一种具有自定位功能的保护套管的制作方法
1.本发明涉及电缆保护技术领域,更具体地说,本发明涉及一种具有自定位功能的保护套管。
背景技术:
2.电线、电缆的耐磨保护材料,针对阻燃要求较高,需要达到ul94 v0级别,常常选用编织网管、耐磨布、胶带等材料进行包裹,为防止防护材料与电线、电缆的相对滑动,必须要对防护材料两端进行扎带或者胶布的缠绕固定,无法实现自定位功能,进一步,如果电线、电缆使用在高压部位,针对防护材料防水、绝缘的要求也需要同步满足,因此需提出一种具有自定位功能的保护套管,以解决上述问题。
技术实现要素:
3.在发明内容部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
4.为实现上述目的,本发明提供如下技术方案:一种具有自定位功能的保护套管,包括:套管本体,所述套管本体由内层、外层、中间层粘接剂组成,所述中间层粘接剂设于所述内层与所述外层之间。
5.作为本发明的一种改进,所述内层由弹性材料制成。
6.作为本发明的一种改进,所述外层为编织网状结构。
7.作为本发明的一种改进,所述内层的厚度范围为0.1mm至0.5mm,直径范围为3mm至64mm。
8.作为本发明的一种改进,所述弹性材料的拉伸强度小于15mpa,断裂伸长率不小于200%,回弹率不小于90%。
9.作为本发明的一种改进,所述中间层粘接剂的粘度范围为200mpa
·
s至2000mpa
·
s。
10.作为本发明的一种改进,所述的一种具有自定位功能的保护套管,还包括:触觉传感器、构建模块、第一确定模块、第一获取模块;
11.所述触觉传感器均匀设置在所述内层内壁,且所述触觉传感器有m个;
12.所述构建模块、第一确定模块、第一获取模块依次相连,且所述构建模块与每个触觉传感器相连;
13.所述触觉传感器用于按照预设周期获取所述内层上对应位置处所受的实时压力,并当所述实时压力大于预设压力值时,按照预设周期获取所述内层上对应采样范围内的触觉信息;
14.所述构建模块用于基于每个预设周期对应采样范围内的触觉信息和保护套管内壁预设的三维点云结构以及对应采样范围内的位置信息,构建所述内层内壁对应的三维应
力动态模型;
15.所述第一确定模块用于按照预设确定方法确定所述三维应力动态模型在第一个预设周期中所述内层的内壁上的n个第一边缘点,并基于每个第一边缘点的第一坐标数据和对应的确定顺序构成第一坐标数据集合,按照预设确定方法确定所述三维应力动态模型在当前预设周期中所述内层的内壁上的n个第二边缘点,并基于每个第二边缘对应的第二坐标数据和对应的确定顺序构成第二坐标数据集合;
16.所述第一获取模块用于基于对应的确定顺序求取所述第一坐标数据集合中的坐标数据和所述第二坐标数据集合中的对应坐标数据的第一差值,确定第一差值大于第一预设差值的坐标数据的第一个数,将所述第一差值和所述第一个数输出为第一检测结果,同时,当所述第一个数大于第一预设个数时,则输出第一检测信号。
17.作为本发明的一种改进,所述的一种具有自定位功能的保护套管,还包括:第二确定模块、第二获取模块:
18.所述第二确定模块、第二获取模块依次相连;
19.所述第二确定模块与所述构建模块相连;
20.所述第二确定模块用于按照预设周期和预设分析方法分析所述三维应力动态模型,确定所述三维应力动态模型中的所有沟壑结构,并确定每个沟壑结构的三维点云形状,基于对应的三维点云形状截取每个沟壑结构的三维边框,基于对应的三维边框和预设确定方法确定每个沟壑结构的中心坐标点,基于预先存储的切点数据库,确定所述三维边框的切点信息,根据所述三维边框上所有切点信息,获得每个沟壑的最大截面面积,并求得每个预设周期对应的最大总截面面积;
