清垄器的制作方法
清垄器
1.相关申请的交叉引用
2.本技术要求享有于2020年4月6日提交的美国临时申请no.63/005,559;于2020年4月16日提交的美国临时申请no.63/010833;于2020年4月30日提交的美国临时申请no.63/017,869;于2020年6月17日提交的美国临时申请no.63/040,311;于2020年9月4日提交的美国临时申请no.63/074,684;2020年11月19日提交的美国临时申请no.63/115,875;和于2020年12月8日提交的美国临时申请no.63/122,735的权益,所有申请的全部内容通过引用整体并入本文。
背景技术:
3.清垄器被设置在种植机上的开沟组件的前方,以使任何作物残茬、土块或其它碎块侧向向外地运动,从而准备为向后对准的开沟组件提供清垄器苗床区域,所述开沟组件打开其中沉积有种子的种子沟槽。虽然许多市场上可买到的清垄器满足了它们的预期目的,但是仍然需要一种提供改进的性能的清垄器组件。
附图说明
4.图1是农业种植机的实施例的俯视平面图。
5.图2是种植机垄单元的实施例的侧视图,其示出包括导轮的清垄器组件的实施例。
6.图2a是种植机垄单元的实施例的另一个侧视图,其示出与图2所示的基本相同但没有导轮的清垄器组件的另一个实施例。
7.图3是图2的清垄器组件的后透视图。
8.图3a是图2a的清垄器组件的后透视图。
9.图4是图3的清垄器组件的右侧视图。
10.图5是图3的清垄器组件的左侧视图。
11.图6是图3的清垄器组件的前视图。
12.图7是图3的清垄器组件的后视图。
13.图8是图3的清垄器组件的俯视平面图。
14.图9是图3的清垄器组件的仰视平面图。
15.图10是图3的清垄器组件的框架组件的后透视图,为了更好地示出框架组件的实施例,去除了清垄器轮和导轮。
16.图11是图10的框架组件的前透视图,并且示出清垄器轮之一的实施例的分解图。
17.图12是图10的框架组件的分解的后透视图。
18.图13是图10的框架组件的上部子框架的实施例的分解的前透视图。
19.图14是图10的框架组件的中间子框架的实施例的分解的后透视图。
20.图15是图10的框架组件的下部子框架的实施例的分解的后透视图。
21.图16是用于图10的框架组件的下部子框架的可替代实施例的侧视图。
22.图17是图10的框架组件的后支柱子框架的后透视图。
23.图18是种植机行的实施例的侧视图,其示出包括导轮的清垄器组件的另一个实施例。
24.图18a是种植机垄单元的实施例的又一个侧视图,其示出与图18所示的基本相同但没有导轮的清垄器组件的又一个实施例。
25.图19是图18的清垄器组件的后透视图。
26.图19a是图18a的清垄器组件的后透视图。
27.图20是图19的清垄器组件的右侧视图。
28.图21是图19的清垄器组件的左侧视图。
29.图22是图19的清垄器组件的前视图。
30.图23是图19的清垄器组件的后视图。
31.图24是图19的清垄器组件的俯视平面图。
32.图25是图19的清垄器组件的仰视平面图。
33.图26是图19的清垄器组件的后透视图,为了更好地示出框架组件的实施例,去除了清垄器轮和导轮。
34.图27是图26的框架组件的前透视图,并且示出清垄器轮之一的实施例的分解图。
35.图28是图26的框架组件的分解的后透视图。
36.图29是图26的框架组件的上部子框架的实施例的分解的前透视图。
37.图30是图26的框架组件的中间子框架的实施例的分解的后透视图。
38.图31是图26的框架组件的下部子框架的实施例的分解的后透视图。
39.图32是图26的框架组件的后支柱子框架的实施例的分解的后透视图。
40.图33是致动器系统的实施例的部件的透视图,其示出气囊致动器和部分分解的弹簧组件的实施例。
41.图34是种植机垄单元的实施例的又一个侧视图,其示出包括导轮的清垄器组件的又一个实施例。
42.图34a是种植机垄单元的实施例的又一个侧视图,其示出与图34所示的基本相同但没有导轮的清垄器组件的又一个实施例。
43.图35是图34的清垄器组件的后透视图。
44.图35a是图34a的清垄器组件的后透视图。
45.图36是图35的清垄器组件的右侧视图。
46.图37是图35的清垄器组件的左侧视图。
47.图38是图35的清垄器组件的前视图。
48.图39是图35的清垄器组件的后视图。
49.图40是图35的清垄器组件的俯视平面图。
50.图41是图35的清垄器组件的仰视平面图。
51.图42是图35的清垄器组件的后透视图,为了更好地示出框架组件的实施例,去除了清垄器轮和导轮。
52.图43是图42的框架组件的前透视图,并且示出清垄器轮之一的实施例的分解图。
53.图44是图42的框架组件的分解的后透视图。
54.图45是图42的框架组件的下部子框架和后支柱子框架的分解的透视图,其示出深
度选择器的实施例的分解图。
55.图46是图42的框架组件的中间子框架和连杆的透视图,并且示出致动器系统的实施例。
56.图47是图42的框架组件的上部子框架的实施例的分解的后透视图。
57.图48是图42的框架组件的中间子框架的实施例的分解的后透视图。
58.图49是图42的框架组件的连杆的实施例的分解的后透视图。
59.图50是图42的框架组件的下部子框架的实施例的分解的后透视图。
60.图51是图42的框架组件的后支柱子框架的后透视图。
61.图52a是说明当致动器系统被致动以施加下压力时的清垄器组件的运动的示意性图示。
62.图52b是说明当致动器系统被致动以施加上升力时的清垄器组件的运动的示意性图示。
63.图53是种植机垄单元的实施例的又一个侧视图,其示出包括导轮的清垄器组件的又一个实施例。
64.图53a是种植机垄单元的实施例的又一个侧视图,其示出与图34所示的基本相同但没有导轮的清垄器组件的又一个实施例。
65.图54是图53的清垄器组件的后透视图。
66.图54a是图53a的清垄器组件的后透视图。
67.图55是图54的清垄器组件的右侧视图。
68.图56是图54的清垄器组件的左侧视图。
69.图57是图54的清垄器组件的前视图。
70.图58是图54的清垄器组件的后视图。
71.图59是图54的清垄器组件的俯视平面图。
72.图60是图54的清垄器组件的仰视平面图。
73.图61是图54的清垄器组件的后透视图,为了更好地示出框架组件的实施例,去除了清垄器轮和导轮。
74.图62是图54的框架组件的前透视图,并且示出清垄器轮之一的实施例的分解图。
75.图63是图54的框架组件的分解的后透视图。
76.图64是图54的框架组件的下部子框架和后支柱子框架的分解的透视图,其示出深度选择器的实施例的分解图。
77.图65是图54的框架组件的中间子框架和连杆的透视图,并且示出致动器系统的实施例。
78.图66是图54的框架组件的上部子框架的实施例的分解的后透视图。
79.图67是图54的框架组件的连杆的实施例的透视图。
80.图68是图54的框架组件的中间子框架的实施例的透视图。
81.图69是图54的框架组件的下部子框架的实施例的前透视图。
82.图70是图54的框架组件的后支柱子框架的后透视图。
83.图71是种植机垄单元的又一个实施例的侧视图,其示出用于清垄器组件的上述实施例中的任何一个的可替代的安装布置。
84.图72是种植机垄单元的又一个实施例的侧视图,其因此示出清垄器组件和安装布置的另一个可替代实施例。
85.图73是包括第三清垄器轮组件的实施例的清垄器组件的又一个实施例的后透视图。
86.图74是图73的清垄器组件的前透视图。
87.图75是图73的清垄器组件的右侧视图。
88.图76是图73的清垄器组件的左侧视图。
89.图77是图73的清垄器组件的俯视平面图。
90.图78是图73的清垄器组件的仰视平面图。
91.图79是图73的清垄器组件的分解的右前透视图。
92.图80是图73的清垄器组件的分解的左前透视图。
93.图81是包括清垄器分流器组件的实施例的清垄器组件的又一个实施例的右前透视图。
94.图82是带有图81的清垄器分流器组件的清垄器组件的俯视平面图。
95.图83是带有图81的清垄器分流器组件的清垄器组件的仰视平面图。
96.图84是带有图81的清垄器分流器组件的清垄器组件的相同的右前透视图,但为了更好地示出分流器组件,示出去除了清垄器轮。
97.图85是图84的清垄器组件的相同的右前透视图,但示出分解的图81的清垄器分流器组件。
98.图86是图81的清垄器分流器组件的后透视图。
99.图87是适用于如图50和图69中所示的下部子框架的实施例的清垄器分流器组件的可替代实施例的前透视图。
100.图88是图3的清垄器组件的实施例的侧视图,其示出用于确定施加在清垄器组件上的下压力的负载传感器的可替代放置。
101.图89是图19的清垄器组件的实施例的侧视图,其示出用于确定施加在清垄器组件上的下压力的负载传感器的放置。
102.图90是图35的清垄器组件的实施例的侧视图,其示出用于确定施加在清垄器组件上的下压力的负载传感器的放置。
103.图91是图54的清垄器组件的实施例的侧视图,其示出用于确定施加在清垄器组件上的下压力的负载传感器的放置。
104.图92是图88至图91中所示的负载传感器之一的实施例的前视图。
105.图93是图92的负载传感器的侧视图。
106.图94是图92的负载传感器的套管的透视图。
107.图95是图92的负载传感器的负载感测构件的仰视透视图。
108.图96是图94的负载感测构件的俯视透视图。
具体实施方式
109.本文中引用的所有参考文献的全部内容均被并入本文。如果本文中的定义与并入的参考文献中的定义有冲突,则应当以本文中的定义为准。
110.现在参照附图,其中类似的附图标记贯穿若干附图指定相同的或相对应的部件,图1示出拖拉机5在由箭头11指定的向前行进方向上拖拉农业种植机10。种植机10包括工具条14,所述工具条14可操作地支撑多个种植机垄单元200。种植机监控器50可以位于拖拉机5的驾驶室中,所述种植机监控器50可以包括中央处理单元(“cpu”)、存储器和图形用户界面(“gui”)(例如,触摸屏界面)。全球定位系统(“gps”)接收器52可以被安装到拖拉机5。
