衣物处理机和用于操作衣物处理机的方法与流程
衣物处理机和用于操作衣物处理机的方法
1.本发明涉及衣物处理机领域,诸如以下描述仅通过举例方式所谈及的洗衣机。更具体地,本发明涉及衣物处理机,这种衣物处理机设置有用于使衣物滚筒旋转的永磁马达或感应马达、以及被配置成操作所述电动马达的基于逆变器的设备。
背景技术:
2.众所周知,当今,驱动马达的逆变器被广泛应用于家用电器。通常,驱动马达的逆变器包括输入级和逆变桥,该逆变桥进而设置有多个开关单元,该多个开关单元被控制以便生成和调制要馈送到马达端子的ac电压。输入级通常包括二极管桥,该二极管桥具有耦合到干线以接收ac干线电压的输入端、用于提供dc电压的输出端以及用于消除在经整流电压中出现的电压纹波的电解电容器。
3.取决于功率大小,通常将用于家用电器的逆变器配置成具有高电容,以将纹波电压以及因此纹波电流保持在合理水平内、通常使其包括在10%到15%之间。实际上,如果纹波电压/电流增大,电解电容器就会使预期寿命降低,于是为了实现对马达的无缝驱动,推荐较小的纹波电压。然而,虽然一方面电容器两端的平坦且稳定的dc电压(即低纹波电压)改善了马达驱动算法的性能,但另一方面其会通过谐波影响干线电流。
4.为了解决这种问题,用于衣物处理机的逆变器通常设置有(有源或无源的)功率因数校正器单元,该功率因数校正器单元包括具有足够的电感以使功率因数(因此谐波)增加到期望值的电感器。
5.然而,功率因数校正器单元的缺点是其是昂贵且笨重的部件。
6.本发明的目的是解决上述缺陷。
7.本发明实现了上述目的,本发明涉及一种衣物处理机,该衣物处理机包括:外壳、安装在所述外壳内部以围绕旋转轴线旋转的衣物滚筒、被设计成使所述衣物滚筒围绕所述旋转轴线旋转的电动马达、基于逆变器的设备,该基于逆变器的设备被配置成控制所述电动马达并且包括:输入级,该输入级连接到干线线路以接收ac线路电流和ac干线电压并且被配置成将所述交流干线电压ac转换为经整流dc电压;无电解电容器的逆变器,该无电解电容器的逆变器被配置成基于开关信号的占空比来生成要馈送到所述电动马达的输出电流;dc链路,该dc链路将所述无电解电容器的逆变器连接到所述输入级并且被来自或去往所述无电解电容器的逆变器的dc链路电流穿过;dc链路电容器,该dc链路电容器连接到所述dc链路;调节器系统,该调节器系统被配置成基于指示所述电动马达的受控参数的至少已确定/已估计马达值、以及至少马达基准值来控制开关信号的占空比,该马达基准值与所述电动马达的所述受控参数相关联;该基于逆变器的设备进一步包括有源电压限制器单元,该有源电压限制器单元被配置成调节所述马达基准值以便将该dc链路电容器电压限制在预定电压范围内。
8.优选地,所述已确定/已估计马达值对应于所述输出电流,所述马达基准值对应于所述电流基准,所述衣物处理机包括:电压传感器装置,该电压传感器装置被配置成确定所述dc链路电容器电压的大小;电流传感器装置,该电流传感器装置被配置成确定通过所述
无电解电容器的逆变器提供给所述电动马达的输出电流的大小,所述调节器系统被配置成基于所述输出电流和所述电流基准来控制所述无电解电容器的逆变器的开关单元的所述占空比;所述有源电压限制器单元被配置成调节所述调节器系统的所述电流基准以便使所述dc链路电容器电压被限制在所述预定电压范围内。
9.优选地,所述有源电压限制器单元进一步被配置成调节所述调节器系统的所述电流基准,以便使所述dc链路电容器电压被限制在所述预定电压范围内,而无需使用所述线路电流和/或dc链路电流。
10.优选地,所述有源电压限制器单元进一步被配置成在所述电动马达经由所述无电解电容器的逆变器再生到所述dc链路电容器的反向电流时,将所述dc链路电容器电压钳位到预定值。
11.优选地,所述有源电压限制器单元进一步被配置成:基于所述输出电流和所述占空比来确定有功电流;基于所述有功电流和所述dc链路电容器电压来调节所述电流基准。
12.优选地,所述有源电压限制器单元进一步被配置成基于指示这些开关信号的所述占空比的d-q轴向占空比和指示所述输出电流的d-q轴向电流来确定第一有功电流
13.优选地,所述有源电压限制器单元被配置成基于指示这些开关信号的所述占空比的d-q轴向占空比以及所述确定的电流基准来确定第二有功电流。
14.优选地,所述有源电压限制器单元进一步被配置成通过计算所述第一有功电流与所述第二有功电流之间的最小电流来确定所述有功电流。
15.优选地,所述有源电压限制器单元进一步被配置成基于所述第二有功电流和所述d-q轴向占空比来确定两个最大绝对校正信号。
16.优选地,所述有源电压限制器单元进一步被配置成基于所测量电压电平和指示用于再生的最大绝对有功电流的参数来确定瞬时最大允许再生电流。
17.优选地,所述有源电压限制器单元进一步被配置成基于以下方程来确定瞬时最大允许再生电流
[0018][0019]
其中,其中ω
v
(t)是取决于以下各项的权重系数:所述dc链路电容器电压vdc(t)、标称dc链路电压(vdcnom)以及预定高压极限(vhigh)。
[0020]
优选地,所述有源电压限制器单元进一步被配置成根据以下经验饱和三次方程来确定要施加的负校正分数:
[0021][0022]
优选地,所述有源电压限制器单元进一步被配置成通过以下方程将不受约束的轴向校正确定为最大校正的分数:
[0023][0024][0025]
优选地,所述有源电压限制器单元进一步被配置成通过应用以下饱和度方程和校
正方程来确定受约束的轴向电流校正
[0026][0027][0028]
其中:
[0029]
kqd是正调谐增益,该正调谐增益可以用于在饱和发生时将最初针对q轴计算的校正转移到d轴部分,
[0030]
idunc和iqunc是所述轴向电流校正。
[0031]
优选地,所述有源电压限制器单元被配置成根据以下方程来修改所述电流基准:
[0032][0033][0034]
优选地,所述已确定/已估计马达值对应于所述电动马达的估计扭矩,并且所述马达基准值对应于扭矩基准,所述调节器系统被配置成接收所述估计扭矩和所述扭矩基准并且基于所述估计扭矩和所述扭矩基准来控制所述无电解电容器的逆变器的开关单元,所述有源电压限制器单元被配置成调节所述调节器系统的所述扭矩基准,以便使所述dc链路电容器电压被限制在所述预定电压范围内。
[0035]
优选地,所述有源电压限制器单元被配置成调节所述调节器系统的所述扭矩基准,以便使所述dc链路电容器电压被限制在所述预定电压范围内,而无需使用所述线路电流和/或dc链路电流。
[0036]
优选地,所述有源电压限制器单元被配置成:接收指示所述开关信号的占空比的第一电压信号;接收指示被提供给所述电动马达的所述输出电流的第一电流信号;接收该dc链路电容器的所述电压;基于所述第一电压信号、所述第一电流信号和该dc链路电容器的所述电压来确定扭矩极限值。
[0037]
优选地,所述有源电压限制器单元被配置成:基于所述第一电压信号和所述第一电流信号来确定有功电流;基于所测量电压电平和与最大绝对有功电流或再生相对应的预定参数,通过以下方程来确定瞬时最大允许再生电流:iaistabs(t)=ωv*iamaxabs,
