一种茶青精细化采摘机器人的制作方法
1.本发明涉及机器人领域,特别涉及一种茶青精细化采摘机器人。
背景技术:
2.茶叶作为我国一项古老的饮食传统伴随着中华文明的出现而诞生,若从一次偶然的机会解了神农氏尝百草的毒性算起,茶叶至今已有几千年的历史。从秦汉时期到现代中国,从南方的云贵茶山到北地的边茶小镇,茶叶伴随国人的生活跨越了广袤的空间和无尽的岁月。几千年来,中国人一直秉持着种桑养蚕,采茶品茗的传统。但是,由于人口老龄化和居住城镇化的趋势,采茶作为一种传统的获取茶叶的方式正在发生改变。名优茶的制作对茶青的要求甚高,需要做到一芽两叶,一芽一叶,甚至单芽的精细化采摘。据统计,每斤干茶的茶芽数目达数万个。而这样庞大的数目均是人工采摘得到,因此名优茶的采摘需要占用大量的劳动力资源,而每到采茶旺季,往往一工难求。
3.近年来,一些剪式采茶机的出现解决了茶叶生长旺季的批量采茶问题,但是该种方式采的茶叶因为采用了剪切的方式,茶叶的汁液会顺着切口流出,迅速氧化,从而造成品质的下降;同时,该中采茶模式采取的粗犷的模式,里面掺杂了大量的茶树梗和老叶,进一步影响了茶叶的品质,因此该种方式获得的茶叶很难加工成名优茶。与采茶工人每年下降的趋势,国内外市场对茶叶的需求,特别是名优茶的需求保持着持续的增长。因此,出现了采茶工人亟需的问题。
技术实现要素:
4.本发明要解决的技术问题是克服现有技术的缺陷,提供一种茶青精细化采摘机器人。
5.为了解决上述技术问题,本发明提供了如下的技术方案:
6.本发明一种茶青精细化采摘机器人,包括采茶模组、导航模组、换行模组、供电模组、电气驱动模块和安装板,所述安装板的顶端安装有导航模组、换行模组和电气驱动模块,所述导航模组通过立杆安装于安装板的顶端中心处,所述电气驱动模块和换行模组均安装于安装板的顶端,所述安装板的底端安装有采茶模组,所述安装板的底端四角处均安装有行走腿,所述行走腿的底端安装有伺服轮毂,所述行走腿的弯折处安装有供电模组。
7.作为本发明的一种优选技术方案,所述所述采茶模组包括rgb相机、三轴运动模组、采茶头、茶叶临时存储器、集茶器和rgbd相机,所述三轴运动模组包括x轴、y轴和z轴,并均配备有单独的电机进行驱动,所述x轴的两端均设置有y轴,所述x轴的一侧设置有z轴,所述z轴上设置有采茶头连接板,所述采茶头连接板的一侧连接有高度调节杆,所述高度调节杆的外端挂载有rgb相机,所述y轴的一端连接有悬挂杆,所述安装板的底端安装有rgbd相机,且rgbd相机位于悬挂杆的顶部,所述rgb相机集成有激光定位器,所述高度调节杆的底端连接有挂板,所述挂板的底端一侧连接有横向旋转电机,所述横向旋转电机通过传动板连接有纵向旋转电机,所述纵向旋转电机连接有采茶头,所述挂板的底端另一侧安装有竖
直连接板,所述竖直连接板底端连接有茶叶临时存储器,所述集茶器安装于同侧的行走腿之间。
8.作为本发明的一种优选技术方案,所述茶叶临时存储器包括两个并排设置的茶斗,分为粗茶斗和细茶斗,所述茶斗靠近顶端开口处设置有光电传感器,所述茶斗的一侧为开口结构,且安装有滑动挡板,所述滑动挡板的外侧安装有顶块,所述顶块的顶端连接有弹簧杆,且弹簧杆的顶端固定于竖直连接板的外侧,所述集茶器具有多个独立的容腔,分为粗茶集茶器和细茶集茶器,且粗茶集茶器和细茶集茶器之间边沿处设置有顶针。
9.作为本发明的一种优选技术方案,所述导航模组包括导航相机、转向云台和外部保护罩,所述转动云台的顶端安装有导航相机,所述导航相机的外周安装有外部保护罩。
