一种无人驾驶炒饭车、无人现场制作和无人售卖的炒饭共享系统的制作方法
1.本实用新型属于共享技术领域,尤其涉及一种无人驾驶炒饭车、无人现场制作和无人售卖的炒饭共享系统。
背景技术:
2.随着科技发展,人们购物方式的改变,无人值守的自动售卖模式正在进入人们生活。应运而生的是各类自动售卖机的出现,但是目前市场上的自动售货机存在一些问题:销售商品种类单一,体积大造价高,补货不灵活,无法现场制作只能售卖成品,如果客户想要吃到现做的美食,则需要到店铺排队购买。因此现有技术中,缺乏一种能够现场制作美食,自动售卖的设备。
技术实现要素:
3.本实用新型的目的在于,针对现有技术的不足,提出一种无人驾驶炒饭车、无人现场制作和无人售卖的炒饭共享系统,可以让订餐的用户在最短时间内吃到热的、新鲜、美味、可口、符合个人口味、健康生态、品质有保障的炒饭,既可以节省用户外出点餐取餐的时间,也能确保食材源头可追溯,封闭式运输和封闭式制作,确保卫生,以确保用户可以吃到健康无菌的健康炒饭。
4.一种无人驾驶炒饭车包括自动行驶无人现场制作炒饭无人售卖营业车及其搭载于所述自动行驶无人现场制作炒饭无人售卖营业车上的共享炒饭制作设备主机和通讯模块。
5.进一步的,所述自动行驶无人现场制作炒饭无人售卖营业车外观四周设置有灯带,所述自动行驶无人现场制作炒饭无人售卖营业车的底层包括底盘结构、车身结构和电池模块,底盘结构上设置有四个减震平衡装置,减震平衡装置上安装有驱动装置,所述驱动装置连接电池模块作为驱动动力供应储存单元使用;电池模块连接有一自动充电模块;所述通讯模块有一组以上,自动行驶无人现场制作炒饭无人售卖营业车四方均有安装uwb定位套件和采用现有的gps和北斗定位导航模块,自动行驶无人现场制作汤饮无人售卖营业车下方设有充电接口单元,充电接口单元上分布有稳压模块作为稳压使用,进一步的所述充电接口单元安装与所述底盘结构一侧与车身连接处;自动行驶无人现场制作炒饭无人售卖营业车在前行车头车身上和车身后面布置有多个避障单元毫米波雷达、单线或多线雷达、超声波探测器,避障单元毫米波雷达安装车身前部和后部对应角度及长度按照可以覆盖车正前面120
°
,车后面120
°
;所述驱动通过一组核心控制电路,根据行驶线路、场景变化及避障数据,由主控驱动模块和嵌入式算法的结合,向驱动装置发送指令,实现两个或以上驱动轮以左右速度差的原理进行转向或调头的作用,核心控制电路包括有处理器单元、无线通信单元、电路数据采集接口单元、主控模块;核心控制单元通过嵌入式技术,写入对应的驱动程序后,并同时接收和输出电路数据及指令,并通过无线通信模块与后台服务器进
行网络数据无线连接,进而完全可以在后台服务器授权区域内实现自动避障、自动规划路径、在低速下可自动行走、自动归位,并通过充电单元中的定位数据查找充电器模块位置后实现自动充电;自动行驶无人现场制作炒饭无人售卖营业车上还设置有摄像头和移动设备充电窗口,包含lightning充电接头、micro usb充电接头和typ
‑
c充电接头。
6.进一步的,所述自动行驶无人现场制作炒饭无人售卖营业车车身底盘框架结构,通过焊接机螺纹方式进行组装固定后,将车身和底盘结构连成一个整体,底部结构四周外方为承重梁,外部四周梁框架结构,框内结构中心上还有中心梁,四周框架梁下方有固定轮子结构,轮子为支撑重量受力点,底部受力点梁上方为箱体四角立杆,立杆中部位置和上顶口有四个拉杆固定架,均采用焊接或螺丝加卡扣固定而成。
