一种双孢蘑菇智能采收切根一体化系统及跟随收集方法
1.本发明涉及一种双孢蘑菇智能采收切根一体化系统,属于农作物收获机械技术领域。
背景技术:
2.目前,双孢蘑菇的主流生产方式是工厂化生产,在工厂化生产中,双孢蘑菇的生长周期较短生长速度快,对于成熟的双孢蘑菇需要及时采摘,否则将导致双孢蘑菇品质下降。双孢蘑菇的培育过程除了采收,其它过程例如上料、覆土、分级、包装等都基本实现了机械化、自动化。在双孢蘑菇采摘部分一方面需要耗费大量的人力对成熟的双孢蘑菇进行及时进行采摘,另一方面还需要人工专门对采摘完的双孢蘑菇进行切根处理,否则根部的污染物影响双孢蘑菇的品质。在双孢蘑菇采收方面需要耗费大量的人力。并且双孢蘑菇种植时是多层种植,需要实现对不同高度以及位于不同培养层的双孢蘑菇进行采收。
3.目前现有的双孢蘑菇采收装置,基本上只能蘑菇实现“一刀切”式的采摘,将切下来的根部留在培养料中,不能将根部清除,影响下次蘑菇的生长。
4.因此,有必要提供一种新型的采收一体化系统,针对多层培养架结构,即可实现高效的选择性采摘、切根,又可实现蘑菇的自动收集。
技术实现要素:
5.本发明的目的在于解决上述现在的双孢蘑菇机械化收获技术存在的问题,提供一种双孢蘑菇多臂智能采收切根一体化系统,从而增强双孢蘑菇采收机械化的适应性,实现对蘑菇从采摘到切根到收集的一体化。
6.为了解决上述的技术问题,本发明采取以下的技术方案。
7.一种双孢蘑菇智能采收切根一体化系统,其包括双孢蘑菇多臂采摘机器人移动平台、视觉检测装置、多臂采摘装置、自动切根装置、跟随收集装置和传输装置;双孢蘑菇多臂采摘机器人移动平台在多层培养架两侧安装的水平导轨上方移动;视觉检测装置用于对双孢蘑菇进行识别,视觉检测装置安装在多臂采摘装置上;多臂采摘装置和自动切根装置安装在双孢蘑菇多臂采摘机器人移动平台上,多臂采摘装置采摘的双孢蘑菇移动通过自动切根装置时,实现对双孢蘑菇的切根;自动切根装置的下方设置输送带,切根后的双孢蘑菇和蘑菇根部分别落入输送带上的蘑菇掉落区域和根部掉落区域,并随输送带输送至跟随收集装置由跟随收集装置收集;跟随收集装置包括升降机构、收集篮、驱动轮、辅助轮、跟随检测信号接收端和跟随检测信号接收端;升降机构包括立杆和安装在立杆上的竖直导轨,竖直导轨上安装滑块,滑块在竖直方向的上下运动由升降机构驱动装置驱动;滑块的上方安装收集篮,收集篮和输送带的输出端对准,收集篮 的中间用隔板隔开,将收集篮划分为蘑菇存放区域和根部
存放区域,分别用于存放切根后的双孢蘑菇和蘑菇根部;滑块的一侧水平固定安装驱动轮连接板,驱动轮连接板用于连接两个驱动轮,驱动轮在多层培养架外设的上方水平导轨上前后运动,升降机构的立杆底部设有下方底板,下方底板上设置两辅助轮,两辅助轮在多层培养架外设的底部水平导轨上前后运动,驱动轮和辅助轮的同步运动由驱动轮电机驱动;跟随检测信号接收端安装在滑块上,随着滑块上下移动适应多层培养架的不同层高,跟随检测信号发出端安装在双孢蘑菇多臂采摘机器人移动平台的外侧,跟随检测信号接收端和跟随检测信号发出端相互配合,使得跟随收集装置自动跟随双孢蘑菇多臂采摘机器人移动平台;跟随收集装置的下方为传输装置,收集篮中收集的切根后的双孢蘑菇和蘑菇根部输出至传输装置上。
8.本发明中,多臂采摘装置包括y方向移动模组、x方向移动模组和采摘末端执行器, y方向移动模组有若干个,每个 y方向移动模组均安装在x方向移动模组上,每个y方向移动模组和一个采摘末端执行器滑动连接,每个y方向移动模组的尾部固定安装有一个自动切根装置,采摘末端执行器和自动切根装置一起随着y方向移动模组在x方向移动;自动切根装置包括水平设置的切根刀片,切根刀片的刀刃正对着采摘末端执行器的下方,当采摘末端执行器在y方向移动模组快速滑动接近切根刀片, 实现对采摘末端执行器采摘的双孢蘑菇的切根。
9.本发明中,y方向移动模组为2个以上。