111.图2是种植机垄单元200的实施例的侧视图。垄单元200包括垄单元框架210,所述垄单元框架210包括向下延伸的柄254和从向前支架214支撑的向后延伸的框架构件212。垄单元框架210还可以包括也由向前支架214支撑的上梁215。上梁215可以支撑一个或多个料斗226,所述一个或多个料斗226容纳种子的供应以及任选的肥料或其它化学输入的供应。垄单元框架202可以由并行连杆216枢转地连接到工具条14。致动器218可以被设置为对垄单元200施加上升力和/或下压力。电磁阀390可以与致动器218流体地连通,以用于修改由致动器218施加的上升力和/或下压力。开口系统234可以包括两个开口盘244,所述两个开口盘244被滚动地安装到向下延伸的柄254并且被设置为在土壤40中打开v形沟槽38。一对导轮248可以由一对相对应的导轮臂260从框架构件204枢转地支撑。众所周知,导轮248相对于开口盘244的向上行进限定沟槽38的深度。深度调节摇杆268限制导轮臂260的向上行进,并且从而限制导轮248的向上行进。深度调节致动器380可以被配置为修改深度调节摇杆268的位置,并且从而修改导轮248的高度。致动器380可以是安装到垄单元200并且枢转地耦接到摇杆268的上端部的线性致动器。在一些实施例中,深度调节致动器380可以包括在国际专利申请no.pct/us2012/035585(公布no.wo2012149415)中公开的装置。编码器382可以被配置为生成与致动器380的线性延伸有关的信号;应当理解,当导轮臂260与摇杆268接触时,致动器380的线性延伸与沟槽38的深度有关。下压力传感器392可以被配置为生成与由导轮248施加在土壤40上的力的量有关的信号;在一些实施例中,下压力传感器392可以包括仪表化引脚,摇杆268围绕所述仪表化引脚被枢转地耦接到垄单元200,如在美国专利公布no.us2010/0180695中公开的那些仪表化引脚。
112.继续参照图2,种子计230(例如,在国际专利申请no.pct/us2012/030192(公布no.wo2012129442)中公开的种子计)可以被设置为将种子42例如通过种子管232从料斗226沉积到沟槽38中,所述种子管232被设置为朝向沟槽引导种子。在一些实施例中,种子计230可以由电驱动器315供以动力,所述电驱动器315被配置为驱动种子计内的种子盘。在其它实施例中,驱动器315可以包括被配置为驱动种子盘的液压驱动器。种子传感器305(例如,被配置为生成指示种子的通过的信号的光学或电磁种子传感器)可以被安装到种子管232并且被设置为横过种子42的路径发送光或电磁波,以检测每颗种子的通过。可以包括一个或多个关闭轮的关闭系统236可以被枢转地耦接到垄单元200并且被配置为关闭沟槽38。
113.图2还示出清垄器组件1000的实施例,其被安装到工具条14并且被定位在开沟组件234的前方。应当理解,种植机10的每个垄单元200都将具有相关联的清垄器组件1000,其与垄单元200的相应的开沟组件234纵向地对准。在所示的实施例中,清垄器组件1000包括导轮1050(如图3所示)。清垄器组件1000朝向工具条14的后方延伸,并且通过合适的安装结构被刚性地安装到工具条14的下侧,所述安装结构可以包括安装板1101和一个或多个u型螺栓1001,如图所示。或者,清垄器组件1000可以通过任何合适的安装结构或连接件(包括螺栓支架或通过焊接)安装到工具条14的顶侧、后侧或前侧。
114.图2a示出由附图标记1000a指定的清垄器组件的可替代实施例。清垄器组件1000a的实施例基本与清垄器组件1000的实施例相同,除了1000a的实施例不包括导轮以外。
115.图3是图2所示的清垄器组件1000的放大的后透视图。图3a的视图与图3中的视图相同,但是示出没有导轮的清垄器组件1000a的实施例。由于清垄器组件1000和1000a这两个实施例是基本相同的,所以除了在实施例1000a中去除导轮之外,仅描述实施例1000,应认识到,对导轮1050、导轮轴1051和相关联的部件的任何参考都将不适用于1000a实施例。
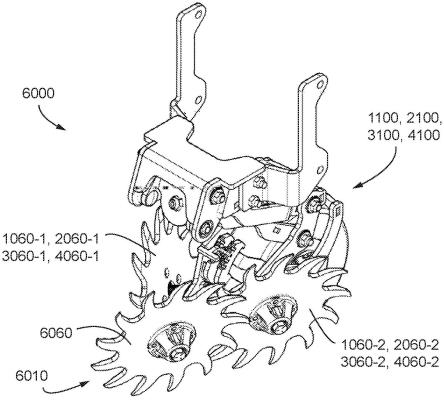
116.图4和图5分别是清垄器组件1000的右侧视图和左侧视图。图6和图7分别是前视图和后视图,并且图8和图9分别是俯视图和仰视图。清垄器组件1000包括在其后端部处由导轮1050支撑的框架组件1100。清垄器轮1060-1、1060-2由框架组件1100可旋转地支撑。每个清垄器轮1060-1、1060-2都包括围绕其圆周的径向间隔的尖齿1062。清垄器轮1060-1、1060-2被取向为向外地和向后地发散,使得清垄器轮1060-1、1060-2的尖齿1062在它们旋转时在前端部处交错。在操作中,随着种植机10在向前行进的方向11上运动,土壤与尖齿1062接合,促使清垄器轮1060-1、1060-2旋转。由于其取向,随着清垄器轮1060-1、1060-2旋转,它们将任何作物残茬、土块或其它碎块侧向向外地指引,以便为向后对准的开沟组件234提供清垄器苗床。在沟槽38被开沟组件234打开之前,导轮1050用于夯实会被清垄器轮1060-1、1060-2扰乱的土壤40。用导轮1050夯实土壤在干燥的土壤中会有利于防止土壤40落入沟槽38中。
117.在框架组件1100内定位有致动器系统1300,以便为导轮1050和清垄器轮1060-1、1060-2提供可调节的下压力和任选的上升力。在该实施例中,致动器系统1300包括气动缸1302,但是致动器系统1300可以利用提供可调节的下压力和任选的上升力的任何致动器,包括气动缸、液压缸、气囊和机电致动器,如稍后将更详细地讨论的。
118.图10是框架组件1100的后透视图,为清晰起见,去除了导轮1050、清垄器轮1060-1、1060-2和致动器系统1300。图11是在去除了导轮1050和致动器系统1300以及第一清垄器轮1060-1的情况下的框架组件1100的前透视图,但是示出第二清垄器轮1060-2及其安装部件的分解图。图12是框架组件1100的分解的后透视图。参照10至图12,框架组件1100包括上部子框架1100a、中间子框架1100b、下部子框架1100c、后支柱子框架1100d以及第一侧连杆1200-1和第二侧连杆1200-2。后支柱子框架1100d包括下部子框架1100c的一部分。稍后将更详细地描述包括子框架1100a、1100b、1100c和1100d在内的部件。
119.如图12最好地所示,中间子框架1100b在其前端部处通过在相应的中间子框架1100b与上部子框架1100a中的对准孔口1003和1004内接收的螺纹连接器1002枢转地连接到上部子框架1100a。中间子框架1100b也在其后端部处通过在相应的中间子框架1100b与后支柱子框架1100d中的对准孔口1007和1008内接收的螺纹连接器1006枢转地连接到后支柱子框架1100d,所述后支柱子框架1100d包括下部子框架1100c的一部分。第一侧连杆1200-1和第二侧连杆1200-2在其前端部处通过在相应的第一侧连杆1200-1和第二侧连杆1200-2与上部子框架1100a中的对准孔口1011、1012内接收的螺纹连接器1010枢转地连接到上部子框架1100a。第一侧连杆1200-1和第二侧连杆1200-2在其后端部处通过在相应的第一连杆1200-1和第二连杆1200-2与后支柱子框架1100d中的对准孔口1015、1016内接收的螺纹连接器1014枢转地连接到后支柱子框架1100d。后支柱子框架1100d通过螺纹连接器1018与下部子框架1100c旋转地固定,所述螺纹连接器1018被接收在下部框架1100c中的弧
形狭槽1019内并且与在后支柱子框架1100d中的开口1021可螺纹地接合。后支柱子框架1100d通过导轮轴螺栓1051与下部框架1100c连接,所述导轮轴螺栓1051通过在相应的下部框架1100c与后支柱子框架1100d中的对准孔口1022、1023被接收。应当显而易见,在省略了导轮1050的1000a实施例中,短螺栓可以延伸通过孔口1022、1023而由螺母(未示出)固定来代替导轮轴螺栓1051。应当理解,上部子框架1100a与中间子框架1100b和侧连杆1200-1、1200-2的向前枢转连接连同中间子框架1100b和侧连杆1200-1、1200-2与后支柱子框架1100d的向后枢转连接一起提供了四杆连杆机构,所述四杆连杆机构允许中间子框架1100b和下部子框架1100c相对于刚性地固定到工具条14的上部子框架1100a竖向地运动。
120.图13示出上部子框架1100a的分解的前透视图。上部子框架1100a包括第一角撑板1102-1和第二角撑板1102-2,其从安装板1101向下地延伸并且由前板1104侧向地间隔。角撑板1102-1、1102-2可以包括角板凸片1105,其被接收在安装板1101中的角板凸片狭槽1106中。前板1104包括切口1107,以容纳穿过其的致动器1302(参见图6至图7)。前板1104可以包括从前板1104向下延伸的致动器前安装吊耳1108-1、1108-2。致动器前安装吊耳1108-1、1108-2中的每个都可以包括孔1109以接收销1110(图11),用于将致动器1302的前端部安装到上部子框架1100a(参见图6)。致动器前安装吊耳1108-1、1108-2中的每个都可以包括吊耳凸片1111,所述吊耳凸片1111被接收在前板1104中的相应的吊耳凸片狭槽1112内。前板1104还可以包括侧凸片1113,其被接收在角撑板1102-1、1102-2中的侧凸片狭槽1114内。应当理解,并非使用凸片和狭槽来连接上部子框架1100a的各个零件,而是可以通过焊接或通过螺栓连接件来连接上部子框架1100a的各个零件。或者,上部子框架1100a可以例如通过铸造被制造为单个零件。角撑板1102-1、1102-2包括用于接收螺纹连接器1002的孔口1004,用于将中间子框架1100b枢转地固定到所述角撑板1102-1、1102-2,如以上参照图12所描述的。此外,角撑板1102-1、1102-2包括用于接收螺纹连接器1010的孔口1012,用于将第一侧连杆1200-1和第二侧连杆1200-2枢转地固定到所述角撑板1102-1、1102-2,如以上参照图12所描述的。角撑板1102-1、1102-2还包括用于接收上螺纹连接器1117和下螺纹连接器1118的孔口1115和1116(图11和图12),所述上螺纹连接器1117和下螺纹连接器1118通过与第一侧连杆1200-1和第二侧连杆1200-2邻接以限制四杆连杆机构的向上和向下竖向运动而起到上止挡件和下止挡件的作用。
