一种可对萝卜除泥的自动萝卜收获机的制作方法
1.本发明涉及农作物机械技术领域,尤其涉及一种可对萝卜除泥的自动萝卜收获机。
背景技术:
2.萝卜的营养价值极高,有蔬菜之王之称,由于萝卜具有较强的适应能力以及耐保存,在我国大范围均有栽种,公布号:cn108293402a一种萝卜收获机,包括移动车架与牵引机构连接,沿着移动车架的长度方向前后端分别布置有割叶机构、挖根机构及收料机构,割叶机构包括板片水平的割刀,割刀的刀刃朝向移动车架的长度方向,挖根机构包括两片开土板,两片开土板沿着移动车架的长度方向的前后端倾斜布置,两片开土板的前端高、后端低,两片开土板呈“八”字形排布且位于移动车架的前端为大间距端,收料机构的进料端位于两片开土板的后端下方布置,收料机构的出料端与料仓的进料口连通,利用割叶机构的割刀实施对莱菔叶的切割,从而方便对莱菔叶的割除,而后利用挖根机构的两片开土板将萝卜刨开,该收获机可显著提高萝卜的效率。
3.上述技术方案在对萝卜拔出之后,不能实现对萝卜进行除泥,所以拔出的萝卜还需手工除泥,比较麻烦,所以我们提出一种可对萝卜除泥的自动萝卜收获机,用于解决上述所提出的问题
技术实现要素:
4.基于背景技术存在现有的技术方案在对萝卜拔出之后,不能实现对萝卜进行除泥,所以拔出的萝卜还需手工除泥,比较麻烦的技术问题,本发明提出了一种可对萝卜除泥的自动萝卜收获机。
5.本发明提出的一种可对萝卜除泥的自动萝卜收获机,包括安装架,所述安装架的两侧均对称转动连接有两个车轮,所述安装架的顶部固定安装有固定架,且固定架内固定安装有内齿环管,所述齿环管上滑动连接有安装臂,且安装臂的底部一侧固定安装有螺杆,所述螺杆上螺纹连接有螺纹罩,所述螺纹罩的底部固定安装有十字铲,所述螺纹罩与内齿环管传动连接,所述固定架上转动连接有转动管,所述转动管的底端与安装臂的顶部一侧固定连接,所述固定架的顶部一侧固定安装有驱动电机,且驱动电机与转动管传动连接,所述螺纹罩上连接有位于内齿环管内的安装箱,且安装箱的顶部固定安装有电动推杆,所述安装箱内对称滑动连接有两个夹板,且两个夹板均与电动推杆传动连接,所述安装箱内设有清洗组件。
6.优选的,所述固定架内固定安装有安装环,且内齿环管固定安装在安装环的底部,所述安装臂滑动连接在安装环的顶部,所述转动管上和驱动电机的输出轴上均固定安装有伞齿轮,且两个伞齿轮相啮合,经由两个伞齿轮的传动能够带动转动管进行转动,通过设置的安装臂能够在进行转动时,使得螺纹罩进行环形运动。
7.优选的,所述螺纹罩上固定套设有齿轮,且齿轮与内齿环管相啮合,所述螺纹罩上
转动套设有连接环,且连接环的一侧固定安装有安装轴,所述安装箱上转动套设有转动环,所述安装轴的一端与转动环固定连接,通过齿轮与内齿环管的啮合传动,能够保证螺纹罩在环形运动的同时进行自转,以此能够使得螺纹罩既能够纵向运动,又能发生转动,方便进行掘土。
8.优选的,所述安装箱的顶部固定安装有连接架,且连接架的顶部固定安装有连接杆,所述连接杆的顶端分别贯穿安装臂和转动管并延伸至转动管的上方,所述固定架的顶部固定安装有滑杆,且连接杆的顶端固定安装有滑板,所述滑杆贯穿滑板并与滑板滑动连接,利用滑杆和连接杆的滑动连接,能够实现对安装箱进行纵向移动限位,使得安装箱只能随着螺纹罩进行纵向运动,而不会发生转动。
