一种开关的操作机构的制作方法
1.本实用新型属于开关电器技术领域,具体涉及一种开关的操作机构。
背景技术:
2.前述开关的典型的例子如断路器。断路器在分合闸操作中,特别是在电路正常带载操作中,为了尽可能减轻触头对的触点间电弧对触点产生的烧蚀影响,通常期望动触点能快速地与静触点接触或分离。
3.如业界所知,断路器通过操作手柄组件改变机构主弹簧对操作机构的结构体系的四连杆的作用力矩方向而实现合/分闸。在合闸过程中,前述操作机构的结构体系的四连杆只受主弹簧作用,当扳动手柄组件使主弹簧对操作机构四连杆作用力矩变向后,操作机构四连杆只受到主弹簧施加的向合闸方向运动的力矩,有利于断路器的合闸操作。
4.图3所示为已有技术中的开关的操作机构在合闸状态下的示意图。肘节连杆2的结构体系的共同铰接于连杆铰接轴23的上连杆21与下连杆22之间的夹角α显著小于180
°
,主弹簧(图中未示出)对操作机构四连杆施加顺时针方向的作用力矩,触头弹簧对操作机构四连杆施加的力f形成逆时针方向的作用力矩。合闸方向力矩大于分闸方向力矩,通过限位而使断路器的操作机构处于合闸状态。当断路器进行分闸操作时,推动手柄组件顺时针方向转动,上面提及的主弹簧的主弹簧作用力f3方向与上连杆21的上连杆铰接点211和上下连杆的铰接点(连杆铰接轴23的转动中心)之间的夹角变小,主弹簧对操作机构四连杆施加顺时针合闸方向的作用力减小,当其减小到小于触头弹簧对操作机构四连杆施加逆时针分闸方向的作用力矩时,操作机构四连杆开始向分闸方向运动。当触头走完超程,触头弹簧对操作机构四连杆施加逆时针分闸方向的作用力矩消失,若此时主弹簧对操作机构四连杆施加的作用力矩没有转变成逆时针分闸作用方向,则此时操作机构将做减速运动,降低断路器分闸速度,更有甚者动静触点将重新接通,延长动静触点间电弧燃烧时间,增加断路器触点烧蚀风险。鉴于前述情形,有必要加以合理改进,下面将要介绍的技术方案便是在这种背景下产生的。
技术实现要素:
5.本实用新型的任务在于提供一种在分闸过程中并在操作机构四连杆开始运动后能使主弹簧对操作机构四连杆的作用力矩始终为分闸方向而得以避免分闸过程中出现减速运动并且得以保障理想的分闸速度的开关的操作机构。
6.本实用新型的任务是这样来完成的,一种开关的操作机构,包括手柄组件、肘节连杆、主弹簧和转轴,所述肘节连杆由彼此铰接的上连杆以及下连杆构成,主弹簧挂置在手柄组件和肘节连杆之间,下连杆与转轴铰接,驱动手柄组件在分闸与合闸之间动作,从而由转轴带动触头分离或闭合,在所述触头处于闭合位置时,所述上连杆与下连杆之间的夹角为178.5~181.5
°
。
7.在本实用新型的一个具体的实施例中,所述上连杆与所述下连杆的相向一端共同
铰接于所述连杆铰接轴上,所述主弹簧挂置在所述连杆铰接轴上。
8.在本实用新型的另一个具体的实施例中,所述操作机构还包括机构侧板和解锁组件,所述手柄组件以及解锁组件分别枢设在所述机构侧板上,所述上连杆与解锁组件铰接。
9.在本实用新型的又一个具体的实施例中,所述的解锁组件包括分别铰接在机构侧板上的跳扣和锁扣,所述的上连杆铰接在跳扣上。
10.本实用新型提供的技术方案的技术效果在于,由于将肘节连杆的结构体系的上连杆与下连杆之间的夹角的角度合理地设置成在触头处于闭合位置时的178.5
°
至181.5
°
的范围,因而使开关在分闸过程中,操作机构四连杆开始运动后,主弹簧对操作机构四连杆的作用力矩始终为分闸方向,避免分闸过程中操作机构出现减速运动,得以保障理想的分闸速度。
附图说明
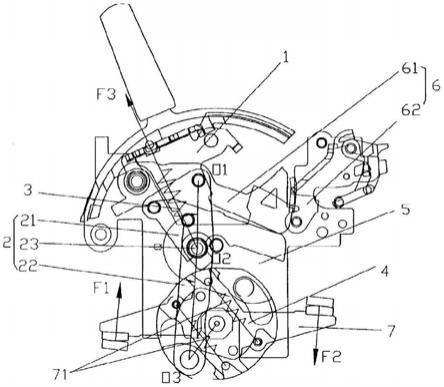
11.图1为本实用新型的开关的操作机构在合闸状态下的示意图。
12.图2为图1所示状态下的肘节连杆的结构体系的上连杆与下连杆两者之间的关系的示意图。
13.图3为已有技术中的开关的操作机构在合闸状态下的上连杆与下连杆两者之间的关系的示意图。
具体实施方式
14.请参见图1和图2,本实用新型的开关包括操作机构和触头系统,开关可以是只具有两个位置即分闸位置、合闸位置的电气设备,比如隔离开关等,也可以是具有合分闸位置外还包括脱扣位置的断路器等。
