基板贴合装置、制造系统及半导体装置的制造方法与流程
基板贴合装置、制造系统及半导体装置的制造方法
[0001]
[相关申请案]
[0002]
本申请案享有在2019年9月5日提出申请的日本专利申请案2019-162027号的优先权的利益,该日本专利申请案的所有内容援引至本申请案中。
技术领域
[0003]
本实施方式涉及一种基板贴合装置、制造系统及半导体装置的制造方法。
背景技术:
[0004]
基板贴合装置将2块基板吸附在2个吸附台,并将2块基板贴合。此时,较理想为使2块基板精度良好地贴合。
技术实现要素:
[0005]
实施方式提供一种能够使2块基板精度良好地贴合的基板贴合装置、制造系统及半导体装置的制造方法。
[0006]
根据本实施方式,提供一种具有第1吸附台、第2吸附台及对准部的基板贴合装置。第1吸附台吸附第1基板。第2吸附台与第1基板对向配置。第2吸附台吸附第2基板。对准部可插入第1吸附台与第2吸附台之间。对准部具有基座部、第1检测元件及第2检测元件。基座部具有第1主面及第2主面。第2主面为第1主面的相反侧的面。第1检测元件配置在第1主面。第2检测元件配置在第2主面。
附图说明
[0007]
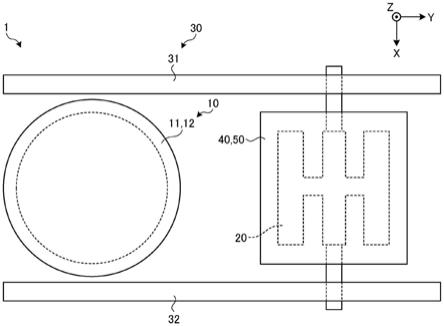
图1是表示实施方式的基板贴合装置的构成的俯视图。
[0008]
图2是表示实施方式的基板贴合装置的构成的侧视图。
[0009]
图3是表示实施方式中的对准部的构成的俯视图。
[0010]
图4是表示实施方式中的对准部的构成的放大剖视图。
[0011]
图5是表示实施方式的基板贴合装置的动作的流程图。
[0012]
图6a~图6c是表示实施方式的基板贴合装置的动作的图。
[0013]
图7a及图7b是表示实施方式的基板贴合装置的动作的图。
[0014]
图8a及图8b是表示实施方式的基板贴合装置的动作的图。
[0015]
图9是表示包含实施方式的变化例的基板贴合装置的制造系统的构成的俯视图。
具体实施方式
[0016]
以下,参考附图详细地对实施方式的基板贴合装置进行说明。此外,本发明并不由该实施方式限定。
[0017]
(实施方式)
[0018]
对实施方式的基板贴合装置进行说明。基板贴合装置将2块基板(例如,2块晶圆)
9按照控制器60的控制,在校准执行位置对校准台50上的基准标记进行拍摄。各检测元件23-1~23-9也可包含ccd影像传感器或cmos影像传感器等摄像机。
[0030]
轨道27在xy俯视下通过基座部21的中央部在y方向上延伸,+y侧的端部与-y侧的端部分别连接在上部基座211的上升部。多个检测元件22-1~22-9可以在轨道27上滑动。轨道27为与轨道24不同的构件,多个检测元件22-1~22-9可与多个检测元件23-1~23-9独立地在主面21a上移动。
[0031]
轨道24在xy俯视下通过基座部22的中央部在y方向上延伸,+y侧的端部与-y侧的端部分别连接在下部基座212的上升部。多个检测元件23-1~23-9可以在轨道24上滑动。轨道24为与轨道27不同的构件,多个检测元件23-1~23-9可与多个检测元件22-1~22-9独立地在主面21b上移动。
[0032]
多个驱动机构25-1~25-3按照控制器60的控制,使多个检测元件22-1~22-9沿着轨道27滑动。多个驱动机构25-1~25-3与多个驱动机构26-1~26-3独立地控制多个检测元件22-1~22-9的驱动。由此,与多个检测元件23-1~23-9不同地驱动多个检测元件22-1~22-9。
[0033]
