一种拉线双滑块式橡胶树割胶机器人圆弧形导轨的制作方法
1.本发明属于经济林领域,涉及一种变径夹持环剥工具,尤其涉及一种拉线双滑块式橡胶树割胶机器人圆弧形导轨。
背景技术:
2.我国是世界上第五大产胶国,最大的橡胶消费国,橡胶树是一种常绿的乔木,生长在赤道附近的低纬度热带地区,直根系,单性花卉并雌性同株,分泌乳状液汁,全世界有2000多个品种橡胶树能产天然橡胶,橡胶树主要产于巴西的亚马逊河流域的马拉岳西部地区,现以分布亚洲、大洋洲、拉丁美洲等40多个国家和地区,全球6-8年以上的成年橡胶树估计有50~60亿棵,亚洲主要分布在印尼、泰国、马拉西亚、中国、印度、巴西、斯里兰卡、越南、柬埔寨、菲律宾,中国的橡胶树种植主要分布在海南、广东、云南、福建,种植面积最大的是海南,天然橡胶主要用于:(1)医疗卫生的医用手套、输血管、安全套;(2)日常生活中的雨鞋、暖水袋、松紧带;(3)工业上传送带、运输带、耐酸、耐碱的手套;(4)交通运输的各种轮胎,人们通过割胶刀,在树干上,倾斜切割2毫米厚,17毫米宽的条带,割胶时间在凌晨2~5点,这是一天中温度最低、湿度最大的时间,橡胶树经过夜间休息,体内水分饱和,树叶的蒸腾水分最少,割胶的最佳温度在19~25℃,这时乳胶的产量和干胶含量最高,当气温超过27℃时,水分蒸发快,乳胶凝固快,排胶时间短,产量低。
3.现在的橡胶割胶机,是人工手持割刀,切割橡胶树的树皮,需要每天凌晨2~5点,这个时间段同时割胶,用功量大,劳动时间集中,效率低。
技术实现要素:
4.本发明解决的问题是设计一种拉线双滑块式橡胶树割胶机器人圆弧形导轨,圆弧形导轨ⅰ和圆弧形导轨ⅱ各设置一个滑块,电机ⅰ的输出轴设有齿轮和联轴器,齿轮和齿轮槽啮合,割刀爬升杆贯穿刀架上设置的螺纹孔,支撑管贯穿刀架,支撑管一端固定滑块ⅰ上,另一端固定在滑块ⅱ上,和圆弧形导轨ⅱ在铅垂方向上成对设置,电机ⅰ转动带动齿轮槽转动,带动拉线ⅰ、拉线ⅱ运动,进而滑块ⅰ在圆弧形导轨ⅰ上运动、滑块ⅱ在圆弧形导轨ⅱ上运动,且同时按等距离向同方向运动,进而实现割刀随动。
5.本发明是采用以下的技术方案实现的:一种拉线双滑块式橡胶树割胶机器人圆弧形导轨,包括电机ⅰ、支撑管、齿轮槽、拉线圆弧形导轨ⅰ机构、拉线圆弧形导轨ⅱ机构,所述的拉线圆弧形导轨ⅰ机构,包括拉线ⅰ、拉线ⅲ、滑块ⅰ、圆弧形导轨ⅰ张紧旋转轮ⅰ和张紧旋转轮ⅱ,滑块ⅰ设置在圆弧形导轨ⅰ上,且在圆弧形导轨ⅰ上往复滑动,其中张紧旋转轮ⅰ设置在圆弧形导轨ⅰ的