10.本发明中,自动切根装置中还包括切根刀片固定架和自动切根装置固定板,自动切根装置固定板竖直安装在y方向移动模组的尾部, 切根刀片固定架呈l型,其竖直面通过腰型孔和自动切根装置固定板相连,切根刀片设置在切根刀片固定架水平面的前端。
11.本发明中,收集篮固定板上方或者收集篮的底部设置重量检测元件。
12.本发明中,收集篮的蘑菇存放区域和根部存放区域的下方分别至少包括一个旋转挡板,旋转挡板的转动使得收集篮底板开启,使得切根后的双孢蘑菇和蘑菇根部落在传输装置上。
13.本发明进一步提供采用上述的双孢蘑菇智能采收切根一体化系统的跟随收集方法,包括以下步骤:当双孢蘑菇多臂采摘机器人移动平台开始在某一层培养架移动时,跟随收集装置上的升降机构启动带动滑块升到相应的高度,使得跟随信号接收端与跟随信号发出端在同一水平面;随后,跟随收集装置由驱动轮电机驱动前进或者后退,当跟随收集装置上的跟随检测信号接收端检测到双孢蘑菇多臂采摘机器人移动平台外侧安装的跟随检测信号发出端的信号时,到达位置,跟随收集装置停止前进或者后退;此时,收集篮对准输送带的出料口,然后开始收集;当重量检测元件检测到收集篮收集满后,收集篮下降到最下方,开启旋转挡板,使得切根后的双孢蘑菇和蘑菇根部落在传输装置上;当收集篮内部的双孢蘑菇以及蘑菇根部全部掉落后,旋转电机或者旋转气缸启动,将篮子底部的旋转挡板关闭,随后跟随升降机构上升,到达指定位置等待下一次的收集。
14.相对于现有技术,本发明的有益效果在于:1)本发明的视觉检测装置安装在多臂采摘装置上,能与末端执行器在x、y向同步工作,并且能够实现多臂同时采摘,进而实现采摘效率最大化。
15.2)本发明的采摘好的蘑菇只需要在一个方向y向移动而不需多轴联动即可实现切根,动作简单高效;自动切根装置能够快速实现对双孢蘑菇的切根,并且能够将切除的根部与蘑菇分开传送收集,防止蘑菇的根部泥土污染蘑菇。
16.3) 本发明的跟随收集装置能够通过自身的动力装置驱动前进后退实时跟随双孢蘑菇多臂采摘机器人的前进,再通过接近开关来实时控制收集篮对准输送带的出口,完成实时收集。
17.4)本发明的跟随收集装置能够通过升降机构驱动收集篮到达不同层以适应多层培养架各层上的收集。
18.5)本发明的收集篮可实现蘑菇与根部的隔离收集,并自动实现收料与落料。
附图说明
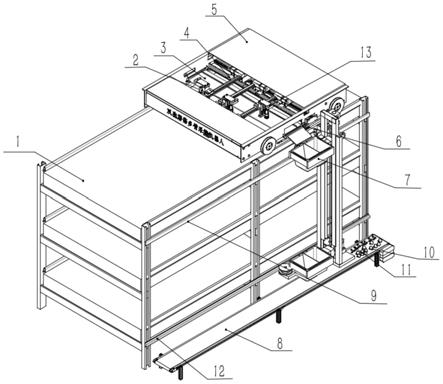
19.图1为本发明的面向工厂化生产的一种双孢蘑菇多臂智能采收切根一体化系统的结构示意图。
20.图2为本发明的多臂采摘装置的局部放大图。
21.图3为本发明的跟随检测传感器局部放大图。
22.图4为本发明的跟随收集装置跟随导向连接行走示意图。
23.图5为本发明的跟随收集工作收集篮不同位置工作流程示意图。
24.图6为本发明的跟随收集装置结构示意图。
25.图7为本发明的自动切根装置示意图。
26.图8为本发明的收集篮示意图。
27.图9为本发明的收集篮底板示意图。
28.图中标号:1
‑
多层培养架,2
‑
多臂采摘装置,3
‑
输送带,4
‑
自动切根装置,5
‑
双孢蘑菇多臂采摘机器人移动平台,6
‑
跟随检测信号接收端,7
‑
跟随收集装置,8
‑
传输装置,9
‑
培养架上导轨,10
‑
切根后的双孢蘑菇,11
‑
蘑菇根部,12
‑
培养架下导轨,13
‑
视觉检测装置,201
‑
采摘末端执行器,202
‑
y方向移动模组,203
‑
x方向移动模组,401
‑
切根刀片,402
‑
切根刀片固定架;403
‑
自动切根装置固定板,701
‑
升降机构,702
‑
滑块,703
‑
收集篮,704
‑
收集篮固定板,705
‑
重量检测元件,706
‑
下方底板,707
‑
辅助轮,708
‑
升降机构驱动电机,709
‑
驱动轮连接板,710
‑
驱动轮,711
‑
驱动轮电机,712
‑
跟随检测信号发出端,713
‑
传感器固定板。
具体实施方式