21.所述第二获取模块用于获取当前预设周期对应的最大总截面面积与第一个预设周期对应的最大总截面面积的第二差值,同时,获取第一个预设周期中每个沟壑结构的第一中心坐标点数据和当前预设周期对应的第二中心坐标点数据,求得所述第一中心坐标点数据和所述第二中心坐标点数据的第三差值,将所述第二差值和所述第三差值作为第二检测结果,同时,获取所述第二差值大于第二预设差值的第二个数大于以及所述第三差值大于第三预设差值的第三个数,当所述第二个数大于第二预设个数或所述第三个数大于第三预设个数时,则输出第二检测信号。
22.作为本发明的一种改进,所述的一种具有自定位功能的保护套管,还包括:第三获取模块、第四获取模块、采集模块、匹配模块、第三确定模块;
23.所述第二确定模块、第三获取模块、第四获取模块、采集模块、匹配模块、第三确定模块依次相连;
24.所述采集模块与所述第三获取模块相连;
25.所述第三获取模块用于确定所述三维边框上每个第一坐标点与所述所述三维应力动态模型在当前预设周期的圆心坐标点之间的第一距离,基于对应的第一距离确定每个第一坐标点对应的标注值,基于所述标准值和预设的标注方法对所述三维边框进行增亮标注处理,将标注结果与所述三维应力动态模型进行融合获得三维标注模型;
26.所述第四获取模块用于获取当前预设周期中三维边框上每个第一坐标点对应的第一距离和第一个预设周期中对应的第一坐标点对应的第一距离之间的第四差值,将所述第四差值作为第三检测结果;
27.所述采集模块用于按照预设周期对所述三维标注模型的标注面进行图像采集,获得第一图像;
28.所述匹配模块用于用于获得每个标注后的三维边框在所述第一图像中对应的第二边框,按照预设分割方法对所述第二边框进行分割获得n个子线段,获得第一个预设周期中每个第二边框中包含像素点的第一总个数和当前预设周期中每个第二边框中包含像素点的第二总个数,按照第一总个数、第二总个数以及个数接近原则,将当前预设周期中的第二边框与第一个预设周期中的第二边框进行对应匹配,并按照预设轮廓匹配原则,将当前预设周期中的第二边框中的第一子线段与第一个预设周期中的第二边框中的第二子线段进行对应匹配
29.所述第三确定模块用于基于所述匹配结果和所述第一子线段的起点坐标、终点坐标以及所述第二子线段的起点坐标和终点坐标,获得所述第一子线段与对应的第二子线段的起点坐标差值和终点坐标差值以及子线段偏离角度,并将所述起点坐标差值和所述终点坐标差值以及所述子线段偏离角度作为第四检测结果,同时,获得所述起点坐标差值大于预设起点坐标差值的第四个数、所述终点坐标差值大于预设终点坐标差值的第五个数、所述子线段偏离角度大于预设子线段偏离角度的第六个数,当所述第四个数大于第四预设个数或所述第五个数大于第五预设个数或所述第六个数大于预设第六个数时,则输出第三检测信号。
30.作为本发明的一种改进,所述的一种具有自定位功能的保护套管,还包括:偏移判断模块:
31.所述偏移判断模块与所述第一获取模块、所述第二获取模块、所述第四获取模块、所述第三确定模块相连;
32.所述偏移判断模块用于当接收到所述第一检测信号或所述第二检测信号或所述第三检测信号时,将获取的所述第一检测结果、所述第二检测结果、所述第三检测结果、所述第四检测结果输入至预设的偏移判断神经网络,获得偏移判断结果,且当所述偏移判断结果为保护套管发生偏移时,发出报警信号,否则,保持当前工作状态;
33.所述偏移判断结果为:保护套管发生偏移、保护套管未发生偏移。
34.相比现有技术,本发明至少包括以下有益效果:
35.1、本发明所述的具有自定位功能的保护套管的内层为具有一定摩擦系数的弹性胶管,可以起到自粘合作用,安装套线可扩充后套入,当套在被保护的电线、电缆上后,可以紧密贴合,不易滑动,实现了自定位功能,省去安装后还需使用胶带固定的步骤。
36.2、本发明通过设立触觉传感器、构建模块、第一确定模块、第一获取模块,可以建立保护套管的内层对应的三维三维应力动态模型,可以按照预设周期比较当前预设周期与保护套管在套在被保护电线上开始的第一个周期时保护套管内层的形状是否一致,实现监控被保护电线是否发生偏移的功能,加强了保护套线的自定位准确性。
