一种侧悬挂拔取式胡萝卜收获装置
1.本发明涉及农业机械技术领域,具体涉及一种侧悬挂拔取式胡萝卜收获装置。
背景技术:
2.我国胡萝卜的种植面积和产量均居世界前列,随着种植技术的不断成熟、市场价格高且平稳,出口量日益增加,种植收益增长明显,胡萝卜正在形成规模化种植。
3.但胡萝卜在采收过程和后期加工过程,大多采用人工或简易采收机进行采收,机械化水平却非常低,国外收获设备不适合国内大面积推广,导致效率低下。随着技术的发展以及胡萝卜的规模化种植,胡萝卜的收获也在逐渐实现机械化。
4.中国发明专利cn109479490a说明书公开了胡萝卜收获机用植株夹拔输送与根秧切割分离一体化装置,该装置通过挖掘铲将胡萝卜铲松,之后胡萝卜植株由植株夹拔输送组件夹持拔起后向后上方夹持输送,当输送到切割组件的位置时,在高速旋转的锯齿圆盘刀的作用下完成胡萝卜的齐茬切割,根秧分离后的胡萝卜落到下方的输送集收装置上,经输送和提升后落入到集收袋中,切割的秧叶则由夹持输送带抛入田间,完成整个收获过程。该装置存在如下问题:(1)植株夹拔输送组件倾斜设置,长度较长,设备的体积较大,作业的灵活性比较差;(2)收获后胡萝卜凌乱,需要人工重新摆放装箱。
技术实现要素:
5.针对现有技术中的缺陷,本发明提供了一种侧悬挂拔取式胡萝卜收获装置,以至少解决上述问题之一。
6.本发明提供了一种侧悬挂拔取式胡萝卜收获装置,包括机架、松土机构、卷叶扶正机构、夹持传送机构、切割机构、传送轨道和排叶槽;
7.所述松土机构设于机架前下方,用于对垄上的胡萝卜进行松土;
8.所述卷叶扶正机构设于机架的底部并接在松土机构的后方,用于对松土后的胡萝卜的茎叶进行夹持扶正;
9.所述夹持传送机构包括底部弧形传送段、后部竖向传送段、顶部弧形传送段和前部竖向传送段,所述底部弧形传送段设于机架的后部下侧并接在卷叶扶正机构的后方,所述后部竖向传送段设于机架的后侧,所述顶部弧形传送段设于机架的顶部,所述前部竖向传送段设于机架的前侧,底部弧形传送段、后部竖向传送段、顶部弧形传送段和前部竖向传送段依次相接,经卷叶扶正机构夹持扶正后的胡萝卜的茎叶送入底部弧形传送段,并依次通过底部弧形传送段、后部竖向传送段、顶部弧形传送段和前部竖向传送段夹持传送;
10.所述切割机构设于所述前部竖向传送段的前侧,用于将传送经过前部竖向传送段的胡萝卜的茎叶和根部割断;
11.所述传送轨道设于所述切割机构前侧的下方,用于承接并传送出被切下的胡萝卜根部;
12.所述排叶槽设于所述前部竖向传送段的下方,用于承接并排除被切下的胡萝卜茎
叶。
13.进一步地,所述机架的前部下侧设有传动箱,所述卷叶扶正机构包括两个对称设置的扶正单体,每个所述扶正单体包括固定于所述传动箱下侧的第一安装架、转动安装于第一安装架上的四个第一带轮以及套设于四个所述第一带轮外的第一传送带,两个所述扶正单体的第一传送带在前部形成v形导入口;
14.所述传动箱内设有第一传动机构,一电机通过第一传动机构带动两个扶正单体的第一带轮转动,以驱动两个扶正单体的第一传送带相对内侧向后同步转动。
15.进一步地,所述传动箱的左右两侧对称固定有两个向前下方斜向延伸的传动臂,所述松土机构包括两个对称设置的开沟盘,每个所述开沟盘分别通过转轴安装于对应的一个传动臂的末端;
16.两个所述传动臂上均安装有第二传动机构,所述第一传动机构通过两所述第二传动机构带动两开沟盘同步转动。
17.进一步地,所述第一传动机构包括一个大锥齿轮、一个第一小锥齿轮、一个第一齿轮、两个第二齿轮和三个第三齿轮,所述大锥齿轮通过轮轴安装于传动箱内的后侧并通过电机驱动,所述第一小锥齿轮和第一齿轮通过轮轴同轴安装于传动箱内的下侧,第一小锥齿轮与大锥齿轮啮合,两个所述第二齿轮和一个第三齿轮分别通过轮轴安装于传动箱内的下侧,另外两个第三齿轮分别同轴固定于两个所述扶正单体的任一第一带轮的上端,两个第二齿轮均啮合于第一齿轮,固定于一第一带轮上端的第三齿轮啮合于一第二齿轮,安装于传动箱下侧的第三齿轮啮合于另一第二齿轮,固定于另一第一带轮上端的第三齿轮啮合安装于传动箱下侧的第二齿轮;
