设施电动蔬菜移栽机
1.本发明涉及一种设施电动蔬菜移栽机,属于农业机械技术领域。
背景技术:
2.设施农业,是在环境相对可控的条件下进行动植物高效生产的一种现代农业方式,比如蔬菜大棚等。目前,以内燃机和拖拉机为动力源的蔬菜移栽机已实现大田作业,但设施蔬菜的移栽环节仍依赖人工完成,究其原因一方面由于设施内部梁柱较多,土地被分割成小块,大田移栽机因机型庞大难以施展作业;另一方面,设施内部为封闭环境,内燃机工作时会产生大量有害烟气,污染内部环境,影响作物和人员健康。
3.近几年,穴盘育苗后的设施蔬菜移栽备受关注,许多科研单位和企业相继开发出小型自走式半自动机型(比如公开号为cn105794376a的中国专利,即公开了一种多功能蔬菜移栽机),但仍以汽油机为动力源,且还存在辅助用工多、效率低、栽植质量差、地头转弯难、自动化程度低等系列问题。因此,基于常规穴盘育苗方式,研究一种设施全自动电动移栽机,实现自动取苗、定植、直线行驶、株行距精准可调等功能,弥补我国设施栽培作业机械的不足。
技术实现要素:
4.本发明要解决的技术问题是:提供一种适用于设施农业且栽植质量好的高效电动蔬菜移栽机。
5.为了解决上述技术问题,本发明提出的技术方案是:一种设施电动蔬菜移栽机,包括送苗机构、取苗机构、投苗机构和栽植机构;所述送苗机构包括安装在机架上的送苗轮以及驱动所述送苗轮旋转的送苗电机,所述送苗轮的外周设有若干与具有多个钵苗存储位的穴盘相匹配的型槽,所述型槽沿送苗轮的轴向延伸;所述取苗机构包括导槽、横杆、滑块、竖直导轨、夹爪、曲柄、连杆和水平导轨,所述导槽固定在机架上并呈弧形,所述导槽内设有可沿该导槽滑动的导块;所述曲柄由取苗电机驱动,所述曲柄远离取苗电机的一端与连杆的一端铰接,所述连杆的另一端与摆杆铰接,所述摆杆远离连杆的一端设有沿其长度方向延伸的腰形孔,所述导块插入腰形孔内并可沿腰形孔滑动;所述竖直导轨设置在机架上,所述滑块与竖直导轨形成移动副,所述水平导轨与滑块固接,所述水平导轨与导块形成移动副,所述夹爪固定在导块上,使得导块沿导槽滑动时夹爪始终保持竖直状态;所述投苗机构包括存苗桶、导苗桶和投苗瓣,所述存苗桶具有至少两个钵苗存储位,所述存苗桶的底部在每个钵苗存储位处设有挡苗板,所述挡苗板与存苗桶枢接,每个挡苗板的下方设有与该挡苗板对应的第一凸轮,所述第一凸轮可在投苗电机的驱动下旋转从而使得挡苗板按顺序间歇打开;所述导苗桶设置在存苗桶的正下方,所述导苗桶的顶部设有与存苗桶形状相匹配的锥形开口;所述投苗瓣由可绕设置在机架上的支点旋转的至少两
个瓣状投苗板构成,所述投苗瓣设置在导苗桶的底部开口处,所述投苗瓣具有打开和闭合两种工作状态;所述栽植机构包括由栽植电机驱动的栽植器,所述栽植器具有接苗工作位置和栽植工作位置,所述接苗工作位置位于投苗瓣的正下方;在工作时,所述夹爪具有与送苗轮的型槽相对应的取苗工作位置,以及与存苗桶相对应的投苗工作位置。
6.需要说明的是,本发明中所述投苗瓣为现有技术,可参考申请号为cn201821546604.6、名称为“一种辣椒新品种选育用栽苗器”的中国专利,本发明将其用于向栽植器进行投苗而不是向土中栽苗,这是本发明的创新点之一。
