一种智能沙漠植树机器人
1.本实用新型涉及机器人技术领域,尤其涉及一种智能沙漠植树机器人。
背景技术:
2.荒漠化和沙化是全球面临的重大生态问题,应对该问题主要采取的措施是把部分已经沙漠化的耕地退还为林地。
3.目前国内外关于沙漠植树的相关方式主要分为四种,第一种是最为普遍的人工植树,但树苗的储存与运输、挖土、栽苗、培养都消耗了大量人力且作业效率低、劳动强度大、并且作业质量无法保证。其次是半机械化种植,就是机械化开沟,然后人工放条,但是机械的开沟宽度为1米左右,对原有土壤植被破坏比较严重。第三种是机械扦插种植,即以链轨拖拉机牵引液压植苗机进行造林,开沟、栽植、覆土、镇压一次完成,效率高,省劳力,但花费较高且不宜在水分差的沙丘上作业。第四种是目前国内外正在研发的模块化植树机器人,但该模块化机器人在现阶段仍存在沙漠栽植成本较高、操作模块繁杂、稳定性不高、缺少浇水装置、底盘设计难以适应沙漠复杂地形等等问题尚未解决。
4.因此,实用新型一种智能沙漠植树机器人来解决上述问题很有必要,其能够实现在沙漠中的植树,植树效果好,效率高,成本低。国家级大学生创新创业训练计划资助s202010497194。
技术实现要素:
5.有鉴于此,本实用新型提供一种智能沙漠植树机器人解决现有植树机器人难以适应沙漠复杂地形的问题。
6.为了达到上述目的,本实用新型解决技术问题的技术方案是提供一种智能沙漠植树机器人,包括:行走机构、基座、装载箱、挡罩及种植机构,所述行走机构包括行走驱动件及行走履带轮,所述行走履带轮连接于所述行走驱动件的两侧;所述基座包括水平部、垂直部及拨杆,所述垂直部连接于所述水平部的一端,所述水平部连接于所述行走驱动件上,且所述水平部上开设有连接槽,所述垂直部上开设有插条孔及冲压槽,所述插条孔贯穿所述垂直部,并分别与所述连接槽及所述冲压槽连通;所述拨杆位于所述连接槽内,且其靠近所述垂直部的一端与所述连接槽的内壁转动连接;所述装载箱包括箱体及分枝件,所述箱体连接于所述水平部上,为内部中空的腔体,其一面侧壁上开设有贯穿所述箱体的分枝槽;所述分枝件位于所述分枝槽内,且与所述箱体的内壁转动连接;所述挡罩为内部中空的腔体,位于所述连接槽内并覆盖所述拨杆,其上开设有进料槽,且所述进料槽与所述分枝槽重合;所述种植机构包括种植驱动件、冲压杆及水管,所述种植驱动件、所述冲压杆及所述水管皆位于所述冲压槽内,所述种植驱动件连接于所述冲压槽的内壁上;所述水管的一端连接于所述冲压槽的内壁上并与外部水源连通,其远离所述冲压槽的一端穿过所述插条孔外露于所述基座;所述冲压杆的一端也穿过所述插条孔外露于所述基座,且其与所述垂直部滑动连接,并与所述种植驱动件连接,以在所述种植驱动件的驱动下沿所述插条孔的轴线方向
往复运动。
7.进一步,所述冲压杆上设置有u形卡块,所述种植驱动件包括齿轮箱、驱动齿轮、从动齿轮、卡接板及从动齿轮,所述驱动齿轮及所述从动齿轮皆设置于所述齿轮箱内,且所述驱动齿轮与所述从动齿轮啮合;所述卡接板设置于所述齿轮箱的外壁上,且朝靠近所述冲压杆的方向延伸,所述u形卡块与所述卡接板卡接;所述冲压槽内还设置有齿条,所述从动齿轮外露于所述齿轮箱并与所述齿条啮合,以在通过所述驱动齿轮带动所述从动齿轮转动,从而使所述从动齿轮与所述齿条之间通过啮合形成传动,进而利用所述卡接板带动所述u形卡块一同运动,从而实现所述种植驱动件带动所述冲压杆的运动。
8.进一步,所述齿轮箱内设置有带动所述驱动齿轮的电机,以给所述驱动电机提供原动力。
9.进一步,所述基座上还设置有冲压转动电机,所述冲压转动电机的输出轴与所述冲压杆连接,以带动所述冲压杆转动,从而使得所述u行卡块与所述卡接板卡接或脱离卡接。
10.进一步,所述水平部上开设有滑动槽,所述箱体上设置有滑动凸台,所述滑动凸台与所述滑动槽滑动配合。
11.进一步,所述滑动凸台呈t形。
12.进一步,所述水管靠近所述地面的一端上设置有环形冲沙块,所述环形冲沙块与所述水管连通。
13.进一步,所述环形冲沙块靠近地面的一面上设置有水枪,所述水枪通过所述环形冲沙块与所述水管连通。
14.进一步,所述箱体包括插条放置区域及插条整理区域,所述插条放置区域的内壁呈斜面,且与所述插条整理区域连通;所述插条整理区域内设置有整理组件,所述分枝槽开设于所述整理区域的侧壁上,以利用所述整理组件将待栽植的插条进行整理,使其从所述分枝槽处落出。
