一种协助拍摄系统及其协助拍摄机器人的制作方法
[0001]
本实用新型涉及一种智能机器人,具体是一种协助拍摄系统及其协助拍摄机器人。
背景技术:
[0002]
现时网络视频开始普及化,拍摄制作短片除为了消闲娱乐外,更成为了部分人群的职业(包括近期新兴的网络主播、网络带货等职业)。在智能手机普及应用的今天,拍摄制作短片等操作已经不需要专业的拍摄团队,通过对智能手机的应用即可完成短片的拍摄和后期处理,并可直接上传到网络上分享;实际拍摄过程中,很多时候都需要用户独自完成短片的拍摄,对于一些高端用户,他们为了获得高质量的拍摄效果往往需要配备大量相关拍摄器具,如:补光灯、避震云台,自拍伸缩杆等,不同的功能需要由不同的拍摄器具实现;实际使用中,同时控制大量拍摄器具具有一定难度,对于简单的定点拍摄,一个人尚且可以勉强应付完成,但对于不定点(需要随意走动)拍摄,且拍摄过程中双手不能同时腾空操作拍摄器具,此时就需要第三方协助拍摄,所以现有的拍摄方式难以实现单独行走拍摄,而且拍摄过程中,往往需要用户迁就拍摄角度,导致限制了用户的发挥。可见,市场对于能够独自操控、便于自我拍摄的系统需求增大。
技术实现要素:
[0003]
本实用新型的目的在于克服上述现有技术存在的不足,而提供一种协助拍摄系统及其协助拍摄机器人,本系统将补光、跟焦、跟随和行走等功能整合一起,从而达到协助拍摄的目的,以便用户轻松完成拍摄,且拍摄质量好。
[0004]
本实用新型的目的是这样实现的:
[0005]
一种协助拍摄系统,其特征在于:包括:
[0006]
中央控制模块,用于负责中央控制及数据计算;中央控制模块上装载有一种以上网络交互平台;
[0007]
摄影拍摄模块,用于获取图像信息以制作视频短片和/或图片,用户通过手势和/或按键方式向中央控制模块输入相应指令以控制摄影拍摄模块;
[0008]
跟随拍摄模块,用于获取用户的行走信息以便中央控制模块根据所述行走信息控制机器人跟随行走;
[0009]
补光控制模块,用于补偿拍摄所需的光,用户通过手势和/或按键方式向中央控制模块输入相应指令以控制补光控制模块;所述补光控制模块包括一块以上投光角度和/或光强度可调的补光灯板;
[0010]
自动行走小车,用于实现系统的自动行走;
[0011]
网络通讯模块,用于实现网络数据传输;
[0012]
所述摄影拍摄模块、跟随拍摄模块、补光控制模块、自动行走小车和网络通讯模块分别连接中央控制模块。
[0013]
本系统还包括用于向中央控制模块发送控制指令和接收中央控制模块反馈信息的遥控模块;所述遥控模块通过网络通讯模块与中央控制模块沟通互联;所述遥控模块包括平板电脑、智能手机、个人pc和遥控器。
[0014]
一种协助拍摄机器人,其特征在于:包括上述的协助拍摄系统、以及机器人壳体;所述中央控制模块和/或网络通讯模块设置于机器人壳体内腔;所述摄影拍摄模块和/或一块以上补光灯板设置于机器人壳体顶部;所述跟随拍摄模块设置于自动行走小车上;所述自动行走小车设置于机器人壳体底部。
[0015]
所述机器人壳体上设置有用于调整投光角度的投光调节机构;所述投光调节机构包括调节固定框架、以及用于上下调节投光角度的上下调节组件和用于翻转调节投光角度的翻转调节组件,上下调节组件设置于调节固定框架上,翻转调节组件设置于上下调节组件上,补光灯板设置于翻转调节组件上。
[0016]
所述上下调节组件包括第一调节电机、灯板支架、主动连杆和从动连杆;所述第一调节电机设置于调节固定框架上;所述主动连杆一端连接第一调节电机的电机轴且相对调节固定框架可转动、另一端转动连接灯板支架;所述从动连杆一端转动连接调节固定框架、另一端转动连接灯板支架;所述翻转调节组件设置于灯板支架上。
[0017]
所述上下调节组件还包括设置于调节固定框架上的第一限位开关和/或第二限位开关,第一限位开关和/或第二限位开关连接中央控制模块;当所述补光灯板下调至设定的极限位置时,灯板支架、主动连杆或从动连杆触碰第一限位开关;当所述补光灯板上调至设定的极限位置时,灯板支架、主动连杆或从动连杆触碰第二限位开关。
[0018]
所述翻转调节组件包括第二调节电机和翻转支架;所述第二调节电机设置于上下调节组件上;所述补光灯板设置于翻转支架上,并通过翻转支架连接第二调节电机的电机轴。
