层叠装置、及层叠电极体的制造装置的制作方法
1.本公开涉及一种层叠装置、及层叠电极体的制造装置。
背景技术:
2.作为车载用等的电池,开发了层叠层压型的电池。该电池具有如下结构:在容器中,收容有层叠电极体和电解液,该层叠电极体夹着间隔件地交替层叠有多个正极和多个负极。
3.关于这种电池,在专利文献1中,公开了一种装置,其用介由破断线连续形成正极的连续正极材料、介由破断线连续形成负极的连续负极材料、以及介由破断线连续形成间隔件的连续间隔件材料作为材料,制造层叠有正极、负极及间隔件的层叠电极体。该制造装置具备如下结构:将重叠有各材料的连续电池材料卷绕于卷绕鼓必要匝,并使卷绕鼓的侧周面的一部分向半径方向突出,由此按每条破断线来切断连续电池材料。
4.[现有技术文献]
[0005]
[专利文献]
[0006]
专利文献1:日本特开2011-86508号公报
技术实现要素:
[0007]
[发明要解决的课题]
[0008]
在上述现有的制造装置中,沿破断线破坏卷绕于鼓的连续电池材料,制造了各层叠电极体。因此,需要在将连续电池材料卷绕必要匝后,每次都停止鼓,并切断连续电池材料,层叠电极体的连续的制造较为困难。因此,层叠电极体制造的高速化较为困难。
[0009]
本公开鉴于这样的状况而完成,其目的之一在于提供一种谋求层叠电极体制造的高速化的技术。
[0010]
[用于解决技术课题的技术方案]
[0011]
本公开的一个方案为一种层叠装置。该层叠装置包括:多个层叠头,其保持单位层叠体,该单位层叠体层叠有间隔件和电极板;鼓部,其将多个层叠头排列并保持在圆周上;鼓驱动部,其使鼓部旋转,从而使各层叠头向与层叠台相对的层叠位置行进;以及多个头驱动部,其使各层叠头与利用鼓部的旋转的移动独立地移动。到达层叠位置的层叠头所对应的头驱动部进行驱动,以抵消利用鼓部的旋转的层叠头的行进,各层叠头将保持的单位层叠体排出到层叠台上,并对多个单位层叠体进行层叠。
[0012]
本公开的另一方案为一种层叠电极体的制造装置。该制造装置包括:第1极切断鼓,其切断多个第1极板的连续体,将其单片化为多个第1极板并输送;第2极切断鼓,其切断多个第2极板的连续体,将其单片化为多个第2极板并输送;粘接鼓,其将多个第1间隔件连续的第1间隔件连续体、从第1极切断鼓供给的多个第1极板、多个第2间隔件连续的第2间隔件连续体、以及从第2极切断鼓供给的多个第2极板按这一顺序层叠并粘接,形成连续层叠体,该连续层叠体中,由第1间隔件、第1极板、第2间隔件及第2极板构成的单位层叠体连续;
间隔件切断鼓,其对连续层叠体的第1间隔件连续体及第2间隔件连续体进行切断,并将其单片化为多个单位层叠体;以及层叠鼓,其由上述方案的层叠装置构成,将多个单位层叠体层叠于层叠台,从而形成层叠电极体。
[0013]
以上构成要素的任意组合、以及将本公开的表达方式在方法、装置、系统等之间转换后的结果,作为本公开的方案也是有效的。
[0014]
发明效果
[0015]
根据本公开,能够谋求层叠电极体制造的高速化。
附图说明
[0016]
图1是实施方式的层叠电极体的制造装置的示意图。
[0017]
图2是示意性地表示实施方式的层叠装置的一部分的剖视图。
[0018]
图3是实施方式的层叠装置的立体图。
[0019]
图4的(a)是鼓驱动部的动作波形图。图4的(b)是头驱动部的动作波形图。图4的(c)是层叠头的动作波形图。
[0020]
图5的(a)~图5的(l)是表示层叠头移动的情况的示意图。
具体实施方式
[0021]
以下,参照附图,基于优选的实施方式来说明本公开。实施方式并不对公开进行限定,仅为例示,实施方式所记述的一切特征及其组合并不都限于公开的实质性内容。对于各附图所示的相同或等同的构成要素、构件、以及处理,标注相同的附图标记,并适当省略重复的说明。此外,各图所示的各部分的比例尺或形状是为了易于说明而便宜设定的,除非特别提及,否则并不被限定性地解释。此外,在本说明书或权利要求中使用“第1”、“第2”等用语的情况下,除非特别提及,否则该用语并不表示任何顺序或重要度,仅用于区别某一构成与其他构成。此外,在各附图中,在对实施方式进行说明上并不重要的构件的一部分会省略显示。