121.图14示出中间子框架1100b的分解的后透视图。中间子框架1100b包括基部构件1120以及第一侧导轨1121-1和第二侧导轨1121-2。基部构件1120包括切口1122,以容纳致动器1302(参见图3和图6)。基部构件1120可以包括侧凸片1123,其被接收在侧导轨1121-1、1121-2中的侧凸片狭槽1124内。基部构件1120的后端部可以包括致动器后安装吊耳1125。致动器后安装吊耳1125可以包括孔1126以接收销1127(图3和图10),用于将致动器1302的后端部安装到中间子框架1100b。致动器后安装吊耳1125可以包括吊耳凸片1128,其被接收在基部构件1120中的吊耳凸片狭槽1129内。应当理解,并非使用凸片和狭槽来连接中间子框架1100b的各个零件,而是可以通过焊接或通过螺栓连接件来连接中间子框架1100b的各个零件。或者,中间子框架1100b可以例如通过铸造被制造为单个零件。侧导轨1121-1、1122-2包括用于接收螺纹连接器1010的向前孔口1011,用于将中间子框架1100b的侧导轨1121-1、1121-2枢转地固定到上部子框架1100a的角板1012-1、1012-2,如以上参照图12所描述的,并且侧导轨1121-1、1122-2包括用于接收螺纹连接器1014的向后孔口1015,用于将
中间子框架1100b的侧导轨1121-1、1121-2枢转地固定到后支柱子框架1100d,如以上参照图12所描述的。
122.图15示出下部子框架1100c的分解的后透视图。下部子框架1100c包括第一清垄器轮支撑臂1130-1和第二清垄器轮支撑臂1130-2,它们通过前板1132被连接在其前端部处。前板1132可以包括侧凸片1133,其被接收在第一清垄器轮支撑臂1130-1和第二清垄器轮支撑臂1130-2中的侧凸片狭槽1134内。应当理解,并非使用凸片和狭槽来连接下部子框架1100c的各个零件,而是可以通过焊接或通过螺栓连接件来连接下部子框架1100c的各个零件。或者,下部子框架1100c可以例如通过铸造被制造为单个零件。第一清垄器轮支撑臂1130-1和第二清垄器轮支撑臂1130-2中的每个都包括正方形开口1135,用于接收清垄器轮轴螺栓1061-1、1061-2(图11)中的相应一者的正方形柄部分1063(图11),如稍后将更详细地讨论的。每个清垄器轮支撑臂1130-1、1130-2还包括开口1022,用于接收导轮轴螺栓1051,如图10至图12所示。每个清垄器轮支撑臂1130-1、1130-2还包括用于接收螺纹连接器1018的弧形狭槽1019,所述螺纹连接器1018由后支柱子框架1100d可螺纹地接收,用于将清垄器轮支撑臂1130-1、1130-2固定到后支柱子框架1100d,如以上参照图12所描述的。应当理解,弧形狭槽1019和螺纹连接器1018协作以形成深度选择器1400,从而允许下部子框架1100c绕导轮轴螺栓1051枢转,使得清垄器轮1060-1、1060-2是可相对于后支柱子框架1100d和导轮1050可调节地定位的,以便改变清垄器轮1060-1、1060-2相对于导轮1050的深度设定。在如图16所示的可替代实施例中,可以反而使用沿着弧形设置的一系列离散的开口1019a来代替单个弧形狭槽1019,从而为清垄器轮1060-1、1060-2提供相对于导轮1050的离散的深度设定。
123.图17是后支柱子框架1100d的后透视图。后支柱子框架1100d包括由侧板1142间隔开的第一支柱1140-1和第二支柱1140-2。侧板1142可以包括凸片1143,其被接收在第一支柱1140-1和第二支柱1140-2中的每个的狭槽1144内。或者,侧板1142可以通过焊接或螺栓连接件附接到支柱1140-1、1140-2。或者,支柱1140-1、1140-2和侧板1142可以例如通过铸造被制造为单个零件。第一支柱1140-1和第二支柱1140-2中的每个都包括用于接收螺纹连接器1014的孔口1016,用于与相应的侧连杆1200-1、1200-2连接,并且第一支柱1140-1和第二支柱1140-2中的每个都包括用于接收导轮轴螺栓1051的孔口1023,如以上参照图12所描述的。
124.后支柱子框架1000d可以包括刮板1145,以去除在操作过程中会堆积在导轮1050上的泥土或碎块。刮板1145可以被附接到在后支柱子框架1000d的后支柱1140-1、1140-2之间的侧板1142,并且可以包括具有弧形边缘1146的板,所述弧形边缘1146近似于导轮1050的轮廓(参见图3、图7和图8)。刮板1145可以借助螺纹连接器1148被附接到侧板1142,所述螺纹连接器1148延伸通过细长孔1147,所述细长孔1147与侧板1142中的内螺纹孔口1149对准。细长孔1147将允许刮板1145相对于侧板1142可调节地定位,以改变与导轮1050的距离,来适应不同的导轮尺寸和轮廓以及考虑到导轮胎面和刮板1145的磨损。
125.参照图11,清垄器轮支撑臂1130-1、1130-2中的每个中的正方形开口1135和清垄器轮轴螺栓1061-1、1061-2的正方形柄部分1063协作,以将清垄器轮轴螺栓1061-1、1061-2旋转地约束到清垄器轮支撑臂1130-1、1130-2。每个清垄器轮轴螺栓1061-1、1061-2都接收间隔物1063。每个清垄器轮轴螺栓1061-1、1061-2都通过相应的第一清洁器轮1060-1和第
二清洁器轮1060-2中的每个内的中心开口1064延伸。在每个清垄器轮轴螺栓1061-1、1061-2的端部上接收衬套1065,并且衬套被接收在具有中心开口1071的轮毂1070内。轮毂1070通过螺母1072被固定到相应的第一清垄器轮1060-1和第二清垄器轮1060-2,所述螺母1072被可螺纹地接收在螺纹连接器1074上,所述螺纹连接器1074通过在清垄器轮1060-1、1060-2中的孔口1066和通过轮毂1070中的对准孔1073延伸。凸耳螺母1075可螺纹地接收轮轴螺栓1061-1、1061-2的端部,从而将清垄器轮1060-1、1060-2轴向地约束到相应的清垄器轮轴螺栓1061-1、1061-2上,而间隔物1063和衬套1065允许清垄器轮1060-1、1060-2绕相应的清垄器轮轴螺栓1061-1、1061-2自由地旋转。
126.返回参照图3和图12,导轮轴螺栓1051通过在下部子框架1100c的相应的第一清垄器轮支撑臂1130-1和第二清垄器轮支撑臂1130-2与后支柱子框架1100d的支柱1140-1、1140-2中的对准孔口1022、1023和通过导轮1050的轮毂1052(图3)延伸。间隔物衬套1053(图12)可以在轮毂1052的每一侧上被设置在导轮轴螺栓1051上,以保持导轮1050在支柱1140-1、1140-2之间居中。螺母1054经螺纹连接到导轮轴螺栓1051的端部上,从而将导轮1050固定到下部子框架1100c和后支柱子框架1100d。
127.如前所述,致动器系统1300可以利用提供可调节的下压力和任选的上升力的任何致动器,包括气动缸、液压缸、气囊和机电致动器。在一个实施例中,包括致动器系统1300的致动器1302是在美国专利号8,550,020中描述的可从precision planting llc,23207townline rd,tremont,il 61568得到的气缸或者在美国专利号9,144,189中描述的也可从precision planting得到的气缸。由致动器系统1302施加在导轮1050上的下压力可以由控制器(例如,在美国专利号8,550,020中引用的“控制器300”)或由流体控制端口(例如,在pct公布no.wo2020/056395中描述的“流体控制端口10”)控制。种植机10的每个清垄器组件1000的致动器1302都可以被逐行地控制,或者由种植机10的部分作为组来控制,或者在整个种植机10上被集体地控制。
128.期望的下压力的量可以是土壤条件和作物残茬的量或类型以及将清垄器轮1060为与土壤接合所设定的深度的函数。例如,在干燥的土壤条件下,可以期望有更大的下压力,使得导轮1050将在开口组件234的前方更夯实地包装土壤40,以用于形成更好的种子沟槽38并且在种子被沉积之前防止或最小化土壤落入种子沟槽38中。可替代地,在潮湿的土壤条件下,可以期望有更小的下压力。下压力监控系统(稍后讨论)可以被用于确定和调节由致动器系统1300所施加的下压力。
129.图18是种植机垄单元200的侧视图,如先前以上参照图2所描述的,但是带有由附图标记2000指定的清垄器组件的另一个实施例。清垄器组件2000被安装到工具条14上,并且被定位在开沟组件234的前方。再次,应当理解,种植机10的每个垄单元200都将具有相关联的清垄器组件2000,其与垄单元200的相应的开沟组件234纵向地对准。在所示的实施例中,清垄器组件2000包括导轮2050(如图19所示)。清垄器组件2000朝向工具条14的后方延伸,并且通过合适的安装结构被刚性地安装到工具条14的下侧,所述安装结构可以包括安装板2101和一个或多个u型螺栓2001,如图所示。或者,清垄器组件2000可以通过任何合适的安装结构或连接件(包括螺栓支架或通过焊接)安装到工具条14的顶侧、后侧或前侧。
130.图18a示出由附图标记2000a指定的清垄器组件的可替代实施例。清垄器组件2000a的实施例基本与清垄器组件2000的实施例相同,除了2000a的实施例不包括导轮以
外。
131.图19是图18所示的清垄器组件2000的放大的后透视图。图19a的视图与图19的视图相同,但是示出没有导轮的清垄器组件2000a的实施例。由于清垄器组件2000和2000a这两个实施例是基本相同的,所以除了在实施例2000a中去除导轮之外,仅描述实施例2000,应认识到,对导轮2050、导轮轴2051和相关联的部件的任何参考都不适用于2000a实施例。
