用随机抽取10%的拟合数据进行拟合,确定了迭代的确切次数,使得拟合速度更快。从而避免了随机采样一致性估计算法(random sampleconsensus,简称ransac)和m-估计样本一致性方法(m-estimator sampleconsensus,简称msac)的迭代次数是运行期决定的,不能预知迭代的确切次数的问题。
[0046]
本技术方案采用坐标点到拟合平面的距离进行排序的思想整体剔除噪点,保证了高精度拟合的重复性,误差满足工业要求。从而避免了随机采样一致性估计算法和m-估计样本一致性方法的阈值不容易设定的问题。
[0047]
这种方法操作简单、平面数据拟合精度高、重复性好、速度快,易于推广应用。
附图说明
[0048]
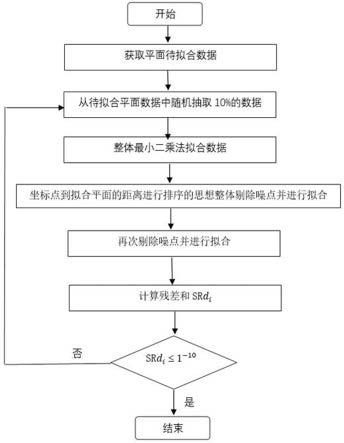
图1为实施例的方法流程示意图;
[0049]
图2为实施例中具有平面特征工件采样的平面拟合结果侧面示意图;
[0050]
图3为实施例中具有平面特征工件采样的平面拟合结果正面示意图;
[0051]
图4为实施例中具有平面特征工件采样平面,进行30次实验对比两算法平面法向量偏离均值结果示意图;
[0052]
图5为实施例中具有平面特征工件采样平面,进行30次实验对比两算法过平面一点的坐标偏离均值结果示意图;
[0053]
图6为实施例中具有平面特征工件采样平面获得相同大小的数据集,进行30次实验对比两算法运行时间结果示意图。
具体实施方式
[0054]
下面结合附图和实施例对本发明的内容作进一步的阐述,但不是对本发明的限定。
[0055]
实施例:
[0056]
一种用于高精度工件的空间平面数据拟合方法,包括如下步骤:
[0057]
(1)获取待拟合平面数据,获取真实高精度工件的平面亚像素坐标,过程包括:
[0058]
1-1)对于同一件零件,采用远心镜头以垂直于高精度工件所在的平面方向对高精度工件进行多次图像采集;
[0059]
1-2)采用halcon软件依次对步骤1-1)采集的图像进行平面边缘提取,得到高精度工件平面的亚像素坐标值;
[0060]
(2)从待拟合平面数据中随机抽取10%的数据;
[0061]
(3)采用整体最小二乘法拟合数据,得到第一次拟合平面:对步骤(2)中的数据使用整体最小二乘法拟合,过程如下:
[0062]
3-1)利用平面法向量及过平面一点,确定平面方程的思想,求得平面方程,其中,设第一次拟合平面的法向量为:过平面一点n1为: (x
′1,y
′1,z
′1),平面方程写为:
[0063]
a1(x-x
′1)+b1(y-y
′1)+c1(z-z
′1)=0
ꢀꢀꢀ
(1.1),
[0064]
3-2)已知待拟合平面n个坐标点(xi,yi,zi),其中i=1,2,
…
n;
[0065]
3-3)计算均值点为:
[0066][0067][0068][0069]
3-4)构造n
×
3矩阵m:
[0070]
[0071]
3-5)计算3
×
3矩阵m
t
m的最小特征值及其对应的特征向量
[0072]
3-6)结果:第一次拟合平面法向量为:过平面一点n1为:为:
[0073]
3-7)对步骤的3-6)的平面法向量以及过平面一点n1,求得平面方程,得到第一次拟合平面方程为:
[0074][0075]
(4)采用对坐标点到第一次拟合平面的距离进行排序的思想整体剔除噪点并进行拟合,得到第二次拟合平面,过程如下:
[0076]
4-1)计算所有坐标点(xi,yi,zi)到第一次拟合平面的距离di,其中 i=1,2,
…
n,计算di为:
[0077][0078]
4-2)对di以升序的方式进行排序得到:d1≤d2≤
…
≤dh…
≤d
n-1
≤dn;
[0079]
4-3)选取步骤4-2)中点到平面距离最小的前个坐标点;
[0080]
4-4)对步骤4-3)中得到的个坐标点,使用步骤(3)中的整体最小二乘方法再次拟合平面,得到第二次拟合平面法向量为:过平面一点n2为:
[0081]
4-5)对步骤的4-4)的平面法向量以及过平面一点n2,求得第二次拟合平面方程为:
[0082][0083]
(5)再次剔除噪点并进行拟合,得到第三次拟合平面;
[0084]
5-1)对步骤4-4)中的个坐标点以及步骤4-5)中第二次拟合平面方程(1.7),重复步骤4-1)—步骤4-3),得到个坐标点;
[0085]
5-2)对步骤5-1)的个坐标点,使用步骤(3)中的整体最小二乘方法再次拟合平面,得到第三次拟合平面法向量为:过平面一点n3为:
[0086]
5-3)对步骤的5-2)的平面法向量以及过平面一点n3,求得平面方程,得到第三次拟合平面方程为:
[0087][0088]
(6)计算残差和:
[0089]
6-1)使用步骤4-1)的方法,计算步骤5-1)中的个坐标点到第三次拟合平面方程(1.8)的距离di,其中
[0090]
6-2)计算残差和srdi:
[0091][0092]
(7)对步骤(2)-步骤(6)迭代3次,根残差和srdi,选择其对应的拟合平面方程
(1.8);
[0093]
7-1)若srdi≤1-1
,则停止迭代,其对应的第三次拟合平面方程(1.8)为最终的结果;否则,比较每次迭代得到的srdi,选择最小的srdi对应的拟第三次合平面方程(1.8)为最终结果。
[0094]
采用具有平面特征的工件进行仿真实验,流程如图1所示。其中平面拟合结果如图2、图3所示。30次实验与matlab封装的算法对比结果如图4、图5、图6所示。
[0095]
结果表明,在同种采样数据以及多次实验情况下,依照本例方法与matlab 封装的算法拟合后对比,依照本例方法的平面法向量以及过平面一点的坐标值波动小、更稳定,同时运行时间更快。说明依照本例方法获取具有平面特征真实工件的平面坐标数据,能更快实现高精度具有平面特征真实工件的平面拟合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1