一种基于路径规划适应山地行走的采摘机器人
1.本实用新型涉及农业机械设备技术领域,尤其涉及一种基于路径规划适应山地行走的采摘机器人。
背景技术:
2.农业是国民经济的基础,然而近年来,随着国家经济的发展,农业人口逐年减少,农业劳动强度增大,农业机器人已成为替代繁重体力劳动、改善生产条件、提高收获生产效率、转变发展方式、降低生产成本和损耗、增强综合生产能力的关键装备。农业机器人的快速发展为我国农作物增产、农民增收做出了巨大贡献,但在有限的资源和日益增长的人口之间的矛盾越来越突出的形势下,自动化智能化将是未来农业机器人的发展方向。我国的农作物生长地势呈多样性,其中丘陵和山区占国土面积的2/3,丘陵山区地形地块面积较小、道路狭窄起伏不平,使得机械作业难度大、安全性低,以至于我国农作物机械化水平地域间发展极不平衡,现有的技术装备很难满足丘陵山区农作物的采摘要求。
3.现有的采摘机器人不带有一定的减震缓冲措施,机器人在山地行走时产生的颠簸容易导致机器设备与农作物损毁。收集箱是存放农作物的重要设备,现有的采摘机器人不具有有效固定收集箱的手段,收集箱容易产生晃动,导致农作物损毁,不方便人们的使用。同时现有机器人一般采取人工控制的方式操控机器人到达目的采摘区,无法有效探测野外实际地形,构建地形图,完成指定路径的自主导航。
技术实现要素:
4.为解决现有技术的缺点和不足,提供一种基于路径规划适应山地行走的采摘机器人,本实用新型通过设置减震机构有效减缓了机器人在山地行走时产生的颠簸,解决了现有机器人在行进途中机器设备损坏与农作物损毁的问题;通过设置固定机构解决了在颠簸路段现有机器人的收集箱容易晃动,导致农作物损毁的问题;通过设置总控制模块,配合激光雷达和深度摄像头解决了现有机器人在行进过程中需要人工控制,无法智能有效的探测野外实际地形,构建地形图,完成指定路径的自主导航等问题。
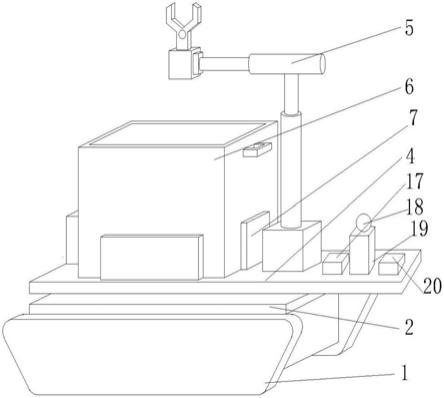
5.为实现本实用新型目的而提供的一种基于路径规划适应山地行走的采摘机器人,包括有履带行走机,所述履带行走机的顶部设置有支撑板,所述支撑板的顶部设置有减震机构,所述减震机构的顶部设置有活动板,所述减震机构用以对活动板进行减震,所述活动板的顶部设置有机器采摘臂、收集箱、总控制模块、舵机云台、激光雷达,所述舵机云台的顶部固定连接有深度摄像头,所述活动板的顶部固定连接有挡板,所述挡板的一侧与收集箱的一侧活动连接,所述活动板的顶部设置有用以对收集箱固定的固定机构。
6.作为上述方案的进一步改进,所述减震机构包括有支撑块、支撑杆、活动块、第一弹簧、活动杆和固定块,所述支撑块的底部与支撑板的顶部固定连接,所述支撑块的一侧与支撑杆的一端固定连接,所述支撑杆的表面与活动块的内部活动连接,所述支撑杆的表面与第一弹簧的内部活动连接,所述第一弹簧的一端与支撑块的一侧固定连接,所述第一弹
簧的另一端与活动块的一侧固定连接,所述活动块的顶部通过销轴与活动杆的一端活动连接,所述活动杆的另一端通过销轴与固定块的正面活动连接,所述固定块的顶部与活动板的底部固定连接。
7.作为上述方案的进一步改进,所述固定机构包括有固定箱、螺纹管、螺杆、转盘、移动板、移动杆和夹板,所述固定箱的底部与活动板的顶部固定连接,所述固定箱的内部通过轴承与螺纹管的表面活动连接,所述螺纹管的内部与螺杆的表面螺纹连接,所述螺杆的一端延伸至固定箱的外部并与转盘的一侧固定连接,所述螺杆的另一端通过轴承与移动板的一侧活动连接,所述移动板的顶部和底部均与固定箱的内壁活动连接,所述移动板的另一侧与移动杆的一端固定连接,所述移动杆的另一端延伸至固定箱的外部并与夹板的一侧固定连接,所述夹板的另一侧与收集箱的一侧固定连接。