[0019]
所述翻转调节组件还包括设置于上下调节组件上的第三限位开关和/或第四限位开关,第三限位开关和/或第四限位开关连接中央控制模块;所述翻转支架上设置有随翻转支架转动的限位拨片;当所述补光灯板向左翻转至设定的极限位置时,限位拨片触碰第三限位开关;当所述补光灯板向右翻转至设定的极限位置时,限位拨片触碰第四限位开关。
[0020]
所述机器人壳体上设置有用于输入控制指令及显示相关信息的操控模块,操控模块连接中央控制模块。
[0021]
所述机器人壳体内腔设置有依次连接的供电模块、逆变器和充电模块,供电模块连接中央控制模块;所述机器人壳体上外露式设置有电量显示器和/或驱动开关和/或电源开关,所述电量显示器和/或驱动开关和/或电源开关连接中央控制模块。
[0022]
本实用新型的有益效果如下:
[0023]
本协助拍摄系统具有补光功能、跟焦功能、跟随功能、行走功能等,以便于用户独立的完成定点式或行走式自我拍摄;本系统可应用于网络主播、网络带货、网络演说、网络会议、网络教学等场合,特别适合人数较少的拍摄团队或单独一个人的拍摄,操控方便,拍摄效果好,节省很多后期制作以及剪接工作,而且由于用户双手得到解放,所以可以腾出双手做出相关手势/动作,使拍摄效果更加出众,特别是对于演说者和教学员;本机器人体积小,占用平面空间小,有利于进入狭窄的通道和空间,进而可适应不同的使用环境。其中,补光灯板的投光角度和/或光强度可调,以从不同角度进行补光照射和根据环境所需调节光
亮度,保证跟拍过程中获得最佳的补光效果,降低拍摄过程中环境光变化对拍摄效果造成的影响,保证拍摄效果;跟焦和跟随功能分别通过相应的摄像头实现,通过采集用户的位置信息实现跟焦和跟随,确保设定的人体部位和/或物件保持在片屏幕固定位置显示,且可确保机器人准确的跟随用户行走;行走功能则由机器人底部的agv小车实现,系统根据指令控制agv小车,进而达到行走的目的。
附图说明
[0024]
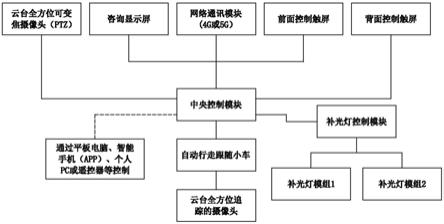
图1为本实用新型一实施例中协助拍摄系统的架构图。
[0025]
图2为本实用新型一实施例中补光灯板的工作模式参数表格。
[0026]
图3为本实用新型一实施例中协助拍摄机器人的爆炸图。
[0027]
图4为本实用新型一实施例中协助拍摄机器人的主视图。
[0028]
图5为本实用新型一实施例中协助拍摄机器人的左视图。
[0029]
图6为本实用新型一实施例中补光灯板与投光调节机构组合的主视图。
[0030]
图7为本实用新型一实施例中补光灯板与投光调节机构组合的左视图。
[0031]
图8为图6中h-h方向的剖视图。
[0032]
图9为图6中j-j方向的剖视图。
[0033]
图10为图6中k-k方向的剖视图。
具体实施方式
[0034]
下面结合附图及实施例对本实用新型作进一步描述。
[0035]
参见图1和图2,本协助拍摄系统,包括:
[0036]
中央控制模块,用于负责中央控制及数据计算;本实施例涉及的中央控制模块为负责中央控制和数据计算的台式电脑,中央控制模块上装载有一种以上网络交互平台,包括微信、qq、腾讯会议以及zoom会议等交流软件;
[0037]
摄影拍摄模块12,用于获取图像信息以制作视频短片和图片,用户通过手势和/或按键方式向中央控制模块输入相应指令以控制摄影拍摄模块12,,包括控制摄影拍摄模块12的拍摄角度和变焦等;本实施例涉及的摄影拍摄模块12为云台全方位可变焦摄像头(ptz),其具有全方位移动(镜头移动以调节拍摄角度)和变焦功能;此外还具有人脸锁定自动跟焦功能,用户可根据所需锁定拍摄对象在拍摄画面中的某个位置,系统根据拍摄到的画面进行影像分析,分析锁定拍摄对象的人脸特征(如:五官、大小、角度等),以调节摄影拍摄模块12的拍摄位置和角度,从而锁定拍摄对象在拍摄画面中预设的位置;当然,拍摄对象也可以是物件或其他生物等;实际应用过程中,当需要锁定目标拍摄对象时,系统对画面中出现的拍摄对象进行标记,指示用户选择锁定的拍摄对象并设定要锁定的位置,然后系统把拍摄对象相应的辨识数据对摄影拍摄模块12进行调节,把拍摄对象置于画面中设定的锁定位置,同时系统也会自动调节焦点,把拍摄对象清晰化;