132.图20和图21分别是清垄器组件2000的右侧视图和左侧视图。图22和图23分别是前视图和后视图,并且图24和图25分别是俯视图和仰视图。清垄器组件2000包括在其后端部处由导轮2050支撑的框架组件2100。清垄器轮2060-1、2060-2由框架组件2100可旋转地支撑。每个清垄器轮2060-1、2060-2都包括围绕其圆周的径向间隔的尖齿2062。清垄器轮2060-1、2060-2被取向为向外地和向后地发散,使得清垄器轮2060-1、2060-2的尖齿2062在它们旋转时在前端部处交错。在操作中,随着种植机10在向前行进的方向11上运动,土壤与尖齿2062接合,促使清垄器轮2060-1、2060-2旋转。由于其取向,随着清垄器轮2060-1、2060-2旋转,它们将任何作物残茬、土块或其它碎块侧向向外地指引,以便为向后对准的开沟组件234提供清垄器苗床。在沟槽38被开沟组件234打开之前,导轮2050用于夯实会被清垄器轮2060-1、2060-2扰乱的土壤40。用导轮2050夯实土壤在干燥的土壤中会有利于防止土壤40落入沟槽38中。
133.在框架组件2100内定位有致动器系统2300,以便为导轮2050和清垄器轮2060-1、2060-2提供可调节的下压力和任选的上升力。在该实施例中,致动器系统2300包括气囊2302和弹簧组件2310,但是致动器系统2300可以利用提供可调节的下压力和任选的上升力的任何致动器,包括气动缸、液压缸、气囊和机电致动器,如稍后将更详细地讨论的。
134.图26是框架组件2100的后透视图,为清晰起见,去除了导轮2050、清垄器轮2060-1、2060-2和致动器系统2300。图27是在去除了导轮2050和致动器系统2300以及第一清垄器轮2060-1的情况下的框架组件2100的前透视图,但是示出第二清垄器轮2060-2及其安装部件的分解图。图28是框架组件2100的分解的后透视图。参照图26至图28,框架组件2100包括上部子框架2100a、中间子框架2100b、下部子框架2100c、后支柱子框架2100d以及第一连杆2200-1和第二连杆2200-2。后支柱子框架2100d包括下部子框架2100c的一部分。稍后将更详细地描述子框架2100a、2100b、2100c和2100d。
135.如图28最好地所示,中间子框架2100b在其前端部处通过在相应的中间子框架2100b与上部子框架2100a中的对准孔口2003、2004内接收的螺纹连接器2002枢转地连接到上部子框架2100a。中间子框架2100b在其后端部处通过螺纹连接器2006被枢转地连接,所述螺纹连接器2006被接收在相应的中间子框架2100b、后支柱子框架2100d中和在下部子框架2100c中的对准孔口2007、2008和2009内。应当理解,中间子框架2100b的后端部中的孔口2007是内螺纹,用于接收螺纹连接器2006的螺纹。后支柱子框架2100d中的孔口2008的尺寸被设定为枢转地接收螺纹连接器2006的无螺纹柄,并且在下部子框架2100c中的孔口2008是细长开口2008,所述细长开口2008的尺寸被设定为接收螺纹连接器2006的头部。因此,下部子框架2100c不通过螺纹连接器2006与后支柱子框架连接。反而,细长开口2008用作引导件,螺纹连接器2006的头部在所述引导件内运动。
136.第一连杆2200-1和第二连杆2200-2在其前端部处通过在相应的第一连杆2200-1和第二连杆2200-2与上部子框架2100a中的对准孔口2011和2012内接收的螺纹连接器2010
枢转地连接到上部子框架2100a。第一连杆2200-1和第二连杆2200-2在其后端部处通过在相应的第一连杆2200-1和第二连杆2200-2与后支柱子框架2100d中的对准孔口2015、2016内接收的螺纹连接器2014枢转地连接到后支柱子框架2100d。
137.后支柱子框架2100d通过螺纹连接器2018被旋转地固定到下部子框架2100c,所述螺纹连接器2018被接收在下部框架2100c中的弧形狭槽2019内并且与在后支柱子框架2100d中的螺纹孔口2021可螺纹地接合。后支柱子框架2100d通过导轮轴螺栓2051与下部子框架2100c连接,所述导轮轴螺栓2051通过在相应的下部框架2100c与后支柱子框架2100d中的对准孔口2022、2023被接收。应当显而易见,在省略了导轮2050的2000a实施例中,短螺栓可以延伸通过孔口2022、2023而由螺母(未示出)固定来代替导轮轴螺栓2051。应当理解,上部子框架2100a与中间子框架2100b和连杆2200-1、2200-2的向前枢转连接连同中间子框架2100b和连杆2200-1、2200-2与后支柱子框架2100d和下部子框架2100c的向后枢转连接一起提供了四杆连杆机构,所述四杆连杆机构允许中间子框架2100b和下部子框架2100c相对于刚性地固定到工具条14的上部子框架2100a竖向地运动。
138.继续参照图28的分解图,后支柱子框架2100d还可以包括任选的深度选择器2400,以便改变清垄器轮2060-1、2060-2相对于导轮2050的深度设定。深度选择器2400包括具有螺纹柄和销钉端部的指旋螺钉2024。指旋螺钉2024的螺纹柄经螺纹连接到下部子框架2100c中的内螺纹孔2025中,而指旋螺钉2024的销钉端部与一系列离散的孔2026之一接合,所述一系列离散的孔2026以弧形布置在后支柱子框架2100d中。应当理解,下部子框架2100c的相对角度或位置能够通过松开螺纹连接器2018而相对于后支柱子框架2100d被可运动地调节,所述螺纹连接器2018穿过弧形狭槽2019进入螺纹孔口2021中。当下部子框架2100c被调节到期望的角度或位置(螺纹连接器在弧形狭槽2019内运动,并且螺纹连接器2006在细长开口2009内运动)时,指旋螺钉2024可以转动,以促使销钉端部落座在离散的孔2026之一内。然后,螺纹连接器2018可以被拧紧以将下部子框架2100c固定到后支柱子框架2100d。可替代地,如以上参照图16的清垄器实施例1000所描述的,弧形狭槽2019可以用一系列离散的孔代替,所述一系列离散的孔以弧形布置(没有示出,但与图16中的孔2019a相对应),并且指旋螺钉2024以及孔2019和2026会被消除,但是上述深度选择器2400的使用更易于设定下部子框架2100c相对于后支柱子框架2100d的期望的角度或位置。
139.继续参照图28,包括致动器系统2300(稍后讨论)的一部分的弹簧组件2310通过螺纹连接器2028被固定到中间子框架2100b,所述螺纹连接器2028被接收在相应的中间子框架2100b与弹簧组件2310的下杆2302中的对准孔口2029,、2030内。弹簧组件2310通过螺纹连接器2032被固定到上部子框架2100a,所述螺纹连接器2032被接收在相应的上部子框架2100a和弹簧组件2310的u形支架2320(稍后讨论)中的对准孔口2033和2034内。
140.继续参照图28,螺纹连接器2036穿过上部子框架2100a中的弧形开口2037并且被接收在中间子框架2100b中的孔口2038内。如稍后所讨论的,随着中间子框架2100d相对于上部子框架2100b(作为四杆连杆机构的一部分)运动,螺纹连接器2036沿着弧形开口2037运动。当螺纹连接器2026与弧形开口2037的上端部邻接时,螺纹连接器2026用作上止挡件,防止中间子框架2100b进一步向上运动。当螺纹连接器2026与弧形开口2037的下端部邻接时,螺纹连接器2026用作下止挡件,防止中间子框架2100b进一步向下运动。
141.图29示出上部子框架2100a的分解的前透视图。上部子框架2100a包括第一角撑板
2102-1和第二角撑板2102-2,其从安装板2101向下地延伸并且由前板2104侧向地间隔。角撑板2102-1、2102-2可以具有上前钩2103,用于接收安装板2101的前边缘。角撑板2102-1、2102-2可以包括角板凸片2105,其被接收在安装板2101中的角板凸片狭槽2106中。或者,具有角板凸片2109的耳板2107可以被接收在安装板2101中的角板凸片狭槽2106中。耳板2107可以通过螺纹连接器2108(图28)附接到角撑板2102-1、2102-2,所述螺纹连接器2108被接收在相应的角撑板2102-1、2102-2和耳板2107中的对准孔口2110、2111内。前板2104可以包括侧凸片2112,其被接收在角撑板2102-1、2102-2中的侧凸片狭槽2113内。应当理解,,并非使用凸片和狭槽来连接上部子框架2100a的各个零件,而是可以通过焊接或通过螺栓连接件来连接上部子框架2100a的各个零件。或者,上部子框架2100a可以例如通过铸造被制造为单个零件。
142.前板2104包括孔口2114,通过所述孔口2114延伸出气囊2302的上接头(nipple)并且在其上可螺纹地接收配件2126(稍后讨论)。角撑板2102-1、2102-2包括用于接收螺纹连接器2002的孔口2004,用于将中间子框架2100b枢转地固定到所述角撑板2102-1、2102-2,如以上参照图28所描述的。另外地,角撑板2102-1、2102-2中的每个都包括用于接收螺纹连接器2010的孔口2012,用于将第一连杆2200-1和第二连杆2200-2枢转地固定到所述角撑板2102-1、2102-2,如以上参照图28所描述的。角撑板2102-1、2102-2中的每个还包括接收螺纹连接器2032的孔口2033,所述螺纹连接器2032固定弹簧组件2310的u形支架(稍后讨论)。此外,角撑板2102-1、2102-2中的每个还包括弧形开口2037,螺纹连接器2036是在所述弧形开口2037中可运动的,如以上参照图28所描述的。
143.图30示出中间子框架2100b的分解的后透视图。中间子框架2100b包括基部构件2120以及第一侧导轨2121-1和第二侧导轨2121-2。基部构件2120可以包括侧凸片2122,其被接收在侧导轨2121-1、2121-2中的侧凸片凹口2123内。基部构件2120包括孔口2124,通过所述孔口2124延伸有螺纹连接器2125(图28),用于将气囊2302的下端部固定到基部构件2120。应当理解,并非使用凸片和狭槽来连接中间子框架2100b的各个零件,而是可以通过焊接或通过螺栓连接件来连接中间子框架2100b的各个零件。或者,中间子框架2100b可以例如通过铸造被制造为单个零件。侧导轨2121-1、2122-2中的每个都包括用于接收螺纹连接器2002的前孔口2003,用于将中间子框架2100b的侧导轨2121-1、2121-2枢转地固定到上部子框架2100a的角板2012-1、2012-2,如以上参照图28所描述的。侧导轨2121-1、2122-2中的每个都包括用于接收螺纹连接器2006的后孔口2007,如以上参照图28所描述的。侧导轨2121-1、2122-2中的每个都包括用于接收螺纹连接器2028的孔口2029,用于附接弹簧组件2310的杆(稍后讨论)。侧导轨2121-1、2122-2中的每个都包括用于接收螺纹连接器2036的孔口2038,所述螺纹连接器2036被接收在上部子框架2100a的弧形开口2037内,如以上参照图28所描述的。