7.本发明带来的有益效果是:1)本发明中整机通过电驱动,绿色环保,在大棚等设施内作业时,不会影响作物和人员健康。2)本发明中送苗机构采用型槽状结构,通过送苗轮的转动给穴盘进给定位,不但定位准确,而且可以减少取苗机构误伤钵苗。3)本发明中存苗桶能够接住从存苗桶释放的多个钵苗,从而具有钵苗多取暂存功能,不但能够缓解取苗频率,而且避免漏取、伤苗现象。4)本发明集多功能于一体,具有自动化程度高、辅助用工少且强度低、栽植质量高、地头转弯灵活等优点。
附图说明
8.下面结合附图对本发明作进一步说明。
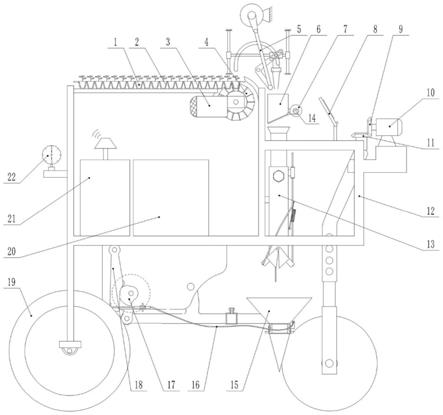
9.图1是本发明实施例的结构示意图。
10.图2是本发明实施例中取苗机构的结构示意图。
11.图3是本发明实施例中存苗桶的结构示意图。
12.图4是本发明实施例中导苗桶的结构示意图。
13.图5是图4的俯视示意图。
14.图6是本发明实施例中栽植机构的结构示意图。
15.附图标记:1、钵苗;2、穴盘;3、送苗电机;4、送苗轮;4
‑
1、型槽;5、取苗机构;5
‑
1、取苗电机;5
‑
2、曲柄;5
‑
3、导槽;5
‑
4、摆杆;5
‑
5、夹爪;5
‑
6、连杆;5
‑
7、导块; 5
‑
8、水平导轨;5
‑
9、滑块;5
‑
10、竖直导轨;6、投苗机构;6
‑
1、存苗桶;6
‑
2、挡苗板;7、投苗电机;8、控制面板;9、锥齿轮一;10、转向电机;11、锥齿轮二;12、机架;13、导苗桶;13
‑
1、上部导苗桶;13
‑
2、下部导苗桶;13
‑
3、滑杆;13
‑
4、拉簧;13
‑
5、投苗瓣;13
‑
6、挡针;13
‑
7、安装块;13
‑
8、连接杆;14、第一凸轮;15、栽植机构;15
‑
1、栽植电机;15
‑
2、曲柄一;15
‑
3、连杆;15
‑
4、曲柄二;15
‑
5、栽植器;16、拉线;17、第二凸轮;18、拉杆;19、行走轮;20、电池箱;21、主控箱;22、罗盘。
具体实施方式实施例
16.本实施例中,蔬菜采用穴盘育苗的方式进行栽植,穴盘育苗是现代农业生产主流生产方式,能够快捷和大批量生产蔬菜和花卉,穴盘育苗是在在育苗穴盘中培育幼苗,具有以下优点:节省种子用量,降低生产成本;出苗整齐,保持植物种苗生长的一致性;移栽时不损伤根系,缓苗迅速,成活率高等。
17.本实施例的设施电动蔬菜移栽机,如图1
‑
6所示,包括送苗机构3、取苗机构5、投苗机构6和栽植机构15。
18.如图1所示,所述送苗机构3包括安装在机架12上的送苗轮4以及驱动所述送苗轮4旋转的送苗电机3,所述送苗轮4的外周设有若干与具有多个钵苗存储位的穴盘2相匹配的型槽4
‑
1,所述型槽4
‑
1的截面与钵苗的形状和大小均相匹配,所述型槽4
‑
1沿送苗轮的轴向延伸。在使用时,带有钵苗1的穴盘2被放置到送苗轮4的型槽4
‑
1内,通过送苗电机3带动送苗轮4中的穴盘2间歇送苗,通过送苗轮4旋转间歇送苗,使得穴盘进给定位准确,减少取苗机构误伤钵苗。
19.如图1和图2所示,所述取苗机构5包括导槽5
‑
3、夹爪5
‑
5、曲柄5
‑
2、连杆5
‑
6、摆杆5
‑
4、水平导轨5
‑
8、滑块5
‑
9和竖直导轨5
‑
10,所述导槽5
‑
3固定在机架12上并呈弧形,导槽5
‑
3的两端部分别记为左侧和右侧。所述导槽5
‑
3内设有可沿该导槽滑动的导块5
‑
7;所述曲柄5
‑
2由取苗电机5
‑
1驱动,所述曲柄5
‑
2远离取苗电机5
‑
