一种基于物联网防走偏的机器人及其使用方法与流程
1.本发明涉及机器人领域,具体是一种基于物联网防走偏的机器人及其使用方法。
背景技术:
2.机器人是一种广义范围的称呼,包括各种能够实现某一功能的机械装置。
3.在大棚种植过程中,需要对农作物进行喷洒农药,现有的喷洒方式有人工背着药水箱进行喷洒。
4.显然,通过人工喷洒药水的方式,劳动量大,费时费力,工作效率低;因此,针对上述问题提出一种基于物联网防走偏的机器人及其使用方法。
技术实现要素:
5.为了弥补现有技术的不足,解决通过人工喷洒药水的方式,劳动量大,费时费力,工作效率低的问题,本发明提出一种基于物联网防走偏的机器人及其使用方法。
6.本发明解决其技术问题所采用的技术方案是:本发明所述的一种基于物联网防走偏的机器人,包括底座、箱体和喷洒机构;所述箱体设置在底座的顶部;所述箱体的顶部设置有进料管;所述底座的底部设置有车轮;所述喷洒机构设置在箱体的两侧;所述喷洒机构包括水泵和雾化喷头;所述箱体的侧壁固接有两块一号支撑板,且两块一号支撑板关于箱体的中心呈对称设置;所述水泵安装在一号支撑板的顶部;所述水泵的一端通过软管与箱体内部连通,另一端通过软管与雾化喷头连接;工作时,先将本机器人移动到大棚内的中间小道上,通过进料管往箱体内部加入农药和清水,启动水泵,使得水泵将箱体内部的药水沿着软管抽出,并且通过雾化喷头喷出,实现对农作物的喷洒,此时机器人底部的车轮将带动机器人移动,增大对农作物的喷洒范围,使得大棚内的农作物均能够接触到农药,提高对农作物的除虫效果,工作效率高。
7.优选的,所述箱体的顶部固接有二号支撑板;所述二号支撑板的顶部固接有顶板;所述顶板的底部固接有伺服电机;所述伺服电机的输出轴固接有搅拌杆,且搅拌杆的底端位于箱体内部;所述搅拌杆的外壁固接有搅拌叶片;工作时,当农药和清水从进料管进入箱体内部后,启动伺服电机,使得伺服电机带动搅拌杆转动,使得搅拌杆带动搅拌叶片转动,能够充分搅拌箱体内部的清水和农药,使得不同种类的农药、清水和农药能够充分混合,进而使得混合液充分均匀,有利于提高除虫效果。
8.优选的,所述搅拌杆位于箱体外部的一端套设且固接有一号带轮;所述一号带轮的外周开设有两个皮带槽;所述顶板的底部通过轴承转动连接有一号杆;所述一号杆的外壁套设且固接有二号带轮;所述一号带轮与二号带轮之间通过皮带连接;所述一号杆的底端固接有l形杆,且l形杆的另一端与雾化喷头的一侧固接;工作时,当伺服电机带动搅拌杆转动后,将使得一号带轮产生转动,通过皮带的作用,将使得二号带轮和一号杆产生转动,而一号杆带动l形杆转动,l形杆也将带动雾化喷头产生180
°
的转动,能够增大对同一位置农作物的喷洒范围,使得农作物均能够喷到农药。
9.优选的,所述搅拌杆的底端套设且固接有凸轮;所述箱体的底部内侧壁铰接有两块一号板,且两块一号板对称设置在搅拌杆的两侧;所述一号板远离搅拌杆的一侧固接有一号弹簧,且一号弹簧的另一端固接在箱体的底部内侧壁;工作时,当伺服电机带动搅拌杆转动后,将使得搅拌杆底端的凸轮产生转动,凸轮将挤压一号板,使得一号板围绕着其铰接点转动,同时使得一号弹簧受到压缩,当凸轮开始离开一号板后,由于一号弹簧的弹力,又将使得一号板回到初始位置,对箱体底部的混合液具有搅拌的效果,能够使得混合液的成分更为均匀。