8.作为上述方案的进一步改进,所述转盘的另一侧固定连接有转柱,所述转柱的另一端固定连接有转球。
9.作为上述方案的进一步改进,所述固定箱的内壁固定连接有限位板,所述限位板的一侧固定连接有限位杆,所述限位杆的内部与移动板的内部活动连接。
10.作为上述方案的进一步改进,所述活动块的底部固定连接有滚轮,所述滚轮的底部与支撑板的顶部活动连接。
11.作为上述方案的进一步改进,所述活动板的底部固定连接有连接块,所述连接块的底部固定连接有第二弹簧。
12.作为上述方案的进一步改进,所述第二弹簧的内部活动连接有限位块,所述限位块的底部与支撑板的顶部固定连接。
13.本实用新型的有益效果是:
14.与现有技术相比,本实用新型提供的一种基于路径规划适应山地行走的采摘机器人,采摘机器人在行进途中可以利用激光雷达20扫描周边障碍物,产生点云数据,并利用总控制模块17中的定位导航模块slamware(思岚科技公司的slam cube套件)和网络通信模块将点云数据传输到远程电脑端,电脑端可以利用(思岚科技公司的robo studio软件)绘制周边环境的地图,实现地形探测,地图构建功能。在建立好的地图中,可以设置起始出发点和目标采摘点,完成局部路径规划,或直接给出路径完成全局路径规划,实现自主导航功能。之后机器人便可自动从起始出发点穿越各种复杂地形到达目标采摘点。以串型番茄采摘为例,到达目标采摘点后,通过舵机云台19调整深度摄像头18获取实时的采摘场景,利用总控制模块17中的农作物识别算法(可以通过发明专利,发文号为cn2021082800591310,名称为“一种基于改进yolov5的串型番茄实时检测方法”,申请号为:202110999230.3),从该场景中识别出串型番茄,并定位出串型番茄的三维空间坐标。总控制模块17利用该坐标及机械臂逆运动算法,给出机器采摘臂5中各舵机的转动角度,机器采摘臂5按照规定动作采摘串型番茄到收集箱6,实现自主采摘功能。([1]袁得春.六自由度解耦机械臂的逆运动学通解[j].东北林业大学学报,2017,45(12):88-92.)完成采摘任务后,将串型番茄安全无损的送回起始点。在使用时候,操作人员转动转盘84,转盘84带动螺杆83转动,螺杆83带动螺纹管82转动,螺杆83带动移动板85在固定箱81的内部左右移动,移动板85带动移动杆86左右移动,移动杆86带动夹板87左右移动,能够对收集箱6进行固定,采摘机器人行走产生的晃动带动活动板4上下移动,活动板4带动固定块36上下移动,固定块36带动活动杆35移动,
活动杆35带动活动块33左右移动,活动块33带动第一弹簧34在支撑杆32表面拉伸,支撑块31为支撑杆32提供支撑,能够对活动板4进行减震,在履带行走机1跨越崎岖地形时,有效避免机器设备与农作物的损毁;本实用新型通过设置减震机构有效减缓了机器人在山地行走时产生的颠簸,解决了现有机器人在行进途中机器设备损坏与农作物损毁的问题;通过设置固定机构解决了在颠簸路段现有机器人的收集箱容易晃动,导致农作物损毁的问题;通过设置总控制模块,配合激光雷达解决了现有机器人在行进过程中需要人工控制,无法智能有效的探测野外实际地形,构建地形图,完成指定路径的自主导航等问题。
[0015]
具体有如下优点:
[0016]
1、本实用新型中,通过设置固定机构,能够对收集箱进行固定,通过设置减震机构,采摘机器人行走产生的晃动带动活动板上下移动,活动板带动固定块上下移动,固定块带动活动杆移动,活动杆带动活动块左右移动,活动块带动第一弹簧在支撑杆表面拉伸,支撑块为支撑杆提供支撑,能够对活动板进行减震。将滚轮安装在活动块的底部,能够辅助活动块的移动,将连接块和第二弹簧安装在活动板的底部,能够辅助对活动板的减震。将限位块安装在支撑板的顶部,能够防止第二弹簧发生偏移。通过上述设置,解决了现有的采摘机器人不带有的一定的减震效果,机器人行走时产生的颠簸容易导致机器设备损毁,农作物损毁,不方便人们使用的问题。