29.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
30.实施例1参见图1
‑
9,本发明的一种双孢蘑菇多臂智能采收切根一体化系统,包括双孢蘑菇多臂采摘机器人移动平台5、多臂采摘装置2、自动切根装置4、视觉检测装置13、跟随收集装置7以及传输装置8。视觉检测装置13固定在多臂采摘装置2上,多臂采摘装置2固定在双孢蘑菇多臂采摘机器人移动平台5上,用于实现双孢蘑菇的识别与采摘的“手眼”协同工作。多臂采摘装置2快速通过自动切根装置4,对双孢蘑菇进行切根,切完根后的双孢蘑菇落料在自动切根装置4下方的输送带3上,随后输送带3将完成切根后的双孢蘑菇10以及蘑菇根部
11输送到跟随收集装置7,从而完成对双孢蘑菇识别、采摘、切根以及收集的一体化作业。
31.实施例中,多臂采摘装置2与自动切根装置4通过普通螺栓连接方式安装在双孢蘑菇多臂采摘机器人移动平台5上。多臂采摘装置2包含:3个采摘末端执行器201、3条y方向移动模组202以及一条x方向移动模组203。其中3条y方向移动模组202同时安装在x方向移动模组203上,3个采摘末端执行器201分别安装在x方向移动的y方向移动模组202上。每一个y方向移动模组202的尾部都固定安装有一个自动切根装置4,一起随着y方向移动模组202在x方向移动,采摘末端执行器201将蘑菇采摘固定住在蘑菇快速通过切根刀具401的瞬间完成对蘑菇根部的切除,完成对双孢蘑菇的切根,自动切根装置4所使用的切根刀片401为超薄型锋利刀片或者其他剪切类刀片等,切根刀片401的高度通过连接切根刀片固定架402和自动切根装置固定板403的腰型孔调节,从而调节切除双孢蘑菇根部的位置,切根后的双孢蘑菇10与蘑菇根部11则分区放在输送带3上。多臂采摘装置2下方的输送带3分为两个区域(或者使用两条输送带),在切根刀片401下方的区域为根部掉落区域,另一半为蘑菇掉落区域,掉落在输送带3上两个区域的蘑菇根部11与切根后的双孢蘑菇10通过输送带3的转动向外输出,分别输送到跟随收集装置7,有效的将两者分开传送收集,防止成品蘑菇被蘑菇根部11的泥土污染。采摘双孢蘑菇时,采摘末端执行器201将蘑菇采摘固定住,然后采摘末端执行器201以一定的速度带着采摘下来的双孢蘑菇往y负方向移动,通过切根刀片401,当双孢蘑菇的根部完全通过切根刀片401并且完成切根过后,此时蘑菇根部11则掉落在切根刀片401下方的根部掉落区域。随后,采摘末端执行器201带着切根后的双孢蘑菇10往y方向移动,当到达输送带3上的蘑菇掉落区域时,开始落料。此时完成一次采摘与切根。
32.跟随收集装置7通过上端悬挂方式上端固定在多层培养架1的上方,驱动轮电机711驱动驱动轮710使得跟随收集装置7前进与后退。跟随收集装置7能适应不同层培养架高度的使用,能实时跟随双孢蘑菇多臂采摘机器人移动平台5完成收集。跟随收集装置7包括升降机构701、收集篮703、驱动轮710、辅助轮707、驱动轮电机711、跟随检测信号发出端6和跟随检测信号接收端712。升降机构701包括立杆和安装在立杆上的竖直导轨;竖直导轨上安装滑块702,滑块702的上下运动可由升降机构驱动电机708驱动,或者采用气缸、液压缸驱动,或者采用或者丝杆模组上下传动方式,滑块702上固定有收集篮子固定板704,带着收集篮703一起跟随升降机构701上的滑块702上下运动。收集篮703分割成蘑菇收集区和根部收集区两部分,可实现对切根后的双孢蘑菇10和蘑菇根部11的分别收集,防止成品蘑菇被蘑菇根部11的泥土污染。收集篮703底部采用旋转挡板,利用能通过旋动电机或旋动气缸驱动的“开门与关门”的形式,自动实现集料与落料的功能,跟随检测信号接收端712安装在滑块702上,可以上下移动以此适应多层培养架1的不同层高。