[0022]
图1是实施方式的层叠电极体的制造装置的示意图。层叠电极体的制造装置1为组合有多个鼓的连续鼓式的制造装置。通过以鼓来执行电极体或间隔件的切断、加热、粘接、层叠等各工序,从而能够高速且连续地制造层叠电极体。层叠电极体例如被用于锂离子二次电池。
[0023]
制造装置1包括第1极切断鼓2、第1极加热鼓4、第2极切断鼓6、第2极加热鼓8、粘接鼓10、间隔件切断鼓12、以及层叠鼓14。
[0024]
第1极切断鼓2切断多个第1极板的连续体,将其单片化为多个第1极板并输送。第1极切断鼓2具有第1半径,并围绕中心轴以第1角速度旋转。在本实施方式中,第1极为负极。作为多个第1极板的连续体的、带状的第1极连续体n被供给到第1极切断鼓2。第1极连续体n具有第1极集电体和第1极活性物质层。第1极活性物质层被层叠在第1极集电体上。在本实施方式中,在第1极集电体的两面层叠有第1极活性物质层,但也可以是,仅在第1极集电体的一个面层叠第1极活性物质层。
[0025]
第1极集电体及第1极活性物质层均能够以公知的材料来构成,且均具有公知的结构。第1极集电体例如以由铜或铝等构成的箔或多孔体来构成。第1极活性物质层例如通过
以下方式形成:将包含第1极活性物质、粘结材料及分散剂等的第1极合剂浆料涂布于第1极集电体的表面,干燥涂膜,并进行轧制。第1极集电体的厚度例如为3μm以上50μm以下。第1极活性物质层的厚度例如为10μm以上100μm以下。
[0026]
第1极切断鼓2具有:多个保持头,其被配置在鼓的圆周方向;以及切断刃,其切断第1极连续体n,并将其单片化为多个第1极板。多个保持头具有保持面,该保持面对第1极连续体n进行吸附保持。各保持头的保持面朝向第1极切断鼓2的外侧。被供给到第1极切断鼓2的第1极连续体n在被吸附保持于多个保持头的保持面的状态下,通过第1极切断鼓2的旋转来输送。
[0027]
多个保持头能够分别围绕第1极切断鼓2的中心轴旋转,并且相对于其他保持头彼此独立地沿鼓的圆周方向移动。各保持头的相对移动通过以下方式实现:将与使第1极切断鼓2旋转的电机不同的电机搭载于各保持头。例如,当将在圆周方向上相邻的2个保持头记为第1保持头及第2保持头时,第1保持头及第2保持头因第1极切断鼓2的旋转而围绕鼓的中心轴以一定的速度来旋转。此外,通过保持头的电机的驱动,在鼓的圆周上的预定区间中,2个保持头的相对速度被改变。
[0028]
例如,在某一定时(timing),第1保持头及第2保持头一同以一定的速度旋转,且相对速度为0,但在另一定时,第1保持头向远离后续的第2保持头的方向增速,成为有限的相对速度。通过这样的保持头的独立驱动,利用切断刃的第1极连续体n的切断位置的调整、以及被单片化的第1极板的位置调整等会成为可能。另外,也可以是,在各保持头围绕第1极切断鼓2的中心轴等速地旋转时,将利用各保持头的电机的驱动的各保持头的等速移动追加到利用第1极切断鼓2的旋转的移动中。
[0029]
第1极切断鼓2对被供给的第1极连续体n进行吸附保持,并将其旋转输送,在图1中示意性地示出的切断位置16处,切断第1极连续体n并生成第1极板。第1极连续体n在相邻的保持头之间的位置处被切断刃切断,从而被单片化为多个第1极板。得到的各第1极板在被吸附保持于各保持头的状态下被输送。第1极切断鼓2也可以具备各种照相机。通过这些照相机,能够监视被生成的多个第1极板的位置。另外,作为一例,切断前的第1极连续体n的位置在比第1极切断鼓2靠上游的输送辊处被监视。此外,也可以是,第1极切断鼓2具备对保持头等的位置进行监视的、照相机以外的传感器。
[0030]
第1极加热鼓4被接近第1极切断鼓2地配置。第1极加热鼓4具有第2半径,并围绕中心轴以第2角速度来旋转。第1极加热鼓4的第2半径既可以与第1极切断鼓2的第1半径相同,也可以不同。第1极加热鼓4的第2角速度与第1极切断鼓2的第1角速度不同。此外,第1极加热鼓4的第2角速度被设定为:其线速度与后述的粘接鼓10的线速度大致相同。
[0031]