[0038]
其中,ωv是取决于电压vdc(t)和标称dc链路电压vdcnom以及高压极限vhigh的权重系数;
[0039]
计算指示所述有功电流与所述最大允许再生电流之差的电流值,对所述电流值执行比例积分函数以计算所述扭矩极限。
[0040]
优选地,所述基于逆变器的设备进一步包括比较器装置,该比较器装置被配置成:在输入端处接收马达速度;在输入端处接收所述扭矩极限;接收扭矩目标,该扭矩目标指示向所述电动马达请求的扭矩;将所述扭矩目标与所述扭矩极限进行比较;在所述马达速度为正时并且所述扭矩目标小于或等于所述扭矩极限时,将该扭矩基准设置为该扭矩极限。
[0041]
优选地,所述比较器装置进一步被配置成:当该马达速度ω为负并且该扭矩目标大于或等于该扭矩极限时,将该扭矩基准设置为该扭矩极限。
[0042]
本发明进一步涉及一种用于控制衣物处理机的方法,该衣物处理机包括:外壳、安
装在所述外壳内部以围绕旋转轴线旋转的衣物滚筒、被设计成使所述衣物滚筒围绕所述旋转轴线旋转的电动马达、基于逆变器的设备,该基于逆变器的设备被配置成控制所述电动马达并且包括:输入级,该输入级连接到干线线路以接收ac线路电流和ac干线电压并且被配置成将所述交流干线电压ac转换为经整流dc电压;无电解电容器的逆变器,该无电解电容器的逆变器被配置成基于开关信号的占空比来生成要馈送到所述电动马达的输出电流;dc链路,该dc链路将所述无电解电容器的逆变器连接到所述输入级并且被来自或去往所述无电解电容器的逆变器的dc链路电流穿过;dc链路电容器,该dc链路电容器连接到所述dc链路;调节器系统,该调节器系统被配置成基于指示所述电动马达的受控参数的至少已确定/已估计马达值、以及至少马达基准值来控制开关信号的占空比,该马达基准值与所述电动马达的所述受控参数相关联;该方法进一步包括调节所述马达基准值以便将该dc链路电容器电压限制在预定电压范围内的步骤。
[0043]
优选地,优选地,所述已确定/已估计马达值对应于所述输出电流,所述马达基准值对应于所述电流基准,所述方法包括:确定所述dc链路电容器电压的大小;确定通过所述无电解电容器的逆变器提供给所述电动马达的输出电流的大小,所述调节器系统被配置成基于所述输出电流和所述电流基准来控制所述无电解电容器的逆变器的开关单元的所述占空比,所述方法调节所述调节器系统的所述电流基准以便使所述dc链路电容器电压被限制在所述预定电压范围内。
[0044]
优选地,该方法包括以下步骤:调节所述调节器系统的所述电流基准,以便使所述dc链路电容器电压被限制在所述预定电压范围内,而无需使用所述线路电流和/或dc链路电流。
[0045]
优选地,该方法包括以下步骤:在所述电动马达经由所述无电解电容器的逆变器再生到所述dc链路电容器的反向电流时将所述dc链路电容器电压钳位到预定值。
[0046]
优选地,该方法包括:基于所述输出电流和所述占空比来确定有功电流;基于所述有功电流和所述dc链路电容器电压来调节所述电流基准。
[0047]
优选地,该方法包括以下步骤:基于指示这些开关信号的所述占空比的d-q轴向占空比和指示所述输出电流的d-q轴向电流来确定第一有功电流。
[0048]
优选地,该方法包括以下步骤:基于指示这些开关信号的所述占空比的d-q轴向占空比以及所述确定的电流基准来确定第二有功电流。
[0049]
优选地,该方法包括以下步骤:通过计算所述第一有功电流与所述第二有功电流之间的最小电流来确定所述有功电流。
[0050]
优选地,该方法包括以下步骤:基于所述第二有功电流和所述d-q轴向占空比来确定两个最大绝对校正信号。
[0051]
优选地,该方法包括以下步骤:基于所测量电压电平和指示用于再生的最大绝对有功电流的参数来确定瞬时最大允许再生电流。
[0052]
优选地,该方法包括以下步骤:基于以下方程来确定瞬时最大允许再生电流
[0053][0054]
其中,其中ω
v
(t)是取决于以下各项的权重系数:所述dc链路电容器电压vdc(t)、标称dc链路电压(vdcnom)以及预定高压极限(vhigh)。
[0055]
优选地,该方法包括根据以下经验饱和三次方程来确定要施加的负校正分数的步
骤:
[0056][0057]
优选地,该方法包括通过以下方程将不受约束的轴向校正确定为最大校正的分数的步骤:
[0058][0059][0060]
优选地,该方法包括通过应用以下饱和度方程和校正方程来确定受约束的轴向电流校正的步骤
[0061][0062][0063]
其中:
[0064]
kqd是正调谐增益,该正调谐增益可以用于在饱和发生时将最初针对q轴计算的校正转移到d轴部分,
[0065]
idunc和iqunc是所述轴向电流校正。
[0066]
优选地,该方法包括根据以下方程来修改所述电流基准的步骤:
[0067][0068][0069]
优选地,该方法包括以下步骤:所述已确定/已估计马达值对应于所述电动马达的估计扭矩;所述马达基准值对应于扭矩基准;所述调节器系统被配置成接收所述估计扭矩和所述扭矩基准并且基于所述估计扭矩和所述扭矩基准来控制所述无电解电容器的逆变器的开关单元,所述方法包括调节所述调节器系统的所述扭矩基准以便使所述dc链路电容器电压被限制在所述预定电压范围内的步骤。
[0070]
优选地,该方法包括以下步骤:调节所述调节器系统的所述扭矩基准,以便使所述dc链路电容器电压被限制在所述预定电压范围内,而无需使用所述线路电流和/或dc链路电流。
[0071]
优选地,该方法包括以下步骤:接收指示所述开关信号的占空比的第一电压信号;接收指示被提供给所述电动马达的所述输出电流的第一电流信号;接收该dc链路电容器的所述电压;基于所述第一电压信号、所述第一电流信号和该dc链路电容器的所述电压来确定扭矩极限值。
[0072]
优选地,该方法包括:基于所述第一电压信号和所述第一电流信号来确定有功电流;基于所测量电压电平和与用于再生的最大绝对有功电流相对应的预定参数,通过以下方程来确定瞬时最大允许再生电流(ia(t)):iaistabs(t)=ωv*iamaxabs,
[0073]
其中,ωv是取决于电压vdc(t)和标称dc链路电压vdcnom以及高压极限vhigh的权
重系数;计算指示所述有功电流与所述最大允许再生电流之差的电流值;对所述电流值执行比例积分函数以计算所述扭矩极限。
[0074]
优选地,该方法包括:将所述扭矩目标与所述扭矩极限进行比较;当所述马达速度为正并且所述扭矩目标小于或等于所述扭矩极限时,将该扭矩基准设置为该扭矩极限。
[0075]
优选地,该方法包括以下步骤:当该马达速度为负并且该扭矩目标大于或等于该扭矩极限时,将该扭矩基准设置为该扭矩极限。
[0076]
现在将参照附图以举例方式来描述本发明的非限制性实施例,在附图中:
[0077]
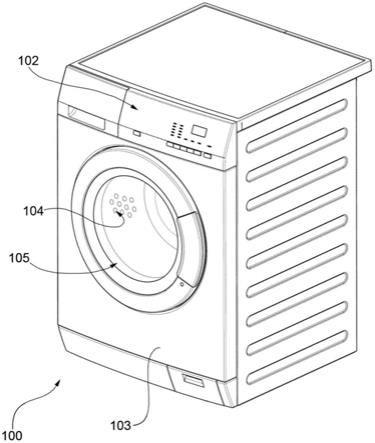
图1示出了根据本披露内容的第一实施例的衣物处理机的透视图,
[0078]