37.3、本发明通过设立第二确定模块、第二获取模块,可以对保护套管的内层的沟壑进行识别,并将当前预设周期保护套管内层的沟壑与保护套管在套在被保护电线上开始的第一个周期时保护套管内层的沟壑的总截面面积和对应的中心坐标点进行比较,基于比较结果获得后续判断被保护电线或者保护套管是否发生偏移的判断结果。
38.4、本发明通过设立第三获取模块、第四获取模块、采集模块、匹配模块、第三确定
模块,可以将当前预设周期保护套管内层的沟壑相关数据与保护套管在套在被保护电线上开始的第一个周期时保护套管内层的沟壑相关数据进行比较,获得第四检测结果,为后续获得后续判断被保护电线或者保护套管是否发生偏移的判断结果提供判断数据。
39.5、本发明通过设置偏移判断模块,可以利用获得的第一检测结果、第二检测结果、第三检测结果、第四检测结果,精准地判断出被保护电线或者保护套管是否发生偏移。
40.本发明所述的具有自定位功能的保护套管,本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
41.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
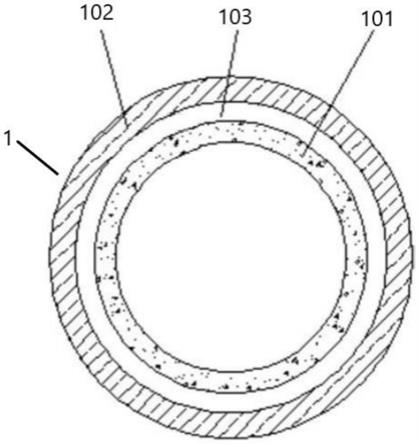
42.图1为本发明所述的具有自定位功能的保护套管的套管本体截面示意图;
43.图2为本发明所述的具有自定位功能的保护套管的外层示意图;
44.图3为本发明所述的具有自定位功能的保护套管的工作流程图;
45.图4为本发明所述的具有自定位功能的保护套管的工作流程图;
46.图5为本发明所述的具有自定位功能的保护套管的工作流程图;
47.图6为本发明所述的具有自定位功能的保护套管的工作流程图。
48.图中:1、套管本体;101、内层;102、外层;103、中间层粘接剂;104、触觉传感器;105、构建模块;106、第一确定模块;107、第一获取模块;108、第二确定模块;109、第二获取模块:110、第三获取模块;111、第四获取模块;112、采集模块;113、匹配模块;114、第三确定模块;115、偏移判断模块。
具体实施方式
49.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
50.参阅图1和2,一种具有自定位功能的保护套管,包括:套管本体1,所述套管本体1由内层101、外层102、中间层粘接剂103组成,所述中间层粘接剂103设于所述内层101与所述外层102之间。
51.上述技术方案的工作原理和有益效果:内层101为具有一定摩擦系数的弹性胶管,可以起到自粘合作用,安装套线可扩充后套入,当套在被保护的电线、电缆上后,可以紧密贴合,不易滑动,实现了自定位功能,省去安装后还需使用胶带固定的步骤。
52.在本发明的一个实施例中,所述内层101由弹性材料制成。
53.该实施例中,内层为弹性胶管,且可选用弹性较好的聚氯乙烯(pvc)、tpe、tpee、tpu、硅胶、sbr橡胶、abs橡胶、天然橡胶等具有一定摩擦系数的弹性材料。
54.上述技术方案的工作原理和有益效果:可以起到自粘合作用,同时高弹性的内层胶管不会影响编织的扩张性。
55.在本发明的一个实施例中,所述外层102为编织网状结构。
56.上述技术方案的工作原理和有益效果:编织网状结构具有良好的耐磨性,同时高
弹性的内层胶管不会影响编织的扩张性。
57.在本发明的一个实施例中,所述内层101的厚度范围为0.1mm至0.5mm,直径范围为3mm至64mm。
58.上述技术方案的工作原理和有益效果:通过内层101的该厚度与直径设计,使内层101具备良好的拉伸性能。
59.在本发明的一个实施例中,所述弹性材料的拉伸强度小于15mpa,断裂伸长率不小于200%,回弹率不小于90%。
60.该实施例中,可选用弹性较好的聚氯乙烯(pvc)、tpe、tpee、tpu、硅胶、sbr橡胶、abs橡胶、天然橡胶等具有一定摩擦系数的弹性胶管。