[0017]
2、本实用新型中,使用人员转动转盘,转盘带动螺杆和螺纹管转动,螺杆带动移动板在固定箱的内部、移动杆和夹板左右移动,能够对收集箱进行固定,将转柱和转球安装在转盘的一侧,能够方便使用人员转动转盘,将限位板和限位杆安装在固定箱的内部,能够限制移动板的活动范围。通过上述设置解决了现有机器人不方便对收集箱进行固定,收集箱容易晃动,农作物易损毁的问题。
[0018]
3、本实用新型中,采摘机器人在行进途中可以利用激光雷达扫描周边障碍物产生点云,并利用总控制模块中的定位导航模块slamware和网络通信模块将点云数据传输到远程电脑端,在电脑端完成周边环境地形图的绘制。在建立好的地图中,可以设置起始出发点和采摘目标点,完成局部路径规划。或直接给出路径完成全局路径规划。到达目标采摘点后,通过舵机云台调整深度摄像头获取实时的采摘场景,利用总控制模块中的农作物识别算法,从该场景中识别出农作物,并定位出预采摘农作物的三维空间坐标。总控制模块利用该三维空间坐标及机械臂逆运动算法,给出机器采摘臂中各舵机的转动角度,机器采摘臂按照规定动作采摘农作物到收集箱。完成采摘任务后,将农作物安全无损的送回起始点。通过上述设置解决了现有机器人在行进过程中需要人工控制,无法智能有效的探测野外实际地形,构建地形图,完成指定路径自主导航的问题。有效完成了探测地形,建立地图,路径规划,农作物采摘,农作物收集的一系列连续自动化过程。
附图说明
[0019]
以下结合附图对本实用新型的具体实施方式作进一步的详细说明,其中:
[0020]
图1为本实用新型结构的示意图;
[0021]
图2为本实用新型结构的剖视图;
[0022]
图3为本实用新型结构图2中a的结构放大图;
[0023]
图4为本实用新型结构图2中b的结构放大图。
[0024]
图中:1、履带行走机;2、支撑板;3、减震机构;31、支撑块;32、支撑杆;33、活动块;34、第一弹簧;35、活动杆;36、固定块;4、活动板;5、机器采摘臂;6、收集箱;7、挡板;8、固定机构;81、固定箱;82、螺纹管;83、螺杆;84、转盘;85、移动板;86、移动杆;87、夹板;9、转柱;10、转球;11、限位板;12、限位杆;13、滚轮;14、连接块;15、第二弹簧;16、限位块;17、总控制模块;18、深度摄像头;19、舵机云台;20、激光雷达
具体实施方式
[0025]
如图1-图4所示,本实用新型实施例中,一种基于路径规划适应山地行走的采摘机器人,包括有履带行走机1,履带行走机1的顶部设置有支撑板2,支撑板2的顶部设置有减震机构3,减震机构3的顶部设置有活动板4,活动板4的顶部设置有机器采摘臂5,所述活动板4的顶部设置有总控制模块17,所述活动板4的顶部设置有舵机云台19,所述舵机云台19的顶部固定连接有深度摄像头18,所述活动板4的顶部设置有激光雷达20,活动板4的顶部活动连接有收集箱6,活动板4的顶部固定连接有挡板7,挡板7的一侧与收集箱6的一侧活动连接,活动板4的顶部设置有固定机构8;
[0026]