10.优选的,所述底座的顶部开设有凹槽,且所述凹槽的截面呈t字形;所述凹槽内滑动连接有三号支撑板;所述三号支撑板的底部固接二号弹簧,且二号弹簧的底端固接在凹槽的底部;所述三号支撑板的顶部与箱体的底部固接;工作时,由于本机器人在移动时,可能会遇到颠簸的路况,将使得三号支撑板在凹槽内上下滑动,由于二号弹簧的设置,具有较好的缓冲作用,能够降低箱体、水泵和伺服电机受到的震动,具有较好的减震效果。
11.优选的,所述顶板的顶部安装有gps定位仪和控制装置;所述gps定位仪与控制装置电性连接;所述车轮由动力装置驱动,且动力装置也由控制装置控制;工作时,gps定位仪能够实时监控本机器人的位置,当本机器人的路径产生偏移时,gps定位仪会将信息传递到控制装置中,控制装置控制动力装置运作,使得车轮的方向回到初始位置,能够避免本机器人的移动路径产生偏移;其中动力装置与电动车的动力组件构成相同。
12.优选的,所述二号支撑板的侧壁固接有矩形壳体;所述一号带轮和二号带轮以及皮带位于矩形壳体内部;工作时,矩形壳体的设置,使得一号带轮和二号带轮以及皮带位于其内部,能够避免灰尘等杂质落在一号带轮和二号带轮以及皮带的表面,减少外界因素对一号带轮和二号带轮以及皮带的破坏。
13.一种基于物联网防走偏的机器人的使用方法,该方法适用于上述中任意所述的基于物联网防走偏的机器人,其特征在于:该方法包括以下步骤:s1:先将机器人移动到大棚内的中间小道上,并且往箱体内部加入农药和清水,通过启动伺服电机,实现对箱体内部混合液的搅拌。
14.s2:伺服电机带动一号带轮转动,使得一号杆转动,进而使得雾化喷头通过l形杆产生180
°
转动;s3:通过启动水泵,将箱体内部的药水从雾化喷头喷出,实现对农作物的喷洒,同时机器人底部的车轮将带动机器人移动。
15.本发明的有益之处在于:1.本发明设置了喷洒机构,在对农作物进行施药时,先将本机器人移动到大棚内的中间小道上,通过水泵将箱体内部的药水沿着软管抽出,并且通过雾化喷头喷出,实现对农作物的喷洒,同时机器人底部的车轮将带动机器人移动,增大对农作物的喷洒范围,使得大棚内的农作物均能够接触到农药,提高对农作物的除虫效果,节省了人力,工作效率高。
16.2.本发明设置了伺服电机、搅拌杆、搅拌叶片、凸轮、一号板和一号弹簧,伺服电机通过带动搅拌杆转动,实现对箱体内部清水和农药的充分搅拌,同时箱体底部也将受到一号板左右摆动的作用,有利于充分搅拌箱体底部的混合液,能够使得混合液的成分更为均匀,提高对农作物的除虫效果。
附图说明
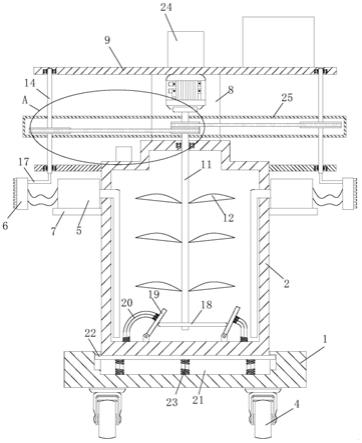
17.图1为实施例一的局部剖面结构示意图;图2为图1中a区域局部放大图;图3为实施例一中箱体顶部的部分结构示意图;图4为本发明的方法流程图;图5为实施例二附图。
18.图中:1、底座;2、箱体;3、进料管;4、车轮;5、水泵;6、雾化喷头;7、一号支撑板;8、二号支撑板;9、顶板;10、伺服电机;11、搅拌杆;12、搅拌叶片;13、一号带轮;14、一号杆;15、二号带轮;16、皮带;17、l形杆;18、凸轮;19、一号板;20、一号弹簧;21、凹槽;22、三号支撑板;23、二号弹簧;24、gps定位仪;25、矩形壳体;26、导杆;27、导向孔。
具体实施方式
19.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