驱动机构25-1按照控制器60的控制,使检测元件22-1、22-4、22-7沿着轨道27滑动。驱动机构25-2按照控制器60的控制,使检测元件22-2、22-5、22-8沿着轨道27滑动。驱动机构25-3按照控制器60的控制,使检测元件22-3、22-6、22-9沿着轨道27滑动。各驱动机构25-1~25-3例如具有线性马达。各驱动机构25-1~25-3具有设置在检测元件22-1~22-9与轨道27中的一者的可动元件及设置在另一者的固定元件。可动元件与固定元件中的一者具有永久磁铁,另一者具有电磁铁。
[0034]
此外,在多个检测元件22-1~22-9的相对位置关系预先准确地对准的情况下,也可通过1个驱动机构25一起驱动多个检测元件22-1~22-9。
[0035]
多个驱动机构26-1~26-3按照控制器60的控制使多个检测元件23-1~23-9沿着轨道24滑动。多个驱动机构26-1~26-3与多个驱动机构25-1~25-3独立地控制多个检测元件23-1~23-9的驱动。由此,与多个检测元件22-1~22-9不同地驱动多个检测元件23-1~23-9。
[0036]
驱动机构26-1按照控制器60的控制,使检测元件23-1、23-4、23-7沿着轨道24滑动。驱动机构26-2按照控制器60的控制,使检测元件23-2、23-5、23-8沿着轨道24滑动。驱动机构26-3按照控制器60的控制,使检测元件23-3、23-6、23-9沿着轨道24滑动。各驱动机构26-1~26-3例如具有线性马达。各驱动机构26-1~26-3具有设置在检测元件23-1~23-9与轨道24中的一者的可动元件及设置在另一者的固定元件。可动元件与固定元件中的一者具有永久磁铁,另一者具有电磁铁。
[0037]
此外,在多个检测元件23-1~23-9的相对位置关系预先准确地对准的情况下,也可通过1个驱动机构26一起驱动多个检测元件23-1~23-9。
[0038]
引导部30以对准部20能够移行的方式构成。引导部30引导对应于吸附台11及吸附台12的位置(对准执行位置)与对应于校准台40及校准台50的位置(校准执行位置)之间的对准部20的移动。引导部30具有导轨31、导轨32、支撑臂33、驱动机构34、驱动机构35、及驱动机构36。
[0039]
导轨31以将对应于吸附台11及吸附台12的位置(对准执行位置)与对应于校准台
40及校准台50的位置(校准执行位置)之间连接的方式在y方向上延伸。导轨31具有与导轨32大致相同的z高度。导轨31配置在吸附台11及吸附台12的-x侧,且配置在校准台40及校准台50的-x侧。
[0040]
导轨32以将对准执行位置与校准执行位置之间连接的方式在y方向上延伸。导轨32具有与导轨31大致相同的z高度。导轨32配置在吸附台11及吸附台12的+x侧,且配置在校准台40及校准台50的+x侧。
[0041]
支撑臂33在xy俯视下与导轨31及导轨32交叉配置。支撑臂33中,-x侧的端部可沿着导轨31滑动,+x侧的端部可沿着导轨32滑动。另外,支撑臂33以能够在x方向上滑动对准部20(基座部21)的方式支撑在导轨31及导轨32之间。
[0042]
驱动机构34按照控制器60的控制,使基座部21沿着支撑臂33在x方向上滑动。驱动机构34例如具有线性马达。驱动机构34具有设置在基座部21与支撑臂33中的一者的可动元件及设置在另一者的固定元件。可动元件与固定元件中的一者具有永久磁铁,另一者具有电磁铁。
[0043]
另外,驱动机构34按照控制器60的控制,使基座部21绕支撑臂33的轴(绕x轴的旋转方向)旋转。驱动机构34例如还具有旋转马达。
[0044]
驱动机构35按照控制器60的控制,使支撑臂33的-x侧的端部沿着导轨31在y方向上滑动。驱动机构35例如具有线性马达。驱动机构35具有设置在支撑臂33与导轨31中的一者的可动元件及设置在另一者的固定元件。可动元件与固定元件中的一者具有永久磁铁,另一者具有电磁铁。