一端,张紧旋转轮ⅱ设置在圆弧形导轨ⅰ的另一端,拉线ⅰ一端固定在齿槽上,中间缠绕在张紧旋转轮ⅰ上,另一端与滑块ⅰ固定联接,所述的拉线圆弧形导轨ⅱ机构,包括拉线ⅱ、拉线ⅲ、滑块ⅱ、圆弧形导轨ⅱ、张紧旋转轮ⅲ、张紧旋转轮ⅳ,滑块ⅱ设置在圆弧形导轨ⅱ上,且在圆弧形导轨ⅱ上往复滑动,其中张紧旋转轮ⅲ设置在圆弧形导轨ⅱ的一端,张紧旋转轮ⅳ设置在圆弧形导轨ⅱ的另一端,拉线ⅱ一端固定在齿槽上,中间缠绕
在张紧旋转轮ⅳ上,另一端与滑块ⅱ固定联接,拉线ⅲ一端固定在滑块ⅰ上,中间缠绕在张紧旋转轮ⅱ、缠绕在张紧旋转轮ⅲ,另一端与滑块ⅱ固定联接,电机ⅰ的输出轴设有齿轮和联轴器,齿轮和齿轮槽啮合,电机ⅰ转动带动齿轮槽转动,带动拉线ⅰ、拉线ⅱ运动,进而滑块ⅰ滑块ⅱ同时按等距离向同方向运动,支撑管贯穿刀架,支撑管一端固定滑块ⅰ上,另一端固定在滑块ⅱ上,圆弧形导轨ⅰ和圆弧形导轨ⅱ在铅垂方向上成对设置。
6.圆弧形导轨ⅰ和圆弧形导轨ⅱ采用塑料件,拉线ⅰ、拉线ⅱ、拉线ⅲ采用钢丝绳。
7.电机ⅰ、既可以正转也可以反转,滑块ⅰ在圆弧形导轨ⅰ上往复运动弧长、滑块ⅱ在圆弧形导轨ⅱ上往复运动弧长取决于步进电机ⅰ旋转角度。
8.所述的圆形的张紧旋转轮ⅰ、张紧旋转轮ⅱ、张紧旋转轮ⅲ、张紧旋转轮ⅳ外圆面上设有v型沟槽,钢丝绳嵌入到v型沟槽中。
9.所述的拉线双滑块式橡胶树割胶机器人圆弧形导轨,圆弧形导轨ⅰ和圆弧形导轨ⅱ采用塑料件。
10.所述的拉线双滑块式橡胶树割胶机器人圆弧形导轨,拉线ⅰ、拉线ⅱ、拉线ⅲ采用钢丝绳。
11.在圆弧形导轨ⅰ和圆弧形导轨ⅱ与橡胶树接触面上设有圆柱状的凸起点,凸起点能增加与橡胶树表面的摩擦力。
12.圆弧形导轨ⅰ左端设有卡槽ⅰ,右端设有卡槽ⅱ,圆弧形导轨ⅱ左端设有卡槽ⅲ,右端设有卡槽ⅳ,卡扣ⅰ嵌于卡槽ⅰ内,卡扣ⅱ嵌于卡槽ⅱ内,卡扣ⅲ嵌于卡槽ⅲ内,卡扣ⅳ嵌于卡槽ⅳ内,卡扣ⅰ与捆绑带ⅰ固定联接,卡扣ⅱ与捆绑带ⅱ固定联接,卡扣ⅲ与捆绑带ⅲ固定联接,卡扣ⅳ与捆绑带ⅳ固定联接,将圆弧形导轨ⅰ、圆弧形导轨ⅱ沿铅垂方向卡扣合在橡胶树杆的上,圆弧形导轨ⅰ在上,圆弧形导轨ⅱ在下,捆绑带ⅰ与捆绑带ⅱ固定在一起,捆绑带ⅲ与捆绑带ⅳ固定在一起,电机ⅰ沿一个方向旋转,带动齿轮槽转动,带动拉线ⅰ、拉线ⅱ、拉线ⅲ运动,带动滑块ⅰ、滑块ⅱ同时按等距离向同方向运动,支撑管随动,