33.跟随收集装置7通过安装在升降机构701上的驱动轮电机711去驱动跟随收集装置7的驱动轮710以及辅助轮707,其中驱动轮707紧紧贴合培养架上导轨9保证跟随收集装置7前进的动力与方向,辅助轮707则紧贴培养架下导轨12,使跟随收集装置7能够一直贴近多层培养架1,防止跟随收集装置7与多层培养架1 过度摩擦或者向外摇晃。跟随收集装置7能够通过自身的升降机构701上下,从来适应不同层的培养架高度。
34.跟随收集装置7自动跟随双孢蘑菇多臂采摘机器人移动平台5的实现是依靠双孢蘑菇多臂采摘机器人移动平台5上安装的若干跟随检测信号发出端6和安装在跟随收集装置的滑块702上的跟随检测信号接收端712之间类似于对射式传感器的方式实现。跟随检测
信号接收端712同时安装在传感器固定板713上,跟随滑块702上下移动。如图3所示,如当跟随收集装置7上的跟随信号接收端712的一号信号接收器接收到双孢蘑菇多臂采摘机器人移动平台5上的跟随信号发出端6上发出的信号则跟随收集装置7落后于双孢蘑菇采摘机器人移动平台5。当二号信号接收器接收到双孢蘑菇多臂采摘机器人移动平台5上的跟随信号发出端6上发出的信号则跟随收集装置7正好可以完成收集,当三号信号接收器接收到双孢蘑菇多臂采摘机器人移动平台5上的跟随信号发出端6上发出的信号时则跟随收集装置7落后于双孢蘑菇采摘机器人移动平台5。具体的说,当双孢蘑菇多臂采摘机器人移动平台5开始在某一层培养架移动时,跟随收集装置7上的升降机构701启动带动滑块702升到相应的高度,使得跟随信号接收端712与跟随信号发出端6在同一水平面。随后,跟随收集装置7由驱动轮电机711驱动前进或者后退,当跟随收集装置7上的跟随检测信号接收端712接收到双孢蘑菇多臂采摘机器人移动平台5外侧安装的跟随检测信号发出端6发出的信号时,跟随收集装置7到达收集位置,跟随收集装置7停止前进或者后退;此时,收集篮703对准输送带3的出料口,此时开始收集。当重量检测元件705检测到收集篮703装满后,升降机构701下降到达指定位置,收集篮703底部的旋转电机启动,将篮子底部的旋转打开,收集篮703内的双孢蘑菇以及切除的根部落在传输装置8上。随后被传输出去。
35.采用实施例中的双孢蘑菇多臂智能采收切根一体化系统的工作流程具体如下:首先双孢蘑菇多臂采摘机器人移动平台5在多层培养架1上进行行走,将多臂采摘装置2移动到需要采摘的双孢蘑菇所在的位置。此时,视觉检测装置13与多臂采摘装置2相配合完成对需要采摘的双孢蘑菇的识别与采摘,将双孢蘑菇从土壤中采摘下来过后,多臂采摘装置2快速向自动切根装置4方向移动,以一定的速度通过自动切根装置4,此时,双孢蘑菇需要切除的根部已经移除,分别掉落在输送带3的前后两个区域。当双孢蘑菇多臂采摘机器人移动平台5开始在某一层培养架移动时,跟随收集装置7上的升降机构701启动带动滑块702升到相应的高度,使得跟随信号接收端712与跟随信号发出端6在同一水平面。随后,跟随收集装置7由驱动轮电机711驱动前进或者后退,当跟随收集装置7上的跟随检测信号接收端712接收到双孢蘑菇多臂采摘机器人移动平台5外侧安装的跟随检测信号发出端6发出的信号时,跟随收集装置7到达收集位置,跟随收集装置7停止前进或者后退;此时,收集篮703对准输送带3的出料口,此时开始收集。到重量检测元件705检测到收集篮703已经装满过后,升降机构701下降到达指定位置后,收集篮703底部的旋转电机(或者旋转气缸)启动,将篮子底部的旋转挡板打开,当收集篮703内部的双孢蘑菇以及蘑菇根部全部掉落后,旋转电机(或者旋转气缸)启动,将篮子底部的旋转挡板关闭,随后跟随升降机构701上升,到达指定位置等待下一次的收集。而收集篮703内的双孢蘑菇以及切除的根部则全部落在传输装置8上。随后被传输出去。传输装置8是一种能实现长距离传输的装置,不仅仅限制于输送带,也可以是滚筒等其他形式。
36.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1