144.图31示出下部子框架2100c的分解的后透视图。下部子框架2100c包括第一清垄器轮支撑臂2130-1和第二清垄器轮支撑臂2130-2,它们通过前板2132被连接在其前端部处。前板2132可以包括侧凸片2133,其被接收在第一清垄器轮支撑臂2130-1和第二清垄器轮支撑臂2130-2中的侧凸片狭槽2134内。应当理解,并非使用凸片和狭槽来连接下部子框架2100c的各个零件,而是可以通过焊接或通过螺栓连接件来连接下部子框架2100c的各个零件。或者,下部子框架2100c可以例如通过铸造被制造为单个零件。第一清垄器轮支撑臂
2130-1和第二清垄器轮支撑臂2130-2中的每个都包括正方形开口2135,用于接收清垄器轮轴螺栓2061-1、2061-2(图27)中的相应一者的正方形柄部分2063(图27),如稍后将更详细地讨论的。每个清垄器轮支撑臂2130-1、2130-2还包括开口2022,用于接收导轮轴螺栓2051,如图28所示。每个清垄器轮支撑臂2130-1、2130-2还包括细长开口2009,在所述细长开口2009中接收螺纹连接器2006,如以上参照图28所描述的。每个清垄器轮支撑臂2130-1、2130-2还包括用于接收螺纹连接器2018的弧形狭槽2019,如以上参照图28所描述的。每个清垄器轮支撑臂2130-1、2130-2还包括用于接收指旋螺钉2024的孔口2025,如以上参照图28所描述的。
145.图32是后支柱子框架2100d的后透视图。后支柱子框架2100d包括由侧板2142间隔开的第一支柱2140-1和第二支柱2140-2。侧板2142可以包括凸片2143,其被接收在第一支柱2140-1和第二支柱2140-2中的每个的狭槽2144内。或者,侧板2142可以通过焊接或螺栓连接件附接到支柱2140-1、2140-2。或者,支柱2140-1、2140-2和侧板2142可以例如通过铸造被制造为单个零件。第一支柱2140-1和第二支柱2140-2中的每个都包括孔口2022,所述孔口2022与下部子框架2100c中的用于接收轴轮螺栓2051的孔口2023对准,如以上参照图28所描述的。支杆2140-1、2140-2中的的每个还包括:孔口2008,螺纹连接器2006通过所述孔口2008延伸;以及孔口2016,其用于接收螺纹连接器2014;和内螺纹孔口2021,其用于接收螺纹连接器2018;以及以弧形布置的一系列孔口2026,指旋螺钉2024的销钉端部被接收到全部所述一系列孔口2026中,如以上参照图28所描述的。
146.后支柱子框架2100d可以包括刮板2145,以去除在操作过程中会堆积在导轮2050上的泥土或碎块。刮板2145可以被附接到在后支柱子框架2100d的后支柱2140-1、2140-2之间的侧板2142,并且可以包括具有弧形边缘2146的板,所述弧形边缘2146近似于导轮2050的轮廓(参见图19)。刮板2145可以借助螺纹连接器2148被附接到侧板2142,所述螺纹连接器2148延伸通过细长孔2147,所述细长孔2147与侧板2142中的内螺纹孔口2149对准。细长孔2147将允许刮板2145相对于侧板2142可调节地定位,以改变与导轮2050的距离,来适应不同的导轮尺寸和轮廓以及考虑到导轮胎面和刮板2145的磨损。
147.参照图27,清垄器轮支撑臂2130-1、2130-2中的每个中的正方形开口2135和清垄器轮轴螺栓2061-1、2061-2的正方形柄部分2063协作,以将清垄器轮轴螺栓2061-1、2061-2旋转地约束到清垄器轮支撑臂2130-1、2130-2。每个清垄器轮轴螺栓2061-1、2061-2都接收间隔物2063。每个清垄器轮轴螺栓2061-1、2061-2都通过相应的第一清洁器轮2060-1和第二清洁器轮2060-2中的每个内的中心开口2064延伸。在每个清垄器轮轴螺栓2061-1、2061-2的端部上接收衬套2065,并且衬套被接收在具有中心开口2071的轮毂2070内。轮毂2070通过螺母2072被固定到相应的第一清垄器轮2060-1和第二清垄器轮2060-2,所述螺母2072被可螺纹地接收在螺纹连接器2074上,所述螺纹连接器2074通过在清垄器轮2060-1、2060-2中的孔口2066和通过轮毂2070中的对准孔2073延伸。凸耳螺母2075可螺纹地接收轮轴螺栓2061-2、2061-2的端部,从而将清垄器轮2060-1、2060-2轴向地约束到相应的清垄器轮轴螺栓2061-2、2061-2上,而间隔物2063和衬套2065允许清垄器轮2060-1、2060-2绕相应的清垄器轮轴螺栓2061-2、2061-2自由地旋转。
148.返回参照图19和图28,导轮轴螺栓2051通过在下部子框架2100c的相应的第一清垄器轮支撑臂2130-1和第二清垄器轮支撑臂2130-2与后支柱子框架2100d的支柱2140-1、
2140-2中的对准孔口2022、2023和通过导轮2050的轮毂2052(图19)延伸。间隔物衬套2053(图28)可以在轮毂2052的每一侧上被设置在导轮轴螺栓2051上,以保持导轮2050在支柱2140-1、2140-2之间居中。螺母2054经螺纹连接到导轮轴螺栓2051的端部上,从而将导轮2050固定到下部子框架2100c和后支柱子框架2100d。
149.图33是包括气囊2302和弹簧组件2310在内的致动器系统2300的分解的透视图。参照与图29结合的图33,气囊2302在其上端部处通过配件2126被固定,所述配件2126可螺纹地接收接头2127,所述接头2127延伸通过上部子框架2100a的前板2040中的孔口2114。参照与图28和图30结合的图33,气囊2302在其下端部处通过螺纹连接器2125被固定,所述螺纹连接器2125延伸通过中间子框架2100b的基部构件2120中的孔口2124。参照与图27、图28和图29结合的图33,弹簧组件2310被固定到中间子框架2100b并且在前板2104的前方和气囊2302的前方被接收在上部子框架2100a的角撑板2102-1、2102-2之间。弹簧组件2310包括具有内螺纹孔口2030的杆2312,在所述内螺纹孔口2030中接收螺纹连接器2028,如以上参照图28所描述的。横向镗孔2314与杆的纵向轴线成横向地穿过杆2312。杆2312包括横向通道2316,其尺寸被设定为接收螺栓2318的头部,以防止螺栓2318转动。螺栓2318的轴穿过u形支架2320中的孔口2319。u形支架2320的向上转动的端部包括孔口2034,所述孔口2034接收螺纹连接器2032,如以上参照图28所描述的。螺栓2318的轴接收轴环2322。弹簧2324落座在轴环2322上。螺栓2318的上端部接收垫圈2326并且可螺纹地接收螺母2328。应当理解,因为杆2312被固定到中间子框架2100b并且u形支架2320被固定到上部子框架2100a,当螺母2327被拧紧到螺栓2317上时,弹簧2325被压缩,趋向于沿顺时针方向(如图28所示)绕穿过螺纹连接器2002的轴线枢转中间子框架2100b,所述螺纹连接器2002将中间子框架2100b的前端部枢转地固定到上部子框架2100a。因此,应当认识到,弹簧组件2310起到在中间子框架2100b的后端部处提供上升力(并且从而将上升力提供到下部子框架2100c和后支柱子框架2100d)的作用。通过将螺母2327拧紧到螺栓2317上,弹簧2325的压缩增大中间子框架2100b上的上升力。通过松开螺栓2317上的螺母2327,可以降低上升力的量。在一个实施例中,由弹簧组件提供的上升力的量足以提升清垄器轮2060-1、2060-2而使其不与土壤40接触。虽然弹簧组件2310被示出为具有两个弹簧2325,但是弹簧组件2310可以由单个弹簧2325构造,所述单个弹簧2325被接收在定位在杆2312的中点处的单个螺栓2317上。另一方面,气囊2302对中间子框架2100b施加下压力,以抵消弹簧组件2310的上升力。通过增大和减小气囊2302中的气压,促使气囊2302分别地膨胀和收缩,可以实现施加到导轮2050和清垄器轮2060-1、2060-2上的期望的下压力的量。
150.虽然致动器系统2300的以上实施例描述了与弹簧组件2310结合的气囊1302,但是应当理解,会合适的是致动器系统2300可以利用提供可调节的下压力和任选的上升力的任何致动器。由致动器系统2302施加在导轮2050上的下压力可以由控制器(例如,在美国专利号8,550,020中引用的“控制器300”)或由流体控制端口(例如,在pct公布no.wo2020/056395中描述的“流体控制端口10”)控制。种植机10的每个清垄器组件2000的致动器2302都可以被逐行地控制,或者由种植机10的部分作为组来控制,或者在整个种植机10上被集体地控制。
151.期望的下压力的量可以是土壤条件和作物残茬的量或类型以及将清垄器轮2060为与土壤接合所设定的深度的函数。例如,在干燥的土壤条件下,可以期望有更大的下压
力,使得导轮2050将在开口组件234的前方更夯实地包装土壤40,以用于形成更好的种子沟槽38并且在种子被沉积之前防止或最小化土壤落入种子沟槽38中。可替代地,在潮湿的土壤条件下,可以期望有更小的下压力。下压力监控系统(稍后讨论)可以被用于确定和调节由致动器系统2300所施加的下压力。
152.图34是种植机垄单元200的侧视图,如先前以上参照图2所描述的,但是带有由附图标记3000指定的清垄器组件的又一个实施例。清垄器组件3000被安装到工具条14,并且被定位在开沟组件234的前方。再次,应当理解,种植机10的每个垄单元200都将具有相关联的清垄器组件3000,其与垄单元200的相应的开沟组件234纵向地对准。在所示的实施例中,清垄器组件3000包括导轮3050(如图35所示)。清垄器组件3000朝向工具条14的后方延伸,并且通过合适的安装结构被刚性地安装到工具条14的下侧,所述安装结构可以包括安装板3101和一个或多个u型螺栓3001,如图所示。或者,清垄器组件3000可以通过任何合适的安装结构或连接件(包括螺栓支架或通过焊接)安装到工具条14的顶侧、后侧或前侧。