13.滑块ⅰ在圆弧形导轨ⅰ上从一端滑动到另一端的滑动的距离也等于滑块ⅱ在圆弧形导轨ⅱ上从一端滑动到另一端的滑动的距离,滑块ⅰ、滑块ⅱ必须同方向运动,要么同时顺时针方向运动,要么同时逆时针方向运动,也就是拉线ⅰ在凹槽中旋转缠绕圈数加拉线ⅱ在凹槽中旋转缠绕圈数等于齿轮槽上设置的凹槽数,其圈数的展开总长度等于凹槽的直径与圆周率的乘积,拉线ⅰ在凹槽中旋转缠绕增加的圈数等于拉线ⅱ在凹槽中旋转缠绕减少的圈数,反之,拉线ⅰ在凹槽中旋转缠绕的减少圈数等于拉线ⅱ在凹槽中旋转缠绕增加的圈数,只有这样才能确保滑块ⅰ、滑块ⅱ同方向同距离运动。
14.所述齿轮槽的外圆面上设有多个圆形凹槽,拉线ⅰ、拉线ⅱ嵌入到圆形凹槽中,拉线ⅰ在齿轮槽外圆面设置的凹槽中旋转缠绕圈数与加拉线ⅱ在齿轮槽外圆面设置的凹槽中旋转缠绕圈数之和等于齿轮槽外圆面的设置凹槽总个数,单个凹槽的拉线长度是凹槽的直径与圆周率的乘积,其圈数的展开总长度等于凹槽的直径与圆周率的乘积再乘以凹槽总个数,滑块ⅰ、滑块ⅱ同方向、等距离运动的理论依据是拉线ⅰ在齿轮槽外圆面上设置的凹槽中旋转缠绕增加的圈数等于拉线ⅱ在齿轮槽外圆面上设置的凹槽中旋转缠绕减少的圈数,反之,拉线ⅰ在齿轮槽外圆面设置的凹槽中旋转缠绕的减少圈数等于拉线ⅱ在齿轮槽外圆面设置的凹槽中旋转缠绕增加的圈数,但总长度不变,总长度等于在同方向上滑块ⅰ在圆弧形导轨ⅰ上从一端滑动到另一端的滑动的距离、滑块ⅱ在圆弧形导轨ⅱ上从一端滑动到另一
端的滑动的距离,单个凹槽拉线ⅰ的长度等于凹槽的直径与圆周率的乘积,单个凹槽拉线ⅱ的长度等于凹槽的直径与圆周率的乘积,其圈数的展开总长度等于凹槽的直径与圆周率的乘积再乘以凹槽总个数,但总长度不变,长度等于滑块ⅰ在圆弧形导轨ⅰ上从一端滑动到另一端的滑动的距离、滑块ⅱ在圆弧形导轨ⅱ上从一端滑动到另一端的滑动的距离,滑块ⅰ、滑块ⅱ必须是同方向运动。
15.支撑管贯穿刀架,割刀设置在刀架上,支撑管运动带动刀架运动,割刀随动。
16.为了减轻阻力,滑块ⅰ、滑块ⅱ上设置滚轮。
17.圆弧形导轨ⅰ、圆弧形导轨ⅱ与橡胶树接触的面上均匀分布齿状凸起块,增加圆弧形导轨ⅰ、圆弧形导轨ⅱ的摩擦力。
18.电机ⅰ采用步进电机,通过控制电路上设置输入键盘,输入转角度数,转角度数对应在同方向上滑块ⅰ在圆弧形导轨ⅰ从一端运动到另一端的弧长,滑块ⅱ在圆弧形导轨ⅱ从一端运动到另一端的弧长,相对应是拉线ⅰ、拉线ⅱ在凹槽中旋转圈数,1圈等于360度,n圈即n乘以360度。
19.本发明的有益效果是。
20.1、滑块ⅰ在圆弧形导轨ⅰ滑动、滑块ⅱ在圆弧形导轨ⅱ滑动滑动,阻力小、结构简单。