图2示出了根据本披露内容的设置有基于逆变器的设备的衣物处理机的示意图,
[0079]
图3是根据本披露内容的第一实施例提供的基于逆变器的设备的框图,
[0080]
图4是由图3所展示的基于逆变器的设备的有源电压限制器单元实施的操作的流程图,
[0081]
图5是根据本披露内容的第二实施例提供的基于逆变器的设备的框图,
[0082]
图6是由图5所展示的基于逆变器的设备的有源电压限制器单元实施的操作的流程图。
[0083]
在本说明书和附图中列举的实施例中所示的配置仅是本披露内容的示例性实施例,并且应当理解,在对本申请进行归档时,存在能够代替本说明书的实施例和附图的各种修改示例。
[0084]
本发明已证明在应用于衣物处理机(诸如洗衣机)时特别有利,如下所述。应当理解的是,虽然本发明是参照洗衣机进行描述的,但是考虑了其他应用。如可以理解的,本发明可以方便地应用于其他衣物处理机,如例如洗衣机和衣物烘干机(也称为洗涤机/烘干机)。
[0085]
参照图1和图2,附图标记100整体地指示家用衣物处理机,该家用衣物处理机被配置成执行可由用户经由控制面板102从多个固定的衣物处理洗涤程序中选择的衣物处理洗涤程序。
[0086]
家用衣物处理机1包括:(优选地但不是必须地)基本上平行六面体形的刚性外盒状外壳103,该外壳被结构化成搁置在地板上;优选地基本上圆柱形、钟形的中空洗涤桶101(图2),该洗涤桶布置在盒状外壳103内部,其中其开口或口部直接面向在盒状外壳103的前壁中实现的衣物装载/卸载贯通开口。
[0087]
家用衣物处理机1进一步包括:优选地基本上圆柱形的、可弹性地变形的波纹管(未示出),该波纹管将洗涤桶101的前开口或口部水密性地连接到在盒状外壳103的前壁中所实现的衣物装载/卸载开口;以及基本上圆柱形的钟形穿孔式回转滚筒104,该回转滚筒被结构化成容纳要洗涤的衣物。该回转滚筒104以轴向旋转方式被容纳在洗涤桶内,以便能够围绕其纵向基准轴线(优选地但不是必须地为水平旋转轴线)自由旋转。在未示出的替代性实施例中,旋转轴线可以是竖直的或倾斜的。
[0088]
根据优选实施例,回转滚筒104以轴向旋转方式被容纳在洗涤桶101内,其中其前开口直接面向/对齐到外壳103的前壁上的衣物装载/卸载开口,并且该滚筒旋转轴线优选地被布置成与洗涤桶101的基本上水平定向的纵向基准轴线局部地基本上重合。
[0089]
此外,中空洗涤桶101可以优选地经由悬挂系统以浮动方式悬挂在外壳103内,该
悬挂系统优选但并不是必须地包括将洗涤桶的上部部分连接到盒状外壳103的顶部上的一对上部螺旋弹簧(未示出)、以及将洗涤桶的底部部分连接到盒状外壳103的底部上的一对下部减震器(未示出)。
[0090]
参照图1和图2,衣物处理机100还包括舷窗门105,该舷窗门铰接至外壳103的前壁上,以便围绕(优选地但不是必须地)竖直定向的基准轴线旋转到关闭位置以及从该关闭位置旋转,在该关闭位置处,舷窗门105的外围边界完全搁置在前壁上,以便关闭该衣物装载/卸载开口并且水密性地密封洗涤桶101。
[0091]
衣物处理机100还包括电力驱动的马达组件,该电力驱动的马达组件进而包括电动马达2(在图2中示意性地展示),该电动马达被结构化成驱动回转滚筒104在洗涤桶101内部围绕其纵向基准轴线进行旋转。理解的是,电动马达2可以直接与回转滚筒104的轴相关联,或者可以通过皮带/皮带轮系统或类似的机械装置(未示出)机械地联接到回转滚筒。
[0092]
优选地,电动马达2是三相马达,但不限于此。换句话说,应当理解的是,本发明不限于三相马达2,而是可以是任何类型的多相马达(诸如双相马达或多相马达)或类似马达。优选地,电动马达2可以是永磁马达或感应马达或任何其他类似的马达。
[0093]
参照图2和图3,衣物处理机1还包括基于逆变器的设备1,该基于逆变器的设备被配置成根据下文所披露的控制方法来控制电动马达2。
[0094]
根据本发明的第一实施例,该基于逆变器的设备1在图3中被示意性地展示并且包括输入级4、逆变器5和马达控制器级6。
[0095]
根据图3所展示的第一实施例,输入级4包括整流器单元,该整流器单元被配置成将在输入端处从电源系统8接收到的交流电压ac转换为要在输入端处提供给逆变器5的经整流dc电压。输入级4可以包括例如全桥二极管整流器,该全桥二极管整流器具有耦合到电源系统8的ac干线线路以接收ac干线线路电流和ac干线电压的输入端、以及连接到逆变器5的输出端。理解的是,电源系统8和输入级4两者均取决于要控制的逆变器和马达的类型。例如,电源系统8和输入级4可以是三相的或多相的或类似的。
[0096]
根据图3所展示的第一实施例,逆变器5被配置成将dc电压转换为ac电压。逆变器5可以设置有多个开关单元(未展示),该多个开关单元由马达控制器级6控制,以便生成和调制要馈送到马达2的ac电压。在示例性实施例中,逆变器5包括连接到输入级4的输出端以接收dc电压的输入端以及连接到电动马达2的输出端。
[0097]
根据优选实施例,输入级4的整流器单元包括单相整流电路系统,而逆变器5包括三相逆变器,该三相逆变器具有连接到整流器单元的相应输出端的两个输入端以及连接到电动马达2的相应端子的三个输出端。
[0098]
参照图3,基于逆变器的设备1进一步包括dc链路10,该dc链路进而包括将输入级4的输出端与逆变器5的输入端连接的两条dc链路线路。基于逆变器的设备1进一步包括电容器11、电流传感器12和电压传感器13。
[0099]
dc链路电容器11连接在dc链路10的两条dc链路线路之间,即,连接在输入级4的输出端子之间。方便地,dc链路电容器11可以具有包括在大约1μf到大约20μf之间的电容。申请人已经发现,使用具有低电容的dc链路电容器11具有使纹波电压增加高达100%的技术效果,从而在干线电流中具有非常好的谐波含量,这允许省去功率因数校正器单元。
[0100]
换句话说,使用具有低电容的dc链路电容器11的优点是,由于dc链路电容器11的
电容较小,经整流电流仍然具有相当大的谐波含量,因此可以去除专门被设计用于校正谐波的任何昂贵且笨重的功率因数校正器电路(诸如串联地耦合在干线输出端与二极管桥输入端之间的电感器)。优选地,dc链路电容器11可以包括薄膜型电容器。与电解电容器相比,薄膜型电容器方便、更便宜且更耐用。由于逆变器5不包括电解电容器,因此该逆变器对应于“无电解电容器的逆变器”。
[0101]
电流传感器12可以被配置成感测逆变器5施加到电动马达2的输出电流。参照图3所展示的示例性实施例,电流传感器12可以包括一个或多个传感器,该一个或多个传感器被配置成感测被提供给三相马达2的电流,即,相电流iu(t)、iv(t)、iw(t)。理解的是,为了清楚起见,附图中未展示电流iu(t)、iv(t)、iw(t)的时间依赖性。
[0102]
电压传感器13优选地被配置成感测dc链路电容器11的电压vdc(t)。
[0103]
参照图3,马达控制器级6可以包括电流调节器系统14和有源电压限制器单元15。
[0104]
