一种浆果类植物果实采收作业机械的柔性振动机构的制作方法
[0001]
本发明涉及一种浆果采收作业的机械结构,特别是一种适用于蓝莓、枸杞等浆果类植物果实采收作业机械的柔性振动机构。可根据植物的高度进行上下调节,然后再通过机械手对其浆果进行柔性振动式采收作业。
背景技术:
[0002]
蓝莓、枸杞等浆果类植物果实采收作业是一种工作量大、劳动强度大的工作,机械化采收迫在眉睫。对于蓝莓的收获,目前虽然根据劳动工艺的需要,国内使用最多的是手持便携式蓝莓采摘装备,这种设备的缺点是效率低,易破坏蓝莓果粉。国外使用最多的是凸轮机构式蓝莓采摘设备,其机器均存在结构复杂、产量损失大、前期投资较大等缺点。
[0003]
所述的手持便携式蓝莓采摘装备(专利号2019110568273),是用摆动电机直接连接摆动机构,带动采摘头旋转,以摇晃植物枝杆,使浆果脱落,从而实现浆果的收获。但该机构电池续航短,且当电机工作时,电机振动大,工作人员需要一直抓紧采摘设备,易使工作人员疲劳,大大降低采收效率。
[0004]
所述的凸轮机构式蓝莓采摘设备(专利号2018116028077),虽然解决了采收效率的问题,但仍存在很大的设计缺陷:一是,采收部分是大型梳齿状圆筒状结构,体积巨大且笨重,底盘与梳齿状圆筒相连接,底盘下方为电机,电机与凸轮机构直接连接;当设备工作时,电机带动凸轮机构,实现底盘与梳齿状圆筒上下反复运动。因为底盘和梳齿装圆筒体积巨大,重量相对较大,所以电机需要提供的扭矩则要大,因此提供底盘上下运动的电机的功率也要挑选大功率的,大大提高了成本。
[0005]
二是,凸轮机构式蓝莓采摘设备采用的振动方式是上下反复振动,但是上下振动的采摘方式容易损坏蓝莓树的植物根茎,且上下振动时植物树枝会给设备带来较大的阻力,一旦设备长时间工作,会导致电机负载过大,发热过快,使电机容易损坏;且上下反复振动会影响蓝莓的完整性,上下振动会给蓝莓下落时提供加速度,与采收器接触时,很大几率会导致浆果破损,经大数据验证,此设备比人工采收大约损失30%的产量。
技术实现要素:
[0006]
本发明所要解决的技术难题是,克服现有技术存在的问题,提供一种浆果类植物果实采收作业机械的柔性振动机构,通过上下移动和水平小幅高频振动相叠加的运动模式,使机械手获得小幅柔性振动,实现桨果类果实的最小受损采收方式。
[0007]
本发明的技术解决方案是,包括电机5、一级齿轮箱3、二级齿轮箱11和机械手振动盘总成13,一级齿轮箱3与二级齿轮箱11之间通过伸缩器柔性联接,二级齿轮箱11和机械手振动盘总成13之间通过连杆机构联接,一级齿轮箱3固定在机架1上,二级齿轮箱11为可移动式的活动箱体;机架1上设有立式轨道8和气缸9,在气缸9的推动下,二级齿轮箱11通过箱体外侧的滑块10在立式轨道8上上下移动;机械手振动盘总成13挂接在二级齿轮箱11的外
侧,可随二级齿轮箱11一起上下移动;电机5通过一级齿轮箱3和二级齿轮箱11减速后,再由连杆机构推动机械手振动盘总成13进行高频小幅振动;机械手振动盘总成13既拥有来自于气缸9的上下滑移运动又拥有来自于电机5的水平小幅高频震动的两种运动形式。
[0008]
所述的一级齿轮箱3的箱体内设有输入轴2、一级齿轮传动副21和传动轴20,二级齿轮箱11的箱体内设有过渡轴19、二级齿轮传动副18和输出轴17,传动轴20与过渡轴19之间通过伸缩器相联接。
