一种用于控制矢量电机的电阻电感参数识别方法与流程
1.本发明涉及矢量电机的电阻电感参数识别领域,特别涉及一种用于控制矢量电机的电阻电感参数识别方法。
背景技术:
2.目前,随着电机技术的不断发展,普通电机由于存在损耗较大,因此,业内正在逐步侧重研究矢量电机,矢量电机相较于普通电机,其在工作时声音会更小,且能点的输出和利用率也较高,因此,矢量电机较为省电,对于矢量电机而言,其电阻和电感参数的至关重要,这两个参数可以用来判断矢量电机是否正常运转,工作人员也可以参考矢量电机的电阻和电感参数及时对矢量电机的性能及时了解,保证矢量电机的负载能够良好运行。
3.参见申请号为cn201810685441.8的专利申请,其公开了一种表贴式永磁同步电机电阻电感参数离线辨识方法,通过对表贴式永磁同步电机定子绕组在两相静止坐标系直轴注入高频电压信号,检测三相定子电流,并变换到两相静止坐标系;将两相电流平方和作为输出信号,将高频电压信号幅值作为输入信号,根据注入的高频电压信号的两种频率和电流稳态值平方和,获取电阻与电感,完成对表贴式永磁同步电机电阻电感参数的离线辨识。该专利申请提出的一种表贴式永磁同步电机电阻电感参数离线辨识方法,测量结果精度高,且无需通过抱闸机械装置保证电机静止、无需在检测电感时忽略电阻压降以及无需采用两种方法分别测试电阻和电感。
4.然而,矢量电机在不同运转状态下,其电阻和电感并不完全相同,且矢量电机长时间运行后,电阻温度会升高,通过输入电压直接计算电流,进而计算电阻,需要实时采样,且不能保证计算的电阻和电感的实时性。
技术实现要素:
5.本发明的目的是提供一种用于控制矢量电机的电阻电感参数识别方法,能够准确、及时识别出矢量电机在各个运转状态下的电阻和电感。
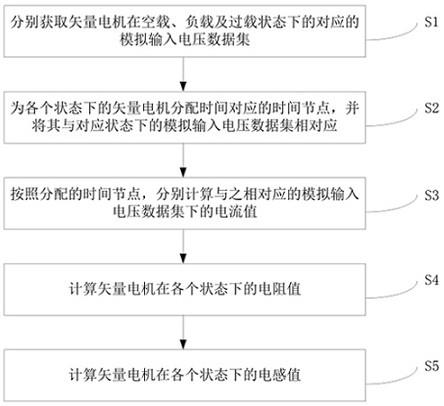
6.本发明解决其技术问题,采用的技术方案是:一种用于控制矢量电机的电阻电感参数识别方法,包括如下步骤:分别获取矢量电机在空载、负载及过载状态下的对应的模拟输入电压数据集;为各个状态下的矢量电机分配时间对应的时间节点,并将其与对应状态下的模拟输入电压数据集相对应;按照分配的时间节点,分别计算与之相对应的模拟输入电压数据集下的电流值;计算矢量电机在各个状态下的电阻值;计算矢量电机在各个状态下的电感值。
7.进一步的是,所述分别获取矢量电机在空载、负载及过载状态下的对应的模拟输入电压数据集,其中,矢量电机在每个状态下的模拟电压数据集均对应有矢量电机在各个状态下运行时的温度系数。
8.进一步的是,矢量电机在空载状态下对应的模拟电压数据集至少包括10个不同的模拟输入电压一,所述10个不同的模拟输入电压一呈线性递增分布。
9.进一步的是,矢量电机在负载状态下对应的模拟电压数据集至少包括100个不同的模拟输入电压二,所述100个不同的模拟输入电压二依据负载的量级随机划分,负载的量级为10级,每个负载量级下对应于10个随机划分的模拟输入电压二。
10.进一步的是,矢量电机在过载状态下的对应的模拟输入电压数据集至少包括10个不同的模拟输入电压三,所述10个不同的模拟输入电压三随机分布。
11.进一步的是,所述为各个状态下的矢量电机分配时间对应的时间节点,并将其与对应状态下的模拟输入电压数据集相对应,其中,所述时间节点的分配规则为:若矢量电机处于空载状态,则根据矢量电机在空载状态下模拟输入电压一的个数递增分配时间节点一,且每相邻的两个时间节点一间的差值均为10分钟;若矢量电机处于负载状态,则根据矢量电机在负载状态下的模拟输入电压二的个数随机分配与之相对应时间节点二,其中,任意两个时间节点二间的差值不小于20分钟;若矢量电机处于过载状态,则根据矢量电机在过载状态下模拟输入电压三的个数随机分配与之相对应的时间节点三,其中,任意两个时间节点三间的差值不小于30分钟。
12.进一步的是,所述电流值为正弦电流值。
13.进一步的是,当计算出各个时间节点下不同模拟输入电压数据集下的正弦电流值后,计算正弦电流值的幅值衰减,然后再计算矢量电机在各个状态下的电阻值。
14.本发明的有益效果是:通过上述一种用于控制矢量电机的电阻电感参数识别方法,首先,分别获取矢量电机在空载、负载及过载状态下的对应的模拟输入电压数据集,其次,为各个状态下的矢量电机分配时间对应的时间节点,并将其与对应状态下的模拟输入电压数据集相对应,然后,按照分配的时间节点,分别计算与之相对应的模拟输入电压数据集下的电流值,然后,计算矢量电机在各个状态下的电阻值,最后,计算矢量电机在各个状态下的电感值。
