一种基于微控制器设备和微型机器学习的自适用交通调度的系统及方法与流程
1.本发明涉及交通调度技术领域,具体提供一种基于微控制器设备和微型机器学习的自适用交通调度的系统及方法。
背景技术:
2.交通作为我国发展的支柱,直接影响到人们的健康、商业和环境成本。但在今天的5g世界,交通拥堵已经成为我们日常生活中的一个严重问题。例如,拥挤的道路是空气污染的主要原因。高峰和非高峰时间之间几乎没有差异,即使规定速度为80千米/小时,交通流的平均速度为50-60千米/小时。长时间的交通拥挤也会导致一些没有封闭环境交通工具的人的健康问题。因此提高交通信号的效率迫在眉睫。
3.利用车道上的压电传感器的数据去计算交通的密度和车辆的分类,然后通过tinyml的算法,根据识别出的交通密度去预测绿灯的时间,从而进一步帮助改善交通灯的时间设置和交通拥挤的缓解,具有重要的意义。
技术实现要素:
4.本发明的技术任务是针对上述存在的问题,提供一种能够利用压条收集的数据进行车辆分类,以达到更高效的交通的基于微控制器设备和微型机器学习的自适用交通调度的系统。
5.本发明进一步的技术任务是提供一种基于微控制器设备和微型机器学习的自适用交通调度的方法。
6.为实现上述目的,本发明提供了如下技术方案:
7.一种基于微控制器设备和微型机器学习的自适用交通调度的系统,包括传感器放置模块、传感器数据收集模块、车辆检测模型、车辆分类模块和预测信号灯模块;
8.在传感器放置模块上放置两个压电条,采集车辆通过压电条铲车的电压峰值;
9.传感器数据收集模块用于收集数据,计算汽车的轴距识别车辆类型;
10.车辆检测模块用于车辆的检测和分类;
11.车辆分类模块用于根据车辆的轴距和速度,进行车辆的分类;
12.预测信号灯模块用于预测在红色信号期间累积的车辆的信号持续时间。
13.作为优选,传感器数据收集模块利用计算的车辆通过速度进行车辆类型的分组,其中利用两点时间比计算轴距,对车辆进行分类。
14.作为优选,分类的车辆用作同一微控制器汇总预训练随机森林回归模型的输入,再利用训练结果预测信号灯。
15.作为优选,车辆检测模块中,每条车道装有两对压电条。
16.作为优选,车辆分类模块中,每种车辆的轴距和速度均为固定的,用于车辆的分类。
17.作为优选,预测信号灯模块将每个类别的车辆计数作为输入,并预测车辆通过交叉路口所需的绿色信号的持续时间。
18.一种基于微控制器设备和微型机器学习的自适用交通调度的方法,基于本发明所述基于微控制器设备和微型机器学习的自适用交通调度的系统来实现,基于微控制器设备和微型机器学习,利用不同车辆的轴距和速度进行类别的划分,利用压电条收集的数据进行车辆的分类,利用随机森林根据车辆的情况进行预测。
19.作为优选,传感器数据收集模块利用计算的车辆通过速度进行车辆类型的分组,其中利用两点时间比计算轴距,对车辆进行分类。
20.作为优选,分类的车辆用作同一微控制器汇总预训练随机森林回归模型的输入,再利用训练结果预测信号灯。
21.作为优选,车辆检测模块中,每条车道装有两对压电条。
22.与现有技术相比,本发明的基于微控制器设备和微型机器学习的自适用交通调度的方法具有以下突出的有益效果:所述基于微控制器设备和微型机器学习的自适用交通调度的方法通过嵌入在每条车道上的压电传感器检测车辆情况。利用两点之间时间比率的办法去利用传感器数据识别车辆,并根据检测到的速度对车辆进行分类,具有良好的推广应用价值。
附图说明
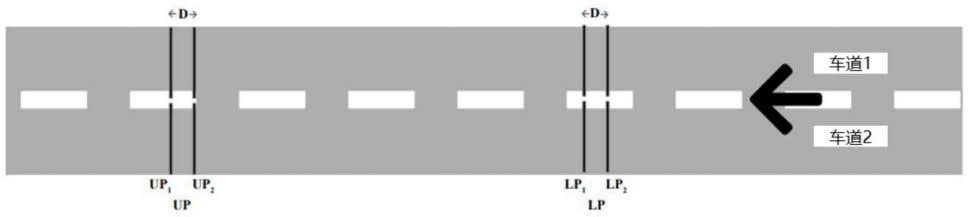
23.图1是本发明所述基于微控制器设备和微型机器学习的自适用交通调度的系统的模型示意图;
24.图2是本发明所述基于微控制器设备和微型机器学习的自适用交通调度的方法的轴距和速度计算示意图。
具体实施方式
25.下面将结合附图和实施例,对本发明的基于微控制器设备和微型机器学习的自适用交通调度的系统及方法作进一步详细说明。
26.实施例
27.本发明的基于微控制器设备和微型机器学习的自适用交通调度的系统,包括传感器放置模块、传感器数据收集模块、车辆检测模型、车辆分类模块和预测信号灯模块。
28.在传感器放置模块上放置两个压电条,采集车辆通过压电条铲车的电压峰值。
29.如图1中,up和lp代表两处压电条的安装,d代表每对压电条的距离。利用车辆通过压电条铲车的电压峰值,会传输到支持tinyml的mcu上面。