9.优选的,所述固定架的一侧固定安装有水箱,且水箱的顶部固定安装有水泵,所述水泵的吸水端延伸至水箱内,所述安装箱的一侧内壁上固定安装有流动管,且流动管的一端延伸至安装箱的外侧并与水泵相连接,所述流动管的另一端与清洗组件相连接,利用水泵能够将水箱内的水抽出,输送至清洗组件上,并且能够形成一定的水压。
10.优选的,所述水泵的出水端上固定安装有输水管,且输水管的一端延伸至固定架内并与固定架的顶部一侧内壁固定连接,所述输水管的一端固定连通有波纹管,所述波纹管与流动管的一端固定连通,利用波纹管的延展性,在安装箱进行移动时,始终能够保证水流正常流动。
11.优选的,所述清洗组件包括安装在安装箱内的环形喷管,且环形喷管上设有环形腔室,环形腔室的一侧内壁上等间距开设有多个水孔,且流动管的一端延伸至环形腔室内并与环形腔室的一侧内壁固定连接,利用环形腔室和多个水孔,能够保证水均匀的喷出,均匀的对萝卜进行喷淋。
12.优选的,所述安装箱内滑动连接有移动架,且移动架的两侧底部内壁上均固定安装有限位架,所述限位架内滑动连接有移动杆,且两个移动杆相互靠近的一端均延伸至安装箱内并分别与两个夹板固定连接,所述移动杆的顶部一侧转动连接有连杆,且电动推杆的输出轴延伸至移动架内并分别与两个连杆转动连接,能够同时带动两个夹板相互靠近,对萝卜进行夹紧。
13.优选的,所述移动架的顶部内壁上对称滑动连接有两个限位杆,且两个限位杆的顶端均贯穿环形喷管并均与安装箱的顶部内壁固定连接,所述限位杆上套设有位于移动架上方的压缩弹簧,且压缩弹簧的顶端和底端分别与安装箱的顶部内壁和移动架的顶部固定连接,利用两个限位杆能够对移动架进行弹性限位,并且在两个压缩弹簧的弹力作用下,能够保证对萝卜进行夹紧。
14.本发明的有益效果是:
15.1、本发明中,通过推动固定架能够使得本装置进行移动,在将安装罩移动至萝卜的正上方时,此时可启动驱动电机,可使得螺杆进行环形运动,螺纹罩便会随着螺杆进行运动,并且螺纹罩上的齿轮与内齿环管为啮合状态,因此在螺纹罩进行环形运动时,能够实现螺纹罩进行自转,并且螺纹罩与螺杆螺纹连接,所以能够使得螺纹罩在自转的同时向下进行运动,以此能够利用十字铲将萝卜周围的土壤进行清理,使得萝卜不再被土壤覆盖,同时萝卜会进入安装箱内;
16.2、本发明中,在萝卜进入安装箱内后,此时可启动电动推杆,使其输出轴向上收
缩,所以通过两个连杆能够拉动两个移动杆相互靠近,这时两个夹板便会相互靠近,直至两个夹板对萝卜进行夹紧,之后在电动推杆的拉力作用下,便会带动萝卜向上移动,使得移动架向上进行移动,两个压缩弹簧便会处于受力状态,同时两个处于受力状态下的压缩弹簧便会提供相应的弹力,传递至两个夹板上,即可利用两个夹板对萝卜进行稳定的夹持,使得萝卜由泥土中移出;
17.3、本发明中,在将萝卜移入环形喷管内后,此时可启动水泵将水箱内的水抽出,之后经过输水管、波纹管和流动管能够将水输送至环形腔室内,之后可由多个水孔喷出,所以萝卜在受到水流冲击时,能够将萝卜上的泥土冲刷掉,达到自清洁的目的。
18.本发明能采用自动的方式能够实现将萝卜由土壤中拔出,并且在拔出之后,能够实现对萝卜进行自动清洗,因此能够保证拔出的萝卜处于清洁状态,所以无需人工进行清洗,具有良好的使用方便性。
附图说明
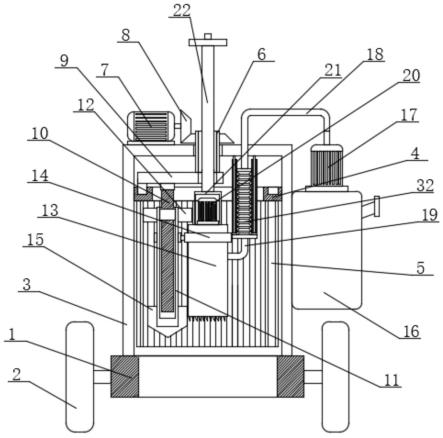
19.图1为本发明提出的一种可对萝卜除泥的自动萝卜收获机的结构主视图;
20.图2为本发明提出的一种可对萝卜除泥的自动萝卜收获机的内齿环管结构三维图;
21.图3为本发明提出的一种可对萝卜除泥的自动萝卜收获机的螺纹罩和十字铲连接结构仰视图;