[0045]
驱动机构36按照控制器60的控制,使支撑臂33的+x侧的端部沿着导轨32在y方向上滑动。驱动机构36例如具有线性马达。驱动机构36具有设置在支撑臂33与导轨32中的一者的可动元件及设置在另一者的固定元件。可动元件与固定元件中的一者具有永久磁铁,另一者具有电磁铁。
[0046]
图2所示的校准台40配置在对准部20位于校准执行位置时应成为对准部20的+z侧的位置。校准台40具有在xy方向上延伸的大致平板形状,在-z侧的主面40a上具有多个校准用基准标记41-1~41-3。
[0047]
校准台50配置在对准部20位于校准执行位置时应成为对准部20的-z侧的位置。校准台50具有在xy方向上延伸的大致平板形状,在+z侧的主面50a上具有多个校准用基准标记51-1~51-3。
[0048]
控制器60总括地控制基板贴合装置1的各部分。例如,如图5~图8b所示一样进行动作。图5是表示基板贴合装置1的动作的流程图。图6a~图8b是表示基板贴合装置1的动作的图。
[0049]
如图6a所示,控制器60将对准部20配置在校准执行位置,开始对准部20的校准(s1)。控制器60利用多个检测元件22对校准台40的多个基准标记41进行拍摄,利用多个检测元件23对校准台50的多个基准标记51进行拍摄。控制器60获得基准标记41的图像,通过图像处理求出距检测元件22的光轴的目标位置的位置偏移量,控制驱动机构25,驱动检测元件22以修正位置偏移量。控制器60获得基准标记51的图像,通过图像处理求出距检测元件23的光轴的目标位置的位置偏移量,控制驱动机构26,驱动检测元件23以修正位置偏移量。
[0050]
此外,此时,也可在吸附台11吸附基板w1,在吸附台12吸附基板w2。
[0051]
如图6b所示,控制器60将对准部20翻转(s2),进行对准部20的校准。控制器60利用多个检测元件23对校准台40的多个基准标记41进行拍摄,利用多个检测元件22对校准台50的多个基准标记51进行拍摄。控制器60获得基准标记41的图像,通过图像处理求出距检测元件23的光轴的目标位置的位置偏移量及校准台40、50间的位置偏移量,控制驱动机构25,驱动检测元件23以修正检测元件23的位置偏移量及校准台40、50间的位置偏移量。控制器60获得基准标记51的图像,通过图像处理求出检测元件22的位置偏移量及校准台40、50间的位置偏移量,控制驱动机构26,驱动检测元件22以修正检测元件22的位置偏移量及校准台40、50间的位置偏移量。
[0052]
控制器60反复s1、s2的处理直至s1、s2中针对各检测元件22、23求出的位置偏移量落在容许范围内(在s3中为ng)。
[0053]
当s1、s2中针对各检测元件22、23求出的位置偏移量落在容许范围内且位置调整为ok(在s3中为ok)时,假定对准部20能够作为对准的基准发挥功能,控制器60将对准部20从校准执行位置移动至对准执行位置(s4)。控制器60控制引导部30,将对准部20从图6c所示的校准执行位置移动至图7a所示的对准执行位置。
[0054]
此外,在图6a、图7a中,例示在各检测元件22成为基座部21的+z侧且各检测元件22成为基座部21的-z侧的姿态下位置调整为ok的情况。于在各检测元件23成为基座部21的+z侧且各检测元件22成为基座部21的-z侧的姿态下位置调整为ok的情况下,对准部20以该姿态从校准执行位置移动至对准执行位置。
[0055]