21.2、支撑管一端固定在圆弧形导轨ⅰ上,另一端固定在圆弧形导轨ⅱ,无死点使用方便。
附图说明
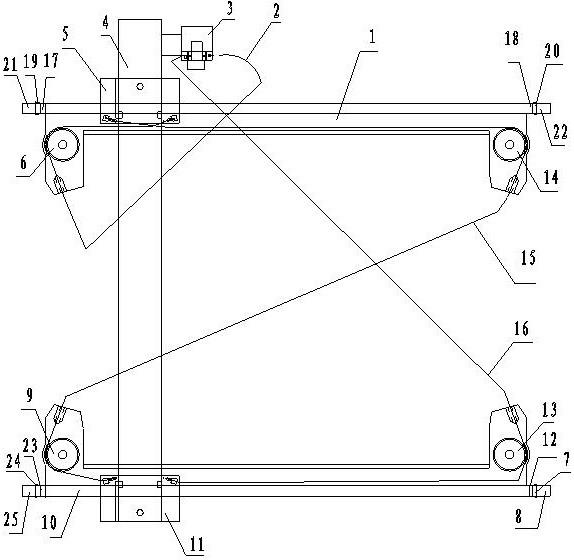
22.图1拉线双滑块式橡胶树割胶机器人圆弧形导轨展开图。
23.其中图中1、圆弧形导轨ⅰ2、拉线ⅰ3、电机ⅰ4、支撑管5、滑块ⅰ6、张紧旋转轮ⅰ7、卡扣ⅳ8、捆绑带ⅳ9、张紧旋转轮ⅲ10、圆弧形导轨ⅱ11、滑块ⅱ12、卡槽ⅳ13、张紧旋转轮ⅳ14、张紧旋转轮ⅱ15、拉线ⅲ16、拉线ⅱ17、卡槽ⅰ18、卡槽ⅱ19、卡扣ⅰ20、卡扣ⅱ21、捆绑带ⅰ22、捆绑带ⅱ23、卡槽ⅲ24、卡扣ⅲ25、捆绑带ⅲ。
具体实施方式
24.下面结合附图1对本发明作进一步实施说明。
25.实施例1。
26.一种拉线双滑块式橡胶树割胶机器人圆弧形导轨,包括电机ⅰ3、支撑管4、齿轮槽、拉线圆弧形导轨ⅰ机构、拉线圆弧形导轨ⅱ机构,所述的拉线圆弧形导轨ⅰ机构,包括拉线ⅰ2、拉线ⅲ15、滑块ⅰ5、圆弧形导轨ⅰ1、张紧旋转轮ⅰ6和张紧旋转轮ⅱ14,滑块ⅰ5设置在圆弧形导轨ⅰ1上,且在圆弧形导轨ⅰ上往复滑动,其中张紧旋转轮ⅰ6设置在圆弧形导轨ⅰ1的一端,张紧旋转轮ⅱ14设置在圆弧形导轨ⅰ1的另一端,拉线ⅰ2一端固定在齿槽上,中间缠绕在张紧旋转轮ⅰ6上,另一端与滑块ⅰ5固定联接,所述的拉线圆弧形导轨ⅱ机构,包括拉线ⅱ16、拉线ⅲ15、滑块ⅱ11、圆弧形导轨ⅱ10、张紧旋转轮ⅲ9、张紧旋转轮ⅳ13,滑块ⅱ11设置在圆弧形导轨ⅱ10上,且在圆弧形导轨ⅱ10上往复滑动,其中张紧旋转轮ⅲ9设置在圆弧形导轨ⅱ10的一端,张紧旋转轮ⅳ13设置在圆弧形导轨ⅱ10的另一端,拉线ⅱ16一端固定在齿槽上,中间缠绕在张紧旋转轮ⅳ13上,另一端与滑块ⅱ11固定联接,拉线ⅲ15一端固定在
滑块ⅰ5上,中间先缠绕在张紧旋转轮ⅱ14、最后缠绕在张紧旋转轮ⅲ9,另一端与滑块ⅱ11固定联接,电机ⅰ3的输出轴设有齿轮和联轴器,齿轮和齿轮槽啮合,电机ⅰ3转动带动齿轮槽转动,带动拉线ⅰ2、拉线ⅱ16运动,进而滑块ⅰ5、滑块ⅱ11同时按等距离向同方向运动,支撑管4贯穿刀架,支撑管4一端固定滑块ⅰ5上,另一端固定在滑块ⅱ11上,圆弧形导轨ⅰ1和圆弧形导轨ⅱ10在铅垂方向上成对设置,滑块ⅰ5在圆弧形导轨ⅰ1上从一端滑动到另一端的滑动的距离等于滑块ⅱ11在圆弧形导轨ⅱ10上从一端滑动到另一端的滑动的距离,也等于拉线ⅰ2在凹槽中旋转缠绕圈数,也等于拉线ⅱ16在凹槽中旋转缠绕圈数,其圈数的长度等于凹槽的直径与圆周率的乘积。