153.图34a示出由附图标记3000a指定的清垄器组件的可替代实施例。清垄器组件3000a的实施例基本与清垄器组件3000的实施例相同,除了3000a的实施例不包括导轮3050以外。此外,3000a的实施例可以省略后支柱子框架3100b(稍后描述)。
154.图35是图34所示的清垄器组件3000的放大的后透视图。图35a的视图与图35中的视图相同,但是示出没有导轮和没有后支柱子框架3100d的清垄器组件3000a的实施例(稍后讨论)。由于清垄器组件3000和3000a这两个实施例是基本相同的,所以除了在实施例3000a中去除导轮(以及任选地稍后讨论的后支柱子框架3100d)之外,仅描述实施例3000,应认识到,对导轮3050、导轮轴3051和相关联的部件的任何参考都将不适用于3000a实施例。
155.图36和图37分别是清垄器组件3000的右侧视图和左侧视图。图38和图39分别是前视图和后视图,并且图40和图41分别是俯视图和仰视图。清垄器组件3000包括在其后端部处由导轮3050支撑的框架组件3100。清垄器轮3060-1、3060-2由框架组件3100可旋转地支撑。每个清垄器轮3060-1、3060-2都包括围绕其圆周的径向间隔的尖齿3062。清垄器轮3060-1、3060-2被取向为向外地和向后地发散,使得清垄器轮3060-1、3060-2的尖齿3062在它们旋转时在前端部处交错。在操作中,随着种植机10在向前行进的方向11上运动,土壤与尖齿3062接合,促使清垄器轮3060-1、3060-2旋转。由于其取向,随着清垄器轮3060-1、3060-2旋转,它们将任何作物残茬、土块或其它碎块侧向向外地指引,以便为向后对准的开沟组件234提供清垄器苗床。在沟槽38被开沟组件234打开之前,导轮3050用于夯实会被清垄器轮3060-1、3060-2扰乱的土壤40。用导轮3050夯实土壤在干燥的土壤中会有利于防止土壤40落入沟槽38中。
156.在框架组件3100内定位有致动器系统3300,以便为导轮3050和清垄器轮3060-1、3060-2提供可调节的下压力和任选的上升力。在该实施例中,致动器系统3300利用两个气囊3302和3304(图45),但是致动器系统3300可以利用提供可调节的下压力和任选的上升力的任何致动器,包括气动缸、液压缸、气囊和机电致动器,如稍后将更详细地讨论的。
157.图42是框架组件3100的后透视图,为清晰起见,去除了导轮3050、清垄器轮3060-1、3060-2和致动器系统3300。图43是在去除了导轮3050和致动器系统3300以及第一清垄器轮3060-1的情况下的框架组件3100的前透视图,但是示出第二清垄器轮3060-2及其安装部
件的分解图。图44是框架组件3100的分解的后透视图。参照图42至图44,框架组件3100包括上部子框架3100a、中间子框架3100b、下部子框架3100c、后支柱子框架3100d以及第一连杆3200-1和第二连杆3200-2。后支柱子框架3100d包括下部子框架3100c的一部分。图45是示出下部子框架3100c和后支柱子框架3100d的分解的前透视图。图46示出中间子框架3100b和连杆3200-1、3200-2的透视图,为清晰起见,用虚线示出致动器组件3300的第一气囊3302和第二气囊3304。稍后将更详细地描述子框架3100a、3100b、3100c、3100d和连杆3200-1、3200-2。
158.如图44最好地所示,中间子框架3100b在其前端部处通过在相应的中间子框架3100b与上部子框架3100a中的对准孔口3003、3004内接收的螺纹连接器3002枢转地连接到上部子框架3100a。螺纹连接器3002和孔口3003、3004可以如在先前的实施例1000、2000中所示的那样经螺纹连接。或者,如图所示,在中间子框架3100b中的孔口2003可以是正方形孔口,其接收螺纹连接器3002的正方形柄部分。在上部子框架3100a中的孔口3004的尺寸可以被设定为接收套管3009和套接(collared)衬套3010,所述套管3009和套接衬套3010由在螺纹连接器3002的螺纹端部上接收的螺母3011保留。中间子框架3100b在其后端部处通过在相应的中间子框架3100b中和在下部子框架3100c中的孔口3007、3008内接收的螺纹连接器3006枢转地连接。螺纹连接器3006和孔口3007、3008可以如在先前的实施例1000、2000中所示的那样经螺纹连接。或者,如图所示,在下部子框架3100c中的孔口3008可以是正方形孔口,其接收螺纹连接器3006的正方形柄部分。在中间子框架3100b中的孔口3007的尺寸可以被设定为接收套管3009和套接衬套3010,所述套管3009和套接衬套3010由在螺纹连接器3006的螺纹端部上接收的螺母3011保留。
159.第一连杆3200-1和第二连杆3200-2在其前端部处通过在相应的第一连杆3200-1和第二连杆3200-2与上部子框架3100a中的对准孔口3013、3014内接收的螺纹连接器3012枢转地连接到上部子框架3100a。螺纹连接器3012和孔口3013、3014可以如在先前的实施例1000、2000中所示的那样经螺纹连接。或者,如图所示,在上部子框架3100a中的孔口3014可以是正方形孔口,其接收螺纹连接器3012的正方形柄部分。在第一连杆3200-1和第二连杆3200-2中的孔口3013的尺寸可以被设定为接收套管3009和套接衬套3010,所述套管3009和套接衬套3010由在螺纹连接器3012的螺纹端部上接收的螺母3011保留。第一连杆3200-1和第二连杆3200-2在其后端部处通过在相应的第一连杆3200-1和第二连杆3200-2与下部子框架3100c中的对准孔口3017、3018内接收的螺纹连接器3016枢转地连接到下部子框架3100c。螺纹连接器3016和孔口3017、3018可以如在先前的实施例1000、2000中所示的那样经螺纹连接。或者,如图所示,在下部子框架3100c中的孔口3017可以是正方形孔口,其接收螺纹连接器3016的正方形柄部分。在第一连杆3200-1和第二连杆3200-2中的孔口3018的尺寸可以被设定为接收套管3009和套接衬套3010,所述套管3009和套接衬套3010由在螺纹连接器3016的螺纹端部上接收的螺母3011保留。
160.后支柱子框架3100d通过在后支柱子框架3100d与下部子框架3100c中的对准孔口3025、3026(参见图45)内接收的螺纹连接器3024枢转地连接到下部子框架3100c。如图43和图45中最好地所示,后支柱子框架3100d也通过深度选择器3400的带钩臂3402与下部子框架3100c链接(稍后讨论)。应当理解,上部子框架3100a与中间子框架3100b和连杆3200-1、3200-2的向前枢转连接连同中间子框架3100b和连杆3200-1、3200-2与下部子框架3100c的
向后枢转连接一起提供了四杆连杆机构,所述四杆连杆机构允许中间子框架3100b和下部子框架3100c相对于刚性地固定到工具条14的上部子框架3100a竖向地运动。应当显而易见,在3000a实施例中,整个后支柱子框架3100d可以被省略,这是由于后支柱子框架3100d的主要目的是支撑在3000a实施例中不存在的导轮3050。然而,如稍后详细地解释的,后支柱子框架3100d与下部子框架3100c协作,以经由深度选择器3400实现深度选择。因此,如果期望有深度选择,则清垄器组件3000a的实施例可以与后支柱子框架3100d一起使用,从而仅仅省略导轮3050和导轮轴螺栓3051。
161.图47示出上部子框架3100a的分解的前透视图。上部子框架3100a包括第一角撑板3102-1和第二角撑板3102-2,其从安装板3101向下地延伸并且由前板3104侧向地间隔。角撑板3102-1、3102-2可以分别包括用于接收螺纹连接器3002、3012的孔口3004、3014,用于分别附接中间子框架3100b和导轨3200-1、3200-2,如以上参照图44所描述的。前板3104可以包括侧凸片3105,其被接收在角撑板3102-1、3102-2中的侧凸片狭槽3106内。前板3104包括凹陷部3107,以适应将螺纹连接器3012插入角撑板3102-1、3102-2中的孔口3014中。连接板3108包括上凸片3109,其被接收在安装板3101中的凸片狭槽3110内。连接板3108还包括底部钩3111,其接收和接合前板2004的后边缘和凹陷区域。应当理解,并非使用凸片和狭槽来连接上部子框架3100a的各个零件,而是可以通过焊接或通过螺栓连接件来连接上部子框架3100a的各个零件。或者,上部子框架3100a可以例如通过铸造被制造为单个零件。
162.图48示出中间子框架3100b的分解的后透视图。中间子框架3100b包括前基部构件3120和后基部构件3122以及第一侧导轨3121-1和第二侧导轨3121-2。基部构件3120、3122可以包括侧凸片3123,其被接收在侧导轨3121-1、3121-2中的侧凸片凹口3124内。应当理解,并非使用凸片和狭槽来连接中间子框架3100b的各个零件,而是可以通过焊接或通过螺栓连接件来连接中间子框架3100b的各个零件。或者,中间子框架3100b可以例如通过铸造被制造为单个零件。前基部构件3120包括孔口3125,第一气囊3302的接头通过所述孔口3125延伸并且接收配件3126(图43),所述配件3126将第二气囊3304可螺纹地固定到前基部构件3120。后基部构件3122包括孔口3127,第一气囊致动器3302的接头通过所述孔口3127延伸并且接收配件3128(图46),所述配件3128将第一气囊3302可螺纹地固定到后基部构件3122。侧导轨3121-1、3122-2中的每个都包括用于接收螺纹连接器3002的前孔口3003,用于将中间子框架3100b的侧导轨3121-1、3121-2枢转地固定到上部子框架3100a的角板3012-1、3012-2,如以上参照图44所描述的。侧导轨3121-1、3122-2中的每个都包括用于接收螺纹连接器3006的后孔口3007,如以上参照图44所描述的。