22.图4为本发明提出的一种可对萝卜除泥的自动萝卜收获机的安装箱内部结构主视图;
23.图5为本发明提出的一种可对萝卜除泥的自动萝卜收获机的滑杆和连接杆连接结构侧视图;
24.图6为本发明提出的一种可对萝卜除泥的自动萝卜收获机的附图4中a部分结构示意图。
25.图中:1安装架、2车轮、3固定架、4安装环、5内齿环管、6转动管、7驱动电机、8伞齿轮、9安装臂、10螺杆、11螺纹罩、12齿轮、13安装箱、14转动环、15十字铲、16水箱、17水泵、18输水管、19流动管、20电动推杆、21连接架、22连接杆、23环形喷管、24限位杆、25移动架、26压缩弹簧、27夹板、28限位架、29移动杆、30连杆、31滑杆、32波纹管。
具体实施方式
26.下面结合具体实施例对本发明作进一步解说。
27.实施例
28.参考图1-6,本实施例中提出了一种可对萝卜除泥的自动萝卜收获机,包括安装架1,安装架1的两侧均对称转动连接有两个车轮2,安装架1的顶部固定安装有固定架3,且固定架3内固定安装有内齿环管5,内齿环管5为长条管状型,以此能够保证齿轮12在进行纵向移动时,能够始终与内齿环管5进行啮合传动,齿环管5上滑动连接有安装臂9,且安装臂9的底部一侧固定安装有螺杆10,螺杆10上螺纹连接有螺纹罩11,利用螺纹原理能够在螺纹罩11发生自转时,能够进行纵向运动,螺纹罩11的底部固定安装有十字铲15,螺纹罩11与内齿环管5传动连接,固定架3上转动连接有转动管6,转动管6的底端与安装臂9的顶部一侧固定
连接,固定架3的顶部一侧固定安装有驱动电机7,且驱动电机7与转动管6传动连接,螺纹罩11上连接有位于内齿环管5内的安装箱13,且安装箱13的顶部固定安装有电动推杆20,安装箱13内对称滑动连接有两个夹板27,且两个夹板27均与电动推杆20传动连接,安装箱13内设有清洗组件。
29.本实施例中,固定架3内固定安装有安装环4,且内齿环管5固定安装在安装环4的底部,安装臂9滑动连接在安装环4的顶部,转动管6上和驱动电机7的输出轴上均固定安装有伞齿轮8,且两个伞齿轮8相啮合,经由两个伞齿轮8的传动能够带动转动管6进行转动,通过设置的安装臂9能够在进行转动时,使得螺纹罩11进行环形运动。
30.本实施例中,螺纹罩11上固定套设有齿轮12,且齿轮12与内齿环管5相啮合,螺纹罩11上转动套设有连接环,且连接环的一侧固定安装有安装轴,安装箱13上转动套设有转动环14,安装轴的一端与转动环14固定连接,通过齿轮12与内齿环管5的啮合传动,能够保证螺纹罩11在环形运动的同时进行自转,以此能够使得螺纹罩11既能够纵向运动,又能发生转动,方便进行掘土。
31.本实施例中,安装箱13的顶部固定安装有连接架21,且连接架21的顶部固定安装有连接杆22,连接杆22的顶端分别贯穿安装臂9和转动管6并延伸至转动管6的上方,固定架3的顶部固定安装有滑杆31,且连接杆22的顶端固定安装有滑板,滑杆31贯穿滑板并与滑板滑动连接,利用滑杆31和连接杆22的滑动连接,能够实现对安装箱13进行纵向移动限位,使得安装箱13只能随着螺纹罩11进行纵向运动,而不会发生转动。
32.本实施例中,固定架3的一侧固定安装有水箱16,且水箱16的顶部固定安装有水泵17,水泵17的吸水端延伸至水箱16内,安装箱13的一侧内壁上固定安装有流动管19,且流动管19的一端延伸至安装箱13的外侧并与水泵17相连接,流动管19的另一端与清洗组件相连接,利用水泵17能够将水箱16内的水抽出,输送至清洗组件上,并且能够形成一定的水压。