[0038]
跟随拍摄模块2,用于获取用户的行走信息以便中央控制模块根据行走信息控制机器人跟随行走;实际应用过程中,跟随拍摄模块2根据拍摄的画面分析跟踪人物在画面中的大小和方位,以确定跟踪人物与跟随拍摄模块2之间的距离和方位,以便中央控制模块对自动行走小车发出相应的调节行动指令;
[0039]
补光控制模块,用于补偿拍摄所需的光,用户通过手势和/或按键方式向中央控制模块输入相应指令以控制补光控制模块,包括控制补光控制模块的补光角度和灯光强弱等;本实施例涉及的补光控制模块包括光强度可调的两块补光灯板22和一块中心灯板5;其中两块补光灯板22的投光角度可调,可调模式包括上下升降调节、左右伸展调节和内外翻转调节等,可从不同角度进行补光照射,确保拍摄对象获得所需的光补偿,有效保证拍摄质量;此外,补光灯板22和中心灯板5的光强度可调,且可通过控制键或手势/动作进行调节,这就需要摄影拍摄模块12具有手势/动作识别功能,用户可利用设定的手势或动作等调节补光灯板22的补光角度和灯光强弱;实际应用过程中,可通过软件、app等记录手势(动作)触发,当进入触发记录模式时,系统会指示用户做出相应的触发手势(动作),通过摄影拍摄模块12拍摄并数据化分析该手势(动作),以作为设定模式所用,每种模式的相关数据可由人手输入,也可在系统的资料显示画面中调整视觉效果后储存,系统便会生成相应的数据;另外,若拍摄对象(用户脸部或物件)已被摄影拍摄模块12锁定和跟焦,那么拍摄对象的光暗对比可由系统即时计算,如果计算结果显示对比度过低,系统便会对补光灯板22的投光角度和光强度进行调节,以便实时补光反馈;
[0040]
自动行走小车1,用于实现系统的自动行走;此外非自动行走状态下,用户也可以通过手势和/或按键方式向中央控制模块输入相应指令以控制自动行走小车1;自动行走小车1可以是agv小车,其设置有光学雷达(lider),以避开障碍物;在非跟随模式下主要有以下行走模式:
①
设定一个以上定点,中央控制模块控制自动行走小车1按设定的时间/速度/顺序行走至相应的定点上,
②
在路面上沿行走路线贴上显著的标识块(如:具有可辨识颜色的贴纸),中央控制模块控制自动行走小车1按设定的时间/速度沿行走路线行走;在跟随模式下,跟随拍摄模块2会时刻追踪被摄影的对象,系统根据摄影的数据分析判断自动行走小车1与拍摄对象的距离,从而计算出自动行走小车1行走的路线和速度,以有效的跟随着拍摄对象;
[0041]
网络通讯模块,用于实现网络数据传输;
[0042]
遥控模块,用于向中央控制模块发送控制指令和接收中央控制模块反馈信息;遥控模块通过网络通讯模块与中央控制模块沟通互联;遥控模块包括平板电脑、智能手机、个人pc和遥控器等;用户通过遥控模块可控制本协助拍摄系统,以便在拍摄期间作出即时的更新调节;
[0043]
摄影拍摄模块12、跟随拍摄模块2、补光控制模块、自动行走小车1和网络通讯模块分别连接中央控制模块。
[0044]
参见图3-图10,本实施例涉及的协助拍摄机器人,包括上述的协助拍摄系统、以及机器人壳体;中央控制模块和网络通讯模块分别设置于机器人壳体内腔;摄影拍摄模块12和两块补光灯板22分别设置于机器人壳体顶部;跟随拍摄模块2设置于自动行走小车1前端;自动行走小车1设置于机器人壳体底部。具体地,机器人壳体包括支撑箱前盖6、支撑箱后盖15、控制箱后盖16和控制箱前盖21;支撑箱前盖6与支撑箱后盖15相互组装形成支撑箱;控制箱前盖21与控制箱后盖16相互组装形成控制箱;摄影拍摄模块12通过第一固定支架11固定设置于支撑箱顶部,支撑箱固定设置于控制箱顶部,支撑箱前侧设置有中心灯板5,自动行走小车1设置于控制箱底部。
[0045]
进一步地,机器人壳体上设置有用于调整投光角度的投光调节机构10,两块补光