在贴合部11中,如图7a所示,控制器60控制对准部20,利用检测元件22对基板w1的-z侧的面的接合对象的电极图案进行拍摄,利用检测元件23对基板w2的+z侧的面的接合对象的电极图案进行拍摄。控制器60获得基板w1的电极图案图像及基板w2的电极图案图像,通过图像处理求出基板w1及基板w2之间的位置偏移量,控制吸附台用驱动机构(未图示),如图7b所示,以修正基板w1及基板w2之间的位置偏移量的方式在xy方向上相对地驱动吸附台11及吸附台12。控制器60反复该处理直至所求出的位置偏移量落在容许范围内(在s11中为ng)。由此,可准确地对准基板w1及基板w2。
[0056]
当所求出的位置偏移量落在容许范围内且为对位ok(在s11中为ok)时,假定利用对准部20所进行的对准结束,控制器60将对准部20从对准执行位置退避至校准执行位置(s12)。控制器60控制引导部30,将对准部20从图7b所示的对准执行位置退避至图8a所示的校准执行位置。
[0057]
控制器60控制吸附台用驱动机构(未图示),如图8b所示,使吸附台11向-z方向下降(s13),使基板w1与基板w2接触。由此,基板w1及基板w2贴合(s14)。
[0058]
另一方面,当在s12中将对准部20退避至校准执行位置时,如果没有接下来要利用贴合部10贴合的基板(在s5中为no),那么控制器60使对准部20待机。如果有接下来要利用贴合部10贴合的基板(在s5中为yes),那么控制器60将处理返回至s1,使对准部20对下一基板执行校准。由此,能够与贴合部11中的基板w1、w2的贴合并行且有效率地进行对准部20的校准。
[0059]
如以上所述,在本实施方式中,在基板贴合装置1中,将两面21a、21b配置有检测元件22、23的对准部20在两面21a、21b的检测元件22、23相互对准的状态下插入2个吸附台11、
12之间,利用对准部20的两面21a、21b的检测元件22、23进行2块基板w1、w2的对位。由此,能够将对准部20用作对位的绝对基准,能够直接对准基板w1、w2的接合对象(例如,电极图案)。其结果,能够高速且低成本地实现基板贴合装置1中的2块基板w1、w2的贴合精度的提高。
[0060]
此外,在校准台40中的基准标记41与校准台50中的基准标记51准确地对准的情况下,可省略求出校准台40、50间的位置偏移的处理。在此情况下,也省略图5所示的s2。
[0061]
另外,也可使用基板贴合装置1应用于如图9所示的制造系统sys。图9是表示包含实施方式的变化例的基板贴合装置1的制造系统sys的构成的俯视图。制造系统sys具有多个基板贴合装置1-1~1-6及搬送系统2。各基板贴合装置1-1~1-6可以与实施方式的基板贴合装置1相同的方式构成。搬送系统2以横跨各基板贴合装置1-1~1-6的方式配置。
[0062]
例如,搬送系统2具有在x方向上延伸的搬送轨道2b、及可沿着搬送轨道2b在x方向上移动的搬送机器臂2a。基板贴合装置1-1~1-3配置在搬送系统2的+y侧,并且排列在沿着搬送轨道2b的x方向上。基板贴合装置1-4~1-6配置在搬送系统2的-y侧,并且排列在沿着搬送轨道2b的x方向上。
[0063]
由此,能够在多个基板贴合装置1-1~1-6之间进一步使贴合部11中的基板w1、w2的贴合与对准部20的校准的并行处理并行,因此能够进一步有效率地进行各对准部20的校准。
[0064]
对本发明的若干实施方式进行了说明,但这些实施方式只是作为例子提出的,并不意图限定发明的范围。这些新颖的实施方式能够以其它各种方式实施,能够在不脱离发明的主旨的范围内进行各种省略、替换、变更。这些实施方式及其变化包含于发明的范围及主旨,并且包含于权利要求书中记载的发明及其均等的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1