61.上述技术方案的工作原理和有益效果:在15mpa的拉伸强度内,内层101具备良好的拉伸效果,方便电缆的安装。
62.在本发明的一个实施例中,所述中间层粘接剂103的粘度范围为200mpa
·
s至2000mpa
·
s。
63.该实施例中,中间层粘接剂103可选用苯丙乳液、丙烯酸酯乳液、醋酸乙烯酯乳液、硅橡胶胶黏剂等,且可以将苯丙乳液、丙烯酸酯乳液、醋酸乙烯酯乳液、硅橡胶胶黏剂等稀释至浓度范围为5wt%至100wt%。。
64.上述技术方案的工作原理和有益效果:中间层粘接剂103选用苯丙乳液、丙烯酸酯乳液、醋酸乙烯酯乳液、硅橡胶胶黏剂中的至少一种,以上粘接剂原材料的粘度范围均在200mpa
·
s至2000mpa
·
s,具有耐高温、耐低温、绝缘、防水、耐候等优异性能。
65.参考图3,在本发明的一个实施例中,所述的一种具有自定位功能的保护套管,还包括:触觉传感器104、构建模块105、第一确定模块106、第一获取模块107;
66.所述触觉传感器104均匀设置在所述内层101内壁,且所述触觉传感器104有m个;
67.所述构建模块105、第一确定模块106、第一获取模块107依次相连,且所述构建模块105与每个触觉传感器104相连;
68.所述触觉传感器104用于按照预设周期获取所述内层101上对应位置处所受的实时压力,并当所述实时压力大于预设压力值时,按照预设周期获取所述内层101上对应采样范围内的触觉信息;
69.所述构建模块105用于基于每个预设周期对应采样范围内的触觉信息和保护套管内壁预设的三维点云结构以及对应采样范围内的位置信息,构建所述内层101内壁对应的三维应力动态模型;
70.所述第一确定模块106用于按照预设确定方法确定所述三维应力动态模型在第一个预设周期中所述内层101的内壁上的n个第一边缘点,并基于每个第一边缘点的第一坐标数据和对应的确定顺序构成第一坐标数据集合,按照预设确定方法确定所述三维应力动态模型在当前预设周期中所述内层101的内壁上的n个第二边缘点,并基于每个第二边缘对应的第二坐标数据和对应的确定顺序构成第二坐标数据集合;
71.所述第一获取模块107用于基于对应的确定顺序求取所述第一坐标数据集合中的坐标数据和所述第二坐标数据集合中的对应坐标数据的第一差值,确定第一差值大于第一预设差值的坐标数据的第一个数,将所述第一差值和所述第一个数输出为第一检测结果,同时,当所述第一个数大于第一预设个数时,则输出第一检测信号。
72.该实施例中,触觉信息例如有:当前位置对应的坐标点值。
73.该实施例中,位置信息为对应触觉传感器的安装位置的坐标值。
74.该实施例中,n个第一边缘点为即为所述三维应力动态模型在第一个预设周期中保护套管内层101内壁上的边缘点;
75.n个第二边缘点为即为所述三维应力动态模型在当前预设周期中保护套管内层101内壁上的边缘点。
76.该实施例中,三维应力动态模型即为保护套管内层与被保护电线接触时,保护套管内层内壁所受到的动态应力对应的三维模型。
77.该实施例中,第一坐标数据集合即为将在一个预设周期中所述内层101的内壁上的确定的的n个第一边缘点对应的坐标值按照对应的确定顺序排列形成的。
78.该实施例中,第二坐标数据集合即为将在当前预设周期中所述内层101的内壁上的确定的的n个第一边缘点对应的坐标值按照对应的确定顺序排列形成的。
79.该实施例中,第一差值即为第一坐标数据集合中的边缘点的坐标值与第二坐标数据集合中对应边缘点的坐标值的差值;
80.计算第一差值包括:
[0081][0082]
式中,d1为第一差值,a1为第一坐标数据集合中对应边缘点的横坐标值,a2为第二坐标数据集合中对应边缘点的横坐标值,b1为第一坐标数据集合中对应边缘点的纵坐标值,b2为第二坐标数据集合中对应边缘点的纵坐标值,c1为第一坐标数据集合中对应边缘点的竖坐标值,c2为第二坐标数据集合中对应边缘点的竖坐标值;