灯板22设置于投光调节机构10上,投光调节机构10设置于支撑箱上;投光调节机构10包括调节固定框架、以及用于上下调节投光角度的上下调节组件和用于翻转调节投光角度的翻转调节组件,由上下调节组件与翻转调节组件组成的调节关节设置两套,每套调节关节上设置有一补光灯板22;其中,上下调节组件设置于调节固定框架上,翻转调节组件设置于上下调节组件上,补光灯板22设置于翻转调节组件上。具体地,调节固定框架整体影藏式设置于支撑箱内腔,其由四根连杆支架1001、前固定座1008和后固定座1009组成,两根连杆支架1001连接前固定座1008,两根连杆支架1001连接后固定座1009,前固定座1008与后固定座1009之间有间隙,调节固定框架通过连杆支架1001固定连接控制箱顶部。
[0046]
进一步地,上下调节组件包括第一调节电机1006、灯板支架1004、主动连杆1003和从动连杆1002;第一调节电机1006固定设置于调节固定框架中的后固定座1009后侧;主动连杆1003一端通过主动连杆轴1017连接第一调节电机1006的电机轴且相对调节固定框架可转动、另一端通过主动短轴1019转动连接灯板支架1004;从动连杆1002一端通过从动连杆轴1011转动连接调节固定框架、另一端通过从动短轴1018转动连接灯板支架1004;翻转调节组件设置于灯板支架1004上。具体地,主动连杆轴1017和从动连杆轴1011分别可转动的设置于前固定座1008和后固定座1009之间,主动连杆轴1017两端和从动连杆轴1011两端分别通过轴承1012转动连接相应的固定座。
[0047]
进一步地,上下调节组件还包括设置于调节固定框架上的第一限位开关1010和第二限位开关1015,第一限位开关1010和第二限位开关1015分别连接中央控制模块;当补光灯板22下调至设定的极限位置时,从动连杆1002触碰第一限位开关1010,中央控制系统控制第一调节电机1006停机;当补光灯板22上调至设定的极限位置时,主动连杆1003触碰第二限位开关1015,中央控制系统控制第一调节电机1006停机。通过设置限位开关,使系统可控制上下调节组件在极限位置停止运作。
[0048]
进一步地,翻转调节组件包括第二调节电机1020和翻转支架1021;第二调节电机1020固定设置于上下调节组件中的灯板支架1004上;补光灯板22固定设置于翻转支架1021上,并通过翻转支架1021连接第二调节电机1020的电机轴;第二调节电机1020工作时通过灯板支架1004驱动补光灯板22翻转。
[0049]
进一步地,翻转调节组件还包括设置于上下调节组件上的第三限位开关1022和第四限位开关1023,第三限位开关1022和第四限位开关1023分别连接中央控制模块;翻转支架1021上设置有随翻转支架1021转动的限位拨片1024,第三限位开关1022和第四限位开关1023分别位于限位拨片1024两侧;当补光灯板22向左翻转至设定的极限位置时,限位拨片1024触碰第三限位开关1022;当补光灯板22向右翻转至设定的极限位置时,限位拨片1024触碰第四限位开关1023。通过设置限位开关,使系统可控制翻转调节组件在极限位置停止运作。
[0050]
进一步地,机器人壳体上设置有用于输入控制指令及显示相关信息的操控模块,操控模块连接中央控制模块,操控模块可显示相关软件、app等,操作方便。具体地,操控模块为触屏式控制屏,本实施例涉及的操控模块包括设置于支撑箱前侧的前操控模块3和设置于支撑箱后侧的后操控模块13;前操控模块3可方便单独操作时用户可进行自我拍摄控制,后操控模块13可方便其他人在机器人后侧主导及帮助操作。其中,前操控模块3通过第二固定支架4固定安装,后操控模块13通过第三固定支架14固定安装。
[0051]
进一步地,机器人壳体内腔设置有依次连接的供电模块17、逆变器20和充电模块18,供电模块17连接中央控制模块,供电模块17、逆变器20和充电模块18分别设置于控制箱内腔,供电模块17和充电模块18分别通过第四固定支架19固定安装于逆变器20上方;机器人壳体上外露式设置有电量显示器7、驱动开关8和电源开关9,电量显示器7、驱动开关8和电源开关9连接中央控制模块。
[0052]
上述为本实用新型的优选方案,显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本领域的技术人员应该了解本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1