20.实施例一请参阅图1-4所示,一种基于物联网防走偏的机器人,包括底座1、箱体2和喷洒机构;所述箱体2设置在底座1的顶部;所述箱体2的顶部设置有进料管3;所述底座1的底部设置有车轮4;所述喷洒机构设置在箱体2的两侧;所述喷洒机构包括水泵5和雾化喷头6;所述箱体2的侧壁固接有两块一号支撑板7,且两块一号支撑板7关于箱体2的中心呈对称设置;所述水泵5安装在一号支撑板7的顶部;所述水泵5的一端通过软管与箱体2内部连通,另一端通过软管与雾化喷头6连接;工作时,先将本机器人移动到大棚内的中间小道上,通过进料管3往箱体2内部加入农药和清水,启动水泵5,使得水泵5将箱体2内部的药水沿着软管抽出,并且通过雾化喷头6喷出,实现对农作物的喷洒,此时机器人底部的车轮4将带动机器人移动,增大对农作物的喷洒范围,使得大棚内的农作物均能够接触到农药,提高对农作物的除虫效果。
21.所述箱体2的顶部固接有二号支撑板8;所述二号支撑板8的顶部固接有顶板9;所述顶板9的底部固接有伺服电机10;所述伺服电机10的输出轴固接有搅拌杆11,且搅拌杆11的底端位于箱体2内部;所述搅拌杆11的外壁固接有搅拌叶片12;工作时,当农药和清水从进料管3进入箱体2内部后,启动伺服电机10,使得伺服电机10带动搅拌杆11转动,使得搅拌杆11带动搅拌叶片12转动,能够充分搅拌箱体2内部的清水和农药,使得不同种类的农药、清水和农药能够充分混合,进而使得混合液充分均匀,有利于提高除虫效果。
22.所述搅拌杆11位于箱体2外部的一端套设且固接有一号带轮13;所述一号带轮13的外周开设有两个皮带16槽;所述顶板9的底部通过轴承转动连接有一号杆14;所述一号杆14的外壁套设且固接有二号带轮15;所述一号带轮13与二号带轮15之间通过皮带16连接;所述一号杆14的底端固接有l形杆17,且l形杆17的另一端与雾化喷头6的一侧固接;工作时,当伺服电机10带动搅拌杆11转动后,将使得一号带轮13产生转动,通过皮带16的作用,将使得二号带轮15和一号杆14产生转动,而一号杆14带动l形杆17转动,l形杆17也将带动
雾化喷头6产生180
°
的转动(伺服电机10正反转,每次转动180
°
),能够增大对同一位置农作物的喷洒范围,使得农作物均能够喷到农药。
23.所述搅拌杆11的底端套设且固接有凸轮18;所述箱体2的底部内侧壁铰接有两块一号板19,且两块一号板19对称设置在搅拌杆11的两侧;所述一号板19远离搅拌杆11的一侧固接有一号弹簧20,且一号弹簧20的另一端固接在箱体2的底部内侧壁;工作时,当伺服电机10带动搅拌杆11转动后,将使得搅拌杆11底端的凸轮18产生转动,凸轮18将挤压一号板19,使得一号板19围绕着其铰接点转动,同时使得一号弹簧20受到压缩,当凸轮18开始离开一号板19后,由于一号弹簧20的弹力,又将使得一号板19回到初始位置,对箱体2底部的混合液具有搅拌的效果,能够使得混合液的成分更为均匀。
24.所述底座1的顶部开设有凹槽21,且所述凹槽21的截面呈t字形;所述凹槽21内滑动连接有三号支撑板22;所述三号支撑板22的底部固接二号弹簧23,且二号弹簧23的底端固接在凹槽21的底部;所述三号支撑板22的顶部与箱体2的底部固接;工作时,由于本机器人在移动时,可能会遇到颠簸的路况,将使得三号支撑板22在凹槽21内上下滑动,由于二号弹簧23的设置,具有较好的缓冲作用,能够降低箱体2、水泵5和伺服电机10受到的震动,具有较好的减震效果。