15.进一步,所述整理组件包括传输带及多个夹板,多个所述夹板等间距的连接于所述传输带上,以在待栽植的插条从所述插条放置区域落至所述整理组件上时,刚好卡接于两个所述夹板之间,以利用多个所述夹板连接的将待栽植的插条运输至所述分枝槽处。
16.与现有技术相比,本实用新型所提供的智能沙漠植树机器人具有以下有益效果:
17.通过行走机构、基座、装载箱、挡罩及种植机构的相互配合,即利用行走机构提供移动功能,基座提供支撑功能,装载箱内装载待栽植的插条,并与挡罩及种植机构配合将插条进行栽植,能够实现在沙漠中的植树,植树效果好,效率高,成本低。
附图说明
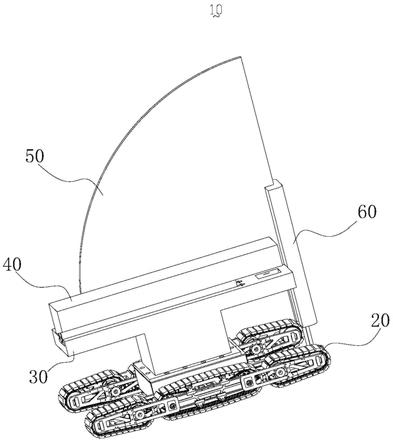
18.图1为本实用新型第一实施例提供的一种智能沙漠植树机器人的结构示意图;
19.图2为图1中行走机构的结构示意图;
20.图3为图1中基座的结构示意图;
21.图4为图1中装载箱的结构示意图;
22.图5为图1中挡罩的结构示意图;
23.图6为图1中种植机构的结构示意图;
24.图7为图6中a处的局部放大图;
25.图8为图6中种植驱动件的剖面结构示意图;
26.图9为图4中整理组件的机构示意图;
27.附图标记说明:10、智能沙漠植树机器人;20、行走机构;30、基座;40、装载箱;50、挡罩;60、种植机构;21、行走驱动件;22、行走履带轮;31、水平部;32、垂直部;33、拨杆;311、连接槽;312、滑动槽;321、插条孔;322、冲压槽;41、箱体;42、分枝件;411、分枝槽;412、滑动凸台;51、进料槽;61、种植驱动件;62、冲压杆;621、u形卡块;63、水管;631、环形冲沙块;632、水枪;611、齿轮箱;612、驱动齿轮;613、卡接板;614、从动齿轮;412、插条放置区域;413、插条整理区域;43、整理组件;431、传输带;432、夹板。
具体实施方式
28.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
29.请参阅图1
‑
9,本实用新型提供的一种智能沙漠植树机器人10,其包括行走机构20、基座30、装载箱40、挡罩50及种植机构60,基座30连接于行走机构20上,装载箱40、挡罩50及种植机构60皆连接于基座30上,以通过行走机构20带动基座30、装载箱40、挡罩50及种植机构60移动。其中,带栽植的插条位于装载箱40内,当需要种植时,将装载箱40内的插条传输至种植机构60内,由种植机构60进行种植及浇水灌溉。
30.具体的,行走机构20包括行走驱动件21及行走履带轮22,行走履带轮22连接于行走驱动件21的两侧,以通过行走驱动件21驱动行走履带轮22,从而实现在地面上的移动。
31.可以理解,行走驱动件21可是电机,行走履带轮22可以履带包裹的滚轮,电机的输出轴与滚轮连接,从而实现对行走履带轮22的驱动。
32.基座30包括水平部31、垂直部32及拨杆33,垂直部32连接于水平部31的一端,水平部31连接于行走驱动件21上。水平部31上开设有连接槽311,垂直部32上开设有插条孔321及冲压槽322,其中,插条孔321贯穿垂直部32,且分别与连接槽311及冲压槽322连通。拨杆33位于连接槽311内,且其靠近垂直部32的一端与连接槽311的内壁转动连接。
33.装载箱40包括箱体41及分枝件42,箱体41连接于水平部31上,为内部中空的腔体,其一面侧壁上开设有贯穿箱体41的分枝槽411。分枝件42位于分枝槽411内,且与箱体41的内壁转动连接,以通过分枝件42相对箱体41的转动,将箱体41内的待栽植的插条翻转出箱体41。
34.可以理解,待栽植的插条为植物幼苗,放置于箱体41内,分枝件42为半圆柱形的壳体,即其具有一侧开口,当分枝件42的开口朝向箱体41内部时,可将插条从开口处放入分枝件42内,从而在分枝件42相对箱体41转动至开口远离箱体41时,将插条从箱体41内带出。
35.挡罩50为内部中空的腔体,位于连接槽311内并覆盖拨杆33,其上开设有进料槽51,且进料槽51与分枝槽411重合,以在分枝件42将插条从箱体41内转出时,插条刚好从进料槽51进入挡罩50内。
36.可以理解,当插条进入挡罩50内后,通过将拨杆33从平行于水平面的方向转动至垂直于水平面的方向,可将插条拨动至插条孔321内,从而使插条从插条孔321处以垂直于
水平面的方向落出基座30。