18.所述第二传动机构包括第二小锥齿轮、第一皮带轮、第二皮带轮和皮带,所述第二小锥齿轮通过轮轴安装于传动箱内,第二小锥齿轮与大锥齿轮啮合,所述第一皮带轮设于传动臂内并同轴固定于所述第二小锥齿轮的轮轴上,所述第二皮带轮设于传动臂内并同轴固定于所述开沟盘的转轴上,所述皮带套在所述第一皮带轮和第二皮带轮外。
19.进一步地,所述底部弧形传送段和顶部弧形传送段均由左右对称设置的两对动力滚筒输送机构成,所述后部竖向传送段和前部竖向传送段由左右对称设置的两对皮带输送机构成,每对所述动力滚筒输送机之间和每对所述皮带输送机之间形成夹持输送通道。
20.进一步地,所述动力滚筒输送机包括弧形支架和多个电动滚筒,所述弧形支架固定于所述机架上,多个所述电动滚筒呈弧形排布固定于所述弧形支架上。
21.进一步地,所述皮带输送机包括固定于所述机架上的第二安装架、转动安装于第二安装架上的四个第二带轮、套设于四个所述第二带轮外的第二传送带和若干张紧机构,一电机与各皮带输送机的任一第二带轮传动连接,用以驱动各皮带输送机的第二传送带转动,所述张紧机构包括第一连杆、第二连杆、伸缩杆和张紧轮,所述第一连杆的一端铰接于第二安装架,所述第二连杆的一端铰接于所述第一连杆的另一端,所述伸缩杆的两端分别铰接于所述第二连杆的中部和第二安装架,伸缩杆上套有支撑于第二安装架和第二连杆之间的弹簧,所述张紧轮安装于所述第二连杆的另一端并抵紧在第二传送带内侧的侧边外。
22.进一步地,沿所述夹持传送机构的外侧设有侧挡板,所述侧挡板固定在机架上,侧挡板上设有沿所述夹持传送机构延伸、并与该夹持传送机构的夹持输送通道对准的导槽。
23.进一步地,所述后部竖向传送段的侧挡板外相对于导槽对称设置有两组毛刷辊。
24.进一步地,所述切割机构包括固定锯齿、滑动锯齿和凸轮,所述固定锯齿横向设置在所述前部竖向传送段的前侧并固定于机架上,所述滑动锯齿沿横向滑动安装于所述固定锯齿,固定锯齿和滑动锯齿的锯齿朝上并齐平,所述凸轮转动安装于机架上并通过一电机驱动,凸轮上偏心设置有一凸轴,所述滑动锯齿上设有凸轴配合部,所述凸轴与所述凸轴配合部相连,以使凸轮转动时通过凸轴带动滑动锯齿左右往复滑动。
25.本发明的有益效果体现在:
26.本技术收获胡萝卜时,首先通过松土机构对垄上的胡萝卜进行松土,随着胡萝卜收获装置的前进,松土后的胡萝卜的茎叶进入卷叶扶正机构,并通过卷叶扶正机构夹持扶正,使得胡萝卜的茎叶保持竖直,经卷叶扶正机构扶正后的胡萝卜的茎叶送入底部弧形传送段,底部弧形传送段向斜上方夹紧传送胡萝卜的茎叶,使得松土后的胡萝卜被拔起,被拔起的胡萝卜依次经过底部弧形传送段、后部竖向传送段、顶部弧形传送段和前部竖向传送段夹持传送,当胡萝卜传送到切割机构时,切割机构将胡萝卜的茎叶和根部割断,被切下的胡萝卜根部落在传送轨道上并通过传送轨道传走装箱,被切下的胡萝卜茎叶则继续通过前部竖向传送段向下传送至排叶槽,最后通过排叶槽排出。
27.相对于现有技术,本技术由底部弧形传送段、后部竖向传送段、顶部弧形传送段和前部竖向传送段组合的夹持传送机构夹持传送胡萝卜,整个夹持传送机构更加小型紧凑,有利于设备的小型化,作业更加灵活,并且,切割机构割断胡萝卜的茎叶和根部时,胡萝卜的根部处于水平位置,胡萝卜的根部被切下后平放在传送轨道上,并通过传送轨道逐个整齐传走,有利于后续的胡萝卜装箱。
附图说明
28.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
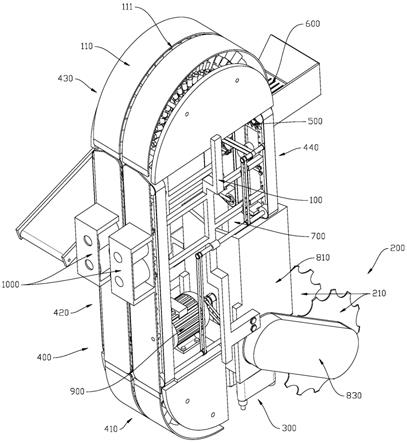
29.图1为本发明实施例的立体结构示意图;
30.图2为本发明实施例的正视图;
31.图3为图2的a-a剖视图;