[0083]
例如:第一坐标数据集合中的边缘点的坐标值为(a1,b1,c1)为(3,4,5),第二坐标数据集合中的边缘点的坐标值为(a2,b2,c2)为(4,4,5),则第一差值d1为1。
[0084]
该实施例中,所述第一预设差值为保护套管可能发生偏移时,所述第一坐标数据集合中的坐标数据和所述第二坐标数据集合中的对应坐标数据的差值阈值。
[0085]
该实施例中,所述第一预设个数为保护套管可能发生偏移时,第一差值大于第一预设差值的坐标数据的个数阈值。
[0086]
上述技术方案的有益效果为:本发明通过设立触觉传感器104、构建模块105、第一确定模块106、第一获取模块107,可以建立保护套管的内层对应的三维三维应力动态模型,可以按照预设周期比较当前预设周期与保护套管在套在被保护电线上开始的第一个周期时保护套管内层的形状是否一致,实现监控被保护电线是否发生偏移的功能,加强了保护套线的自定位准确性。
[0087]
参考图4,在本发明的一个实施例中,所述的一种具有自定位功能的保护套管,还包括:第二确定模块108、第二获取模块109:
[0088]
所述第二确定模块108、第二获取模块109依次相连;
[0089]
所述第二确定模块108与所述构建模块105相连;
[0090]
所述第二确定模块108用于按照预设周期和预设分析方法分析所述三维应力动态模型,确定所述三维应力动态模型中的所有沟壑结构,并确定每个沟壑结构的三维点云形状,基于对应的三维点云形状截取每个沟壑结构的三维边框,基于对应的三维边框和预设
确定方法确定每个沟壑结构的中心坐标点,基于预先存储的切点数据库,确定所述三维边框的切点信息,根据所述三维边框上所有切点信息,获得每个沟壑的最大截面面积,并求得当前预设周期对应的最大总截面面积与第一个预设周期对应的最大总截面面积;
[0091]
所述第二获取模块109用于获取当前预设周期对应的最大总截面面积与第一个预设周期对应的最大总截面面积的第二差值,同时,获取第一个预设周期中每个沟壑结构的第一中心坐标点数据和当前预设周期对应的第二中心坐标点数据,求得所述第一中心坐标点数据和所述第二中心坐标点数据的第三差值,将所述第二差值和所述第三差值作为第二检测结果,同时,获取所述第二差值大于第二预设差值的第二个数大于以及所述第三差值大于第三预设差值的第三个数,当所述第二个数大于第二预设个数或所述第三个数大于第三预设个数时,则输出第二检测信号。
[0092]
该实施例中,沟壑结构即为保护套管内层与被保护电线接触时,保护套管内层内壁上形成的凹凸不平的结构中凹型结构。
[0093]
该实施例中,三维点云形状即为按照预设的方式排列三维坐标点的数据集从而把献出沟壑结构的形状。
[0094]
该实施例中,三维边框即为所述沟壑结构的三维轮廓。
[0095]
该实施例中,中心坐标点即为沟壑结构中的表示沟壑结构中心的坐标点。
[0096]
该实施例中,切点数据库预设的包含切点信息的数据库。
[0097]
该实施例中,切点信息可以是指基于某个线段的切点坐标等。
[0098]
该实施例中,三维边框上所有切点围成的形状面积即为对应沟壑结构的最大截面面积。
[0099]
该实施例中,求得所述第一中心坐标点数据和所述第二中心坐标点数据的第三差值,包括:
[0100][0101]
式中,d3为第三差值,x1为第一中心坐标点数据的横坐标值,a2为第二中心坐标点数据的横坐标值,y1为第一中心坐标点数据的的纵坐标值,b2为第二中心坐标点数据的纵坐标值;
[0102]
例如:第一中心坐标点数据的坐标值为(x1,y1)为(3,4),第二中心坐标点数据的坐标值为(x2,y2)为(4,5),则第一差值d3为1.414。
[0103]
该实施例中,第二预设差值为保护套管可能发生偏移时,当前预设周期对应的最大总截面面积与第一个预设周期对应的最大总截面面积的差值阈值。
[0104]