37.种植机构60包括种植驱动件61、冲压杆62及水管63,种植驱动件61、冲压杆62及水管63皆位于冲压槽322内,其中,种植驱动件61连接于冲压槽322的内壁上。水管63的一端连接于冲压槽322的内壁上并与外部水源连通,且其远离冲压槽322的一端穿过插条孔321外露于基座30。冲压杆62的一端也穿过插条孔321外露于基座30,且其与垂直部32滑动连接,并与种植驱动件61连接,以在种植驱动件61的驱动下沿插条孔321的轴线方向往复运动,从而利用冲压杆62对地面进行冲压,便于待栽植的插条被拨杆33拨动落出基座30后,直接进入冲压杆62冲压地面形成的孔中,然后再由水管63进行喷水,完成栽植。
38.可以理解,冲压杆62可以通过设置滑槽、弹簧等任意方式实现与垂直部32的滑动连接,只要在种植驱动件61的带动下,能够在冲压槽322及插条孔321中滑动,以对地面进行冲压即可。
39.进一步的,冲压杆62上设置有u形卡块621,种植驱动件61包括齿轮箱611、驱动齿轮612、卡接板613及从动齿轮614,驱动齿轮612及从动齿轮614皆设置于齿轮箱611内,且驱动齿轮612与从动齿轮614啮合,卡接板613设置于齿轮箱611外壁上,且朝靠近冲压杆62的方向延伸,u形卡块621与卡接板613卡接。冲压槽322内还设置有齿条(图未视),从动齿轮614外露于齿轮箱611并与齿条啮合,以在通过驱动齿轮612带动从动齿轮614转动,从而使从动齿轮614与齿条之间通过啮合形成传动,进而利用卡接板613带动u形卡块621一同运动,从而实现种植驱动件61带动冲压杆62运动。
40.可以理解,齿轮箱611内设置有带动驱动齿轮612转动的电机,以给驱动齿轮612提供原动力。
41.进一步的,基座30上还设置有冲压转动电机(图未视),冲压转动电机的输出轴与冲压杆62连接,以带动冲压杆62转动,从而使得u形卡块与卡接板613卡接或脱离卡接。
42.进一步的,水平部31上还开设有滑动槽312,箱体41上设置有滑动凸台412,滑动凸台412与滑动槽312滑动配合,以实现箱体41与水平部31的连接,且通过设置滑动凸台412与滑动槽312,可便于拆卸箱体41。
43.进一步的,滑动凸台412呈t形,以增加滑动凸台412与滑动槽312滑动的稳定性。
44.进一步的,水管63靠近地面的一端上设置有环形冲沙块631,环形冲沙块631与水管63连通,以将外部水源进行喷洒。
45.进一步的,环形冲沙块631靠近地面的一面上设置有水枪632,水枪632通过环形冲沙块631与水管63连通,以在喷水时增加水流的压力。
46.进一步的,箱体41包括插条放置区域412及插条整理区域413,插条放置区域412处的内壁呈斜面,且与插条整理区域413连通,插条整理区域413内还设置有整理组件43,待栽植的插条初始位于插条放置区域412,并通过斜面滚落入插条整理区域413内的整理组件43上,分枝槽411开设于插条整理区域413的侧壁上,以利用整理组件43将箱体41内的待栽植的插条进行整理,使其按照顺序从箱体41上的分枝槽411处落出。
47.进一步的,整理组件43包括整理传输带431及夹板432,夹板432等间距的连接于传输带431上,以在待栽植的插条从插条放置区域412落至整理组件43上时,刚好卡接于两个夹板432,从而利用多个夹板432连续的将待栽植的插条运输至分枝槽411处。
48.本实用新型的工作原理为:行走机构20行驶到待栽植的位置时,种植驱动件61驱
动冲压杆62将地面冲压出用于栽植的孔洞,然后分枝件42将位于箱体41内待栽植的插条翻转入挡罩50内,拨杆33抬起将待栽植的插条从插条孔321处以垂直于地面的方向落出挡罩50并落入冲压杆62冲压出的孔洞内,水管63向孔洞内注入水源,以完成栽植。
49.与现有技术相比,本实用新型所提供的智能沙漠植树机器人具有以下有益效果:
50.通过行走机构、基座、装载箱、挡罩及种植机构的相互配合,即利用行走机构提供移动功能,基座提供支撑功能,装载箱内装载待栽植的插条,并与挡罩及种植机构配合将插条进行栽植,能够实现在沙漠中的植树,植树效果好,效率高,成本低。
51.以上所述本实用新型的具体实施方式,并不构成对本实用新型保护范围的限定。任何根据本实用新型的技术构思所做出的各种其他相应的改变与变形,均应包含在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1