15.在前述的只具有两个位置的开关中,其操作机构包括机构侧板5、手柄组件1、肘节连杆2、主弹簧3和转轴4,其中,肘节连杆2由上连杆21和下连杆22通过连杆铰接轴23彼此铰接构成,也就是说上、下连杆21、22的相向一端共同地铰接于连杆铰接轴23上,上连杆21的一端铰接在机构侧板5上,下连杆22的一端与转轴4铰接,手柄组件1枢设在机构侧板5上,主弹簧3的两端分别挂置在手柄组件1和连杆铰接轴23上。驱动手柄组件 1在分闸和合闸位置之间动作,带动主弹簧3储能,主弹簧3运动过死点位置后释放能量,拉动连杆铰接轴23,从而带动下连杆22,由此带动转轴4转动,带动开关的动触头与静触头分离和闭合。
16.对于断路器,如图1所示,除了上述部件,能够通过手柄组件1驱动进行触头的分合闸外,其操作机构还包括解锁组件6,解锁组件6包括分别铰接在机构侧板5上的跳扣61和锁扣62,上连杆21铰接在跳扣61上,当断路器所在线路发生故障时,断路器内部的脱扣器动作,触动锁扣62转动,使得锁扣62解除与跳扣61之间的限位关系,释放跳扣61,跳扣61转动,主弹簧3释放能量,带动肘节连杆2动作,从而带动转轴4转动,使得触头系统的动静触头分离,断路器达到脱扣位置,分断电路。
17.由图1所示,前述的触头系统包括动触头7和静触头,动触头7穿设在转轴4上,且动触头7与转轴4之间设置有触头弹簧71。
18.作为本实用新型提供的技术方案的技术要点:当触头处于闭合位置时,上连杆21和下连杆22之间的夹角α为180
º±
1.5
º
,即为如图1和图2。在图2中示出了上连杆21的上连
杆铰接点211。
19.断路器在合闸状态,肘节连杆2中上、下连杆21、22的夹角α无限接近180
º
时,主弹簧3对操作机构四连杆(上连杆转动中心、上下连杆铰接点、下连杆和转轴铰接点、动静触点接触位置四个点之间连线构成的四连杆结构)施加顺时针合闸方向的作用力矩,触头弹簧71对操作机构四连杆施加的力f即作用力(图示双断点触头系统中,两个静触头的反作用力f1和f2的合力)经过转动中心,因此基本无作用力矩。当断路器进行分闸操作时,推动手柄组件1顺时针方向转动,随着手柄组件1的转动,主弹簧3对机构四连杆施加顺时针合闸方向的作用力矩会逐渐减小,当主弹簧对机构四连杆的作用力矩由顺时针方向变为逆时针方向时,断路器机构向分闸方向运动,在整个分闸运动过程中,主弹簧3对机构作用力矩一直保持逆时针分闸方向。机构始终保持加速运动。
20.由于加工精度等原因,闭合位置时,上下连杆之间的夹角不能保证180
º
,故考虑到实际加工情况将夹角α定为180
º±
1.5
º
。
21.在合闸状态,当夹角α在178.5
º
至180
º
时,主弹簧3对操作机构四连杆施加合闸方向作用力矩,触头弹簧71对操作机构四连杆施加的力f使四连杆向分闸方向运动,机构被限位部件限位,保持合闸位置。当断路器进行分闸操作时,推动手柄组件1顺时针方向转动,主弹簧作用力f3作用力方向逐渐向上连杆21靠拢,对操作机构四连杆合闸方向作用力矩逐渐减小。当其值减小至小于触头弹簧71对机构四连杆施加的分闸方向作用力矩时,机构向分闸方向运动,由于上下连杆夹角非常接近180
º
,四连杆开始运动后,主弹簧3对机构四连杆作用力矩马上变为逆时针的分闸运动方向。
22.在合闸状态,当夹角α在180
º
至181.5
º
时,主弹簧3对操作机构四连杆施加分闸方向作用力矩,触头弹簧71对操作机构四连杆施加的作用力f对操作机构四连杆施加分闸方向的作用力矩,此时机构被限位部件限位,保持合闸位置。
23.当断路器进行分闸操作时,推动手柄组件1顺时针方向转动,主弹簧3对操作机构四连杆分闸方向作用力矩首先逐渐减小。当主弹簧作用力方向转过上连杆,其对操作机构四连杆作用力矩方向由分闸方向变合闸方向。由于其值大于触头弹簧71对操作机构四连杆施加的分闸方向力矩,上下连杆夹角α逐渐变小至180
º
,转轴4向合闸方向有一个微小的转动,当上下连杆夹角α变为小于180
º
,主弹簧3对操作机构四连杆作用力矩变为分闸方向,触头弹簧71力对机构四连杆作用力方向仍为分闸方向,操作机构向分闸方向运动,在分闸过程机构始终保持加速运动。
24.综上所述,本实用新型提供的技术方案弥补了已有技术中的缺憾,顺利地完成了发明任务,如实地兑现了申请人在上面的技术效果栏中载述的技术效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1