电流调节器系统14被配置成:从电流传感器12接收关于所感测的电流iu(t)、iv(t)、iw(t)的信息;从电压传感器13接收关于所感测的电压vdc(t)的信息;接收关于马达控制参数(即,由机器100的电子控制单元110提供的所请求的马达速度spdref)的信息;并生成三个信号uu(t)、uv(t)、uw(t)以控制逆变器5的开关单元(未展示)。
[0105]
信号uu(t)、uv(t)、uw(t)可以指示被提供给逆变器5的开关单元的命令信号的占空比。信号uu(t)、uv(t)、uw(t)也可以是指示要施加到马达的每一相的dc链路电压的分数的每单位信号。这三个信号uu(t)、uv(t)、uw(t)可以是脉冲宽度调制信号(pwm)。
[0106]
根据图3所示的实施例,电流调节器系统14可以包括:减法器级20、速度控制级21、通量减弱级22、电流调节器级23、park逆变换级24、clarke逆转换级25、clarke直接转换级26、park直接变换级27、以及无传感器的速度/通量位置观察器级28。
[0107]
clarke直接转换级26被配置成将三相感测电流iu(t)、iv(t)、iw(t)转换为两相α,βpark坐标系(静止参考坐标系),并且向park直接变换级27和无传感器的速度/通量位置观察器级28提供电流值iα(t)和iβ(t)。
[0108]
无传感器的速度/通量位置观察器级28被配置成接收两个电流值iα(t)和iβ(t)以及两个信号uα(t)和uβ(t)。信号uα(t)和uβ(t)指示两相α,βpark坐标系中的两个占空比值。
[0109]
无传感器的速度/通量位置观察器级28进一步被配置成基于这两个电流值iα(t)和iβ(t)以及信号uα(t)和uβ(t)来提供与转子的实际速度相关的转子速度信号spd_反馈。无传感器的速度/通量位置观察器级28进一步被配置成基于这两个电流值iα(t)和iβ(t)来提供指示所估计的转子角度的角度θ
估计
。在示例性实施例中,无传感器的速度/通量位置观察器级28可以包括转子角位置估计器和转子角速度估计器。转子角位置估计器可以被配置成在不使用位置传感器的情况下基于这两个电流值iα(t)和iβ(t)来确定转子的角位置θ
估计
,而转子角速度估计器可以被配置成基于角位置θ
估计
来确定转子速度spd_反馈。
[0110]
park变换级27被配置成:接收两相α,βpark坐标系(静止参考坐标系)中的角度θ
估计
和所测得的电流值iα和iβ,并且将电流值iα(t)和iβ(t)转换为两相d-q坐标系(旋转同步参考坐标系),从而基于角度θ
估计
生成所测得的同步电流id(t)和iq(t)。
[0111]
在示例性实施例中,减法器级20被配置成在输入端处接收马达速度信号spd_ref和马达速度spc_反馈。马达速度信号speed-ref涉及与指示所请求的马达速度的命令信号相关联的基准马达速度,而马达速度信号spd_feedback涉及由无传感器的速度/通量位置
观察器级28提供的经确定的马达速度。减法器级20被配置成基于输入马达速度信号spd_ref与spd_feedback之差来确定速度误差。
[0112]
速度控制级21被配置成接收速度误差并提供电流iqref。例如,速度控制级21可以包括pi控制器,并且被配置成在两相d-q坐标系中进行操作。电流iqref指示d-q坐标系的q轴上的转子基准电流。通常,信号spd_ref和spd_反馈、iqref和idref可以是时变信号,其显式时间依赖性未在标记中展示以提高描述的清楚性。
[0113]
通量减弱级22被配置成:在两相d-q坐标系中进行操作并且生成基准电流idref,该基准电流指示d-q坐标系的d轴上的转子基准电流。
[0114]
有源电压限制器单元15被配置成调节供应到电流调节器系统23的电流基准,以便将dc链路电容器电压vdc(t)限制在预定电压范围内。
[0115]
优选地,有源电压限制器单元15被配置成基于dc链路电容器电压vdc(t)以及所测得的电流值id(t)和iq(t)来调节id-iq电流调节器的电流基准。
[0116]
便利地,有源电压限制器单元15被配置成调节id-iq电流调节器的电流基准,而无需使用dc链路的任何电流测量结果。换句话说,基于逆变器的设备1在dc链路10上不包括任何电流传感器。
[0117]
优选地,有源电压限制器单元15被配置成在输入端接收:电流基准iqref、电流基准idref、dc链路电容器11的电压vdc(t)、指示(下文详细披露的)d-q坐标系中的占空比的两个信号uq(t)和ud(t)、以及在d-q坐标系中所测得的电流值id(t)和iq(t)。有源电压限制器单元15进一步被配置成通过实施下文详细披露的控制方法来确定两个受约束的轴向电流校正iqcorr(t)和idcorr(t)。
[0118]
参照图3,电流调节器系统14进一步包括加法器单元30、加法器单元31、减法单元32和减法单元33。
[0119]
加法器单元30被配置成:接收电流基准iqref和q轴向电流校正iqcorr(t),并且基于电流基准iqref和电流校正iqcorr(t)的相加,在输出端处提供经修改的电流基准iqcorr(t)。
[0120]
加法器单元31被配置成:接收电流基准idref和d轴向电流校正idcorr(t),并且基于电流基准idref和电流校正idcorr(t)的相加,在输出端处提供经修改的电流基准idrefmod(t)。
[0121]
减法单元32被配置成接收经修改的电流基准iqrefmod(t)和所测得的电流iq(t),并且在输出端处提供经修改的电流基准iqrefmod(t)与电流iq(t)之间的电流差δiq(t)。
[0122]
减法单元33被配置成接收经修改的电流基准idrefmod(t)和所测得的电流id(t),并且在输出端处提供经修改的基准电流idrefmod与电流id之间的电流差δid(t)。
[0123]
电流调节器级23被配置成在输入端处接收电流差δiq(t)和电流差δid(t),并且基于δiq(t)和δid(t)在输出端处分别提供信号uq(t)和ud(t)。信号uq(t)和ud(t)指示q-d坐标系中的占空比。信号uq(t)和ud(t)还可以指示要沿同步d-q参考坐标系的每个轴施加的最大电压的分数。
[0124]
park逆变换级24被配置成在输入端处接收信号uq(t)和ud(t),并且产生指示两相α,βpark坐标系中的占空比值的信号uα(t)和uβ(t)。信号uα(t)和uβ(t)还可以指示要沿静止α-β参考坐标系的每个轴施加的最大电压的分数。
[0125]
clarke逆转换级25被配置成在输入端处接收信号uα(t)和uβ(t),并且将开关信号uu(t)、uv(t)、uw(t)提供给逆变器单元5。
[0126]
图4是可以由(图3所示的)有源电压限制器单元15实施的示例性控制方法的流程图。
[0127]
在示例性实施例中,有源电压限制器单元15被配置成实施控制方法以控制电流调节器系统14,从而在再生模式期间将dc链路电容器11的电压vdc(t)限制在预定电压范围内。