1的一端与连杆5
‑
6的一端铰接,所述连杆5
‑
6的另一端与摆杆5
‑
4铰接,所述摆杆5
‑
4远离连杆5
‑
6的一端设有沿其长度方向延伸的腰形孔,所述导块5
‑
7插入腰形孔内并可沿腰形孔滑动。所述竖直导轨5
‑
10设置在机架上,所述滑块5
‑
9与竖直导轨5
‑
10形成移动副,所述水平导轨5
‑
8与滑块5
‑
9固接,所述水平导轨5
‑
8与导块5
‑
7形成移动副,所述夹爪5
‑
5固定在导块5
‑
7上,使得导块5
‑
7沿导槽5
‑
3滑动时夹爪5
‑
5始终保持竖直状态。
20.在使用时,取苗电机5
‑
1驱动曲柄5
‑
2,通过连杆5
‑
6带动摆杆5
‑
4和夹爪5
‑
5在导槽5
‑
3内往复运动,当夹爪5
‑
5运动至左侧时,主控箱21控制夹爪5
‑
5内的电机带动取苗针实现加持动作,当夹爪5
‑
5运动至右侧时,主控箱21控制夹爪5
‑
5内的电机带动取苗针实现放苗动作,夹爪5
‑
5如何实现取苗和放苗动作均为现有技术,可参考相关文献,不再赘述。
21.如图1和图3
‑
5所示,所述投苗机构6包括存苗桶6
‑
1、导苗桶13和投苗瓣13
‑
5,所述存苗桶6
‑
1具有至少两个钵苗存储位,所述存苗桶6
‑
1的底部在每个钵苗存储位处设有挡苗板6
‑
2,所述挡苗板6
‑
2与存苗桶6
‑
1枢接,每个挡苗板6
‑
2的下方设有与该挡苗板6
‑
2对应的第一凸轮14,所述第一凸轮14可在投苗电机7的驱动下旋转从而使得挡苗板按顺序间歇打开。优选的,如图1所示,多个第一凸轮14具有同样的形状,但具有不同的安装角度,这样投苗电机7转动时,就带动第一凸轮14打开不同的挡苗板6
‑
2,从而释放不同钵苗存储位的钵苗至下方的导苗桶13内。
22.如图1和图4
‑
5所示,所述导苗桶13设置在存苗桶6
‑
1的正下方,所述导苗桶13的顶部设有与存苗桶6
‑
1形状相匹配的锥形开口(即锥形开口能够接住从存苗桶6
‑
1释放的所有钵苗,从而具有钵苗多取暂存功能,缓解取苗频率,避免漏取、伤苗现象),所述投苗瓣13
‑
5设置在导苗桶13的底部开口处,所述投苗瓣由可绕设置在机架上的支点旋转的至少两个瓣状投苗板构成,所述投苗瓣13
‑
5具有打开和闭合两种工作状态。
23.如图1和图6所示,所述栽植机构15包括由栽植电机15
‑
1驱动的栽植器15
‑
5,所述栽植器15
‑
5具有接苗工作位置以及栽植工作位置,所述接苗工作位置位于投苗瓣的正下方;在工作时,所述夹爪具有与送苗轮的型槽相对应的取苗工作位置,以及与存苗桶相对应的投苗工作位置。
24.本实施例中,整机采用电驱动(通过电池箱20供电),绿色环保,动作配合精准协调。
25.需要说明的是:现有技术中,栽植机构15、投苗机构6均具有多种实施方式。优选的,本实施中投苗机构6采用以下方式:如图4和图5所示,所述导苗桶13的一侧固接有安装块13
‑
7,所述安装块13
‑
7上设有通孔以及可沿通孔滑动的滑杆13
‑
3,所述滑杆13
‑
3的底部设有分别与投苗瓣的瓣状投苗板一一对应的连接杆13
‑
8,所述滑杆13
‑
3与导苗桶13之间设有复位弹簧;所述投苗瓣13
‑
5上设有向下延伸的挡针13
‑
6,所述挡针与所述栽植器的位置相匹配,在使用时,当所述栽植器15
‑
5移动至挡针13
‑
