用于晶圆搬运的自动倒片机的制作方法
1.本实用新型涉及晶圆搬运领域,具体涉及一种用于晶圆搬运的自动倒片机。
背景技术:
2.在半导体制造行业中,为了便于大量的存放晶圆,每片盒能够装有50片晶圆,当需要进行不同工艺时,50片层之间的间隙过小,无法对晶圆进行快速的使用,生产效率过低。此时,需要将50片装均分为两个25片装,保证了每片装之间的间隙较大且相同,从而便于后续工位的使用。
技术实现要素:
3.为解决上述技术问题,本实用新型提供了一种用于晶圆搬运的自动倒片机,采用该倒片机能够快速的将花篮内的晶圆进行交错提取,保证了晶圆之间的距离足够大,从而便于对晶圆的拿取,不会对晶圆造成损坏。
4.本实用新型的技术方案是:一种用于晶圆搬运的自动倒片机,包括工作台和连接于所述工作台的升降组件,所述升降组件设有三组且包括一号组件、二号组件和三号组件,所述一号组件、二号组件和三号组件阵列式连接于所述工作台;
5.所述工作台上连接有配合所述一号组件、二号组件或三号组件使用且用于存放晶圆的花篮;所述花篮的一侧设有连接于所述工作台的倒片装置,所述倒片装置包括壳体和连接于所述壳体的两三棱柱,两所述三棱柱转动连接于所述壳体;
6.所述一号组件包括升降台和驱动件,所述升降台连接有底座,所述底座连接于所述花篮;所述驱动件通过升降台带动所述底座运动以伸出花篮外,并带动花篮内的晶圆竖直向上运动;通过转动两所述三棱柱以将位于底座上的晶圆进行分离。
7.进一步的,所述一号组件、二号组件和三号组件的结构相同。
8.进一步的,所述工作台连接有限位块,所述限位块位于所述底座的两侧,两所述限位块相互配合使用并与所述花篮卡接连接。
9.进一步的,所述花篮内设有多个晶圆槽,所述底座的表面设有多个卡槽,所述卡槽与所述晶圆槽一一对应,以对位于花篮内的晶圆进行支撑。
10.进一步的,所述倒片装置还包括直线模组,所述直线模组与所述壳体相连接,并能够驱动所述壳体沿着所述工作台的长度方向水平移动,以将位于两三棱柱之间的晶圆进行搬运。
11.进一步的,所述三棱柱的棱边均设有一号齿和二号齿,所述一号齿和二号齿沿着所述三棱柱的长度方向交错设置,并能够与所述花篮内的晶圆一一对应。
12.进一步的,所述一号齿的宽度等于所述二号齿的宽度;所述一号齿的长度小于所述二号齿的长度。
13.进一步的,所述一号齿的宽度等于所述晶圆的厚度,所述二号齿的宽度等于所述晶圆的厚度。
14.进一步的,两所述三棱柱的平面之间的距离大于所述晶圆的直径。
15.进一步的,两所述三棱柱的棱边之间的距离小于所述晶圆的直径。
16.本实用新型的有益技术效果是:
17.1、花篮和底座相互配合使用,通过底座上的卡槽对花篮内的晶圆进行支撑,同时,底座能够沿着所述花篮的高度方向竖直向上运动并伸出花篮外,从而能够将花篮内的晶圆进行托举,便于对晶圆进行交错提取。
18.2、底座的两侧设有限位块,通过限位块保证了花篮和底座精确连接,从而使得底座上的卡槽与晶圆能够一一对应,以对晶圆进行支撑托举。
19.3、三棱柱的表面设有一号齿和二号齿,一号齿和二号齿沿着三棱柱的边交错设置,其中,晶圆与一号齿卡接时,能够对晶圆进行托举;晶圆与二号齿卡接时,晶圆与二号齿分离,无法完成托举;通过一号齿和二号齿将底座上的晶圆进行交错提取,进而增加了两晶圆之间的距离,保证下道工序时,晶圆提取更加方便。
20.4、两三棱柱侧面之间的距离大于晶圆的直径,便于将晶圆托举至两三棱柱之间,同样的,两三棱柱棱边之间的距离小于晶圆的直径,转动两三棱柱,通过三棱柱的侧边对晶圆进行托举,保证了晶圆不会脱落。
21.5、直线模组驱动壳体沿着工作台的长度方向水平移动,从而能够将分离处的晶圆放置在另一个花篮内,便于下道工序时使用。
22.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。
附图说明
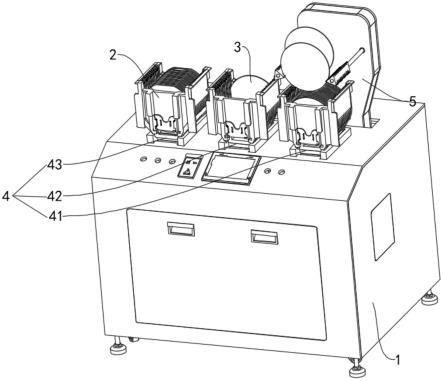