10.作为本发明的一种优选技术方案,所述换行模组的数量为二,并以安装板中分线前后镜像对立设置,所述换行模组包括推杆安装龙门机架、横向电机推杆、横向伸展电机、伸缩支腿电推杆和脚撑板,所述推杆安装龙门机架的两侧均连接有横向电机推杆,所述推杆安装龙门机架的两侧均连接有横向伸展电机,并与横向电机推杆传动连接,所述横向电机推杆的底端连接有伸缩支腿电推杆,所述伸缩支腿电推杆的底端连接有脚撑板。
11.作为本发明的一种优选技术方案,所述电气驱动模块分别对临近的模组进行控制。
12.与现有技术相比,本发明的有益效果如下:
13.1:本发明由机器人的采茶模组中的rgbd相机、rgb相机、三轴运动模组、采茶头等,相互配合,完成对茶青的精细化采摘。
14.2:本发明通过rgbd相机和rgb相机的配合完成对采茶动作的视觉引导。全局检测用的rgbd相机对视野内的茶芽进行全局识别,从而引导三轴运动模组迅速遍历每个采茶点位,到达采茶位后,局部的rgb相机对茶芽和采摘位置进行精定位,从而保证茶芽采摘的成功。
15.3:本发明采摘之后的茶青通过rgb相机二次识别,并根据识别的结果进行精茶和粗茶的分类,从而达到对茶青品质的保证。
16.4:本发明茶青采摘并筛选完成后,将根据茶青的分类,由采茶头放入临近的茶叶临时存储器内,茶叶临时存储器内茶叶集满后,倒入两侧的大的集茶器内,实现了茶青近端跟远端的收集,提升了采茶效率。
17.5:本发明通过多个采茶模组同时工作,能同时覆盖整个茶陇宽度,相比人工采摘具有更大范围覆盖采摘的作用,提升了机器人整体的采茶效率。
18.6:本发明设计的换行模组能够在机器人完成当前茶陇的采摘工作后,与导航相机配合,自动平移到相邻的茶陇,从而实现对整个茶园的自动化采摘。
19.7:本发明有效解决现阶段名优茶采摘人工短缺的问题,降低了茶青采摘的成本,同时使用标准的采摘模式,可以使得采集的茶青鲜叶有统一的标准,从而提高茶的质量。
附图说明
20.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
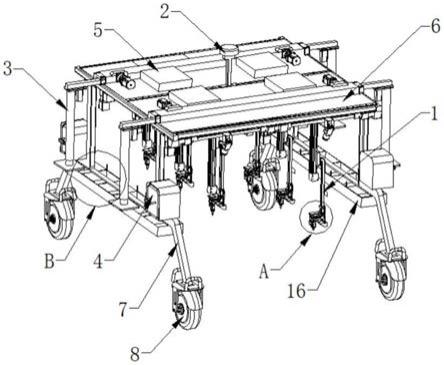
21.图1是本发明的整体结构示意图;
22.图2是本发明的整体结构正视图;
23.图3是本发明的整体结构俯视图;
24.图4是本发明的a部结构放大图;
25.图5是本发明的b部结构放大图;
26.图6是本发明的三轴运动模组结构示意图;
27.图7是本发明的茶叶临时存储器爆炸图;
28.图8是本发明的采茶头部分另一视角图;
29.图9是本发明的导航模组示意图;
30.图10是本发明的换行模组工作示意图;
31.图中:1、采茶模组;2、导航模组;3、换行模组;4、供电模组;5、电气驱动模块;6、安装板;7、行走腿;8、伺服轮毂;11、rgb相机;12、挂板;13、三轴运动模组;14、采茶头;15、茶叶临时存储器;16、集茶器;17、横向旋转电机;18、纵向旋转电机;19、竖直连接板;21、导航相机;22、转向云台;23、外部保护罩;111、rgbd相机;112、悬挂杆;131、x轴;132、y轴;133、z轴;134、采茶头连接板;135、高度调节杆;151、茶斗;152、滑动挡板;153、顶块;154、弹簧杆;155、光电传感器;161、顶针;31、推杆安装龙门机架;32、横向电机推杆;33、横向伸展电机;34、伸缩支腿电推杆;35、脚撑板。
具体实施方式
32.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
33.实施例1