[0128]
在这方面,由有源电压限制器单元15实施的控制方法使用控制参数/信号(在下文中被指示为估计的“有功电流ia(t)”(其是根据对逆变器可用的且马达相电流以及命令的占空比信号所估计的))和dc链路电容器11的电压vdc(t)来确定要用于修改电流调节器系统14控制电动马达2所使用的电流基准iqref和idref的电流校正值iqcorr(t)和idcorr(t)。
[0129]
由有源电压限制器单元15执行的控制方法控制dc链路电容器11的电压vdc(t),以便在例如电动马达2趋向于再生到dc链路电容器10的反向电流(ip(t)变为负)的情况下(即,在马达制动期间)将电压vdc(t)“钳位”到恒定值。可以通过计算所述有功电流ia(t)来检测dc链路电流为负——ip(t)<0——的情况,所述有功电流取代不可用电流ip(t)。因此,该方法控制iqrefmod和idrefmod,以便限制有功电流ia(t)为负,直到必要时使其为零(以完全消除到电容器的任何反向电流)。
[0130]
在下文中将披露控制方法所使用的有功电流ia(t)的意义。申请人进行的测试证明,dc链路电容器11的动态根据以下方程演进:
[0131]
d/dx vdc(t)=(ir(t)-ip(t))/cdc
[0132]
当输入级4是无源不受控整流器时,则电流ir(t)>0(从整流器流向dc链路电容器的电流)是不可控制的(并且以干线频率的两倍进行波动),并且对于dc链路电容器11的较小电容,当ir(t)偶然接近零时,即使较小的负ip(t)(在制动操作中出现的再生电流)也可能导致较大的电压过冲。这种情况可能会损坏马达控制器级6的电子部件,其可能由于过电压而发生故障。
[0133]
在这方面,控制方法使用通过将相电流的测量结果与占空比命令相结合而获得的有功电流ia(t)来检测再生(即,反向电流的出现)。实际上,有功电流ia(t)可以通过代数形式表示为对应于电流ip(t)的缩放版本,也就是说,可以使用有功电流ia(t)代替电流ip(t)来检测再生并且然后采取措施以限制电容器电压vdc(t)。
[0134]
更具体地,为了提高清楚性并促进对本发明的理解、但这并不意味着任何一般性的损失,下文将描述通过根据本发明的方法控制的有功电流ia(t)如何与电流ip(t)相关。
[0135]
瞬时有功功率p(t)(即(在p(t)>0的情况下)从dc链路吸收的功率或者(在p(t)<0的情况下)被反向供应到dc链路的功率)可以用dc链路参量来表达:
[0136]
方程(1)p(t)=v
dc
(t)i
p
(t)
[0137]
瞬时电流ip(t)((在ip(t)>0的情况下)从dc链路电容器11吸收或(在ip(t)<0的情况下)被反向供应/再生到该dc链路电容器的瞬时电流)可以通过对方程(1)求逆来计算:
[0138]
方程(2)
[0139]
有功功率p(t)还可以用马达2的相电流和相电压(被称为马达的中性点)的标量积来表达:
[0140]
方程(3)p(t)=v
u
(t)i
u
(t)+v
v
(t)i
v
(t)+v
w
(t)i
w
(t)
[0141]
其中,通过使用dq0-park变换:
[0142]
方程(4)
[0143]
有功功率可以根据以下方程用d-q坐标系的电流和电压来表达
[0144][0145][0146]
方程(5)
[0147]
忽略零序电流和电压(v0,i0),考虑有功功率的以下简化形式:
[0148]
方程(6)
[0149]
考虑到电压vd(t)和vq(t)是通过标准空间矢量调制切换策略施加的,这些电压通过以下方程与占空比ud(t)和uq(t)[pu]相关
[0150]
方程(7)
[0151]
则其得出:
[0152]
方程(8)
[0153]
通过定义有功电流ia(t):
[0154]
方程(9)i
a
(t):=u
d
(t)i
d
(t)+u
q
(t)i
q
(t),
[0155]
可以通过同步坐标系电流和信号ud(t)和uq(t)来计算该信号。此外,以下线性关系成立:
[0156]
方程(10)
[0157]
因此,申请人已经发现,根据方程(10),控制有功电流ia(t)相当于控制ip(t)。特别地,使ia(t)归零对应于使ip(t)等于零。
[0158]
如果检测到有损再生(负ia(t)或电容器电压vdc(t)增大),则作为第一条规定,可以通过使ia(t)等于零来阻止再生电流。
[0159]
除了ia(t)之外,还可以使用另一合成信号(称为iaref(t)),该合成信号在电流调节器已经稳定之后给出关于有功电流ia(t)的值将为多少的预期(预测)。实际上,在具有电流调节器(针对id(t)和iq(t))的马达驱动器中,命令电流达到规定值idref和iqref,并且调节器负责通过计算合适的占空比来获得所需电流,以便由逆变器单元驱使。
[0160]
规定的一对基准电流被定义为在时间t处的基准有功电流,该信号是使用时间t处的基准电流和占空比来计算的:
[0161]
方程(11)
[0162]
对于(进而在速度/扭矩控制器或通量/减弱或磁化块的命令下)基准电流的变化,信号iaref(t)给出关于在过渡之后有功电流将为多少的粗略预测,因为电流调节器将朝向基准来驱动电流。
[0163]
图4的流程图包含这样的操作:这些操作由有源电压限制器单元15执行以修改电流调节器系统14的电流基准,从而在例如因制动或负载扭矩的外部突然降低而引起的再生模式期间限制dc链路电容器11的电压vdc(t)。
[0164]
首先,控制方法执行(使用park变换矩阵的轴d和q)基于以下各项来确定瞬时有功电流ia(t)和iaref(t)的步骤(框100):占空比ud(t)、uq(t);可用电流id(t)、iq(t);以及电流基准idref、iqref。
[0165]
优选地,该控制方法通过以下公式来确定瞬时有功电流ia(t)和iaref(t):
[0166]
i
α
(t)=u
d
(t)i
d
(t)+u
d
(t)i
q
(t)
[0167]
方程(12a)
[0168]
理解的是,可替代地,可以采取不同于同步坐标系的参考坐标系中的电流和占空比(例如,使用同步参考坐标系α-β中表达的参量(如果可用的话))来计算有功电流。
[0169]
i
α
(t)=u
α
(t)i
α
(t)+u
β
(t)i
β
(t)
[0170]
方程(12b)
[0171]
此外,该控制方法执行通过计算由方程(12)确定的有功电流ia(t)与iaref(t)之间的最小值来确定最坏情况的有功电流iaws(t)的步骤(框110):
[0172]
方程(13)
[0173]
该方法进一步执行使用由方程(12a)计算出的值iaref(t)来确定两个最大绝对校正信号idmax(t)和iqmax(t)的步骤(框120):
[0174]
方程(14)
[0175]
申请人已经发现,最大绝对校正信号idmax(t)和iqmax(t)表示最大绝对校正,这些最大绝对校正在有功电流iaref(t)从相应的电流id和iq中完全减去时使该有功电流