163.图49示出第一连杆3200-1和第二连杆3200-2的分解的后透视图。第一连杆3200-1和第二连杆3200-2可以通过前板3202和后板3204连接。前板3202和后板3204中的每个都可以包括侧凸片3203,其被接收在连杆3200-1、3200-2中的侧凸片凹口3205内。可以提供加劲板3206来加强前板3202。加劲板3206可以包括凸片3207,其被接收在前板3202和连杆3200-1、3200-2中的凸片狭槽3208内。应当理解,并非使用凸片和狭槽来连接中间子框架3100b的各个零件,而是可以通过焊接或通过螺栓连接件来连接中间子框架3100b的各个零件。或者,中间子框架3100b可以例如通过铸造被制造为单个零件。前板构件3202可以包括用于接收螺纹连接器(未示出)的孔口3210,用于将第一气囊致动器3302和第二气囊致动器3304附接到所述前板构件3202(参见图46)。
164.图50示出下部子框架3100c的分解的后透视图。下部子框架3100c包括第一清垄器轮支撑臂3130-1和第二清垄器轮支撑臂3130-2,它们通过前板3132被连接在其前端部处。前板3132可以包括侧凸片3133,其被接收在第一清垄器轮支撑臂3130-1和第二清垄器轮支撑臂3130-2中的侧凸片狭槽3134内。后板3136可以被设置为侧向地约束清垄器轮支撑臂3130-1、3130-2的后端部。后板3136可以包括侧凸片3137,其被接收在清垄器轮支撑臂3130-1、3130-2中的侧凸片狭槽3138内。应当理解,并非使用凸片和狭槽来连接下部子框架3100c的各个零件,而是可以通过焊接或通过螺栓连接件来连接下部子框架3100c的各个零件。或者,下部子框架3100c可以例如通过铸造被制造为单个零件。清垄器轮支撑臂3130-1、3130-2中的每个还包括开口3026,所述开口3026与后支柱子框架3100d中的用于接收螺纹连接器3024的孔口3025对准,用于将下部子框架3100c枢转地附接到后支柱子框架3100d(参见图45)。每个清垄器轮支撑臂3130-1、3130-2还包括孔口3008、3017,用于接收相应的中间子框架3100b的相应的螺纹连接器3006、3008和连杆3200-1、3200-2,如以上参照图44所描述的。第一清垄器轮支撑臂3130-1和第二清垄器轮支撑臂3130-2中的每个都包括正方形开口3135,用于接收清垄器轮轴螺栓3061-1、3061-2中的相应一者的正方形柄部分,如稍后将更详细地讨论的。前板3132可以包括用于稍后讨论的深度选择器3400的凸片狭槽3153。
165.图51是后支柱子框架3100d的后透视图。后支柱子框架3100d包括第一支柱3140-1和第二支柱3140-2,所述第一支柱3140-1和第二支柱3140-2在其后端部处由侧板3142间隔开。侧板3142可以包括凸片3143,其被接收在第一支柱3140-1和第二支柱3140-2中的每个的狭槽3144内。或者,侧板3142可以通过焊接或螺栓连接件附接到支柱3140-1、3140-2。或者,支柱3140-1、3140-2和侧板3142可以例如通过铸造被制造为单个零件。支柱3140-1、3140-2中的每个都包括用于接收轴轮螺栓3051的孔口3022,如以上参照图44所描述的。在该实施例中,支柱3140-1、3140-2中的每个都包括向前延伸的臂3141-1、3141-2,所述向前延伸的臂3141-1、3141-2由交叉构件3152连结在其前端部处。交叉构件3152包括用于稍后讨论的深度选择器3400的孔口3153。
166.后支柱子框架3100d可以包括刮板3145,以去除在操作过程中会堆积在导轮3050上的泥土或碎块。刮板3145可以被附接到在后支柱子框架3100d的后支柱3140-1、3140-2之间的侧板3142,并且可以包括具有弧形边缘3146的板,所述弧形边缘3146近似于导轮3050的轮廓(参见图35)。刮板3145可以借助螺纹连接器3148被附接到侧板3142,所述螺纹连接器3148延伸通过细长孔3147,所述细长孔3147与侧板3142中的内螺纹孔口3149对准。细长孔3147将允许刮板3145相对于侧板3142可调节地定位,以改变与导轮3050的距离,来适应不同的导轮尺寸和轮廓以及考虑到导轮胎面和刮板3145的磨损。
167.参照图45的分解图,深度选择器3400使下部子框架3100c的角度或位置能够相对于后支柱子框架3100d被选择性调节。深度选择器3400包括侧向间隔的带钩臂3402-1、3402-2,每个所述带钩臂都具有形成在其上表面上的多个凹口3404。带钩臂3402-1、3402-2中的每个都可以通过在下部子框架3100c的前板3132中的凸片狭槽3406内接收的凸片3405附接到下部子框架3100c。或者,带钩臂3402-1、3402-2可以通过任何合适的措施(诸如通过焊接或栓接)附接到下部子框架3100c。如与图45结合的图43所示,带钩臂3402-1、3402-2在后支柱子框架3100d的前交叉构件3152上延伸。每个带钩臂3402-1、3402-2都包括前抵靠部
3408和后抵靠部3410。参照图43,应当理解,抵靠部3408、3410将与前交叉构件3152接合,限制了可以由下部子框架3100c绕螺纹连接器3024的轴线旋转的旋转角度,所述螺纹连接器3024将下部子框架3100c与后支柱子框架3100d枢转地连接。手柄3412被附接到手柄轴3414。手柄轴3414穿过侧向间隔的带钩臂3402-1、3402-2之间,并且通过轴环3415和通过在后支柱子框架3100d的前端部中的孔口3153延伸。弹簧3416被接收在手柄轴3414的端部上并且由垫圈3417和夹子3418保留。弹簧3416向下地偏压手柄3412,使得手柄3412被接收在带钩臂3402-1、3402-2的上表面中的多个凹口3404之一内。
168.为了调节下部子框架3100c相对于后支柱子框架的角度或位置(从而增大或减小由清垄器轮3060-1、3060-2穿透到土壤中的深度),操作员抓住手柄3412并且施加向上的力以促使弹簧3416压缩,使手柄3412从凹口3402脱离。在手柄从凹口脱离的情况下,操作员可以将下部子框架3100c相对于后支柱子框架3100d绕螺纹连接器3024的轴线枢转,从而将下部子框架3100c与后支柱子框架3100d枢转地连接。一旦下部子框架处于期望的角度或位置,操作员就释放手柄3412上的向上的压力,并且弹簧偏压将手柄3412重新落座在相对应的凹口3404内,从而将下部子框架3100c牢固地保留在与期望的清垄器轮深度相对应的、相对于后支柱子框架3100d的期望的角度或位置处。
169.参照图43,在清垄器轮支撑臂3130-1、3130-2中的每个中的正方形开口3135被配置为接收清垄器轮轴螺栓3061-1、3061-2的正方形柄部分(未示出,但参见图27作为示例)。正方形开口3135与清垄器轮轴螺栓3061-1、3061-2的正方形柄部分协作,以将清垄器轮轴螺栓3061-1、3061-2旋转地约束到清垄器轮支撑臂3130-1、3130-2。每个清垄器轮轴螺栓3061-1、3061-2都通过相应的第一清洁器轮3060-1和第二清洁器轮3060-2中的每个内的中心开口3064延伸。在每个清垄器轮轴螺栓3061-1、3061-2的端部上接收衬套3065,并且衬套被接收在具有中心开口3071的轮毂3070内。轮毂3070通过螺母3072被固定到相应的第一清垄器轮3060-1和第二清垄器轮3060-2,所述螺母3072被可螺纹地接收在螺纹连接器3074上,所述螺纹连接器3074通过在清垄器轮3060-1、3060-2中的孔口3066和通过轮毂3070中的对准孔3073延伸。凸耳螺母3075可螺纹地接收轮轴螺栓3061-1、3061-2的端部,从而将清垄器轮3060-1、3060-2轴向地约束到相应的清垄器轮轴螺栓3061-1、3061-2上,而衬套3065允许清垄器轮3060-1、3060-2绕相应的清垄器轮轴螺栓3061-1、3061-2自由地旋转。可以在清垄器轴螺栓3061-1、3061-2上设置间隔物(未示出),以将清垄器轮3060-1、3060-2远离清垄器轮支撑臂3130-1、3130-2向外地定位。图43还示出刮板3076,所述刮板3076可以被设置在清垄器轴螺栓3061-1、3061-2上,以在清垄器轮3060-1、3060-2旋转时从其刮去污垢或泥浆。
170.参照图35和图44,导轮轴螺栓3051通过在后支柱子框架3100d中的孔口3022和通过导轮3050的轮毂3052(图35)延伸。间隔物衬套3053(图44)可以在轮毂3052的每一侧上被设置在导轮轴螺栓3051上,以保持导轮3050在支柱3040-1、3040-2之间居中。将螺母3054经螺纹连接到导轮轴螺栓3051的端部上,从而将导轮3050固定到后支柱子框架3100d。
171.参照图44和图46,致动器系统3300可以包括第一气囊3302和第二气囊3304,它们设置在中间子框架3100b内并且与连杆3200-1、3200-2协作。第一气囊3302在其后端部处在第二气囊3304的后方连接到中间子框架3100b的后板3122,并且在其前端部处连接到在第一连杆3200-1和第二连杆3200-2之间的侧板3202。第二气囊3404在其后端部处连接到相同
的侧板3202,并且在其前端部处连接到中间子框架3100b的前板3120。如图52a示意性地所示,随着在第一或后部气囊3302中的压力增大而促使第一或后部气囊3302膨胀和促使第二或前部气囊3404塌陷,将施加下压力和向下的旋转运动,如由图52a中的方向箭头所指示,向下地加压下部子框架3100c和后支柱子框架3100d(如用相对于实线的虚线表示),促使导轮3050和清垄器轮3060-1、3060-2向下地运动或对土壤40施加更大的下压力。相反地,如图52b中示意性地所示,随着在第二和前部气囊3404中的压力增大而促使第二和前部气囊3404膨胀和促使第一或后部气囊3302塌陷,将施加上升力和向上的旋转运动,如由图52b中的方向箭头所指示,向上地加压下部子框架3100c和后支柱子框架3100d(如用相对于实线的虚线表示),促使导轮3050和清垄器轮3060-1、3060-2向上地运动或对土壤40施加更小的下压力。因此,应当理解,通过增大和减小第一气囊3302和第二气囊3304中的气压,促使它们分别地膨胀和收缩,可以实现施加到导轮3050和清垄器轮3060-1、3060-2上的期望的下压力的量。