作为一例,第2半径与第1半径是相同的,第2角速度被设定为比第1角速度更为高速。在该情况下,第1极加热鼓4的线速度>第1极切断鼓2的线速度。因此,第1极切断鼓2的保持头在与第1极加热鼓4的接近位置跟前,会临时地增速到与第1极加热鼓4的线速度大致相同为止。由此,保持头的与第1极加热鼓4的相对速度大致会成为零。保持头在相对速度大致为零的定时,将吸附保持的第1极板排出到第1极加热鼓4侧。保持头在排出第1极板后,会回到增速前的速度。
[0032]
第1极加热鼓4一边对从第1极切断鼓2排出的第1极板进行吸附保持一边旋转,并以内置的加热器来对第1极板进行预备加热。为了在后面的粘接工序中对间隔件与第1极板
进行热粘接,实施预备加热。在本实施方式中,在加热位置18处对第1极板进行加热,但不限于此,例如也可以是,在第1极加热鼓4的圆周方向的全部区域中对第1极板进行加热。
[0033]
第2极切断鼓6切断多个第2极板的连续体,将其单片化为多个第2极板并输送。第2极切断鼓6具有第3半径,并围绕中心轴以第3角速度旋转。在本实施方式中,第2极为正极。作为多个第2极板的连续体的、带状的第2极连续体p被供给到第2极切断鼓6。第2极连续体p具有第2极集电体和第2极活性物质层。第2极活性物质层被层叠在第2极集电体上。在本实施方式中,在第2极集电体的两面层叠有第2极活性物质层,但也可以是,仅在第2极集电体的一个面层叠第2极活性物质层。
[0034]
第2极集电体及第2极活性物质层均能够以公知的材料来构成,且均具有公知的结构。第2极集电体例如以由不锈钢或铝等构成的箔或多孔体来构成。第2极活性物质层例如通过以下方式形成:将包含第2极活性物质、粘结材料及分散剂等的第2极合剂浆料涂布于第2极集电体的表面,干燥涂膜,并进行轧制。第2极集电体的厚度例如为3μm以上50μm以下。第2极活性物质层的厚度例如为10μm以上100μm以下。
[0035]
第2极切断鼓6具有:多个保持头,其被配置在鼓的圆周方向;以及切断刃,其切断第2极连续体p,并将其单片化为多个第2极板。多个保持头具有保持面,该保持面对第2极连续体p进行吸附保持。各保持头的保持面朝向第2极切断鼓6的外侧。被供给到第2极切断鼓6的第2极连续体p在被吸附保持于多个保持头的保持面的状态下,通过第2极切断鼓6的旋转来输送。
[0036]
多个保持头能够分别围绕第2极切断鼓6的中心轴旋转,并且相对于其他保持头彼此独立地沿鼓的圆周方向移动。各保持头的相对移动通过以下方式实现:将与使第2极切断鼓6旋转的电机不同的电机搭载于各保持头。例如,在圆周方向上相邻的第1保持头及第2保持头因第2极切断鼓6的旋转而围绕鼓的中心轴以一定的速度来旋转。此外,通过保持头的电机的驱动,在鼓的圆周上的预定区间中,2个保持头的相对速度被改变。第1保持头及第2保持头的相对速度的变化、以及第2极切断鼓6的旋转与被设置于保持头的电机的驱动的组合与第1极切断鼓2的情况相同。
[0037]
第2极切断鼓6对被供给的第2极连续体p进行吸附保持,并将其旋转输送,在图1中示意性地示出的切断位置20处,切断第2极连续体p并生成第2极板。第2极连续体p在相邻的保持头之间的位置处被切断刃切断,从而被单片化为多个第2极板。得到的各第2极板在被吸附保持于各保持头的状态下被输送。第2极切断鼓6也可以具备各种照相机。通过这些照相机,能够监视被生成的多个第2极板的位置。另外,作为一例,切断前的第2极连续体p的位置在比第2极切断鼓6靠上游的输送辊处被监视。此外,也可以是,第2极切断鼓6具备对保持头等的位置进行监视的、照相机以外的传感器。
[0038]
第2极加热鼓8被接近第2极切断鼓6地配置。第2极加热鼓8具有第4半径,并围绕中心轴以第4角速度来旋转。第2极加热鼓8的第4半径既可以与第2极切断鼓6的第3半径相同,也可以不同。第2极加热鼓8的第4角速度与第2极切断鼓6的第3角速度不同。此外,第2极加热鼓8的第4角速度被设定为:其线速度与粘接鼓10的线速度大致相同。
[0039]
作为一例,第4半径与第3半径是相同的,第4角速度被设定为比第3角速度更为高速。在该情况下,第2极加热鼓8的线速度>第2极切断鼓6的线速度。因此,第2极切断鼓6的保持头在与第2极加热鼓8的接近位置跟前,会临时地增速到与第2极加热鼓8的线速度大致