34.如图1-10所示,本发明提供一种茶青精细化采摘机器人,包括采茶模组1、导航模组2、换行模组3、供电模组4、电气驱动模块5和安装板6,安装板6的顶端安装有导航模组2、换行模组3和电气驱动模块5,导航模组2通过立杆安装于安装板6的顶端中心处,电气驱动模块5和换行模组3均安装于安装板6的顶端,安装板6的底端安装有采茶模组1,安装板6的底端四角处均安装有行走腿7,行走腿7的底端安装有伺服轮毂8,行走腿7的弯折处安装有供电模组4。
35.进一步的,采茶模组1包括rgb相机11、三轴运动模组13、采茶头14、茶叶临时存储器15、集茶器16和rgbd相机111,三轴运动模组13包括x轴131、y轴132和z轴133,并均配备有单独的电机进行驱动,x轴131的两端均设置有y轴132,x轴131的一侧设置有z轴133,z轴133上设置有采茶头连接板134,采茶头连接板134的一侧连接有高度调节杆135,高度调节杆135的外端挂载有rgb相机11,y轴132的一端连接有悬挂杆112,安装板6的底端安装有rgbd相机111,且rgbd相机111位于悬挂杆112的顶部,rgb相机11集成有激光定位器,高度调节杆135的底端连接有挂板12,挂板12的底端一侧连接有横向旋转电机17,横向旋转电机17通过传动板连接有纵向旋转电机18,纵向旋转电机18连接有采茶头14,挂板12的底端另一侧安装有竖直连接板19,竖直连接板19底端连接有茶叶临时存储器15,集茶器16安装于同侧的行走腿7之间。
36.茶叶临时存储器15包括两个并排设置的茶斗151,分为粗茶斗和细茶斗,茶斗151靠近顶端开口处设置有光电传感器155,茶斗151的一侧为开口结构,且安装有滑动挡板
152,滑动挡板152的外侧安装有顶块153,顶块153的顶端连接有弹簧杆154,且弹簧杆154的顶端固定于竖直连接板19的外侧,集茶器16具有多个独立的容腔,分为粗茶集茶器和细茶集茶器,且粗茶集茶器和细茶集茶器之间边沿处设置有顶针161。
37.导航模组2包括导航相机21、转向云台22和外部保护罩23,转动云台22的顶端安装有导航相机21,导航相机21的外周安装有外部保护罩23。
38.换行模组3的数量为二,并以安装板6中分线前后镜像对立设置,换行模组3包括推杆安装龙门机架31、横向电机推杆32、横向伸展电机33、伸缩支腿电推杆34和脚撑板35,推杆安装龙门机架31的两侧均连接有横向电机推杆32,推杆安装龙门机架31的两侧均连接有横向伸展电机33,并与横向电机推杆32传动连接,横向电机推杆32的底端连接有伸缩支腿电推杆34,伸缩支腿电推杆34的底端连接有脚撑板35。
39.电气驱动模块5分别对临近的模组进行控制。
40.具体的,机器人工作时,由电气驱动模块5实现控制(电气控制部分基于现有技术设定程序,属于本领域人员结合公知常识即可实现,在此不过多赘述),主要功能控制采茶机器人采茶头运动、控制机器人行走和换行作业、对对机器人电源组能源进行管理,本发明中采茶机器人的电气驱动模块5有四个分布式的电气模块组成,每个模块中配置了相应的计算、通信、供电等单元,分别对临近的机器人模块进行控制,分布式的控制形式能够减少方便各个电气组件就近的控制信号接线,因此大大减少了布线的复杂程度,从而提高了系统的稳定性;
41.采茶模组1工作时,rgbd相机111进行全局检测,rgb相机11进行局部检测,rgbd相机111确定视野内目标茶青的位置,然后由三轴运动模组13实现大行程的运动,将采茶头14运动至采摘点,此时rgb相机11和激光定位器对当前目标茶芽进行精确定位,进而引导运动三轴模组13、横向旋转电机17、纵向旋转电机18联动,从而将采茶头14精确的插入采摘点,其中x轴电机负责驱动采茶头14在x轴131上水平运动,y轴电机负责驱动采茶头14在y轴132上水平运动,z轴电机负责驱动采茶头14在z轴131上竖直