7.进一步的,所述自动行驶无人现场制作炒饭无人售卖营业车车厢底部上方有废水仓和清水仓,废水仓和电池模块可以独立从侧面直接挪出,供方便更换电池和清洗废水仓所用,清水仓固定在车箱四角的立柱上,清水仓通过清水进水口加水,清水仓和废水仓及电池模块中心余留了中心立柱位置,中心立柱位置在中心梁上,供制作炒饭设备支撑所用的中空多窗结构,上顶部有一个或多个上门或窗,上门或窗可在接到指令时自动开启和关闭,在开启时可实现米饭仓和辅料仓加食材作用,中空窗还包括前门或窗、后门或窗、左门或窗和右门或窗,根据需求进行开窗或开门,窗上或门上还设有四个取餐口,取餐口内侧有四个放炒饭平台,放炒饭平台有旋转装置,便于机械手放餐和顾客取餐,放炒饭平台边上还有一个放餐盒装置,供食品放置,餐盒置放在平台上方,开窗或开门均固定在箱体四周立杆上,可实现加水、取水、维修、清洁、取餐之用,中空天窗或门均采用电动功能实现接收指令,达到自动开启和关闭,在授权下方可使用。
8.进一步的,所述共享炒饭制作设备主机的原料层包括至少有一个以上米饭仓和蛋仓,米饭仓底部有米饭传送带米饭打散结构,蛋仓鸡蛋放置在蛋托盘上,蛋仓前有破蛋刀片和电机、可旋转开蛋蛋夹,真空发生器通过真空吸盘固定,处理后的蛋壳进入蛋壳存储桶,鸡蛋通过蛋液下流通道进入蛋黄蛋清分离机构,使用轨道滑台微型行架机械手通过米饭下料机构传出到烹饪层的炒饭锅中,计量采用中心立柱上端和米饭仓上口处设有放置平台,放置平台取空刚好可以让米饭仓装满;放置平台上至少有一个及以上的空洞,用来放米饭仓,本平台设计为两个空洞,可以放两个米饭仓,放置平台为圆空型,三个计量器放在米饭仓平台的外沿口上方和米饭仓外沿下方进行固定,置放位置为三均等位,主料放入料仓时称总重量,当需要加料时由主控模块向执行模块的米饭仓发送出料指令,当米饭仓的重量减少到本次设定需本次出料数量时,计量模块向主控模块发出信息,主控模块向执行模块的轨道滑台微型行架机械手发出停止指令,即可停止出料。辅料和调料层包括辅料桶及下料机构、蛋黄打散存储机构、蛋清打散机构、调味料桶、食用油存储桶、食用油添加泵、调料计量泵和辅料定量下料机构,辅料和调料层底部有小型螺旋杆送料方式,以小型螺旋杆电动控制转动方式将辅料传出到计量装置处,小型螺旋杆尽头有一个计量小斗,计量斗有一个称重装置,当设定的重量够时,称重装置发送信息到主控模块,主控模块发送给螺旋控制模块,停止辅料输出,计量好后打开电动底闸门,辅料进入炒饭锅中。底层还包括小型抽油烟机,炒饭时通过油烟过滤器处理后再通过油烟管道排出。调味料桶下口有小型电子出口电子阀门电子计量器,阀门有震动装置,当需要加入调料时,打开阀门后震动,按照设定好的数量将调料放入碗中。辅料仓和调料仓可以独立运动,可根据不同的炒饭品种,如蛋炒
饭、海鲜炒饭、肉炒饭等工艺不同,炒饭不同设定的配比不同自动加入辅料、调料,达到均衡、可口的目的。
9.进一步的,所述自动行驶无人现场制作炒饭无人售卖营业车还设有餐饮食品存放台,按碗计算,单碗炒饭食材数量够后,存放在台面板有烹饪旋转台,需要放食材到炒饭锅时,旋转到烹饪设备炒饭锅上方翻动,将炒食倒入锅中进行炒熟,所述的制作模块中还设有烹饪层,烹饪层中有炒饭锅,炒饭锅上方有炒饭搅拌机构,炒饭锅下方有加热装置,加热装置有加热能供给加热装置,加热能源一般为自备电能和直供电能,加热装置和炒锅和旋转台装置均为一对一的一体装置,旋转台的旋转处为中心立柱,旋转处为电动齿轮装置,只要有设备工作需要旋转时,接收指令后可任意旋转。炒锅边上有供水装置,当炒锅需要清洗时,炒锅装有水位探测报警器发送指令,供水装置通过清水仓排水口将向清水仓向炒饭锅里自动加水,以供炒饭锅清洗。