相同为止。由此,保持头的与第2极加热鼓8的相对速度大致会成为零。保持头在相对速度大致为零的定时,将吸附保持的第2极板排出到第2极加热鼓8侧。保持头在排出第2极板后,会回到增速前的速度。
[0040]
第2极加热鼓8一边对从第2极切断鼓6排出的第2极板进行吸附保持一边旋转,并以内置的加热器来对第2极板进行预备加热。为了在后面的粘接工序中对间隔件与第2极板进行热粘接,实施预备加热。在本实施方式中,在加热位置22处对第2极板进行加热,但不限于此,例如也可以是,在第2极加热鼓8的圆周方向的全部区域中对第2极板进行加热。
[0041]
粘接鼓10形成连续层叠体,该连续层叠体中,由第1间隔件、第1极板、第2间隔件及第2极板构成的单位层叠体连续。粘接鼓10被接近第1极加热鼓4及第2极加热鼓8地配置。粘接鼓10具有第5半径,并围绕中心轴以第5角速度来旋转。多个第1间隔件连续的、带状的第1间隔件连续体s1和多个第2间隔件连续的、带状的第2间隔件连续体s2被供给到粘接鼓10。在第1间隔件连续体s1及第2间隔件连续体s2各自的表面,设置有热粘接层。热粘接层具有如下性质:在室温下不会表现出粘接性,而通过加热会表现出粘接性。例如,热粘接层为含有热塑性聚合物的热塑性层,基于加热所导致的热塑性聚合物的塑性变形来表现出粘接性。
[0042]
此外,多个第1极板被从第1极切断鼓2介由第1极加热鼓4供给到粘接鼓10,多个第2极板被从第2极切断鼓6介由第2极加热鼓8供给到粘接鼓10。第1极板一边被第1极加热鼓4预备加热一边被旋转输送,并在第1极加热鼓4与粘接鼓10的接近位置处被排出到粘接鼓10侧。第2极板一边被第2极加热鼓8预备加热一边被旋转输送,并在第2极加热鼓8与粘接鼓10的接近位置处被排出到粘接鼓10侧。
[0043]
第1间隔件连续体s1、第1极板、第2间隔件连续体s2及第2极板相对于粘接鼓10的供给位置从粘接鼓10的旋转方向的上游侧起,按列举的顺序排列。因此,首先,在预定位置处,第1间隔件连续体s1被供给到粘接鼓10。第1间隔件连续体s1被吸附保持于粘接鼓10,并被旋转输送。接着,在比第1间隔件连续体s1的供给位置靠下游侧处,第1极板被从第1极加热鼓4供给到粘接鼓10,并被载置在第1间隔件连续体s1上。多个第1极板沿第1间隔件连续体s1的输送方向隔开预定的间隔地被排列在第1间隔件连续体s1上。
[0044]
接着,在比第1极板的供给位置靠下游侧处,第2间隔件连续体s2被供给到粘接鼓10,并被载置在多个第1极板上。接着,在比第2间隔件连续体s2的供给位置靠下游侧处,第1间隔件连续体s1、多个第1极板及第2间隔件连续体s2被热压接辊24加压。由此,第1间隔件连续体s1、各第1极板及第2间隔件连续体s2被粘接。接着,在比压接辊24的压接位置靠下游侧处,第2极板被从第2极加热鼓8供给到粘接鼓10,并被载置在第2间隔件连续体s2上。多个第2极板沿第2间隔件连续体s2的输送方向隔开预定的间隔地被排列在第2间隔件连续体s2上。此外,多个第2极板被第2极加热鼓8的按压力粘接于第2间隔件连续体s2。
[0045]
通过以上的工序,第1间隔件连续体s1、多个第1极板、第2间隔件连续体s2及多个第2极板按该顺序被层叠、粘接,形成连续层叠体26。连续层叠体26具有如下结构:由第1间隔件、第1极板、第2间隔件及第2极板构成的单位层叠体由第1间隔件连续体s1及第2间隔件连续体s2连接,从而连续。连续层叠体26被从粘接鼓10输送到间隔件切断鼓12。另外,由于第2极板不会被从第2极切断鼓6侧供给,因而也可以按每一定个数生成不含第2极板的3层结构的单位层叠体。此外,不被供给的电极板也可以为第1极板。
[0046]
间隔件切断鼓12对连续层叠体26的第1间隔件连续体s1及第2间隔件连续体s2进行切断,将其单片化为多个单位层叠体。间隔件切断鼓12具有第6半径,并围绕中心轴以第6角速度旋转。间隔件切断鼓12具有:多个保持头,其被配置在鼓的圆周方向;以及切断刃,其切断连续层叠体26,将其单片化为多个单位层叠体。多个保持头具有保持面,该保持面对连续层叠体26进行吸附保持。各保持头的保持面朝向间隔件切断鼓12的外侧。被供给到间隔件切断鼓12的连续层叠体26以被吸附保持于多个保持头的保持面的状态,通过间隔件切断鼓12的旋转来输送。