[0009]
所述机械手振动盘总成13由旋转轴28、旋转套24、安装法兰和振动盘30构成,振动盘30上设有振动棘爪31,振动盘30与旋转轴28焊接固定,旋转套24与旋转轴28花键连接;安装法兰由上法兰23、下法兰26和螺栓29连接成整体,并通过螺钉22固定在二级齿轮箱11外侧的悬挂板12上;旋转轴28通过旋转套24、端面轴承25、悬挂板12、锁紧螺母27以及上下法兰23、26进行轴向固定,并将整体的机械手振动盘总成13悬挂在二级齿轮箱11外侧的悬挂板12上。
[0010]
所述的伸缩器由伸缩器滑杆6和伸缩器滑套7构成,伸缩器滑杆6为六方形杆体,伸缩器滑套7六方形孔套,伸缩器滑杆6既可在六方形伸缩器滑套7内轴向滑动,也可带动伸缩器滑套7旋转。
[0011]
所述连杆机构由凸轮推杆16、连杆15和摆杆14构成,连杆15的两端与凸轮推杆16和摆杆14之间活动式相联接;凸轮推杆16与二级齿轮箱11中的输出轴17焊接式固定联接,摆杆14与机械手振动盘总成13中的旋转套24焊接式固定联接;输出轴17带动凸轮推杆16旋转,再通过连杆15带动摆杆14和旋转套24进行小幅摆动,从而带动机械手振动盘总成13进行小幅高频摆动式震动。
[0012]
本发明与现有技术相对比所具备的优点:一是采用两级减速传动,大大降低了速比,减小了伞齿模数,降低了生产成本;二是传动箱采用一个固定、一个可移动的设计方式,使振动盘可根据蓝莓树丛的高度,自行调节作业高度,实现精准收获;三是振动盘总成运动模式为上下运动和水平振动相叠加,对植物进行小幅柔性振动,使蓝莓果实自行掉落,实现机械化采摘收获;四是改变了以往大型圆筒梳齿装结构,大大减少了动力损耗;可选小功率电机,降低成本,并且旋转式小幅振动可大大降低蓝莓采收的损失率。
附图说明
[0013]
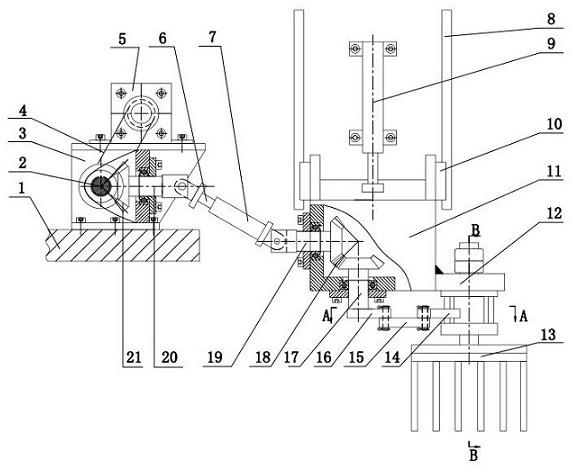
图1为本发明的结构示意图;图2为图1的a-a剖视图;图3为图1的b-b剖视图。
[0014]
图中标号:1-机架,2-输入轴,3-一级齿轮箱,4-皮带,5-电机,6-伸缩器滑杆,7-伸缩器滑套,8-立式轨道,9-汽缸,10-滑块,11-二级齿轮箱,12-悬挂板,13-机械手振动盘总成,14-摆杆,15-连杆,16-凸轮推杆,17输出轴,18-二级齿轮传动副,19-过渡轴,20-传动轴,21-一级齿轮传动副,22-螺钉,23-上法兰,24-旋转套,25-端面轴承,26-下法兰, 27-锁紧螺母,28-旋转轴,29-螺栓,30-振动盘,31-振动棘爪。
具体实施方式
[0015]
下面组合附图对本发明实施例作进一步描述。
[0016]
本发明包括电机5、一级齿轮箱3、二级齿轮箱11和机械手振动盘总成13,一级齿轮箱3与二级齿轮箱11之间通过伸缩器柔性联接,二级齿轮箱11和机械手振动盘总成13间通过连杆机构联接,一级齿轮箱3固定在机架1上,二级齿轮箱11为可移动式的活动箱体。
[0017]
机架1上设有立式轨道8和气缸9,二级齿轮箱11的箱体两边外侧上设有可在立式轨道8上滑动的滑块10。气缸9的座体固定在机架1上,气缸9的缸杆与二级齿轮箱11的箱体上侧相联接。在气缸9的推动下,二级齿轮箱11通过滑块10可在立式轨道8上进行上下滑移式运动。