所述的炒饭锅当接收到主控模块指令后将起动作业,根据炒锅的功率大小和炒饭的数量计算出能炒熟炒饭的时间,按设定时间将炒饭炒熟达到可口。所述的吸取剩留物设备采用高压吸力泵的方式吸取锅中的剩留物,高压吸力泵安装在箱体中部以锅灶为中心,采用立杆安装在灶台平面上方,利用管子与上吸头连接管子下端和高压泵前口连接,经泵力吸走剩留物到废水仓,当废水水位探测报警器报警时,废水通过废水出口排出。高压泵有自动转动装置,在需要吸取剩留物时根据系统设定盛好炒饭后才能自动转移到对应炒锅进行使用,移动方法可采取吸管固定转动,也可采取炉灶台面转动的方式,吸取完后将自动停止作业。所述的炉灶固定在烹饪旋转台上,烹饪平台端处与中心立柱连接,中心立柱与烹饪平台采取齿轮方法进行电动转动。所述的售卖方法一般一次炒一碗的方法进行售卖,当每次炒熟后将炒饭盛到餐盘中,炒锅中还剩有的汤水或残物,由吸取剩留残物的设备将其吸走,吸走炒锅中所有剩余物,后进行清洗,以此轮番作业。所述的自动行驶无人现场制作炒饭无人售卖营业车炒饭在煮食时,均在静止下作业,在自动行驶无人现场制作炒饭无人售卖营业车运动时停止餐食翻炒作业。所述的自动行驶无人现场制作炒饭无人售卖营业车外部和顶部将由防烫材料来制作,确保车身和制作设备不传热、能隔热。
10.进一步的,所述摄像头设有一个或多个,在无人行驶中摄像头观察周围环境,摄入周围的障碍物及环境状况和图像摄影及储存或在营业车或设备受到人为破坏或设备自行损坏时提供依据和方位确定。
11.进一步的,所述自动行驶无人现场制作炒饭无人售卖营业车还设定小型的制冷设备,小型的制冷设备在自动行驶无人现场制作炒饭无人售卖营业车营业时或车内存有主料或辅料和调料时将冷气供给米饭仓、蛋仓、调味料桶确保食品保质保量。
12.进一步的,所述的清水仓和废水仓底部分别设置有清水仓底部电子阀门和废水废物仓底部电子阀门,清水仓设有清水仓上部端盖。
13.进一步的,所述通讯模块采用4g、5g无线通讯和gprs定位系统,通讯模块还设计了蓝牙、wifi、zigeb通讯模块;通讯模块还设有语音识别模块,当客户点餐,取餐叫号及招唤到达现场时均可采用语音交互的方式进行对话及广播。
14.进一步的,所述的清水仓设有能连续作业的一定数量的清水,清水仓还设有水量监测传感器,当水量不足时向后台服务器及管理人发送缺水的警报,告知水量不足需要补水并由管理人及时送达,当不能及时送达补充清水时,自动行驶无人现场制作炒饭无人售卖营业车将自动停止作业;清水仓和废水仓还设有水量超出警报装置,当清水或污水多余
或将要超量时将会发生自动警报,当污水超出警戒或无人清理时将自动停止作业。
15.进一步的,所述自动行驶无人现场制作炒饭无人售卖营业车设有固定直供电源接口、用电安全设备和充电电池,当电能电池容量不足时可自动回归到开放式充电装置中实行自动充电,当电能充足时自动回到作业区域或固定设定的存放处等候指令。
16.进一步的,所述取餐口处还设有显示屏由无人售卖营业车读取凭证对应后自动开启取炒饭窗口,机械手抓取对应的炒饭放到包装盒中,由购买炒饭顾客自行挪走自己购买的炒饭后离开,取炒饭窗口自动关闭。
17.一种无人现场制作和无人售卖的炒饭共享系统,包括无人驾驶炒饭车、用户终端和总系统平台。
18.进一步的,所述总系统平台由服务器系统、数据库系统和云计算系统组成;服务器中通过布局与算法建设后台总系统模块。