15.本发明将矢量电机的运行状态进行了细分,即细分成空载、负载和过载状态,由于矢量电机在不同状态下,其自身电阻加上负载电阻的总值在各个状态下差异会很大,且并不是呈线性关系,所以,本发明可以依据矢量电机在不同状态下的具体情况为其分配不同的模拟输入电压,以保证计算得到的电阻值和电感值是准确的,同时,本发明能够在不同状态下分别模拟计算矢量电机的电阻值和电感值,也能保证计算的电阻值和电感值是实时的,因此,能够最大限度避免系统误差。
附图说明
16.图1为本发明一种用于控制矢量电机的电阻电感参数识别方法的流程图。
具体实施方式
17.下面结合附图,详细描述本发明的技术方案。
18.本发明提出的是一种用于控制矢量电机的电阻电感参数识别方法,其流程图见图1,其中,该方法包括如下步骤:s1.分别获取矢量电机在空载、负载及过载状态下的对应的模拟输入电压数据集;
s2.为各个状态下的矢量电机分配时间对应的时间节点,并将其与对应状态下的模拟输入电压数据集相对应;s3.按照分配的时间节点,分别计算与之相对应的模拟输入电压数据集下的电流值;s4.计算矢量电机在各个状态下的电阻值;s5.计算矢量电机在各个状态下的电感值。
19.上述方法中,提到的分别获取矢量电机在空载、负载及过载状态下的对应的模拟输入电压数据集,其中,矢量电机在每个状态下的模拟电压数据集均对应有矢量电机在各个状态下运行时的温度系数,这里,考虑到矢量电机在空载时其电阻温度明显会区别于负载状态和过载状态的电阻值,并且,即使在正常负载情况下,矢量电机的电阻也会有所差异,对于过载情况而言,其温度差异更大,因此,本发明需要依据矢量电机的运行状态分别为各个状态下分配不同的模拟输入电压,以便准确完成电阻和电感的模拟测试。
20.具体应用时,由于空载状态下,矢量电机的温度变化不会太大,会保持在较为稳定的范围,其电阻值也相对较为稳定,因此,可以根据需要设定模拟电压数据集中模拟电压的个数和相差的维度,如矢量电机在空载状态下对应的模拟电压数据集可以至少包括10个不同的模拟输入电压一,10个不同的模拟输入电压一呈线性递增分布,这里,空载状态下的电阻值和电感值计算完成后,可以取均值,以消除系统误差,保证数据的稳定性。
21.需要指出的是,由于矢量电机的负载情况较为繁多,因此,需要为该种状态下分配较多的模拟输入电压,同样的,为了保证测得的数据的稳定性和准确性,矢量电机在负载状态下对应的模拟电压数据集可以至少包括100个不同的模拟输入电压二, 100个不同的模拟输入电压二依据负载的量级随机划分,负载的量级为10级,每个负载量级下对应于10个随机划分的模拟输入电压二。
22.另外,对于过载情况,有的为短暂的良性过载,有的则为突发性的恶性过载,良性过载指的是矢量电机可接受的超出正常负载情况下的过载情况,此时,模拟输入电压数据集可以单独划分若干个数的模拟输入电压三,每个模拟输入电压施加在矢量电机上,均需计算其电阻值和电感值,对于这种情况,随机选取一个计算出的电阻值和电感值作为最终值均可;如果为突发性的恶性过载,此时也要记录每个模拟输入电压三下的电阻值和电感值,可以随机将其中一组电阻值和电感值作为最终值,也可人为筛选,以便判断矢量电机是否能在后续时间正常运行。比如,矢量电机在过载状态下的对应的模拟输入电压数据集可以至少包括10个不同的模拟输入电压三, 10个不同的模拟输入电压三随机分布。
23.具体而言,所述为各个状态下的矢量电机分配时间对应的时间节点,并将其与对应状态下的模拟输入电压数据集相对应,其中,所述时间节点的分配规则为:若矢量电机处于空载状态,则根据矢量电机在空载状态下模拟输入电压一的个数递增分配时间节点一,且每相邻的两个时间节点一间的差值均可以为10分钟;若矢量电机处于负载状态,则根据矢量电机在负载状态下的模拟输入电压二的个数随机分配与之相对应时间节点二,其中,任意两个时间节点二间的差值可以不小于20分钟;若矢量电机处于过载状态,则根据矢量电机在过载状态下模拟输入电压三的个数随机分配与之相对应的时间节点三,其中,任意两个时间节点三间的差值可以不小于30分
钟。
24.其中,时间阶段的分配规则,考虑的是矢量电机在各个状态下运行测试后,由于电阻温度的升高,其恢复至默认状态后能否持续有效运行,一般来说,空载状态下,所需时间较短,负载状态其次,过载状态时间最长。
25.实际应用时,一般来说,电流值可以为正弦电流值,并且,当计算出各个时间节点下不同模拟输入电压数据集下的正弦电流值后,计算正弦电流值的幅值衰减,然后再计算矢量电机在各个状态下的电阻值。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1