运动,通过x、y、z三个轴的联动运动实现采茶头三个自由度的运动,采茶头14使用的采摘点的三维坐标是由挂载在z轴上的rgb相机11和内部激光定位器提供,当采茶头14插入采摘位置后,由采茶头14内部的电磁铁控制夹爪张合,下一步将由采茶头14负责完成茶叶嫩茎的握紧、拉断,采茶头14同时由横向旋转电机17和纵向旋转电机18两个伺服电机灵活调节角度,从而能够实现对工作距离能任意点位和角度的覆盖,茶青采摘后,由rgb相机11二次确认当前所采摘茶叶的品质(例如,一芽一叶,还是一芽两叶),如果达到要求的标准茶叶,例如一芽一叶将会由采茶头14投放到茶叶临时存储器15的细茶斗内,粗叶和茶茎将放入粗茶斗;每个茶斗151都配有一个光电传感器155,待茶叶满后发出茶叶已经装满的信号,三轴运动模组13将茶叶临时存储器14移动集茶器16的旁侧,并按照预设的位置实现临时存储器15和集茶器16的粗茶和细茶容器的对齐,之后z轴133驱动采茶头连接板14,进而使茶叶临时存储器16的位置向下移动,茶斗151背面的顶块153被集茶器16上的顶针161顶起,弹簧杆154收缩,滑动挡板152向上抬起,使茶斗151内的茶叶向外侧掉落至对应的粗茶集茶器和细茶集茶器内部,rgbd相机111同时能够检测集茶器内16茶叶的积累的高度,并根据该高度的变化以及茶陇采摘的时间,从而可提前规划在茶园的地头对已经集满茶叶的集茶器进行清空,从而保证机器人的采摘效率;
42.导航模组2工作时,通过导航相机21采集茶陇的信息用,例如茶陇走向,茶陇高度,
宽度,地形地貌等,来规划机器人的行走路线,从而实现自动行走,并且能够在完成本茶陇的采摘任务后完成相邻茶陇的检测,以辅助机器人的换行,导航模组内部的转向云台22在采茶机器人换行完毕之后,将导航相机的方向调整到与机器人行进方向一致,从而实现采茶机器人换行之后“后退变前进”的功能;
43.机器人行走由四个行走腿7上的伺服轮毂8驱动,每个轮子可以独立控制;机器人采用差速驱动的方式来保证机器人的直行和转向,并且每个轮子上都自带有刹车系统,从而保证采茶机器人在采茶的时候不会发生晃动;
44.换行模组3工作流程为:(如图10所示)
45.(1)机器人在茶陇1进行采摘工作;
46.(2)右侧的横向伸展电机33(两个)工作,将右侧的横向电机推杆32向右侧伸展,直到相邻茶陇的空地上方;
47.(3)两侧的伸缩支腿电推杆34(四个)均向下伸展,推动脚撑板35着地,并使机器人本体完全越过左右相邻的茶陇1、茶陇2的上表面;
48.(4)右侧的横向伸展电机33工作带动右侧的横向电机推杆32向内回缩,左侧的横向伸展电机33工作带动左侧的横向电机推杆32向外推动,从而实现将机器人本体向右侧进行平移,直至移动到茶陇2的上方;
49.(5)机器人左右两侧所有的伸缩支腿电推杆34向上收缩,直到机器人本体落地,并且四个脚撑板35恢复至茶陇1和茶陇2的上方;
50.(6)左侧的横向伸展电机33工作带动左侧的横向电机推杆32向内回缩,至此,机器人完成换行工作。
51.供电模组4采用四个独立电源组组成可快速独立更换电池组,也可以在设备闲置时采用充电桩充电。本发明中,电池模块放置在采茶机器人行走腿的“膝盖”位置,这种设计既保证了机器人的较低重心从而保持机器人的稳定性,同时又保证电池组具有一定的高度,方便后期人工快速更换电源;并且本发明中的电池采用分布式的方式,分别放置在四个行走腿上,这样的设计还能够使得电池在进行快速充放电的时候进行更好地散热,从而减少由于电池集中放置而造成的热量累积。
52.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1