[0047]
也可以是,多个保持头能够分别围绕间隔件切断鼓12的中心轴旋转,并且相对于其他保持头彼此独立地沿鼓的圆周方向移动。各保持头的相对移动通过以下方式来实现:将与使间隔件切断鼓12旋转的电机不同的电机搭载于各保持头。例如,在圆周方向上相邻的第1保持头及第2保持头因间隔件切断鼓12的旋转而围绕鼓的中心轴以一定的速度来旋转。此外,通过保持头的电机的驱动,在鼓的圆周上的预定区间中,2个保持头的相对速度被改变。第1保持头及第2保持头的相对速度的变化、以及间隔件切断鼓12的旋转与被设置于保持头的电机的驱动的组合,与第1极切断鼓2的情况相同。
[0048]
间隔件切断鼓12对被供给的连续层叠体26进行吸附保持,将其旋转输送,并在图1中示意性地示出的切断位置28处切断连续层叠体26,生成单位层叠体。连续层叠体26在相邻的保持头之间的位置被切断刃切断,被单片化为多个单位层叠体。此时,连续层叠体26中,在连续层叠体26的输送方向上相邻的电极板之间,第1间隔件连续体s1及第2间隔件连续体s2被切断。得到的各单位层叠体在被吸附保持于各保持头的状态下被输送。保持头将吸附保持的单位层叠体排出到层叠鼓14侧。间隔件切断鼓12也可以具备各种照相机。通过这些照相机,能够对被生成的多个单位层叠体的位置进行监视。另外,作为一例,切断前的连续层叠体26的位置在比间隔件切断鼓12靠上游的输送辊处被监视。此外,也可以是,间隔件切断鼓12具备对保持头的位置等进行监视的、照相机以外的传感器。
[0049]
层叠鼓14将多个单位层叠体层叠于层叠台30,形成层叠电极体。层叠鼓14具有第7半径,并围绕中心轴以第7角速度来旋转。层叠鼓14具有被沿鼓的圆周方向配置的多个层叠头。各层叠头具有吸附保持单位层叠体的保持面。各层叠头的保持面朝向层叠鼓14的外侧。多个层叠头能够分别围绕层叠鼓14的中心轴旋转,并且相对于其他层叠头彼此独立地沿鼓的圆周方向移动。各层叠头的相对移动如后所述,通过以下方式来实现:将与使层叠鼓14旋转的电机不同的电机搭载于各层叠头。各层叠头106在到达与层叠台30相对的层叠位置时,将保持的单位层叠体排出到层叠台30侧。
[0050]
层叠台30被配置在层叠鼓14的正下方。在层叠台30,依次层叠有从层叠鼓14排出的单位层叠体。由此,层叠电极体被形成。层叠台30能够沿彼此正交的x轴方向及y轴方向驱动。此外,层叠台30能够调整x-y平面上的倾斜角。由此,相对于已经被层叠于层叠台30的单位层叠体的、从层叠鼓14排出的单位层叠体的x轴方向及y轴方向的位置、以及倾斜角会被调整。层叠台30在4角具备爪,被层叠的多个单位层叠体由这些爪来按压固定。此外,被层叠的多个单位层叠体被加压及/或加热,并被彼此粘接。
[0051]
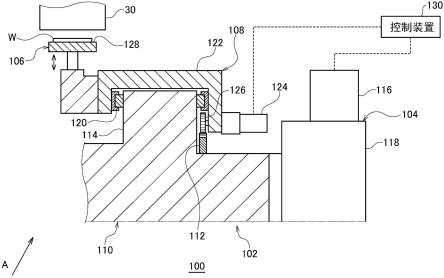
层叠鼓14由以下说明的本实施方式的层叠装置100来构成。图2是示意性地表示实施方式的层叠装置100的一部分的剖视图。图3是实施方式的层叠装置100的立体图。图2图示了层叠装置100的截面的一半。图3图示了从图2的箭头a方向观察到的层叠装置100。
[0052]
构成层叠鼓14的层叠装置100包括鼓部102、鼓驱动部104、多个层叠头106、以及多个头驱动部108。鼓部102将多个层叠头106排列并保持在圆周上。鼓驱动部104使鼓部102旋转,从而使各层叠头106向与层叠台30相对的层叠位置行进。头驱动部108使各层叠头106与利用鼓部102的旋转的移动独立地移动。
[0053]
鼓部102具有旋转轴部110、大齿轮112、以及凸缘部114。鼓驱动部104具有电机116和轴基座118。旋转轴部110例如为圆筒状或圆柱状,一端介由轴基座118而连结于电机116。对于电机116,能够使用公知的电机。旋转轴部110因电机116的驱动而旋转。旋转轴部110相当于层叠鼓14的中心轴。大齿轮112被固定于旋转轴部110。本实施方式的大齿轮112被固定于旋转轴部110的外周面。此外,被设置为遍及旋转轴部110的整周。凸缘部114相对于旋转轴部110的轴方向垂直地突出。凸缘部114为圆盘状,并被设置为遍及旋转轴部110的整周。在凸缘部114的周缘部,铺设有圆弧引导件120。