减震机构3包括有支撑块31、支撑杆32、活动块33、第一弹簧34、活动杆35和固定块36,支撑块31的底部与支撑板2的顶部固定连接,支撑块31的一侧与支撑杆32的一端固定连接,支撑杆32的表面与活动块33的内部活动连接,支撑杆32的表面与第一弹簧34的内部活动连接,第一弹簧34的一端与支撑块31的一侧固定连接,第一弹簧34的另一端与活动块33的一侧固定连接,活动块33的顶部通过销轴与活动杆35的一端活动连接,活动杆35的另一端通过销轴与固定块36的正面活动连接,固定块36的顶部与活动板4的底部固定连接。
[0027]
通过设置固定机构8,能够对收集箱6进行固定,通过设置减震机构3,采摘机器人行走产生的晃动带动活动板4上下移动,活动板4带动固定块36上下移动,固定块36带动活动杆35移动,活动杆35带动活动块33左右移动,活动块33带动第一弹簧34在支撑杆32表面拉伸,支撑块31为支撑杆32提供支撑,能够对活动板4进行减震,解决了现有的采摘机器人不带有的一定的减震效果,机器人行走时产生的颠簸容易导致机器设备损毁,且不方便对收集箱进行固定,收集箱容易晃动,导致农作物损毁,不方便人们使用的问题。
[0028]
在本实施例中,固定机构8包括有固定箱81、螺纹管82、螺杆83、转盘84、移动板85、移动杆86和夹板87,固定箱81的底部与活动板4的顶部固定连接,固定箱81的内部通过轴承与螺纹管82的表面活动连接,螺纹管82的内部与螺杆83的表面螺纹连接,螺杆83的一端延伸至固定箱81的外部并与转盘84的一侧固定连接,螺杆83的另一端通过轴承与移动板85的一侧活动连接,移动板85的顶部和底部均与固定箱81的内壁活动连接,移动板85的另一侧与移动杆86的一端固定连接,移动杆86的另一端延伸至固定箱81的外部并与夹板87的一侧固定连接,夹板87的另一侧与收集箱6的一侧固定连接。通过设置固定机构8,使用人员转动转盘84,转盘84带动螺杆83和螺纹管82转动,螺杆83带动移动板85在固定箱81的内部、移动杆86和夹板87左右移动,能够对收集箱6进行固定。
[0029]
在本实施例中,转盘84的另一侧固定连接有转柱9,转柱9的另一端固定连接有转球10。通过设置转柱9和转球10,将转柱9和转球10安装在转盘84的一侧,能够方便使用人员转动转盘84。
[0030]
在本实施例中,固定箱81的内壁固定连接有限位板11,限位板11的一侧固定连接
有限位杆12,限位杆12的内部与移动板85的内部活动连接。通过设置限位板11和限位杆12,将限位板11和限位杆12安装在固定箱81的内部,能够限制移动板85的活动范围。
[0031]
在本实施例中,活动块33的底部固定连接有滚轮13,滚轮13的底部与支撑板2的顶部活动连接。通过设置滚轮13,将滚轮13安装在活动块33的底部,能够辅助活动块33的移动。
[0032]
在本实施例中,活动板4的底部固定连接有连接块14,连接块14的底部固定连接有第二弹簧15。通过设置连接块14和第二弹簧15,将连接块14和第二弹簧15安装在活动板4的底部,能够辅助对活动板4的减震。在本实施例中,第二弹簧15的内部活动连接有限位块16,限位块16的底部与支撑板2的顶部固定连接。通过设置限位块16,将限位块16安装在支撑板2的顶部,能够防止第二弹簧15发生偏移。
[0033]
在本实施例中,履带行走机1,机器采摘臂5,舵机云台19,深度摄像头18,激光雷达20,均受总控制模块17统一控制,完成探测地形,建立地图,路径规划,农作物采摘,农作物收集的一系列连续自动化过程。
[0034]
以上实施例不局限于该实施例自身的技术方案,实施例之间可以相互结合成新的实施例。以上实施例仅用以说明本实用新型的技术方案而并非对其进行限制,凡未脱离本实用新型精神和范围的任何修改或者等同替换,其均应涵盖在本实用新型技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1