23.图1为本实用新型的整体结构示意图;
24.图2为本实用新型的升降组件和花篮连接的结构示意图;
25.图3为本实用新型的倒片装置的结构示意图;
26.图4为本实用新型的三棱柱的结构示意图。
27.附图标记为:
28.1、工作台;2、花篮;21、晶圆槽;3、晶圆;4、升降组件;41、一号组件;411、驱动件;412、升降台;413、底座;414、卡槽;42、二号组件;43、三号组件;5、倒片装置;51、壳体;52、三棱柱;521、一号齿;522、二号齿;53、直线模组;6、限位块。
具体实施方式
29.为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述,以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
30.需要说明的是,本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本技术的实施例。
31.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖
直”、“水平”、“内”、“外”等指示的方位或位置关系为基于实施例记载的以及附图所示的方位或位置关系,或者是该实用新型产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
32.如图1所示,本实用新型具体涉及一种用于晶圆搬运的自动倒片机,包括工作台1和连接于所述工作台1的升降组件4,所述升降组件4设有三组且包括一号组件41、二号组件42和三号组件43,所述一号组件41、二号组件42和三号组件43阵列式连接于所述工作台1;
33.所述工作台1上连接有配合所述一号组件41、二号组件42或三号组件43使用且用于存放晶圆3的花篮2;所述花篮2的一侧设有连接于所述工作台1的倒片装置5,所述倒片装置5包括壳体51和连接于所述壳体51的两三棱柱52,两所述三棱柱52转动连接于所述壳体51;
34.如图1和图2所示,所述一号组件41包括升降台412和驱动件411,所述升降台412连接有底座413,所述底座413连接于所述花篮2;所述驱动件411通过升降台412带动所述底座413运动以伸出花篮2外,并带动花篮2内的晶圆3竖直向上运动;通过转动两所述三棱柱52以将位于底座413上的晶圆3进行分离。
35.其中,花篮2用于存放晶圆3且花篮2与底座413相连接,同时,底座413能够于花篮2内竖直上下运动并伸出花篮2外,当驱动件411通过升降台412驱动底座413竖直向上运动时,底座413伸出花篮2外,并将花篮2内的晶圆3进行托举。此时,晶圆3位于花篮2的上方,且位于两三棱柱52之间,通过转动两三棱柱52进而将晶圆3进行托举。
36.需要说明的是,其中右侧的三棱柱52顺时针转动,左侧的三棱柱52逆时针转动,从而能够将晶圆3进行托举。
37.所述一号组件41、二号组件42和三号组件43的结构相同,通过设有多个组件从而能够将提取后的晶圆3放置在相对应的花篮2内,便于下道工序的使用。
38.如图2所示,所述工作台1连接有限位块6,所述限位块6位于所述底座413的两侧,两所述限位块6相互配合使用并与所述花篮2卡接连接,通过设置限位块6保证了花篮2能够与底座413精确连接,
39.所述花篮2内设有多个晶圆槽21,所述底座413的表面设有多个卡槽414,所述卡槽414与所述晶圆槽21一一对应,以对位于花篮2内的晶圆3进行支撑。
40.当花篮2与底座413相连接时,底座413上的卡槽414与花篮2内的晶圆槽21一一对应,同时,花篮2内的晶圆3与底座413表面的卡槽414一一对应,通过底座413对花篮2内的晶圆3进行支撑、托举。
41.如图1和图3所示,所述倒片装置5还包括直线模组53,所述直线模组53与所述壳体51相连接,并能够驱动所述壳体51沿着所述工作台1的长度方向水平移动,以将位于两三棱柱52之间的晶圆3进行搬运。
