集成化智能种植装置
1.本发明涉及智能控制技术领域的一个作物种植装置,是一种集成化智能种植装置。
背景技术:
2.作物的生长会受温度、湿度、光照、土壤条件等各种因素影响,在自然的条件下,由于气候、土壤分布不同,造成作物生长条件的不能满足,所以设想利用技术手段建立一个适合作物生长的局部环境,独立于外部环境或对外部环境变化实现缓冲,减小环境的变化对粮食作物的影响,在原来作物无法适应(不能耕种或不适合耕种)的自然空间中,构造出适合作物生长的局部环境。
技术实现要素:
3.为了解决背景技术中存在的问题,本发明得目的在于提供一种智能种植装置,利用技术手段构造出适合作物生长的局部环境,减小环境的变化对粮食作物的影响,通过智能控制管理,调整温度、湿度、光照、养分等,为作物生长提供最佳的条件。
4.为实现上述目的,本发明提供的技术方案是:
5.本发明包括墙体、保温层、隔板、种植层、防水盒体、太阳能电池、太阳能发电装置和传感器网络等;所述种植装置包括主体结构和内部功能设施,所述主体结构,包括底部、墙体和顶部,底部和顶部间围设墙体;所述内部功能设施包括通风及空气循环过滤系统、水循环系统、太阳能发电及储能系统、巡行机器人、led光谱补光系统、传感器网络和中央处理单元。由多个集成种植装置组网,可形成分布式的植物工厂。
6.所述顶部设置为外层和内层的双层结构,外层设置外层玻璃,外层玻璃上安装太阳能发电装置;内层设置内层玻璃,内层玻璃的外表面为凹面结构且涂覆选择性光谱涂层,通过选择性光谱涂层进行分光,将植物生长所需光谱透过,将其他光谱反射至外层玻璃上的太阳能发电装置进行发电。所述的内层玻璃内表面布置百叶窗。
7.所述墙体内围成种植空间,所述墙体上具有内部设施的安装接口龙门框架导轨和外部功能机械输入接口导向导轨,外部功能机械输入接口导向导轨设置在墙体内壁,墙体外壁铺设太阳能电池。
8.所述底部为位于种植空间内的上下两层箱体结构,分别为结构层和种植层;结构层包含保温层和防水盒体,较底层为保温层,保温层之上为防水盒体,防水盒体上布置种植层,种植层种植植物,结构层和种植层之间设置有带有细孔的隔板。所述的防水盒体主要由碎石填埋并在碎石中铺设热力管道构成。所述的种植层铺设配方土壤。
9.所述通风及空气循环过滤系统包括空气滤网、紫外照明器和空气循环箱、空气缓冲室;空气循环箱的输入口设有空气滤网,空气循环箱内设置紫外照明器,空气循环箱的输出口连接到种植空间;种植空间的排气口和空气输出缓冲室连接,空气输出缓冲室内设有凝集器,空气输出缓冲室连通外界大气,同时空气输出缓冲室底部经水处理器和水循环系
统连接,空气输出缓冲室内经凝集器凝结空气中的水分经水质滤网流到水循环系统中。
10.所述水循环系统包含了配方容器、计量泵、混合罐、储水箱、水处理器、紫外照明器和水质滤网;配方容器出口经计量泵和混合罐连通,混合罐一端接喷灌接口,另一端接储水箱,储水箱和水处理器连通,水处理器侧方设有紫外照明器,水处理器底端为入口端,水处理器底端设有水质滤网。
11.所述巡行机器人又称多功能机械手,包含龙门框架导轨、机械手导轨和多功能机械手,龙门框架导轨横跨置于两侧的墙体上,机械手导轨竖直布置,机械手导轨上端固定于龙门框架导轨的滑块上,机械手导轨下端安装多功能机械手。所述巡行机器人,通过对种植空间的高密度的逐点坐标连续扫描,完成对种植空间的寻址和功能传达。
12.所述多功能机械手包含立体视频成像系统、同口径激光、uv头、液肥喷灌头和清扫机械手,分别进行视觉图像采集、辨识,激光除虫、除草、分蘖,作物疾病治疗,精确喷灌,清扫等操作,由立体视频成像系统寻找定位目标,由同口径激光完成杀虫、除草等工作,全程无农药、除草剂等化学污染,完成绿色种植。
13.所述的led光谱补光系统包括了led阵列,led阵列布置在墙体内壁周围以及龙门框架导轨和百叶窗之间的顶层,led阵列采用红蓝led阵列。
14.所述太阳能电池、太阳能发电装置均经电能转换与电池堆连接到电源管理模块,太阳能电池、太阳能发电装置、电能转换与电池(储能)堆构成了太阳能发电及储能系统,通过电源管理模块实现外电输入和太阳能储能供电切换。