30.传感器数据收集模块用于收集数据,计算汽车的轴距识别车辆类型。
31.传感器数据收集模块利用计算的车辆通过速度进行车辆类型的分组,其中利用两点时间比计算轴距,对车辆进行分类。
32.在传感器的数据收集模块,通过收集到的数据,计算汽车的轴距去进行车辆类型的识别,然后利用计算的通过速度进行车辆类型的分组。其中,轴距的计算利用两点时间比的方法进行计算,去对通过的车辆进行分类。分类的车辆计数用作同一微控制器中预训练随机森林回归模型的输入。最后利用训练结果去预测信号灯。
33.车辆检测模块用于车辆的检测和分类。
34.分类的车辆用作同一微控制器汇总预训练随机森林回归模型的输入,再利用训练结果预测信号灯。
35.车辆检测模块中,每条车道都装有2对压电条,即up和lp,有助于车辆的检测和分类。车辆检测模块中,每条车道装有两对压电条。在附图1中,箭头表示交通流的方向。lp用于检测进入车辆,up用于检测离开车辆。接近交通路口的车辆首先穿过lp2,然后穿过lp1。当车辆驶过条带时,会产生电压脉冲。来自lp2和lp1的单个电压脉冲描绘了一个轴交叉lp。当同一辆车越过up2和up1,记录up被激活的时刻。假设有“n”个车轴的车辆接近信号,则记录来自4个条带中的每一个的n个时间戳。相应电压脉冲的时间戳被传递到本地微控制器。
36.车辆分类模块用于根据车辆的轴距和速度,进行车辆的分类。
37.车辆分类模块中,每种车辆的轴距和速度均为固定的,用于车辆的分类。
38.车辆分类模块,每种车辆的轴距和速度都是固定的,用于车辆的分类。出于演示目的,考虑一辆卡车到达交通路口(附图2)的情况。第一个时间戳(t1) 对应于第一个轴穿过lp 2。第二个时间戳(t2)对应于第一个轴穿过lp1。速度的计算为v=d/(t
2-t1)。通过计算的结果就可以对车辆进行分类。同时,为了对车辆进行分类,考虑到一条单车道道路上嵌入了2对传感器,这将产生 4个多时间戳阵列(激活时间),实现以下算法。设lp1的时间戳为一个名为a2 的队列,lp2的时间戳为一个名为a1的队列。
39.a、开始
40.b、创建一个空列表来存储轴距长度;
41.c、如果a1为空,则转步骤i;
42.d、使用a1和a2的第一个输入,计算车辆的速度。a2退出列一次;
43.e、如果a1为空,则转到步骤i;
44.f、该结果与预设值进行比较;
45.g、如果找到匹配,则增加相应类别的车辆计数,a1退出对一次,a2完全退出队列,并从步骤b重复;
46.h、如果未找到匹配项,则从步骤e开始重复;
47.i、停止。
48.预测信号灯模块用于预测在红色信号期间累积的车辆的信号持续时间。
49.预测信号灯模块将每个类别的车辆计数作为输入,并预测车辆通过交叉路口所需的绿色信号的持续时间。
50.在预测信号灯的模块中,预训练的随机森林回归器(rfr)用于预测在红色信号期间累积的车辆的信号持续时间。rfr将每个类别的车辆计数作为输入,并预测车辆通过交叉路口所需的绿色信号的持续时间。rfr模型使用tinyml 库移植到嵌入式设备。随机森林是一种集成技术,能够使用多个决策树和称为引导聚合(通常称为装袋)的技术执行回归和分类任务。在随机森林方法中, bagging涉及在不同的数据样本上训练每个决策树,其中采样是通过替换完成的。这背后的基本思想是结合多个决策树来确定最终输出,而不是依赖于单个决策树。rfr是ml模型的选择,因为它的计算和内存要求较低。最后将模型部署到mcu上面。mcu的输出即为传递给交通灯的预测持续时间。
51.本发明的基于微控制器设备和微型机器学习的自适用交通调度的方法,基于微控
制器设备和微型机器学习的自适用交通调度的系统来实现,基于微控制器设备和微型机器学习,利用不同车辆的轴距和速度进行类别的划分,利用压电条收集的数据进行车辆的分类,利用随机森林根据车辆的情况进行预测。
52.传感器数据收集模块利用计算的车辆通过速度进行车辆类型的分组,其中利用两点时间比计算轴距,对车辆进行分类。分类的车辆用作同一微控制器汇总预训练随机森林回归模型的输入,再利用训练结果预测信号灯。车辆检测模块中,每条车道装有两对压电条。
53.以上所述的实施例,只是本发明较优选的具体实施方式,本领域的技术人员在本发明技术方案范围内进行的通常变化和替换都应包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1