32.图4为本发明实施例的松土机构和卷叶扶正机构的传动结构示意图;
33.图5为本发明实施例的夹持传送机构的结构示意图;
34.图6为本发明实施例的皮带输送机的结构示意图;
35.图7为本发明实施例的切割机构的结构示意图。
36.附图中,100-机架;110-侧挡板;111-导槽;200-松土机构;210-开沟盘;300-卷叶扶正机构;310-第一安装架;320-第一带轮;330-第一传送带;331-v形导入口;400-夹持传送机构;410-弧形传送段;420-后部竖向传送段;430-顶部弧形传送段;440-前部竖向传送段;450-动力滚筒输送机;451-底部弧形支架;452-电动滚筒;460-皮带输送机;461-第二安装架;462-第二带轮;463-第二传送带;464-张紧机构;4641-第一连杆;4642第二连杆;4643-伸缩杆;4644-张紧轮;4645-弹簧;500-切割机构;510-固定锯齿;520-滑动锯齿;521-凸轴配合部;530-凸轮;531-凸轴;600-传送轨道;700-排叶槽;810-传动箱;820-第一传动机构;821-大锥齿轮;822-第一小锥齿轮;823-第一齿轮;824-第二齿轮;825-第三齿轮;
830-传动臂;840-第二传动机构;841-第二小锥齿轮;842-第一皮带轮;843-第二皮带轮;844-皮带;900-电机;1000-毛刷辊。
具体实施方式
37.下面将结合附图对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本发明的保护范围。
38.需要注意的是,除非另有说明,本技术使用的技术术语或者科学术语应当为本发明所属领域技术人员所理解的通常意义。
39.如图1-图7所示,本发明实施例提供了一种侧悬挂拔取式胡萝卜收获装置,包括机架100、松土机构200、卷叶扶正机构300、夹持传送机构400、切割机构500、传送轨道600和排叶槽700。
40.松土机构200设于机架100前下方,用于对垄上的胡萝卜进行松土。
41.卷叶扶正机构300设于机架100的底部并接在松土机构200的后方,用于对松土后的胡萝卜的茎叶进行夹持扶正。
42.夹持传送机构400包括底部弧形传送段410、后部竖向传送段420、顶部弧形传送段430和前部竖向传送段440,底部弧形传送段410设于机架100的后部下侧并接在卷叶扶正机构300的后方,后部竖向传送段420设于机架100的后侧,顶部弧形传送段430设于机架100的顶部,前部竖向传送段440设于机架100的前侧,底部弧形传送段410、后部竖向传送段420、顶部弧形传送段430和前部竖向传送段440依次相接,经卷叶扶正机构300夹持扶正后的胡萝卜的茎叶送入底部弧形传送段410,并依次通过底部弧形传送段410、后部竖向传送段420、顶部弧形传送段430和前部竖向传送段440夹持传送。
43.切割机构500设于前部竖向传送段440的前侧,用于将传送经过前部竖向传送段440的胡萝卜的茎叶和根部割断。
44.传送轨道600设于切割机构500前侧的下方,用于承接并传送出被切下的胡萝卜根部。
45.排叶槽700设于前部竖向传送段440的下方,用于承接并排除被切下的胡萝卜茎叶。
46.本技术收获胡萝卜时,首先通过松土机构200对垄上的胡萝卜进行松土,随着胡萝卜收获装置的前进,松土后的胡萝卜的茎叶进入卷叶扶正机构300,并通过卷叶扶正机构300夹持扶正,使得胡萝卜的茎叶保持竖直,经卷叶扶正机构300扶正后的胡萝卜的茎叶送入底部弧形传送段410,底部弧形传送段410向斜上方夹紧传送胡萝卜的茎叶,使得松土后的胡萝卜被拔起,被拔起的胡萝卜依次经过底部弧形传送段410、后部竖向传送段420、顶部弧形传送段430和前部竖向传送段440夹持传送,当胡萝卜传送到切割机构500时,切割机构500将胡萝卜的茎叶和根部割断,被切下的胡萝卜根部落在传送轨道600上并通过传送轨道600传走装箱,被切下的胡萝卜茎叶则继续通过前部竖向传送段440向下传送至排叶槽700,最后通过排叶槽700排出。