19.进一步的,所述后台总系统模块包括数据控制与采集、炒饭上架管理模块、炒饭下架管理模块、数量管理模块、数据记录与查询模块、财务管理模块、对账模块、进销存模块、价格模块、经营计算模块、用户信息管理模块、设备定位管理模块、设备信息管理模块、数据接收模块、数据发送模块、app运营模块、数据统计模块和设备故障维护模块以及区域管理模块和服务运行模块;后台总系统模块采用通讯连接方法与所有在运行的无人驾驶炒饭车连接。
附图说明
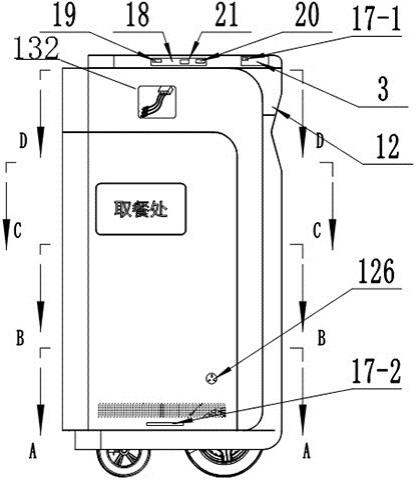
20.图1为本实用新型的主视图;
21.图2为本实用新型的左视图;
22.图3为本实用新型的俯视图;
23.图4为本实用新型的底仓截面图;
24.图5为本实用新型的内部结构示意图;
25.图6为本实用新型的内部结构轴侧图;
26.图7为本实用新型的原料层截面图;
27.图8为本实用新型的输料层截面图;
28.图9为本实用新型的烹饪层截面图;
29.图10是本实用新型点餐流程图。
30.图11是本实用新型炒饭车行驶流程图。
31.图12是本实用新型炒饭车运行流程图。
32.其中,1
‑
自动行驶无人现场制作炒饭无人售卖营业车、2
‑
共享炒饭制作设备主机、3
‑
通讯模块、6
‑
底盘结构、7
‑
车身结构、8
‑
减震平衡装置、9
‑
驱动装置、10
‑
电池模块、11
‑
充电模块、12
‑
uwb定位套件、13
‑
充电接口模块、13
‑
1:稳压模块、14
‑
避障单元毫米波雷达、15
‑
单线或多线雷达、16
‑
超声波探测器、17
‑
1:定位导航、17
‑
2:核心控制电路、18
‑
核心控制电路包括有处理器单元、19
‑
无线通信单元、20
‑
电路数据采集接口单元、21
‑
主控模块、30
‑
原料层,31
‑
米饭仓,32
‑
蛋仓,33
‑
米饭打散机构,34
‑
米饭下料机构,35
‑
米饭传送带,36
‑
轨道滑台微型行架机械手,37
‑
真空发生器,38
‑
真空吸盘,39
‑
破蛋刀片和电机,40
‑
可旋转开蛋蛋夹,41
‑
蛋壳储存桶,42
‑
蛋黄蛋清分离机构,43
‑
蛋液下流通道,44
‑
蛋托盘,50
‑
辅料和调
料层,51
‑
辅料桶及下料机构,52
‑
蛋黄打散储存机构,53
‑
蛋清打散储存机构,54
‑
调味料桶,55
‑
放置平台,56
‑
调料计量泵
‑
56,辅料定量下料机构
‑
57,烹饪层
‑
60,烹饪旋转台
‑
61,餐盘
‑
62,炒饭搅拌机构
‑
63,炒饭锅
‑
65,加热装置
‑
66,旋转成品炒饭放置台
‑
67,底层
‑
70,清水仓
‑
71,水位探测报警器
‑
72,小型制冷设备
‑
73,废水仓
‑
74,清水进水口
‑
75,水位探测报警器
‑
72,小型制冷设备
‑
73,废水仓
‑
74,清水进水口
‑
75,水位探测报警器
‑
76,废水出口
‑
77,清水仓排水口
‑
78,1上门或窗
‑
101,上门或窗
‑
101
‑
5,上门或窗
‑
101
‑
6,门或窗
‑
101
‑
7,上门或窗
‑
101
‑
8,灯带
‑
125,固定电源接口
‑
126,小型抽油烟机
‑
127,油烟过滤器
‑
128,食用油储存桶
‑
129,食用油添加泵
‑
130,油烟管道
‑
131,移动设备充电窗口
‑
132。
具体实施方式
33.为了对本实用新型的技术特征、目的和效果有更加清楚的理解,现对照附图说明本实用新型的具体实施方式。
34.一种无人驾驶炒饭车,其特征在于,包括自动行驶无人现场制作炒饭无人售卖营业车1及其搭载于所述自动行驶无人现场制作炒饭无人售卖营业车1上的共享炒饭制作设备主机2和通讯模块3。