33.本实施例中,水泵17的出水端上固定安装有输水管18,且输水管18的一端延伸至固定架3内并与固定架3的顶部一侧内壁固定连接,输水管18的一端固定连通有波纹管32,波纹管32与流动管19的一端固定连通,利用波纹管32的延展性,在安装箱13进行移动时,始终能够保证水流正常流动。
34.本实施例中,清洗组件包括安装在安装箱13内的环形喷管23,且环形喷管23上设有环形腔室,环形腔室的一侧内壁上等间距开设有多个水孔,且流动管19的一端延伸至环形腔室内并与环形腔室的一侧内壁固定连接,利用环形腔室和多个水孔,能够保证水均匀的喷出,均匀的对萝卜进行喷淋。
35.本实施例中,安装箱13内滑动连接有移动架25,且移动架25的两侧底部内壁上均固定安装有限位架28,限位架28内滑动连接有移动杆29,且两个移动杆29相互靠近的一端均延伸至安装箱13内并分别与两个夹板27固定连接,移动杆29的顶部一侧转动连接有连杆30,且电动推杆20的输出轴延伸至移动架25内并分别与两个连杆30转动连接,能够同时带动两个夹板27相互靠近,对萝卜进行夹紧。
36.本实施例中,移动架25的顶部内壁上对称滑动连接有两个限位杆24,且两个限位杆24的顶端均贯穿环形喷管23并均与安装箱13的顶部内壁固定连接,限位杆24上套设有位于移动架25上方的压缩弹簧26,且压缩弹簧26的顶端和底端分别与安装箱13的顶部内壁和移动架25的顶部固定连接,利用两个限位杆24能够对移动架25进行弹性限位,并且在两个
压缩弹簧26的弹力作用下,能够保证对萝卜进行夹紧。
37.工作原理:本技术方案在使用时,首先通过推动固定架3能够使得本装置进行移动,在将安装罩13移动至萝卜的正上方时,此时可启动驱动电机7,通过两个伞齿轮8能够带动转动管6进行转动,在转动管6进行转动时,能够带动安装臂9进行转动,此时便可使得螺杆10进行环形运动,螺纹罩11便会随着螺杆10进行运动,并且螺纹罩11上的齿轮9与内齿环管5为啮合状态,因此在螺纹罩11进行环形运动时,能够实现螺纹罩11进行自转,并且螺纹罩11与螺杆10螺纹连接,所以能够使得螺纹罩11在自转的同时向下进行运动,以此能够利用十字铲15将萝卜周围的土壤进行清理,使得萝卜不再被土壤覆盖,同时萝卜会进入安装箱13内,在萝卜进入安装箱13内后,此时可启动电动推杆20,使其输出轴向上收缩,这时通过两个压缩弹簧26能够使得移动架25暂时不会发生移动,所以通过两个连杆30能够拉动两个移动杆29相互靠近,这时两个夹板27便会相互靠近,直至两个夹板27对萝卜进行夹紧,之后在电动推杆20的拉力作用下,便会带动萝卜向上移动,使得移动架25向上进行移动,两个压缩弹簧26便会处于受力状态,同时两个处于受力状态下的压缩弹簧26便会提供相应的弹力,传递至两个夹板27上,即可利用两个夹板27对萝卜进行稳定的夹持,使得萝卜由泥土中移出,在将萝卜移入环形喷管23内后,此时可启动水泵17将水箱16内的水抽出,之后经过输水管18、波纹管32和流动管19能够将水输送至环形腔室内,之后可由多个水孔喷出,所以萝卜在受到水流冲击时,能够将萝卜上的泥土冲刷掉,达到自清洁的目的,因此能够保证拔出的萝卜处于清洁状态,所以无需人工进行清洗,具有良好的使用方便性。
38.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1