47.相对于现有技术,本技术由底部弧形传送段410、后部竖向传送段420、顶部弧形传送段430和前部竖向传送段440组成的夹持传送机构400夹持传送胡萝卜,整个夹持传送机
构400更加小型紧凑,有利于设备的小型化,作业更加灵活,并且,切割机构500割断胡萝卜的茎叶和根部时,胡萝卜的根部处于水平位置,胡萝卜的根部被切下后平放在传送轨道600上,并通过传送轨道600逐个整齐传走,有利于后续的胡萝卜装箱。
48.作为一种具体的实施例,参照图1、图2、图3和图4,机架100的前部下侧设有传动箱810,卷叶扶正机构300包括两个对称设置的扶正单体,每个扶正单体包括固定于传动箱810下侧的第一安装架310、转动安装于第一安装架310上的四个第一带轮320以及套设于四个第一带轮320外的第一传送带330,两个扶正单体的第一传送带330在前部形成v形导入口331。传动箱810内设有第一传动机构820,一电机900通过第一传动机构820带动两个扶正单体的第一带轮320转动,以驱动两个扶正单体的第一传送带330相对内侧向后同步转动。
49.该胡萝卜收获装置行进收获胡萝卜的过程中,电机900通过第一传动机构820带动两个扶正单体的第一传送带330转动,松土后的胡萝卜的茎叶通过两个扶正单体前部形成的v形导入口331导入两个第一传送带330之间,进而对胡萝卜的茎叶进行扶正。
50.并且,传动箱810的左右两侧对称固定有两个向前下方斜向延伸的传动臂830,松土机构200包括两个对称设置的开沟盘210,每个开沟盘210分别通过转轴安装于对应的一个传动臂830的末端。两个传动臂830上均安装有第二传动机构840,第一传动机构820通过两第二传动机构840带动两开沟盘210同步转动。
51.收获胡萝卜的过程中,电机900通过第一传动机构820带动两个扶正单体的第一传送带330转动,同时第一传动机构820会通过第二传动机构840带动两侧的开沟盘210转动,进而通过开沟盘210对垄上的胡萝卜进行松土。
52.本实施例中,参照图4,第一传动机构820包括一个大锥齿轮821、一个第一小锥齿轮822、一个第一齿轮823、两个第二齿轮824和三个第三齿轮825,大锥齿轮821通过轮轴安装于传动箱810内的后侧并通过电机900驱动,第一小锥齿轮822和第一齿轮823通过轮轴同轴安装于传动箱810内的下侧,第一小锥齿轮822与大锥齿轮821啮合,两个第二齿轮824和一个第三齿轮825分别通过轮轴安装于传动箱810内的下侧,另外两个第三齿轮825分别同轴固定于两个扶正单体的任一第一带轮320的上端,两个第二齿轮824均啮合于第一齿轮823,固定于一第一带轮320上端的第三齿轮825啮合于一第二齿轮824,安装于传动箱810下侧的第三齿轮825啮合于另一第二齿轮824,固定于另一第一带轮320上端的第三齿轮825啮合安装于传动箱810下侧的第二齿轮824。
53.第二传动机构840包括第二小锥齿轮841、第一皮带轮842、第二皮带轮843和皮带844,第二小锥齿轮841通过轮轴安装于传动箱810内,第二小锥齿轮841与大锥齿轮821啮合,第一皮带轮842设于传动臂830内并同轴固定于第二小锥齿轮841的轮轴上,第二皮带轮843设于传动臂830内并同轴固定于开沟盘210的转轴上,皮带844套在第一皮带轮842和第二皮带轮843外。
54.采用上述传动方式,电机900带动大锥齿轮821转动时,大锥齿轮821带动第一小锥齿轮822转动,第一齿轮823随小锥齿轮转动,同时带动两个第二齿轮824转动,其中一个第二齿轮824带动一个第三齿轮825转动,进而带动一个扶正单体的第一传送带330转动,另一个第二齿轮824带动另外两个第三齿轮825转动,进而带动另一个扶正单体的第一传送带330向相反的方向转动,从而使得扶正时胡萝卜的茎叶在两个扶正单体的第一传送带330之间传送,与此同时,大锥齿轮821带动两个第二小锥齿轮841转动,每个第一皮带轮842随对