iaref归零。在这方面,通过修改计算出的经修改有功电流得出:
[0176][0177]
申请人已经发现,使有功电流ia(t)等于零对应于使电流的任何再生完全停止。申请人已经发现,为了避免过电压,没必要施加最大校正。取决于电压电平和某些用户定义的调谐参数,可以方便地仅施加idmax(t)和iqmax(t)的分数。实际上,取决于电压电平、有功电流ia(t)也可以取具有下限——iaistabs(t)的较小负值(即进行再生),其中,iaistabs(t)是在下一步骤计算的绝对值。
[0178]
此外,该方法执行以下步骤:基于所测量电压电平和与例如由用户定义的用于再生的最大绝对有功电流相对应的预定参数iamaxabs来确定瞬时最大允许再生电流iaistabs(t)(方框130):
[0179]
方程(15)
[0180]
其中,ωv(t)是取决于电压vdc(t)和标称dc链路电压vdcnom以及高压极限vhigh的权重系数。例如,如果电压vdc(t)低于标称dc链路电压vdcnom,则权重系数ωv(t)可以为1;如果电压vdc(t)高于高压极限vhigh,则权重系数wv(t)可以为0。当dc链路电容器电压vdc(t)在包括在标称dc链路电压vdcnom到高压极限vhigh之间的预定范围内发生变化时,该方法可以将权重系数ωv(t)从1线性地减小到0。
[0181]
方程(16)
[0182]
此外,该方法根据例如以下经验饱和三次方程来确定要施加的负校正分数(框140):
[0183]
方程(17)
[0184]
理解的是,当发生再生时,电流iaws(t)为负。因此,仅当有功电流ia(t)低于瞬时极限——iaistabs(t)时,分数ρ(t)计数为负且不等于零。
[0185]
此外,该方法通过以下方程将不受约束的d-q轴向校正确定为最大校正的分数(框150):
[0186]
方程(18)
[0187]
此外,该方法通过应用以下饱和度方程和校正方程来确定受约束的d-q轴向电流校正(框160):
[0188]
方程(19)
[0189]
方程(20)
[0190]
其中,kqd是正调谐增益,该正调谐增益可以用于在饱和发生时将最初针对q轴计算的校正转移到d轴部分。
[0191]
例如,当马达速度为正时,该方法可能仅允许q轴校正为负,反之亦然。
[0192]
该方法可以在受约束的q轴校正与不受约束的q轴校正不同的情况下执行为负且经放大的d轴校正。
[0193]
此外,该方法可以通过加法器30、31来确定电流调节器的经修改的电流基准(框160):
[0194]
方程(21)
[0195]
在基于逆变器的设备1中使用有源电压限制器单元15所产生的优点是显著的。
[0196]
有源电压限制器单元的技术效果是,通过旋转受控电流矢量以修改电流参数,从而在电流开始变为负时将有功电流的大小减小为零。
[0197]
此外,与已知的基于逆变器的设备相比,基于无电容器的逆变器的设备更便宜且体积更小。实际上,基于逆变器的设备无需使用专用电路系统(pfc)即可限制谐波,从而提高了逆变器的预期使用寿命,这要归功于例如使用薄膜电容器而非电解式电容器。此外,由于在开关期间施加的电压有限,基于无电容器的逆变器的设备减少了emc发射。
[0198]
然而,显然,在不脱离本发明的范围的情况下,可以对基于逆变器的设备和控制方法做出改变和变型。
[0199]
图5展示了基于逆变器的设备1a的第二实施例,该基于逆变器的设备与图3所示的基于逆变器的设备1相似并且其组成部分(在可能的情况下)将由与表示基于逆变器的设备1的对应部分的那些附图标记相同的附图标记来表示。
[0200]
参照图5,基于逆变器的设备1a与图3所示的基于逆变器的设备1的不同之处在于:马达控制器级6的电流调节器系统14被替换为无传感器的扭矩/通量调节器系统114,并且有源电压限制器单元15被替换为有源电压限制器单元115,该有源电压限制器单元115与该无传感器的扭矩/通量调节器系统114配合以便调节由无传感器的扭矩/通量调节器系统114本身控制逆变器5的开关单元所使用的扭矩基准tref,如下文详细披露的。
[0201]
此外,基于逆变器的设备1a与图3所示的基于逆变器的设备1的不同之处在于其包括将在下文详细披露的电压clarke直接转换级127和比较器129。
[0202]
根据图5所展示的第二实施例,无传感器的扭矩/通量调节器系统114被配置成在输入端处接收关于三相感测电流iu(t)、iv(t)、iw(t)的信息。此外,无传感器的扭矩/通量调节器系统114被配置成在输入端处接收关于以上针对图3所展示的第一实施例详细披露的信号uu(t)、uv(t)、uw(t)的信息,并接收关于由电压传感器13提供的感测电压vdc(t)的
信息。
[0203]
无传感器的扭矩/通量调节器系统114进一步被配置成接收关于马达控制值/参数(即,扭矩基准tref和通量基准ψref)的信息。
[0204]
扭矩基准tref可以取决于通过图2所展示的衣物处理机100的电子控制单元110提供的目标扭矩tt。例如,电子控制单元110可以被配置成基于所选择的衣物处理程序来控制洗衣机的操作。优选地,电子控制单元110可以被配置成基于衣物处理机100正在执行的衣物处理程序来提供被(瞬时地)调节的目标扭矩tt。优选地,目标扭矩tref可以对应于与要被提供给滚筒104的扭矩相对应的马达。
[0205]
可以通过衣物处理机100的电子控制单元110来提供通量基准ψref。优选地,电子控制单元110可以被配置成根据衣物处理机100正在执行的衣物处理程序来提供通量基准ψref。
[0206]
无传感器的扭矩/通量调节器系统114进一步被配置成提供多个逆变器控制信号、优选地为六个逆变器控制信号g
uh
(t)、g
ul
(t)、g
vh
(t)、g
vl
(t)、g
wh
(t)、g
wl
(t)(在图5中示意性地展示)。理解的是,逆变器控制信号g
uh
(t)、g
ul
(t)、g
vh
(t)、g
vl
(t)、g
wh
(t)、g
wl
(t)被配置成控制逆变器5的开关单元。例如,逆变器控制信号g
uh
(t)、g
ul
(t)、g
vh
(t)、g
vl
(t)、g
wh
(t)、g
wl
(t)可以指示被提供给逆变器5的开关单元(未展示)的命令信号的占空比。逆变器控制信号g
uh
(t)、g
ul
(t)、g
vh
(t)、g
vl
(t)、g
wh
(t)、g
wl
(t)也可以是指示要施加到电动马达6的每一相的dc链路电压的分数的每单位信号。理解的是,逆变器控制信号g
uh
(t)、g
ul
(t)、g
vh
(t)、g
vl
(t)、g
wh
(t)、g
wl
(t)可以与脉冲宽度调制信号(pwm)相关联。
[0207]
根据图5所示的第二实施例,无传感器的扭矩/通量调节器系统114可以优选地包括:减法器级120、扭矩滞后控制级121、减法器级122、通量滞后控制级123、开关表级124、以及无传感器的扭矩/通量估计器级128。
[0208]