27.支撑管4贯穿刀架,割刀设置在刀架上,支撑管4运动带动刀架运动,割刀随动。
28.电机ⅰ3沿一个方向旋转,带动齿轮槽转动,带动拉线ⅰ2、拉线ⅱ16、拉线ⅲ15运动,进而带动滑块ⅰ5、滑块ⅱ11同时按等距离向同方向运动,支撑管4随动,滑块ⅰ5在圆弧形导轨ⅰ1上从一端滑动到另一端的滑动的距离也等于滑块ⅱ11在圆弧形导轨ⅱ10上从一端滑动到另一端的滑动的距离,滑块ⅰ5、滑块ⅱ11必须同方向运动,要么同时顺时针方向运动,要么同时逆时针方向运动,也等于拉线ⅰ2在齿轮槽中旋转缠绕圈数,也等于拉线ⅱ16在凹槽中旋转缠绕圈数,也就是拉线ⅰ2在凹槽中旋转缠绕圈数加拉线ⅱ16在凹槽中旋转缠绕圈数等于齿轮槽中设置的凹槽数,凹槽一圈的长度是凹槽的直径与圆周率的乘积,其圈数的展开总长度等于凹槽的直径与圆周率的乘积再乘以凹槽总个数,拉线ⅰ2在凹槽旋转缠绕增加的圈数等于拉线ⅱ16在凹槽中旋转缠绕减少的圈数,反之,拉线ⅰ2在凹槽中旋转缠绕的减少圈数等于拉线ⅱ16在凹槽中旋转缠绕增加的圈数,但总长度不变,总长度等于滑块ⅰ5在圆弧形导轨ⅰ1上从一端滑动到另一端的滑动的距离、滑块ⅱ11在圆弧形导轨ⅱ10上从一端滑动到另一端的滑动的距离,滑块ⅰ5、滑块ⅱ11必须是同步、同方向、等距离运动。
29.圆弧形导轨ⅰ1左端设有卡槽ⅰ17,右端设有卡槽ⅱ18,圆弧形导轨ⅱ10左端设有卡槽ⅲ23,右端设有卡槽ⅳ12,卡扣ⅰ19嵌于卡槽ⅰ17内,卡扣ⅱ20嵌于卡槽ⅱ18内,卡扣ⅲ24嵌于卡槽ⅲ23内,卡扣ⅳ7嵌于卡槽ⅳ12内,卡扣ⅰ19与捆绑带ⅰ21固定联接,卡扣ⅱ20与捆绑带ⅱ22固定联接,卡扣ⅲ24与捆绑带ⅲ25固定联接,卡扣ⅳ7与捆绑带ⅳ8固定联接,将圆弧形导轨ⅰ1、圆弧形导轨ⅱ10沿铅垂方向卡扣合在橡胶树杆的上,圆弧形导轨ⅰ1在上,圆弧形导轨ⅱ10在下,将捆绑带ⅰ21与捆绑带ⅱ22固定在橡胶林中的一棵橡胶树上,捆绑带ⅲ25与捆绑带ⅳ8固定在橡胶林中的一棵橡胶树上,电机ⅰ3采用步进电机,通过控制电路上设置输入键盘,输入电机ⅰ3转角度数720度,电机ⅰ3旋转2圈,即2个360度,启动电机ⅰ3,设定为顺时针方向转动,带动齿轮槽转动,带动拉线ⅰ2、拉线ⅱ16、拉线ⅲ15运动,带动滑块ⅰ5、滑块ⅱ11同时按等距离向同方向运动,支撑管4随动,且滑块ⅰ5、滑块ⅱ11同方向运动,到达设定位置,即终点,电机ⅰ3停止运动,再次启动电机ⅰ3沿另一个方向旋转,设定为逆时针方向转动,带动齿轮