[0054]
多个头驱动部108被沿凸缘部114的圆周方向排列。各头驱动部108具有托架122、电机124、以及小齿轮126。托架122在剖视下为大致“u”字状,并介由圆弧引导件120而夹入凸缘部114的缘。电机124被支撑于托架122。作为电机124,能够使用公知的电机。小齿轮126被连结于电机124的旋转轴,并因电机124的驱动而旋转。小齿轮126与被固定于旋转轴部110侧的大齿轮112啮合。当电机124进行驱动时,驱动扭矩会被传递到与小齿轮126啮合的大齿轮112。由此,各头驱动部108能够分别独立地沿着圆弧引导件120在凸缘部114的圆周上移动。
[0055]
多个层叠头106分别被支撑于头驱动部108。因此,多个层叠头106被沿凸缘部114的圆周方向排列。当旋转轴部110旋转时,旋转扭矩会被传递到与大齿轮112啮合的小齿轮126。由此,各层叠头106会以旋转轴部110为中心旋转。此外,各层叠头106能够通过头驱动部108而与利用鼓部102的旋转的移动不同地移动。
[0056]
例如,在鼓部102的圆周方向上相邻的第1层叠头及第2层叠头因鼓部102的旋转,围绕鼓部102的中心轴以一定的速度来旋转,并且在鼓部102的圆周上的预定区间中,彼此的相对速度被改变。例如,在某一定时,第1层叠头及第2层叠头会一同以一定的速度旋转,且相对速度为0,而在另一定时,第1层叠头会向远离后续的第2层叠头的方向增速,成为有限的相对速度。另外,也可以是,在各层叠头106围绕鼓部102的中心轴等速地旋转时,将基于头驱动部108的驱动的各层叠头106的等速移动追加到基于鼓部102的旋转的移动中。针对各驱动部的动作,会在后面详细叙述。
[0057]
各层叠头106具有保持面128,该保持面128朝向鼓部102的圆周的外侧。保持面128被配置在距鼓部102的中心第7半径的位置。在保持面128,设置有吸附孔(未图示),该吸附孔用于吸附保持单位层叠体w。通过从吸附孔吸引空气,单位层叠体w被其吸引力吸附保持。单位层叠体w具有层叠有间隔件和电极板的结构。本实施方式的单位层叠体w如上所述,由第1间隔件、第1极板、第2间隔件及第2极板构成。单位层叠体w在被吸附保持于各层叠头106的保持面128的状态下,通过鼓部102的旋转或通过头驱动部108的移动来输送。
[0058]
鼓驱动部104及头驱动部108的动作通过控制装置130来控制。关于控制装置130,作为硬件构成,通过以计算机的cpu及存储器为代表的元件或电路来实现,作为软件构成,通过计算机程序等来实现,而在图2中,描绘为通过它们的协作来实现的功能框。本领域技术人员当然应理解的是,该功能框能够通过硬件及软件的组合来以各种形式实现。
[0059]
控制装置130能够从拍摄层叠鼓14的照相机接收图像数据,并基于从图像数据导出的各层叠头106的位置等来控制各部分的动作。另外,也可以是,控制装置130也从照相机以外的传感器取得信息,从而控制各部分的动作。此外,层叠装置100也能够基于预先设定的动作程序来使各部动作。
[0060]
在单位层叠体w的层叠工序中,各部分的动作被如下地控制。图4的(a)是鼓驱动部104的动作波形图。图4的(b)是头驱动部108的动作波形图。图4的(c)是层叠头106的动作波形图。图4的(a)~图4的(c)的横轴为时间(相对值),纵轴为速度。图5的(a)~图5的(l)是表示层叠头106移动的情况的示意图。在图5的(a)~图5的(l)中,着眼于预定的层叠头106a的动作。此外,时间按图5的(a)~图5的(l)的顺序经过,连续2张图的时间间隔是均等的。
[0061]
图5的(a)~图5的(d)表示图4的(b)及图4的(c)的时间t2时的层叠头106a的情况。图5的(e)~图5的(h)表示图4的(b)及图4的(c)的时间t3时的层叠头106a的情况。图5的(i)~图5的(l)表示图4的(b)及图4的(c)的时间t4时的层叠头106a的情况。
[0062]