无传感器的扭矩/通量估计器级128可以配置成:在输入端处接收电流iu(t)、iv(t)、iw(t),在输入端处接收信号u
u
(t)、u
v
(t)、u
w
(t),基于三相感测电流iu(t)、iv(t)、iw(t)和信号u
u
(t)、u
v
(t)、u
w
(t)来估计扭矩信号t,并且输出所估计的扭矩信号t。所估计的扭矩信号t包括指示在滚筒104旋转期间电动马达2的实际扭矩的值。优选地,所估计的扭矩信号t包括指示电动马达2的马达轴上的实际扭矩的值。
[0209]
无传感器的扭矩/通量估计器级128可以进一步被配置成:基于三相感测电流iu(t)、iv(t)、iw(t)和信号u
u
(t)、u
v
(t)、u
w
(t)来估计通量信号ψ,并且输出所估计的通量信号ψ。所估计的通量ψ指示在滚筒104旋转期间电动马达2的实际磁通量。
[0210]
理解的是,由无传感器的扭矩/通量估计器级128执行的以基于马达电流iu(t)、iv(t)、iw(t)和信号u
u
(t)、u
v
(t)、u
w
(t)来估计电动马达6的实际磁通量ψ和实际扭矩t的操作是已知的并且将不作进一步描述。
[0211]
参照图5,减法器级120被配置成:在输入端处接收扭矩基准tref和所估计的马达扭矩t,基于扭矩基准tref与所估计的马达扭矩t之差来确定扭矩误差te,并且输出所计算出的扭矩误差te。
[0212]
扭矩滞后控制级121被配置成接收扭矩误差te并提供扭矩控制信号dte。
[0213]
根据示例性实施例,扭矩滞后控制级121可以包括多个电平滞后控制器。例如,扭矩滞后控制级121可以包括具有对应值的三个预定扭矩控制信号dte(i)(其中,i是从1到3
的索引),并且基于所接收到的扭矩误差te来选择性地输出这三个预定扭矩控制信号dte(i)中的一个扭矩控制信号dte。
[0214]
减法器级122被配置成:在输入端处接收基准通量ψref和所估计的通量ψ,基于基准通量ψref与所估计的通量ψ之差来确定通量误差ψe,并且输出所计算出的通量误差ψe。
[0215]
通量滞后控制级123被配置成接收通量误差ψe并提供通量控制信号dψe。
[0216]
优选地,通量滞后控制级123可以包括多个电平滞后控制器。例如,通量滞后控制级123可以包括具有对应值的两个预定通量控制信号dψe(i)(其中,i是从1到2的索引),并且基于所接收到的通量误差ψe来选择性地输出所述两个预定通量控制信号dψe(i)中的通量控制信号dψe。
[0217]
理解的是,与以下各项相关联的信号可以是任何时变电信号:扭矩基准tref、所估计的马达扭矩t、所估计的通量ψ以及基准通量ψref。
[0218]
关于开关表单元124,该开关表单元被配置成:在输入端处接收通量控制信号dψe和扭矩控制信号dte,并且基于通量控制信号dψe和扭矩控制信号dte来确定逆变器控制信号g
uh
(t)、g
ul
(t)、g
vh
(t)、g
vl
(t)、g
wh
(t)、g
wl
(t)。
[0219]
优选地,开关表单元124可以被配置成执行开关电压矢量系统/算法。优选地,开关电压矢量算法可以包括由逆变器信号g
uh
(t)、g
ul
(t)、g
vh
(t)、g
vl
(t)、g
wh
(t)、g
wl
(t)的八种相应的不同配置组成的八个不同的开关电压矢量。优选地,矢量g
uh
(t)、g
ul
(t)、g
vh
(t)、g
vl
(t)、g
wh
(t)、g
wl
(t)中的每个矢量可以基于通量控制信号dψe和扭矩控制信号dte来调节。
[0220]
clarke直接转换级127被配置成将三相电压信号u
u
(t)、u
v
(t)、u
w
(t)转换为两相α,βpark坐标系(静止参考坐标系),并且输出指示逆变器5的开关单元的占空比的电压信号uα(t)和uβ(t)。
[0221]
clarke直接转换级126被配置成将三相感测电流iu(t)、iv(t)、iw(t)转换为两相α,βpark坐标系(静止参考坐标系),并且输出电流值iα(t)和iβ(t)。
[0222]
参照图5所展示的第二实施例,有源电压限制器单元115被配置成在输入端处接收:两相α,βpark坐标系中的电流信号iα(t)、电流信号iβ(t)、信号uα(t)、两相α,βpark坐标系中的信号uβ(t)、以及dc链路电容器11的电压vdc(t)。
[0223]
有源电压限制器单元115被配置成基于电流信号iα(t)、电流信号iβ(t)、电压信号uα(t)、电压信号uβ(t)和电压vdc(t)、通过实施下文所披露的方法来提供扭矩极限tref_lim信号。
[0224]
优选地,有源电压限制器单元115被配置成基于扭矩极限tref_lim来调节扭矩基准tref,以便将dc链路电容器电压vdc(t)限制在预定电压范围内。
[0225]
根据图5所展示的优选实施例,有源电压限制器单元115被配置成通过执行方程12b)来计算有功电流ia(t):
[0226]
ia(t)=iα(t)*uα(t)+iβ(t)*uβ(t)
[0227]
此外,有源电压限制器单元115被配置成根据方程(15)来计算瞬时最大允许再生电流iaistabs(t)。
[0228]
更具体地,基于所测量电压电平和与用于再生的最大绝对有功电流ia(t)相对应的预定参数iamaxabs来计算最大允许再生电流iaistabs(t)
[0229]
iaistabs(t)=ωv*iamaxabs
[0230]
其中,ωv是取决于电压vdc(t)和标称dc链路电压vdcnom以及高压极限vhigh的权重系数。例如,如果电压vdc(t)低于标称dc链路电压vdcnom,则权重系数ωv可以为1;如果电压vdc(t)高于高压极限vhigh,则权重系数wv(t)可以为0。当dc链路电容器电压vdc(t)在包括在标称dc链路电压vdcnom到高压极限vhigh之间的预定范围内发生变化时,该方法可以将权重系数ωv从1线性地减小到0。
[0231]
有源电压限制器单元115进一步被配置成计算指示有功电流ia(t)与最大允许再生电流iaistabs(t)之差的值δi:
[0232]
δi=ia(t)-iaistabs(t)
[0233]
有源电压限制器单元115还可以包括比例积分调节器115a,该比例积分调节器接收值δi、对值δi执行比例积分函数(pi函数),以计算用于调节扭矩基准tref的扭矩极限tref_lim。
[0234]
有源电压限制器单元115的比例积分调节器115a在输入端处将所计算出的扭矩极限tref_lim提供给比较器129。
[0235]
比较器129被配置成:在输入端处接收优选地来自电子控制单元110的扭矩目标tt,在输入端处接收来自有源电压限制器单元115的扭矩极限tref_lim,在输入端处接收马达速度ω,将扭矩目标tt与扭矩极限tref_lim进行比较,并且根据以下四个条件中的已满足条件来设置扭矩基准tref:
[0236]
如果
[0237]
如果
[0238]
更具体地:
[0239]