槽转动,带动拉线ⅰ2、拉线ⅱ16、拉线ⅲ15运动,带动滑块ⅰ5、滑块ⅱ11同时按等距离向同方向运动,支撑管4随动,且滑块ⅰ5、滑块ⅱ11同方向运动,到达设定位置,电机ⅰ3停止运动,回到起始点的位置,完成一次往复运动,支撑管4贯穿刀架,刀架随支撑管4做圆周运动,齿轮可变行程机构固定在刀架上,割刀固定在齿轮可变行程机构,刀架随齿轮可变行程机构在支撑管4所在的铅垂线方向上做直线运动,支撑管4运动,进而带动割刀运动,割刀从起点运动到终点即为割刀在橡胶树切割的运动轨迹,到达终点后,割刀在电机带动下从橡胶树切割位置抬起,远离橡胶树的表面,从起点到终点,电机ⅰ3沿一个方向旋转,从终
25与捆绑带ⅳ8固定在实验室模拟的一棵橡胶树上,电机ⅰ3采用步进电机,通过控制电路上设置输入键盘,输入电机ⅰ3转角度数1800度,电机ⅰ3旋转5圈,即5个360度,启动电机ⅰ3,设定为顺时针方向转动,带动齿轮槽转动,带动拉线ⅰ2、拉线ⅱ16、拉线ⅲ15运动,带动滑块ⅰ5、滑块ⅱ11同时按等距离向同方向运动,支撑管4随动,且滑块ⅰ5、滑块ⅱ11同方向运动,到达设定位置,即终点,电机ⅰ3停止运动,再次启动电机ⅰ3沿另一个方向旋转,设定为逆时针方向转动,带动齿轮槽转动,带动拉线ⅰ2、拉线ⅱ16、拉线ⅲ15运动,带动滑块ⅰ5、滑块ⅱ11同时按等距离向同方向运动,支撑管4随动,且滑块ⅰ5、滑块ⅱ11同方向运动,到达设定位置,电机ⅰ3停止运动,回到起始点的位置,完成一次往复运动,支撑管4贯穿刀架,刀架随支撑管4做圆周运动,齿轮可变行程机构固定在刀架上,割刀固定在齿轮可变行程机构,刀架随齿轮可变行程机构在支撑管4所在的铅垂线方向上做直线运动,支撑管4运动,进而带动割刀运动,割刀从起点运动到终点即为割刀在橡胶树切割的运动轨迹,到达终点后,割刀在电机带动下从橡胶树切割位置抬起,远离橡胶树的表面,从起点到终点,电机ⅰ3沿一个方向旋转,从终点返回起点,电机ⅰ3沿另一个方向旋转。
35.以上所述,仅是本发明的较佳实施例而已,并非是对本发明作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例,凡是未脱离本发明技术方案内容,依据本发明型的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本发明型技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1