35.所述自动行驶无人现场制作炒饭无人售卖营业车1外观四周设置有灯带125,所述自动行驶无人现场制作炒饭无人售卖营业车1的底层70包括底盘结构6、车身结构7和电池模块10,底盘结构6上设置有四个减震平衡装置8,减震平衡装置8上安装有驱动装置9,所述驱动装置9连接电池模块10作为驱动动力供应储存单元使用;电池模块10连接有一自动充电模块11;所述通讯模块3有一组以上,自动行驶无人现场制作炒饭无人售卖营业车1四方均有安装uwb定位套件12和采用现有的gps和北斗定位导航模块17
‑
1,自动行驶无人现场制作汤饮无人售卖营业车1下方设有充电接口单元13,充电接口单元13上分布有稳压模块13
‑
1作为稳压使用,进一步的所述充电接口单元安装与所述底盘结构一侧与车身连接处;自动行驶无人现场制作炒饭无人售卖营业车1在前行车头车身上和车身后面布置有多个避障单元毫米波雷达14、单线或多线雷达15、超声波探测器16,避障单元毫米波雷达14安装车身前部和后部对应角度及长度按照可以覆盖车正前面120
°
,车后面120
°
;所述驱动通过一组核心控制电路17
‑
2,根据行驶线路、场景变化及避障数据,由主控驱动模块和嵌入式算法的结合,向驱动装置发送指令,实现两个或以上驱动轮以左右速度差的原理进行转向或调头的作用,核心控制电路包括有处理器单元18、无线通信单元19、电路数据采集接口单元20、主控模块21;核心控制单元通过嵌入式技术,写入对应的驱动程序后,并同时接收和输出电路数据及指令,并通过无线通信模块与后台服务器进行网络数据无线连接,进而完全可以在后台服务器授权区域内实现自动避障、自动规划路径、在低速下可自动行走、自动归位,并通过充电单元中的定位数据查找充电器模块11位置后实现自动充电;自动行驶无人现场制作炒饭无人售卖营业车1上还设置有摄像头104,和移动设备充电窗口132,包含lightning充电接头、micro usb充电接头和typ
‑
c充电接头。
36.所述自动行驶无人现场制作炒饭无人售卖营业车1车身底盘框架结构,通过焊接机螺纹方式进行组装固定后,将车身和底盘结构连成一个整体,底部结构四周外方为承重梁,外部四周梁框架结构,框内结构中心上还有中心梁,四周框架梁下方有固定轮子结构,轮子为支撑重量受力点,底部受力点梁上方为箱体四角立杆,立杆中部位置和上顶口有四
个拉杆固定架,均采用焊接或螺丝加卡扣固定而成。
37.所述自动行驶无人现场制作炒饭无人售卖营业车1车厢底部上方有废水仓74和清水仓71,废水仓74和电池模块10可以独立从侧面直接挪出,供方便更换电池和清洗废水仓74所用,清水仓71固定在车箱四角的立柱上,清水仓71通过清水进水口75加水,清水仓71和废水仓74及电池模块10中心余留了中心立柱121位置,中心立柱位置在中心梁上,供制作炒饭设备支撑所用的中空多窗结构,上顶部有一个或多个上门或窗101,上门或窗101可在接到指令时自动开启和关闭,在开启时可实现米饭仓31和辅料仓加食材作用,中空窗还包括前门或窗101
‑
5、后门或窗101
‑
6、左门或窗101
‑
7和右门或窗101
‑
8,根据需求进行开窗或开门,窗上或门上还设有四个取餐口124,取餐口124内侧有四个放炒饭平台,放炒饭平台有旋转装置,便于机械手放餐和顾客取餐,放炒饭平台边上还有一个放餐盒装置,供食品放置,餐盒置放在平台上方,开窗或开门均固定在箱体四周立杆上,可实现加水、取水、维修、清洁、取餐之用,中空天窗或门均采用电动功能实现接收指令,达到自动开启和关闭,在授权下方可使用。