42.通过直线模组53驱动壳体51移动,从而将位于两三棱柱52之间的晶圆3进行搬运,从而保证了花篮2内的晶圆3都是错位设置的,这样有助于调节晶圆3之间的距离,进而方便下一工序时对晶圆3的拿取。
43.如图4所示,所述三棱柱52的棱边均设有一号齿521和二号齿522,所述一号齿521和二号齿522沿着所述三棱柱52的长度方向交错设置,并能够与所述花篮2内的晶圆3一一
对应。
44.需要说明的是,其中三棱柱52的棱边阵列式设置有一号齿521和二号齿522,其中一号齿521和二号齿522交错设置,同时,三棱柱52的棱边的一号齿521和二号齿522均与花篮2内的晶圆3一一对应,从而保证了当晶圆3竖直向上运动时,通过三棱柱52的一号齿521和二号齿522能够直接对晶圆3进行托举或分离。
45.所述一号齿521的宽度等于所述二号齿522的宽度;所述一号齿521的长度小于所述二号齿522的长度。
46.所述一号齿521的宽度等于所述晶圆3的厚度,所述二号齿522的宽度等于所述晶圆3的厚度。
47.需要说明的是,一号齿521的宽度与二号齿522的宽度相同,这表面了晶圆3能够在竖直状态下穿过一号齿521和二号齿522;其中一号齿521的长度小于二号齿522的长度,通过长度的设置,从而有助于对晶圆3进行筛选,保证了晶圆3错位提取,间接的调整了晶圆3之间的距离。
48.其中,一号齿521的长度可以将晶圆3进行托举;二号齿522的长度可以使得晶圆3穿过,无法托举;一号齿521和二号齿522交错设置,便于对晶圆3进行筛选。
49.当晶圆3在一号齿521时,呈现托举的状态,当晶圆3在二号齿522时,晶圆3穿过二号齿522继续放置在底座413的卡槽414上。由于一号齿521和二号齿522交错设置,如此保证了晶圆3错位提取。
50.两所述三棱柱52的平面之间的距离大于所述晶圆3的直径,便于将晶圆3放置在两三棱柱52之间。
51.两所述三棱柱52的棱边之间的距离小于所述晶圆3的直径,当三棱柱52转动时,通过设置在三棱柱52棱边的一号齿521和二号齿522对晶圆3进行托举筛选。
52.本实用新型的工作流程是:
53.1、首先,转动两三棱柱52,使得两棱柱的侧面相对应,同时将花篮2放置在两限位块6之间,并与底座413相连接。
54.2、此时,花篮2内的晶圆槽21与底座413的卡槽414一一对应,同样的花篮2内的晶圆3与底座413的卡槽414一一对应,并通过底座413的卡槽414对花篮2内的晶圆3进行支撑。
55.3、驱动件411驱动升降台412运动,并带动底座413竖直向上运动,底座413伸出花篮2外,并对花篮2内的晶圆3进行托举,使得晶圆3位于两三棱柱52之间。
56.4、转动两三棱柱52,使得两三棱柱52的棱边相对应,此时,位于三棱柱52棱边的一号齿521和二号齿522均与晶圆3一一对应。
57.5、驱动件411驱动升降台412运动,并带动底座413竖直向下运动,此时,位于底座413上的晶圆3的两端分别与三棱柱52的一号齿521和二号齿522相抵靠。
58.6、此时,一号齿521对晶圆3进行托举,晶圆3穿过二号齿522继续跟随底座413同步运动。从而完成了对晶圆3的错位提取。
59.7、直线模组53驱动壳体51沿着工作台1的长度方向运动,并将位于两三棱柱52之间的晶圆3进行搬运。
60.以上实施例,仅为本实用新型的具体实施方式,用以说明本实用新型的技术方案,而非对其限制,本实用新型的保护范围并不局限于此,尽管参照前述实施例对本实用新型
进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本实用新型实施例技术方案的精神和范围,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1