6处移动至挡针处时,驱动设有挡针的瓣状投苗板绕支点旋转,并在滑杆的带动下打开投苗瓣。
26.进一步地,为了适应不同的投苗高度,本实施例中导苗桶13分成上部导苗桶13
‑
1和下部导苗桶13
‑
2两部分,下部导苗桶13
‑
2固定在机架上,上部导苗桶13
‑
1插入到下部导苗桶13
‑
2内,所述上部导苗桶13
‑
1和下部导苗桶13
‑
2可调式固定在一起,所述安装块13
‑
7固定设置在下部导苗桶13
‑
2上。在使用时,当钵苗1被放入投苗机构6后,投苗电机7上按角度均匀布置的多个凸轮随投苗电机7转动按顺序间歇打开挡苗板6
‑
2,钵苗逐棵落入导苗桶13;调节导苗桶13的连接螺栓实现上部导苗桶13
‑
1和下部苗桶13
‑
2的接苗高度变化。
27.优选的,本实施中栽植机构15采用以下方式:如图1和图6所示,所述栽植机构15包括设置在机架12上并由栽植电机15
‑
1驱动的双曲柄机构(该双曲柄机构包括曲柄一15
‑
2、连杆15
‑
3和曲柄二15
‑
4),所述栽植器15
‑
5安装在双曲柄机构的连杆15
‑
3上,通过合理调整曲柄一15
‑
2、连杆15
‑
3和曲柄二15
‑
4的参数,使得所述栽植器的运动轨迹为余摆线,这样钵苗栽后立直率高,且栽植器为鸭嘴状可适应裸地移栽和膜上移栽两种工况。所述栽植电机的输出轴上还安装有第二凸轮17,所述机架12上铰接有与第二凸轮17相配合的拉杆18,所述拉杆18与用于打开或闭合栽植器的拉线16相连接;所述第二凸轮17在栽植器运动至最低段时,推动拉杆18带动拉线16打开栽植器15
‑
5。本实施例中,在投苗机构6中的钵苗1落入导苗桶13后,栽植器15
‑
5在栽植电机15
‑
1的驱动下做余摆线运动,当栽植器15
‑
5向上接苗运动至与挡针13
‑
6接触,投苗瓣13
‑
5通过滑杆13
‑
3克服拉簧13
‑
4的阻力绕支点旋转被强制打开,钵苗1落入栽植器15
‑
5内。栽植器15
‑
5继续运动插入地面时,凸轮17推动拉杆18拉动拉线16打开栽植器15
‑
5,钵苗1被栽入土中,完成移栽工作。
28.本实施例还可以作以下改进:1)为了提高取苗机构的取苗效率,每个穴盘只有一排钵苗存储位,所述存苗桶6
‑
1具有与穴盘同样数量的钵苗存储位,这样取苗机构一次可取苗整个穴盘的钵苗。
29.2)如图1所示,所述机架12的底部设有行走轮19,其中左侧为驱动轮,右侧为转向轮。
30.3)所述机架12上安装有用于监测行进方向的罗盘22,可采用电磁罗盘。罗盘22与主控箱21实时通讯,当罗盘22监测到机器前进方向偏离时向主控箱21发出信号,主控箱21接收信号控制转向电机10转动齿轮组(包括锥齿轮一9和锥齿轮二11),从而控制转向轮实现机器前进方向的调整,达到移栽机自动直线移栽的作业效果。
31.本发明集自动取苗、定植、直线行驶等功能于一体,具有自动化程度高、辅助用工少且强度低、栽植质量高、地头转弯灵活等优点。
32.本发明不局限于上述实施例所述的具体技术方案,除上述实施例外,本发明还可以有其他实施方式。对于本领域的技术人员来说,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等形成的技术方案,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1