该实施例中,第二预设个数为保护套管可能发生偏移时,第二差值大于第二预设差值的个数阈值。
[0105]
该实施例中,第三预设差值为保护套管可能发生偏移时,所述第一中心坐标点数据和所述第二中心坐标点数据的差值阈值。
[0106]
该实施例中,第三预设个数为保护套管可能发生偏移时,所述第三差值大于第三预设差值的个数阈值。
[0107]
上述技术方案的工作原理和有益效果:本发明通过设立第二确定模块108、第二获取模块109,可以对保护套管的内层的沟壑进行识别,并将当前预设周期保护套管内层的沟
壑与保护套管在套在被保护电线上开始的第一个周期时保护套管内层的沟壑的总截面面积和对应的中心坐标点进行比较,基于比较结果获得后续判断被保护电线或者保护套管是否发生偏移的判断结果。
[0108]
参考图5,在本发明的一个实施例中,所述的一种具有自定位功能的保护套管,还包括:第三获取模块110、第四获取模块111、采集模块112、匹配模块113、第三确定模块114;
[0109]
所述第二确定模块108、第三获取模块110、第四获取模块111、采集模块112、匹配模块113、第三确定模块114依次相连;
[0110]
所述采集模块112与所述第三获取模块110相连;
[0111]
所述第三获取模块110用于确定所述三维边框上每个第一坐标点与所述三维应力动态模型在当前预设周期的圆心坐标点之间的第一距离,基于对应的第一距离确定每个第一坐标点对应的标注值,基于所述标准值和预设的标注方法对所述三维边框进行增亮标注处理,将标注结果与所述三维应力动态模型进行融合获得三维标注模型;
[0112]
所述第四获取模块111用于获取当前预设周期中三维边框上每个第一坐标点对应的第一距离和第一个预设周期中对应的第一坐标点对应的第一距离之间的第四差值,将所述第四差值作为第三检测结果;
[0113]
所述采集模块112用于按照预设周期对所述三维标注模型的标注面进行图像采集,获得第一图像;
[0114]
所述匹配模块113用于获得每个标注后的三维边框在所述第一图像中对应的第二边框,按照预设分割方法对所述第二边框进行分割获得n个子线段,获得第一个预设周期中每个第二边框中包含像素点的第一总个数和当前预设周期中每个第二边框中包含像素点的第二总个数,按照第一总个数、第二总个数以及个数接近原则,将当前预设周期中的第二边框与第一个预设周期中的第二边框进行对应匹配,并按照预设轮廓匹配原则,将当前预设周期中的第二边框中的第一子线段与第一个预设周期中的第二边框中的第二子线段进行对应匹配;
[0115]
所述第三确定模块114用于基于所述匹配结果和所述第一子线段的起点坐标、终点坐标以及所述第二子线段的起点坐标和终点坐标,获得所述第一子线段与对应的第二子线段的起点坐标差值和终点坐标差值以及子线段偏离角度,并将所述起点坐标差值和所述终点坐标差值以及所述子线段偏离角度作为第四检测结果,同时,获得所述起点坐标差值大于预设起点坐标差值的第四个数、所述终点坐标差值大于预设终点坐标差值的第五个数、所述子线段偏离角度大于预设子线段偏离角度的第六个数,当所述第四个数大于第四预设个数或所述第五个数大于第五预设个数或所述第六个数大于预设第六个数时,则输出第三检测信号。
[0116]
该实施例中,三维标注模型即为在三维应力动态模型基础上按照预设规则进行标注后获得的模型。
[0117]
该实施例中,第一子线段即为第一个预设周期中的二维边框中的子线段。
[0118]
该实施例中,第二子线段即为当前预设周期中的二维边框中的子线段。
[0119]
该实施例中,所述第四预设个数为保护套管可能发生偏移时,所述起点坐标差值大于预设起点坐标差值的个数阈值。
[0120]
该实施例中,所述第五预设个数为保护套管可能发生偏移时,所述终点坐标差值
大于预设终点坐标差值的个数阈值。
[0121]
该实施例中,所述第六预设个数为保护套管可能发生偏移时,所述子线段偏离角度大于预设子线段偏离角度的个数阈值。