15.本发明的有益效果是:
16.本发明每个种植单元由结构组成封闭空间,具有独立的内部环境和控制体系以及水气循环系统。由中央控制单元、通风及空气循环过滤系统、水循环系统完成内部环境的维护;由巡行机器人完成作物的日常管理;实现全程无农药、无除草剂等化学污染的绿色种植。由太阳能发电系统完成系统所需能量的收集。高度自动化和智能化,可实现(准)能量自持的自主运行。由中央控制室对各单元进行监控和整体控制。
附图说明
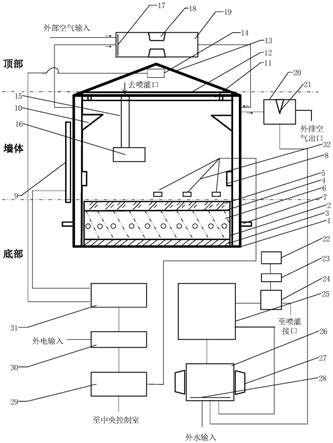
17.图1是本发明所述集成化智能种植装置整体布局图示意图。
18.图2是本发明分布式植物工厂整体布局图示意图。
19.图1中:1墙体,2箱体,3保温层,4隔板,5种植层(配方填充物),6防水盒体(碎石填充物),7导管,8导向导轨,9太阳能电池,10led阵列,11龙门框架导轨,12内层玻璃,13外层玻璃,14太阳能发电装置,15机械手导轨,16多功能机械手,17空气滤网,18紫外照明器,19空气循环箱,20空气输出缓冲室,21水汽凝集器,22配方容器,23计量泵,24混合罐,25储水箱,26水处理器,27紫外照明器,28水质滤网,29中央处理单元,30电源管理模块,31电能转换与电池(储能)堆,32传感器网络。
具体实施方式
20.为了更好的理解本发明的技术方案,下面结合附图和以一个作物生长周期种植单元系统工作过程实施例对本发明作进一步描述,但本发明的实施方式不限于此。
21.所述集成化智能种植装置包括主体结构和内部功能设施,主体结构包括底部、墙
体和顶部,底部和顶部间围设墙体;内部功能设施包括通风及空气循环过滤系统、水循环系统、太阳能发电及储能系统、巡行机器人、led光谱补光系统和传感器网络32以及中央处理单元29。
22.各个种植装置根据环境而分散部署,联网组成集群,实现分布式的较大规模的植物工厂。由中央控制室对各种植单元进行监控和整体控制,高度自动化和智能化,可实现准能量自持的自主运行。
23.种植装置的主体结构为永备建筑或者是可实现运输、异地部署的集装箱结构,种植装置主体结构具有坚固、封闭、通光、绝热,具备抵御外部自然环境的灾害性变化能力,形成内部独立的空间,种植装置具有独立的空气循环、水循环系统,构造稳定的局部环境,保障植物的生长;种植装置具有能量收集和管理系统,种植单元具有独立的种植功能执行机构。
24.顶部为阳光通道,实现采光、隔热、发电,并对风雨温度隔绝。顶部设置为外层和内层的双层结构,外层设置外层玻璃13,外层玻璃13为三角拱形板或斜面,为提供支持、外部环境隔断,外层玻璃13上安装太阳能发电装置14;内层设置内层玻璃12,内层玻璃12为一侧凹面结构,凹面朝向太阳能发电装置14且表面涂覆选择性光谱涂层,通过选择性光谱涂层进行分光,将植物生长所需光谱透过供作物的生长,将其他光谱的阳光应用反射至外层玻璃13上的太阳能发电装置14进行发电,实现系统的自持或准自持的运行;
25.内层玻璃12朝向种植空间一侧布置百叶窗。内层玻璃12内层的透过率由百叶窗机构调整,满足不同种类植物和不同生长阶段作物的光照需求,更好的适应不同的环境。
26.墙体是整个设施的支撑结构,具有相当的强度和承重能力以及相当的绝热能力,可参照集装箱的壁墙设计轻便、坚固、隔热。墙体1内围成种植空间,墙体1上具有内部设施的安装接口和外部机械功能输入接口,外部机械功能输入接口即导向导轨8设置在墙体1内壁,导向导轨8用于引导外接机械功能输入的运行轨迹,墙体1外壁铺设太阳能电池9以实现发电;外部功能机械输入接口在一侧墙面设置通道,用于接驳外部机械功能输入,如播种、收获机械等,采用机器人实现自动化操作。
27.墙体1内安置各种导管和引线,作为水、电的通道。
28.墙体1设导管接口7,用于防水盒体铺设管道的接入。
29.底部为位于种植空间内的上下两层箱体结构,分别为结构层和种植层;结构层包含保温层3和防水盒体6,较底层为保温层3,保温层3之上为防水盒体6,防水盒体6上布置种植层5,种植层5种植植物,结构层和种植层5之间设置有带有细孔的隔板4,通过隔板4隔开铺设在种植层5的配方土壤和填充在防水盒体6里的碎石,同时隔板采用带细孔的钢板有利于导热。