应的第二小锥齿轮841转动,再通过皮带844带动第二皮带轮843,进而带动对应的开沟盘210转动。
55.作为一种具体的实施例,参照图5,底部弧形传送段410和顶部弧形传送段430均由左右对称设置的两对动力滚筒输送机450构成,后部竖向传送段420和前部竖向传送段440由左右对称设置的两对皮带输送机460构成,每对动力滚筒输送机450之间和每对皮带输送机460之间形成夹持输送通道,这样夹持传送机构400的弧形段通过动力滚筒输送机450夹持传送,直线段通过皮带输送机460夹持传送,满足胡萝卜的夹持传送要求。
56.本实施例中,动力滚筒输送机450包括弧形支架451和多个电动滚筒452,弧形支架451固定于机架100上,多个电动滚筒452呈弧形排布固定于弧形支架451上,每个电动滚筒452自带动力。
57.本实施例中,皮带输送机460包括固定于机架100上的第二安装架461、转动安装于第二安装架461上的四个第二带轮462、套设于四个第二带轮462外的第二传送带463和若干张紧机构464,一电机900与各皮带输送机460的任一第二带轮462传动连接,用以驱动各皮带输送机460的第二传送带463转动,张紧机构464包括第一连杆4641、第二连杆4642、伸缩杆4643和张紧轮4644,第一连杆4641的一端铰接于第二安装架461,第二连杆4642的一端铰接于第一连杆4641的另一端,伸缩杆4643的两端分别铰接于第二连杆4642的中部和第二安装架461,伸缩杆4643上套有支撑于第二安装架461和第二连杆4642之间的弹簧4645,张紧轮4644安装于第二连杆4642的另一端并抵紧在第二传送带463内侧的侧边外,张紧轮4644能够在弹簧4645的作用下向内侧挤压第二传送带463,以确保两对皮带输送机460夹持传送胡萝卜时能够将胡萝卜的茎叶夹紧。
58.在一优选的实施例中,参照图1和图2,沿夹持传送机构400的外侧设有侧挡板110,侧挡板110固定在机架100上,侧挡板110上设有沿夹持传送机构400延伸、并与该夹持传送机构400的夹持输送通道对准的导槽111,传送胡萝卜时,胡萝卜的根部被挡在侧挡板110外,胡萝卜的茎叶卡在导槽111内,侧挡板110不仅能够起到挡泥的作用,而且还能够在传送过程中对胡萝卜起到稳定和导向的作用。
59.优选地,后部竖向传送段420的侧挡板110外相对于导槽111对称设置有两组毛刷辊1000,胡萝卜的根部经过两组毛刷辊1000之间时,可通过毛刷辊1000刷掉胡萝卜根部表面的泥土,使得收获的胡萝卜更干净。
60.作为一种具体的实施例,参照图7,切割机构500包括固定锯齿510、滑动锯齿520和凸轮530,固定锯齿510横向设置在前部竖向传送段440的前侧并固定于机架100上,滑动锯齿520沿横向滑动安装于固定锯齿510,固定锯齿510和滑动锯齿520的锯齿朝上并齐平,凸轮530转动安装于机架100上并通过一电机900驱动,凸轮530上偏心设置有一凸轴531,滑动锯齿520上设有凸轴配合部521,凸轴531与凸轴配合部521相连,以使凸轮530转动时通过凸轴531带动滑动锯齿520左右往复滑动。本技术凸轮530驱动滑动锯齿520左右移动,胡萝卜的茎叶与固定锯齿510和滑动锯齿520的锯齿接触后,在固定锯齿510和滑动锯齿520相互剪切的作用下被割断,切割时不会对胡萝卜产生拉拽。
61.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进
行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1