[0122]
该实施例中,确定所述三维边框上每个第一坐标点与所述三维应力动态模型在当前预设周期的圆心坐标点之间的第一距离,基于对应的第一距离确定每个第一坐标点对应的标注值,包括:
[0123]
首先,基于所述三维边框上每个第一坐标点与所述三维应力动态模型在当前预设周期的圆心坐标点之间的第一距离,计算出每个第一坐标点的标注因子:
[0124][0125]
式中,i为第i个第一坐标点,a
i
为第i个第一坐标点的标注因子,α为标注因子系数,x0为所述三维应力动态模型在当前预设周期的圆心坐标点横坐标值,y0为所述三维应力动态模型在当前预设周期的圆心坐标点纵坐标值,x
′
i
为第i个第一坐标点的横坐标值,y
′
i
为第i个第一坐标点的纵坐标值,r为保护套管的外径,l1为保护套管的外层厚度,l2为保护套管的中间粘结剂厚度,l3为保护套管的内层平均厚度;
[0126]
然后,基于每个第一坐标点的标注因子计算出对应第一坐标点的标注值:
[0127][0128]
式中,s
i
为第i个第一坐标点的标注值;
[0129]
例如,标注因子系数α为10,为所述三维应力动态模型在当前预设周期的圆心坐标点横坐标值x0为0,所述三维应力动态模型在当前预设周期的圆心坐标点纵坐标值y0为0,第i个第一坐标点的横坐标值x
′
i
为5,第i个第一坐标点的纵坐标值y
′
i
为5,保护套管的外径r为10,保护套管的外层厚度l1为1,保护套管的中间粘结剂厚度l2为1,保护套管的内层平均厚度l3为1,则第i个第一坐标点的标注值s
i
为71.428。
[0130]
上述技术方案的工作原理和有益效果:本发明通过设立第三获取模块110、第四获取模块111、采集模块112、匹配模块113、第三确定模块114,可以将当前预设周期保护套管内层的沟壑相关数据与保护套管在套在被保护电线上开始的第一个周期时保护套管内层的沟壑相关数据进行比较,获得第四检测结果,为后续获得后续判断被保护电线或者保护套管是否发生偏移的判断结果提供判断数据,且确定所述三维边框上每个第一坐标点与所述三维应力动态模型在当前预设周期的圆心坐标点之间的第一距离,基于对应的第一距离确定每个第一坐标点对应的标注值,使得基于第一距离获得的标注因子考虑到了保护套管的外层、内层和中间粘结剂的厚度,基于求得的标注因子获得每个第一坐标点的标注值增亮标注处理三维边框,可以使获得的三维标注模型能更加直观的检测到沟壑结构的第二边框,使得后续子线段的皮噢诶和比较更加容易。
[0131]
参考图6,在本发明的一个实施例中,所述的一种具有自定位功能的保护套管,还包括:偏移判断模块115:
[0132]
所述偏移判断模块115与所述第一获取模块107、所述第二获取模块109、所述第四获取模块111、所述第三确定模块114相连;
[0133]
所述偏移判断模块115用于当接收到所述第一检测信号或所述第二检测信号或所
述第三检测信号时,将获取的所述第一检测结果、所述第二检测结果、所述第三检测结果、所述第四检测结果输入至预设的偏移判断神经网络,获得偏移判断结果,且当所述偏移判断结果为保护套管发生偏移时,发出报警信号,否则,保持当前工作状态;
[0134]
所述偏移判断结果为:保护套管发生偏移、保护套管未发生偏移。
[0135]
上述技术方案的工作原理和有益效果:本发明通过设置偏移判断模块115,可以利用获得的第一检测结果、第二检测结果、第三检测结果、第四检测结果,精准地判断出被保护电线或者保护套管是否发生偏移。
[0136]
在本发明的描述中,需要理解的是,术语“上端”、“下端”、“前端”、“后端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0137]
最后应说明的是:以上所述仅为本发明的优选实施例而已。并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1