38.所述共享炒饭制作设备主机2的原料层30包括至少有一个以上米饭仓31和蛋仓32,米饭仓31底部有米饭传送带35米饭打散结构33,蛋仓32鸡蛋放置在蛋托盘44上,蛋仓32前有破蛋刀片和电机39、可旋转开蛋蛋夹40,真空发生器37通过真空吸盘38固定,处理后的蛋壳进入蛋壳存储桶41,鸡蛋通过蛋液下流通道43进入蛋黄蛋清分离机构42,使用轨道滑台微型行架机械手36通过米饭下料机构34传出到烹饪层60的炒饭锅65中,计量采用中心立柱121上端和米饭仓31上口处设有放置平台55,放置平台55取空刚好可以让米饭仓31装满;放置平台55上至少有一个及以上的空洞,用来放米饭仓31,本平台设计为两个空洞,可以放两个米饭仓31,放置平台55为圆空型,三个计量器放在米饭仓31平台的外沿口上方和米饭仓31外沿下方进行固定,置放位置为三均等位,主料放入料仓时称总重量,当需要加料时由主控模块21向执行模块的米饭仓31发送出料指令,当米饭仓31的重量减少到本次设定需本次出料数量时,计量模块向主控模块发出信息,主控模块21向执行模块21的轨道滑台微型行架机械手36发出停止指令,即可停止出料。辅料和调料层50包括辅料桶及下料机构51、蛋黄打散存储机构52、蛋清打散机构53、调味料桶54、食用油存储桶129、食用油添加泵130、调料计量泵56和辅料定量下料机构57,辅料和调料层50底部有小型螺旋杆送料方式,以小型螺旋杆电动控制转动方式将辅料传出到计量装置处,小型螺旋杆尽头有一个计量小斗,计量斗有一个称重装置,当设定的重量够时,称重装置发送信息到主控模块21,主控模块21发送给螺旋控制模块21,停止辅料输出,计量好后打开电动底闸门,辅料进入炒饭锅65中。底层70还包括小型抽油烟机127,炒饭时通过油烟过滤器128处理后再通过油烟管道131排出。调味料桶54下口有小型电子出口电子阀门电子计量器,阀门有震动装置,当需要加入调料时,打开阀门后震动,按照设定好的数量将调料放入碗中。辅料仓和调料仓可以独立运动,可根据不同的炒饭品种,如蛋炒饭、海鲜炒饭、肉炒饭等工艺不同,炒饭不同设定的配比不同自动加入辅料、调料,达到均衡、可口的目的。
39.所述自动行驶无人现场制作炒饭无人售卖营业车1还设有餐饮食品存放台,按碗计算,单碗炒饭食材数量够后,存放在台面板有烹饪旋转台61,需要放食材到炒饭锅65时,旋转到烹饪设备炒饭锅65上方翻动,将炒食倒入锅中进行炒熟,所述的制作模块中还设有烹饪层60,烹饪层60中有炒饭锅65,炒饭锅65上方有炒饭搅拌机构63,炒饭锅65下方有加热
装置66,加热装置有加热能供给加热装置,加热能源一般为自备电能和直供电能,加热装置和炒锅和旋转台装置均为一对一的一体装置,旋转台的旋转处为中心立柱121,旋转处为电动齿轮装置,只要有设备工作需要旋转时,接收指令后可任意旋转。炒锅边上有供水装置,当炒锅需要清洗时,炒锅装有水位探测报警器72发送指令,供水装置通过清水仓排水口78将向清水仓71向炒饭锅65里自动加水,以供炒饭锅65清洗。所述的炒饭锅65当接收到主控模块指令后将起动作业,根据炒锅的功率大小和炒饭的数量计算出能炒熟炒饭的时间,按设定时间将炒饭炒熟达到可口。所述的吸取剩留物设备采用高压吸力泵的方式吸取锅中的剩留物,高压吸力泵安装在箱体中部以锅灶为中心,采用立杆安装在灶台平面上方,利用管子与上吸头连接管子下端和高压泵前口连接,经泵力吸走剩留物到废水仓74,当废水水位探测报警器76报警时,废水通过废水出口77排出。