通过鼓驱动部104像图4的(a)所示的动作波形那样进行驱动,鼓部102连续地等速旋转。此外,如图4的(b)所示,头驱动部108在时间t1,重复向与旋转轴部110的旋转方向相同的方向(正向)的等速驱动。由此,如图4的(c)所示,层叠头106a在时间t1,通过鼓部102的旋转和鼓驱动部104的移动来等速地输送,不断接近层叠台30。另外,在时间t1中,层叠头106a的线速度会与间隔件切断鼓12的线速度大致相同,从间隔件切断鼓12排出的单位层叠体w会被吸附于层叠头106。
[0063]
头驱动部108在对应的层叠头106a相对于层叠台30接近到预定距离时,沿鼓部102的旋转方向使层叠头106a的移动加速。即,如图4的(b)及图4的(c)所示,头驱动部108在时间t2中提高输出,使层叠头106a加速,从而使其接近层叠台30。由此,如图5的(a)~图5的(d)所示,层叠头106a与后续的层叠头106b的距离会扩大。结果,能够得到使层叠头106a停止于层叠位置的时间。
[0064]
与到达层叠位置的层叠头106a对应的头驱动部108进行驱动,以抵消利用鼓部102的旋转的层叠头106a的行进。即,如图4的(b)所示,头驱动部108在时间t3时,向鼓部102的旋转方向的反方向行进。换言之,头驱动部108使电机124沿反方向旋转。由此,基于头驱动部108的层叠头106a的移动方向会与基于鼓驱动部104的层叠头106a的移动方向相反,如图4的(c)所示,层叠头106a的移动速度会成为0。结果,如图5的(e)~图5的(h)所示,层叠头106a会停止在层叠位置。
[0065]
层叠头106a在停止于层叠位置的期间,会将所保持的单位层叠体w排出到层叠台30上。层叠头106在层叠位置处向层叠台30前进,在将单位层叠体w排出到层叠台30后从层叠台30后退。通过在鼓部102的圆周方向上的层叠头106的移动停止的状态下,将单位层叠体w排出到层叠台30上,从而能够以较高的位置精度将单位层叠体w排出到层叠台30上。
[0066]
头驱动部108在对应的层叠头106a将单位层叠体w排出后,沿鼓部102的旋转方向使层叠头106a的移动加速。即,如图4的(b)及图4的(c)所示,头驱动部108在时间t4时提高输出,使层叠头106a加速,并使其从层叠台30退避。由此,如图5的(i)~图5的(l)所示,能够允许后续的层叠头106b向层叠位置一边加速一边进入。时间t4时的头驱动部108的输出被设定为比时间t1时的头驱动部108的输出更大。
[0067]
此外,在本实施方式的层叠装置100中,例如在将鼓部102的圆周16分割,并将16个
层叠头106搭载于鼓部102的尺寸设计中,搭载有12个层叠头106。像这样,能够通过使配置在鼓部102的圆周上的层叠头106的数量比设计上可配置的最大数量更少,从而扩大相邻的层叠头106间的间隙。由此,任意的层叠头106都能够扩大可相对于相邻的层叠头106而相对地加减速的区域。因此,能够在层叠位置的前后使层叠头106加减速时,使速度变化变缓。
[0068]
如以上说明的那样,本实施方式的层叠装置100包括:多个层叠头106,其保持层叠有间隔件和电极板的单位层叠体w;鼓部102,其将多个层叠头106排列并保持在圆周上;鼓驱动部104,其使鼓部102旋转,并使各层叠头106向与层叠台30相对的层叠位置行进;以及多个头驱动部108,其使各层叠头106与利用鼓部102的旋转的移动独立地移动。与到达层叠位置的层叠头106对应的头驱动部108进行驱动,以抵消利用鼓部102的旋转的层叠头106的行进,各层叠头106将保持的单位层叠体w排出到层叠台30上,并对多个单位层叠体w进行层叠。
[0069]
即,层叠装置100包括:鼓驱动部104,其反复输出预定的动作波形;多个层叠头106,其沿因鼓驱动部104而旋转的鼓部102(主轴)的周向排列,并保持单位层叠体w;以及头驱动部108,其使多个层叠头106自走。在层叠装置100中,通过对鼓驱动部104及头驱动部108各自的动作波形进行合成,得到层叠头106的动作波形。然后,头驱动部108进行动作,使得基于鼓驱动部104的层叠头106的移动在层叠位置处被抵消,从而使层叠头106的速度成为0。