25.所述顶板9的顶部安装有gps定位仪24和控制装置;所述gps定位仪24与控制装置电性连接;所述车轮4由动力装置驱动,且动力装置也由控制装置控制;工作时,gps定位仪24能够实时监控本机器人的位置,当本机器人的路径产生偏移时,gps定位仪24会将信息传递到控制装置中,控制装置控制动力装置运作,使得车轮4的方向回到初始位置,能够避免本机器人的移动路径产生偏移;其中动力装置与电动车的动力组件构成相同;控制装置与互联网连接,可通过软件远程控制机器人的工作。
26.所述二号支撑板8的侧壁固接有矩形壳体25;所述一号带轮13和二号带轮15以及皮带16位于矩形壳体25内部;工作时,矩形壳体25的设置,使得一号带轮13和二号带轮15以及皮带16位于其内部,能够避免灰尘等杂质落在一号带轮13和二号带轮15以及皮带16的表面,减少外界因素对一号带轮13和二号带轮15以及皮带16的破坏。
27.一种基于物联网防走偏的机器人的使用方法,该方法适用于上述中任意所述的基于物联网防走偏的机器人,其特征在于:该方法包括以下步骤:s1:先将机器人移动到大棚内的中间小道上,并且往箱体2内部加入农药和清水,通过启动伺服电机10,实现对箱体2内部混合液的搅拌。
28.s2:伺服电机10带动一号带轮13转动,使得一号杆14转动,进而使得雾化喷头6通过l形杆17产生180
°
转动;s3:通过启动水泵5,将箱体2内部的药水从雾化喷头6喷出,实现对农作物的喷洒,同时机器人底部的车轮4将带动机器人移动。
29.实施例二请参阅图5所示,对比实施例一,作为本发明的另一种实施方式,所述三号支撑板22的底部固接有导杆26;所述凹槽21的底部开设有导向孔27;所述导杆26与导向孔27呈滑动配合状态;工作时,当三号支撑板22在凹槽21内部上下滑动时,将使得导杆26沿着导向孔27滑动,具有较好的导向作用,提高三号支撑板22滑动的平稳性。
30.工作原理:先将本机器人移动到大棚内的中间小道上,通过进料管3往箱体2内部
加入农药和清水,启动伺服电机10,使得伺服电机10带动搅拌杆11转动,使得搅拌杆11带动搅拌叶片12转动,能够充分搅拌箱体2内部的清水和农药,使得不同种类的农药、清水和农药能够充分混合;通过伺服电机10带动搅拌杆11转动后,将使得搅拌杆11底端的凸轮18产生转动,凸轮18将挤压一号板19,使得一号板19围绕着其铰接点转动,同时使得一号弹簧20受到压缩,当凸轮18开始离开一号板19后,由于一号弹簧20的弹力,又将使得一号板19回到初始位置,对箱体2底部的混合液具有搅拌的效果,能够使得混合液的成分更为均匀;启动水泵5,使得水泵5将箱体2内部的药水沿着软管抽出,并且通过雾化喷头6喷出,实现对农作物的喷洒,此时机器人底部的车轮4将带动机器人移动,增大对农作物的喷洒范围;且当伺服电机10带动搅拌杆11转动后,将使得一号带轮13产生转动,通过皮带16的作用,将使得二号带轮15和一号杆14产生转动,而一号杆14带动l形杆17转动,l形杆17也将带动雾化喷头6产生180
°
的转动,能够增大对同一位置农作物的喷洒范围,使得农作物均能够喷到农药。
31.当机器人遇到颠簸的路况后,将使得三号支撑板22在凹槽21内上下滑动,由于二号弹簧23的设置,具有较好的缓冲作用,能够降低箱体2、水泵5和伺服电机10受到的震动;gps定位仪24能够实时监控本机器人的位置,当本机器人的路径产生偏移时,gps定位仪24会将信息传递到控制装置中,控制装置控制动力装置运作,使得车轮4的方向回到初始位置,能够避免本机器人的移动路径产生偏移;其中动力装置与电动车的动力组件构成相同。
32.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1