当马达速度ω为正(ω>0)并且扭矩目标tt(t)大于扭矩极限tref_lim(t)时,比较器129被配置成将扭矩基准tref(t)设置为扭矩目标tt(t),即,执行tref(t)=tt(t);
[0240]
当马达速度ω为正并且扭矩目标tt(t)小于或等于扭矩极限tref_lim(t)时,比较器129被配置成将扭矩基准tref(t)设置为扭矩极限tref_lim(t),即,执行tref(t)=tref_lim(t)。
[0241]
此外,
[0242]
当马达速度ω为负(ω<=0)并且扭矩目标tt(t)小于扭矩极限tref_lim(t)时,比较器129被配置成将扭矩基准tref设置为扭矩目标tt(t),即,执行tref(t)=tt(t);
[0243]
当马达速度ω为负(ω<=0)并且扭矩目标tt(t)大于或等于扭矩极限tref_lim(t)时,比较器129被配置成将扭矩基准tref(t)设置为扭矩极限tref_lim(t),即,执行tref(t)=tref_lim(t)。
[0244]
有源电压限制器单元115的技术效果是,使得通过扭矩滞后控制级121来调节扭矩控制信号dte,而无需使用dc链路10上的任何电流传感器。
[0245]
要指出的是,在图5所展示的第二实施例中,有功电流计算被执行为ia(t)=iα(t)
uα(t)+iβ(t)uβ(t),
[0246]
但不使用该有功电流计算来确定新的直流基准和新的正交电流基准(idrefmod(t),iqrefmod(t)),而是从最大允许再生电流中减去iaistabs(t)所估计的有功电流ia(t),并且然后将其馈送到比例积分调节器115a,该比例积分调节器输出与要指配给扭矩基准tref的下限相对应的值tref_lim。
[0247]
如在图3所展示的第一实施例中所解释的,iaistabs(t)是从与用于再生的最大绝对有功电流相对应的预定参数iamaxabs进行加权而得到的,即iaistabs(t)=ωv(t)iamaxabs。
[0248]
理解的是,该方法的进一步推广可以包括将有源电压限制器方法扩展到进行以下操作的任何算法:测量和/或估计马达相电流并且将根据如以上针对第一实施例描述的马达相电流计算出的所估计有功电流与作用于逆变器开关单元的一个或多个受控变量进行相关,从而在电动马达2的再生阶段期间将dc链路电压vdc(t)钳位到预定值。
[0249]
要指出的是,两个实施例(即基于逆变器的设备1和1a)的技术效果是,通过直接测量和/或估计dc链路电流并且不使底部开关/上部开关短路即可实施对再生dc链路电流的有源钳位。这解决了在衣物处理机中使用的基于逆变器的设备的技术问题,这些衣物处理机的特征是具有时变负载和/或目标速度的快速变化并且受到dc链路中的由马达再生的能量引起的过电压尖峰的影响。
[0250]
例如,我们可以考虑一种洗衣机,该洗衣机配备有由具有电解电容器的逆变器控制的马达,该逆变器在小于马达的基本速度(即,马达产生最大功率和扭矩的速度)的体系下运行。在这种情况下,逆变器安全地进行操作,而不存在从电动马达再生回到dc链路的能量的任何问题。
[0251]
然而,这种情况对于本发明的无电解电容器的逆变器并不有效,其中,较小的电容值限制了施加到电动马达的最大电压并且降低了马达的基本速度。
[0252]
此外,由于缺少了大罐(如电解电容器)的过滤效果,当滚筒内部存在高不平衡负载时,增加了dc链路中出现过电压尖峰的可能性。
[0253]
在衣物处理机100中使用的以上披露的基于逆变器的设备1和1a通过直接估计dc链路电流并且不使底部开关/上部开关短路即可实施对再生dc链路电流的有源钳位从而克服该问题。
[0254]
图6是根据本发明的第二实施例的示例性控制方法的流程图,该控制方法可以由衣物处理机100的基于逆变器的设备1a的有源电压限制器单元115实施以确定扭矩极限tref_lim。
[0255]
在示例性实施例中,有源电压限制器单元115被配置成实施该方法以控制无传感器的扭矩/通量调节器系统114,从而在再生模式期间将dc链路电容器11的电压vdc(t)限制在预定电压范围内。在这方面,由有源电压限制器单元115实施的控制方法使用所估计的有功电流ia(t)和最大允许再生电流iaistabs(t)来计算极限扭矩tref_limit,该极限扭矩在目标扭矩tt大于极限扭矩tref_limit时作为扭矩基准tref被提供给无传感器的扭矩/通量调节器系统114。
[0256]
首先,该控制方法执行基于方程12b)来确定有功电流ia(t)的步骤ia(t)=iα(t)*uα(t)+iβ(t)*uβ(t)(框500)
[0257]
此外,该控制方法基于所测量电压电平和与用于再生的最大绝对有功电流ia(t)相对应的预定参数iamaxabs来计算瞬时最大允许再生电流iaistabs(t)(框510),
[0258]
iaistabs(t)=ω
v
(t)i
amaxabs
[0259]
此外,该控制方法计算指示有功电流ia(t)与最大允许再生电流iaistabs(t)之差的值δi(框520):
[0260]
δi=ia(t)-iaistabs(t)
[0261]
此外,该控制方法基于值δi、通过比例积分调节器115a计算扭矩极限tref_lim(框530)。
[0262]
此外,该控制方法控制马达速度ω是否为正(框540)。
[0263]
当马达速度ω为正(ω>0)(输出为是,框540)并且扭矩目标tt(t)大于扭矩极限tref_lim(t)(输出为否,框550)时,该方法将扭矩基准tref(t)设置为扭矩目标tt(t),即,执行tref(t)=tt(t)(框560)。
[0264]
当马达速度ω为正(输出为是,框540)并且扭矩目标tt(t)小于或等于扭矩极限tref_lim(t)(输出为是,框550)时,该方法将扭矩基准tref(t)设置为扭矩极限tref_lim(t)),即,执行tref(t)=tref_lim(t)(框570)。在这种情况下,有源电压限制器115通过施加扭矩极限tref_lim作为扭矩/通量调节器系统114所使用的扭矩基准来将dc链路电容器电压限制在预定电压范围内(框610)。
[0265]
此外,当马达速度ω为负(ω<0)(输出为否,框540)并且扭矩目标tt(t)小于扭矩极限tref_lim(t)(输出为是,框580)时,该方法将扭矩基准tref设置为扭矩目标tt(t),即,执行tref(t)=tt(t)(框590)。
[0266]
此外,当马达速度ω为负(ω<0)(输出为否,框540)并且扭矩目标tt(t)大于或等于扭矩极限tref_lim(t)(输出为否,框580)时,该方法将扭矩基准tref(t)设置为扭矩极限tref_lim(t)),即,执行tref(t)=tref_lim(t)(框600)。在这种情况下,有源电压限制器115通过施加扭矩极限tref_lim作为扭矩/通量调节器系统114所使用的扭矩基准来将dc链路电容器电压限制在预定电压范围内(框610)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1