[0070]
像这样,通过将鼓部102的旋转与头驱动部108的移动进行组合,使层叠头106停止于层叠位置,从而能够不必停止除层叠位置外的区域中的单位层叠体w的输送,就在层叠位置中局部地使单位层叠体w停止,并将其层叠于层叠台30。因此,能够使层叠电极体的制造速度高速化。此外,因为能够以较高的位置精度将单位层叠体w层叠于层叠台30,所以能够形成质量更高的层叠电极体。
[0071]
作为使层叠头106停止的方法,例如考虑在凸缘部114的周缘部设置凸轮机构。然而,在通过凸轮机构使层叠头106停止的情况下,会存在如下风险:在停止时,会对层叠头106施加较大冲击。在该情况下,振动会残留,从而高位置精度下的层叠会变得困难。或者,当等待振动收敛时,层叠电极体的制造速度会降低。此外,为了能耐受层叠头106停止时产生的冲击,需要提高各部分的刚性。尤其是,当要谋求层叠电极体制造的进一步高速化时,利用鼓部102的旋转的层叠头106的移动速度会上升,停止时的冲击会进一步变大。因此,所需的刚性也会变高。此外,在设置凸轮机构的情况下,也会招致结构的复杂化或部件数量的增加。
[0072]
与此不同,能够通过利用头驱动部108来使层叠头106逆行,使其与利用鼓部102的旋转的移动抵消,从而抑制使层叠头106停留于层叠位置时产生的冲击。因此,能够一边谋求制造设备的简化,一边谋求层叠电极体制造的高速化。
[0073]
此外,头驱动部108在对应的层叠头106相对于层叠台30而接近到预定距离时,会沿鼓部102的旋转方向使层叠头106的移动加速。由此,能够拖延层叠位置处的层叠头106的停止时间,因此能够使层叠电极体的制造速度进一步高速化。此外,能够进一步提高层叠电极体的质量。
[0074]
此外,头驱动部108在对应的层叠头106将单位层叠体w排出后,会沿鼓部102的旋转方向使层叠头106的移动加速。由此,能够使后续的层叠头106更顺畅地进入到层叠位置。
因此,能够使层叠电极体的制造速度进一步高速化。
[0075]
此外,本实施方式的层叠电极体的制造装置1包括:第1极切断鼓2,其切断多个第1极板的连续体,将其单片化为多个第1极板并输送;第2极切断鼓6,其切断多个第2极板的连续体,将其单片化为多个第2极板并输送;粘接鼓10,其将多个第1间隔件连续的第1间隔件连续体s1、从第1极切断鼓2供给的多个第1极板、多个第2间隔件连续的第2间隔件连续体s2、以及从第2极切断鼓6供给的多个第2极板按该顺序层叠并粘接,形成连续层叠体26,该连续层叠体26中,由第1间隔件、第1极板、第2间隔件及第2极板构成的单位层叠体w连续;间隔件切断鼓12,其对连续层叠体26的第1间隔件连续体s1及第2间隔件连续体s2进行切断,将其单片化为多个单位层叠体w;以及层叠鼓14,其由本实施方式的层叠装置100构成,并将多个单位层叠体w层叠于层叠台30,形成层叠电极体。由此,能够谋求兼顾层叠电极体乃至电池的质量提高与吞吐量提高。
[0076]
以上,针对本公开的实施方式详细进行了说明。前述实施方式仅表示实施本公开时的具体例。实施方式的内容并不对本公开的技术的范围进行限定,能够在不脱离权利要求书所规定的本公开的思想的范围内,进行构成要素的变更、追加、删除等许多设计变更。加有了设计变更的新实施方式兼具被组合的实施方式及变形各自的效果。在前述的实施方式中,关于能够进行这样的设计变更的内容,附加了“本实施方式的”、“在本实施方式中”等表述来进行强调,但在没有该种表述的内容中,也允许设计变更。以上构成要素的任意组合作为本公开的方案也是有效的。附加于附图的截面的阴影并不会限定附加了阴影的对象的材质。
[0077]
[工业可利用性]
[0078]
本公开能够利用于层叠装置、及层叠电极体的制造装置。
[0079]
[附图标记说明]
[0080]
1制造装置、2第1极切断鼓、6第2极切断鼓、10粘接鼓、12间隔件切断鼓、14层叠鼓、26连续层叠体、30层叠台、100层叠装置、102鼓部、104鼓驱动部、106、108头驱动部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1