高压泵有自动转动装置,在需要吸取剩留物时根据系统设定盛好炒饭后才能自动转移到对应炒锅进行使用,移动方法可采取吸管固定转动,也可采取炉灶台面转动的方式,吸取完后将自动停止作业。所述的炉灶固定在烹饪旋转台61上,烹饪平台端处与中心立柱121连接,中心立柱与烹饪平台采取齿轮方法进行电动转动。所述的售卖方法一般一次炒一碗的方法进行售卖,当每次炒熟后将炒饭盛到餐盘62中,放置到旋转成品炒饭放置台67,炒锅中还剩有的汤水或残物,由吸取剩留残物的设备将其吸走,吸走炒锅中所有剩余物,后进行清洗,以此轮番作业。所述的自动行驶无人现场制作炒饭无人售卖营业车炒饭在煮食时,均在静止下作业,在自动行驶无人现场制作炒饭无人售卖营业车运动时停止餐食翻炒作业。所述的自动行驶无人现场制作炒饭无人售卖营业车外部和顶部将由防烫材料来制作,确保车身和制作设备不传热、能隔热。
40.所述摄像头104设有一个或多个,在无人行驶中摄像头104观察周围环境,摄入周围的障碍物及环境状况和图像摄影及储存或在营业车或设备受到人为破坏或设备自行损坏时提供依据和方位确定。
41.所述自动行驶无人现场制作炒饭无人售卖营业车1还设定小型的制冷设备73,小型的制冷设备73在自动行驶无人现场制作炒饭无人售卖营业车1营业时或车内存有主料或辅料和调料时将冷气供给米饭仓31、蛋仓32、调味料桶54确保食品保质保量。
42.所述的清水仓71和废水仓74底部分别设置有清水仓底部电子阀门和废水废物仓底部电子阀门,清水仓74设有清水仓上部端盖。
43.所述通讯模块3采用4g、5g无线通讯和gprs定位系统,通讯模块3还设计了蓝牙、wifi、zigeb通讯模块;通讯模块3还设有语音识别模块,当客户点餐,取餐叫号及招唤到达现场时均可采用语音交互的方式进行对话及广播。
44.所述的清水仓71设有能连续作业的一定数量的清水,清水仓71还设有水量监测传感器,当水量不足时向后台服务器及管理人发送缺水的警报,告知水量不足需要补水并由管理人及时送达,当不能及时送达补充清水时,自动行驶无人现场制作炒饭无人售卖营业车将自动停止作业;清水仓71和废水仓74还设有水量超出警报装置,当清水或污水多余或将要超量时将会发生自动警报,当污水超出警戒或无人清理时将自动停止作业。
45.所述自动行驶无人现场制作炒饭无人售卖营业车1设有固定直供电源接口126、用电安全设备105和充电电池,当电能电池容量不足时可自动回归到开放式充电装置中实行自动充电,当电能充足时自动回到作业区域或固定设定的存放处等候指令。
46.所述取餐口124处还设有显示屏106由无人售卖营业车读取凭证对应后自动开启
取炒饭窗口124,机械手抓取对应的炒饭放到包装盒中,由购买炒饭顾客自行挪走自己购买的炒饭后离开,取炒饭窗口124自动关闭。
47.一种无人现场制作和无人售卖的炒饭共享系统,包括无人驾驶炒饭车、用户终端和总系统平台。
48.所述总系统平台由服务器系统、数据库系统和云计算系统组成;服务器中通过布局与算法建设后台总系统模块。
49.所述后台总系统模块包括数据控制与采集、炒饭上架管理模块、炒饭下架管理模块、数量管理模块、数据记录与查询模块、财务管理模块、对账模块、进销存模块、价格模块、经营计算模块、用户信息管理模块、设备定位管理模块、设备信息管理模块、数据接收模块、数据发送模块、app运营模块、数据统计模块和设备故障维护模块以及区域管理模块和服务运行模块;后台总系统模块采用通讯连接方法与所有在运行的无人驾驶炒饭车连接。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1