[0018]
二级齿轮箱11的外侧下端焊接有一个用于挂接机械手振动盘总成13的悬挂板12,机械手振动盘总成13随二级齿轮箱11一起做上下移动滑行。
[0019]
所述的一级齿轮箱3的箱体内设有输入轴2、一级齿轮传动副21和传动轴20,二级齿轮箱11的箱体内设有过渡轴19、二级齿轮传动副18和输出轴17,传动轴20与过渡轴19之间通过伸缩器相联接。二级齿轮箱11为下端输出,即其输出轴17设于二级齿轮箱11的下端。
[0020]
电机5通过皮带4将动力传递给一级齿轮箱3和二级齿轮箱11,由一级齿轮传动副21和二级齿轮传动副18两次减速后,再由连杆机构推动机械手振动盘总成13进行高频小幅振动。
[0021]
所述的机械手振动盘总成13由旋转轴28、旋转套24、安装法兰和振动盘30构成。旋转套24套设于旋转轴28上,且与旋转轴28花键连接。安装法兰由上法兰23、下法兰26和螺栓29构成整体式法兰架,并通过螺钉22固定在二级齿轮箱11外侧的悬挂板12上。上法兰23和下法兰26内均安装有端面轴承25,旋转套24置于上法兰23和下法兰26之间,旋转套24便可以在上法兰23和下法兰26中间旋转;旋转轴28通过旋转套24、端面轴承25、悬挂板12、锁紧螺母27以及上下法兰23、26进行轴向固定,并将整体的机械手振动盘总成13悬挂在二级齿轮箱11外侧的悬挂板12上。振动盘30焊接在旋转轴28的轴端,振动盘30上设有振动棘爪31。所述的振动棘爪31由柔性材料制成,其棘爪可伸入植物枝杆中,对植物枝杆进行振动摇晃。旋转套24上焊接有摆杆14,摆杆14通过连杆机构与输出轴17相联接,从而为机械手振动盘总成13提供高频小幅振动的动力。
[0022]
所述的伸缩器由伸缩器滑杆6和伸缩器滑套7构成,伸缩器滑杆6为六方形杆体,伸缩器滑套7六方形孔套,伸缩器滑杆6既可在六方形伸缩器滑套7内轴向滑动,也可带动伸缩器滑套7旋转。
[0023]
所述连杆机构设于二级齿轮箱11的下端,由凸轮推杆16、连杆15和摆杆14构成。连杆15的两端与凸轮推杆16和摆杆14之间活动链接;凸轮推杆16与二级齿轮箱11中的输出轴17焊接式固定联接,摆杆14与机械手振动盘总成13中的旋转套24焊接式固定联接。输出轴17带动凸轮推杆16旋转,再通过连杆15带动摆杆14摆动,然后再推动旋转套24进行小幅摆动,再由旋转套24带动旋转轴28转动,从而带动机械手振动盘总成13实现小幅高频摆动式震动。
[0024]
本发明机械手振动盘总成13最终实现两种运动:一是来自于气缸9的上下滑移运动,二是来自于电机5的小幅高频摆动而形成的震动。
[0025]
本发明适用于对蓝莓、枸杞等浆果类植物进行跨行收获的机械。工作时,将收获机
械行驶到需要收获的植物上方,停稳后,先将机械手振动盘总成13进行下行移动,找到合适的高度位置,使振动棘爪31伸入到植物的枝干中去,然后再启动电机1,使振动棘爪31进行小幅高频震动,从而使果实掉落在下方的收集底盘上,从而实现浆果的收获。一个点震动收获完毕后,再收起机械手振动盘总成13,将整机移行到下一个点,再进行下一个点的震动收获工作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1