30.防水盒体的高度要适应水稻等有水浸需要的植物种植,防水盒体6主要由碎石填埋并在碎石中铺设管道构成,其中铺碎石实现水分联通涵养;内铺设管道,可通蒸汽或热水,以实现土温的调节,可用于极度寒冷的环境或反季节种植,或在杀灭土居害虫时,将其赶出土壤表面,进而由激光在地面进行消杀;防水盒体6最底部还设置有阀门,阀门连接于种植空间外部,用于水量和土壤湿度的调节。种植层5铺设针对特定植物的人工配方土壤,至种植深度,以进行作物的种植。
31.如图1所示,太阳能电池9、太阳能发电装置14均经电能转换与电池堆31连接到电
源管理模块30,太阳能电池9、太阳能发电装置14、电能转换与电池堆31和电源管理模块30构成了太阳能发电及储能系统。
32.太阳能电池9、太阳能发电装置14白天产生的电能用于维持系统的运作,多余电能存入电池堆。供夜间使用。太阳能能量不足时,接入外部电源。太阳能供能和外部电源供能之间的切换通过电源管理30模块进行。
33.如图1所示,通风及空气循环过滤系统包括空气滤网17、紫外照明器18和空气循环箱19;空气循环箱19的输入口设有风机和空气滤网17,空气循环箱19内设置紫外照明器18,空气循环箱19的输出口连接到种植空间;
34.通风及空气循环过滤系统主要功能为新鲜空气补进、内部空气循环及种植废气的排出。从外部空气输入口输入补充的新鲜空气通过风机和空气滤网17,隔绝沙尘和虫害,在空气滤网17后设紫外照明器18,进行紫外杀菌消毒后的新鲜空气进入种植空间;种植空间的内部空气循环通过支管路到空气循环箱19内,经风机和空气滤网17过滤和紫外照明器18进行紫外杀毒,再回到种植空间,保障种植空间中的空气流通及空气洁净,且无毒无菌。
35.种植废气的排出:空气中当氧含量或其他气体成分超标时,将种植空间的空气排出一部分,同时开新风,置换为新鲜空气,待排出的空气先进入空气输出缓冲室20,通过凝集器21凝集水汽,进行脱水,将空气中的水分从空气里析出,之后干燥空气排出,凝出的水汽水分进入水循环系统,高效重复应用。空气输出缓冲室20连通外界大气,同时空气输出缓冲室20底部经水质滤网28和水循环系统连接,空气输出缓冲室20内经凝集器21凝结空气中的水分经水质滤网28流到水循环系统中;
36.如图1所示,水循环系统包含了计量给肥系统包括配方容器22、计量泵23、混合罐24,储水箱25,紫外消杀系统水处理器26包括紫外照明器27和水质滤网28,空气析水系统空气输出缓冲室20,外部补水阀门;配方容器22出口经计量泵23和混合罐24连通,混合罐24一端接喷灌接口,喷灌接口接喷头,喷头伸入到种植空间并安装在巡行机器人的多功能机械手16上,另一端接储水箱25,储水箱25和水处理器26连通,水处理器26侧方设有紫外照明器27,水处理器26底端为入口端,水处理器26底端设有水质滤网28。
37.通过计量泵23从配方容器22中抽取给肥到混合罐24,从储水箱25中抽取的水到混合罐24,将给肥和水在混合罐中混合后,用喷灌的方式对作物补水施肥,通过计量泵精确给肥,保障植物的生长,既不会营养元素不足影响植物生长,又不会施肥过多,造成浪费,形成污染;
38.空气输出缓冲室20内经凝集器21凝结空气中的水分,经水处理器26进行过滤和紫外照射消毒,流入储水箱25中,供种植单元使用,外部补进的水经过同样的流程,也汇入储水罐25中。储水箱25中水经管路实现内循环,实现对箱中储水的消杀。
39.如图1所示,巡行机器人又称多功能机械手,包含龙门框架导轨11、机械手导轨15和多功能机械手16,龙门框架导轨11横跨置于两侧的墙体1上,为循行机器人安装、运动基础,龙门框架导轨11上再布置内层玻璃12,机械手导轨15竖直布置,机械手导轨15上端固定于龙门框架导轨11的滑块上,机械手导轨15下端安装多功能机械手16;
40.主要功能单元包含视频探头、激光平台、uv头、喷灌头、清扫机械手等。视频探头进行视频图像采集、辨识;激光平台和uv探头完成激光除虫、除草、分蘖,作物疾病的治疗;喷灌头完成精确喷灌;清扫机械手设置吹气头,通过吹出的气流完成清扫等操作。
41.巡行机器人在龙门框架导轨的引导下,按作物种植轨迹在作物种植区逐点高密度立体巡行,观察每颗植株的生长状态。观察叶茎形态,判断作物的生长状态和健康状态,确定是否发生病虫害及其种类;观察寻找植株上和地面有无害虫的踪迹,根据影象,判断害虫的种类,确定激光参数,并确定方位,引导激光平台发射激光杀灭害虫;观察地面杂草生长,引导激光清除杂草;在需要分蘖、剪枝操作时,引导激光清除植株上需剪掉的部分。激光平台提供杀灭剪切能量,根据目标任务不同,激光平台可以调整功率、脉冲时间、聚焦位置和焦斑大小,完成杀灭任务及修剪等工作,而对植株的伤害最小化。若叶茎表面出现病害,则用uv照射治疗。根据总体湿度和局地湿度分布,牵引喷淋头按坐标、按需精确喷灌。对清除的杂草、分蘖剪枝剥离部分,由清扫机构收集,搬运至清出口。
42.led光谱补光系统包括了led阵列10,led阵列10布置在墙体1内壁周围以及龙门框架导轨11和百叶窗之间的顶层,led阵列10采用红蓝led阵列,针对作物光合作用的峰值波长进行光谱补强。具体地,针对作物光合作用的峰值波长,利用自有的能量或外接的能量进行光谱补强,增强植株的光合作用,增加能量转换率,加快作物的生长。在光照不足的时候,可以代替作为主光源,保护作物持续生长。
43.内部环境传感系统主要包括气温、地温、空气湿度、空气成分传感器氧气传感器、二氧化碳传感器等、土壤成分传感器、分布式土壤湿度传感、水位传感器、水质传感器、巡行机器人的位置、姿态传感、光照强度传感,辐射均匀度传感,色度传感等等,众多传感器构成了传感器网络32;其中包含了温湿度传感系统。
44.多种传感器感应种植空间中各种环境参数,分析水、空气、土壤、光照等要素的当前状态,供中央控制单元分析、监控应用。多种传感器构成了传感器网络32,传感器网络32连接到中央处理单元29,受中央处理单元29控制采集。
45.传感器网络32汇集各类传感器数据,进行视觉图像的采集、处理和分析,将采集、处理和分析获得的数据信息发送至远端中央控制单元29,中央控制单元29再发送到中央控制室,并由中央控制单元29接收远端的中央控制室的指令,发出各类执行指令,控制每个智能种植系统装置的运行,实现远程监控。
46.本发明的种植工作过程(一个作物生长周期):
47.针对不同的作物,在种植层5装填不同的人造配方土壤,具有精确的化学配比和特定的土壤构造,适应特定作物的土壤环境。
48.借助外部机械功能输入接口导向导轨8,接驳、引导外部播种机器人进入,进行作物的播种,完成最优密度的自动化播种。
49.播种完成,封闭系统,自持运行。由结构组成封闭空间;由中央控制单元29、通风及空气循环过滤系统、水循环系统、led补光系统、内部传感系统完成内部环境的维护,多种传感器敏锐感应种植空间中各种环境参数,传输给中央控制单元,中央控制单元汇集各类传感器数据,并将本地的相关信息发送至远端中央控制室,并接受远端中央控制室的指令,实现远程监控,发出各类执行指令,控制种植装置内各子系统(包括通风及空气循环过滤系统、水循环系统、led光谱补光系统)的运行;由巡行机器人完成作物的日常管理,包括视觉图像采集、辨识(包括作物杂草生长状态、作物或地面有无虫害、是否需要分蘖剪枝清扫等)、激光除虫、除草、分蘖,作物疾病的治疗,精确喷灌,清扫等操作;由太阳能发电系统完成系统所需能量的收集。
50.作物成熟后,打开通道,借助外部机械功能输入接口8,接驳外部的收割机器人进入,完成作物的自动收割。
51.根据后续种植计划,对土壤进行处理。清除作物残余,回收土壤,并填充新土。准备下一个周期的种植。
52.由此实施可见,本发明是由中央控制单元对各单元进行监控和整体控制,高度自动化和智能化,可实现(准)能量自持的自主运行;作物生长全程光学杀虫除草,无农药无污染,实现绿色种植;整个种植空间是个封闭系统,减小环境的变化对粮食作物的影响。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1