172.第一致动器3302和第二致动器3304可以是任何类型的单作用或双作用致动器,其可以被配置为提供可调节的下压力和任选的上升力,包括气动缸、液压缸、气囊和机电致动器,而不是用于致动器系统3300的气囊。在又一些其它实施例中,可以利用单作用致动器,例如,气囊和前弹簧组件,类似于以上关于第二清垄器组件实施例2000描述的弹簧组件2300。由致动器系统3300施加在导轮3050和清垄器轮3060-1、3060-2上的下压力可以由控制器(例如,在美国专利号8,550,020中引用的“控制器300”)或由流体控制端口(例如,在pct公布no.wo2300/056395中描述的“流体控制端口10”)控制。种植机10的每个清垄器组件3000的致动器系统3300都可以被逐行地控制,或者由种植机10的部分作为组来控制,或者在整个种植机10上被集体地控制。
173.期望的下压力的量可以是土壤条件和作物残茬的量或类型以及将清垄器轮3060为与土壤接合所设定的深度的函数。例如,在干燥的土壤条件下,可以期望有更大的下压力,使得导轮3050将在开口组件234的前方更夯实地包装土壤40,以用于形成更好的种子沟槽38并且在种子被沉积之前防止或最小化土壤落入种子沟槽38中。可替代地,在潮湿的土壤条件下,可以期望有更小的下压力。下压力监控系统(稍后讨论)可以被用于确定和调节由致动器系统3300所施加的下压力。
174.图53是种植机垄单元200的侧视图,如先前以上参照图2所描述的,但是带有由附图标记4000指定的清垄器组件的又一个实施例。清垄器组件4000被安装到工具条14,并且被定位在开沟组件234的前方。再次,应当理解,种植机10的每个垄单元200都将具有相关联的清垄器组件4000,其与垄单元200的相应的开沟组件234纵向地对准。在所示的实施例中,清垄器组件4000包括导轮4050(如图54所示)。清垄器组件4000朝向工具条14的后方延伸,并且通过合适的安装结构被刚性地安装到工具条14的前侧,所述安装结构可以包括一对安装支架4101,所述一对安装支架4101与固定到工具条14的板或角撑板栓接。或者,清垄器组件4000可以通过任何合适的安装结构或连接件(包括螺栓支架或通过焊接)安装到工具条14的顶侧、后侧或下侧。
175.图53a示出由附图标记4000a指定的清垄器组件的可替代实施例。清垄器组件4000a的实施例基本与清垄器组件4000的实施例相同,除了4000a的实施例不包括导轮4050以外。此外,4000a的实施例可以省略后支柱子框架4100b(稍后描述)。
176.图54是图53所示的清垄器组件4000的放大的后透视图。图54a的视图与图54中的视图相同,但是示出没有导轮4050和没有后支柱子框架4100d的清垄器组件4000a的实施例(稍后讨论)。由于清垄器组件4000和4000a这两个实施例是基本相同的,所以除了在实施例4000a中去除导轮(以及任选地稍后讨论的后支柱子框架4100d)之外,仅描述实施例4000,应认识到,对导轮4050、导轮轴4051和相关联的部件的任何参考都将不适用于4000a实施例。
177.图55和图56分别是清垄器组件4000的右侧视图和左侧视图。图57和图58分别是前视图和后视图,并且图59和图60分别是俯视图和仰视图。清垄器组件4000包括在其后端部处由导轮4050支撑的框架组件4100。清垄器轮4060-1、4060-2由框架组件4100可旋转地支撑。每个清垄器轮4060-1、4060-2都包括围绕其圆周的径向间隔的尖齿4062。清垄器轮4060-1、4060-2被取向为向外地和向后地发散,使得清垄器轮4060-1、4060-2的尖齿4062在它们旋转时在前端部处交错。在操作中,随着种植机10在向前行进的方向11上运动,土壤与尖齿4062接合,促使清垄器轮4060-1、4060-2旋转。由于其取向,随着清垄器轮4060-1、4060-2旋转,它们将任何作物残茬、土块或其它碎块侧向向外地指引,以便为向后对准的开沟组件234提供清垄器苗床。在沟槽38被开沟组件234打开之前,导轮4050用于夯实会被清垄器轮4060-1、4060-2扰乱的土壤40。用导轮4050夯实土壤在干燥的土壤中会有利于防止土壤40落入沟槽38中。
178.在框架组件4100内定位有致动器系统4300,以便为导轮4050和清垄器轮4060-1、4060-2提供可调节的下压力和任选的上升力。在该实施例中,致动器系统4300利用两个气囊4302和4304(图63),但是致动器系统4300可以利用提供可调节的下压力和任选的上升力的任何致动器,包括气动缸、液压缸、气囊和机电致动器,如稍后将更详细地讨论的。
179.图61是框架组件4100的后透视图,为清晰起见,去除了导轮4050、清垄器轮4060-1、4060-2。图62是在去除了导轮4050和致动器系统4300以及第一清垄器轮4060-1的情况下的框架组件4100的前透视图,但是示出第二清垄器轮4060-2及其安装部件的分解图。图63是框架组件4100的分解的后透视图。参照61至图64,框架组件4100包括上部子框架4100a、中间子框架4100b、下部子框架4100c、后支柱子框架4100d以及第一连杆4200-1和第二连杆4200-2。后支柱子框架4100d包括下部子框架4100c的一部分。图64是示出下部子框架4100c和后支柱子框架4100d的分解的前透视图。图65示出中间子框架3100b和连杆3200-1、32002与致动器组件4300的第一气囊4302和第二气囊4304的透视图。稍后将更详细地描述子框架4100a、4100b、4100c、4100d和连杆4200-1、4200-2。
180.如图63最好地所示,中间子框架4100b在其前端部处通过在相应的中间子框架4100b与上部子框架4100a中的对准孔口4003、4004内接收的螺纹连接器4002枢转地连接到上部子框架4100a。螺纹连接器4002和孔口4003、4004可以如在先前的实施例1000、2000中所示的那样经螺纹连接。或者,如图所示,在中间子框架4100b中的孔口4003可以是正方形孔口,其接收螺纹连接器4002的正方形柄部分。在上部子框架4100a中的孔口4004的尺寸可以被设定为接收套接衬套4010,所述套接衬套4010由在螺纹连接器4002的螺纹端部上接收的螺母4011保留。中间子框架4100b在其后端部处通过在相应的中间子框架4100b中和在下部子框架4100c中的孔口4007、4008内接收的螺纹连接器4006枢转地连接。螺纹连接器4006和孔口4007、4008可以如在先前的实施例1000、2000中所示的那样经螺纹连接。或者,如图
所示,在中间子框架4100b中的孔口4007可以是正方形孔口,其接收螺纹连接器4006的正方形柄部分。在下部子框架4100c中的孔口4008的尺寸可以被设定为接收套接衬套4010,所述套接衬套4010由在螺纹连接器4006的螺纹端部上接收的螺母4011保留。
181.第一连杆4200-1和第二连杆4200-2在其前端部处通过在相应的第一连杆4200-1和第二连杆4200-2与上部子框架4100a中的对准孔口4013、4014内接收的螺纹连接器4012枢转地连接到上部子框架4100a。螺纹连接器4012和孔口4013、4014可以如在先前的实施例1000、2000中所示的那样经螺纹连接。或者,如图所示,在连杆4200-1、4200-2中的孔口4013可以是正方形孔口,其接收螺纹连接器4012的正方形柄部分。在上部子框架4100a中的孔口4014的尺寸可以被设定为接收套接衬套4010,所述套接衬套4010由在螺纹连接器4012的螺纹端部上接收的螺母4011保留。第一连杆4200-1和第二连杆4200-2在其后端部处通过在相应的第一连杆4200-1和第二连杆4200-2与下部子框架4100c中的对准孔口4017、4018内接收的螺纹连接器4016枢转地连接到下部子框架4100c。螺纹连接器4016和孔口4017、4018可以如在先前的实施例1000、2000中所示的那样经螺纹连接。或者,如图所示,在连杆4200-1、4200-2中的孔口4017可以是正方形孔口,其接收螺纹连接器4016的正方形柄部分。在下部子框架4100c中的孔口4018的尺寸可以被设定为接收套接衬套4010,所述套接衬套4010由在螺纹连接器4016的螺纹端部上接收的螺母4011保留。
182.后支柱子框架4100d通过在相应的后支柱子框架4100d与下部子框架4100c中的对准孔口4025、4026(参见图63)内接收的螺纹连接器4024枢转地连接到下部子框架4100c。如图62和图64中最好地所示,后支柱子框架4100d也通过深度选择器4400与下部子框架4100c链接(稍后讨论)。应当理解,上部子框架4100a与中间子框架4100b和连杆4200-1、4200-2的向前枢转连接连同中间子框架4100b和连杆4200-1、4200-2与下部子框架4100c的向后枢转连接一起提供了四杆连杆机构,所述四杆连杆机构允许中间子框架4100b和下部子框架4100c相对于刚性地固定到工具条14的上部子框架4100a竖向地运动。应当显而易见,在4000a实施例中,整个后支柱子框架4100d可以被省略,这是由于后支柱子框架4100d的主要目的是支撑在4000a实施例中不存在的导轮4050。然而,如稍后详细地解释的,后支柱子框架4100d与下部子框架4100c协作,以经由深度选择器4400实现深度选择。因此,如果期望有深度选择,则清垄器组件4000a的实施例可以与后支柱子框架4100d一起使用,从而仅仅省略导轮4050和导轮轴螺栓4051。
183.图66示出上部子框架4100a的前透视图。在该实施例中,上部子框架4100a被示出为整体式铸造构件,但是它可以由通过凸片和狭槽连接的各个零件制成,如结合以上实施例1000、2000、3000所描述的,或者各个零件可以通过焊接或通过栓接连接件连结。上部子框架4100a包括第一角撑板4102-1和第二角撑板4102-2,它们从顶板或顶表面4101向下地延伸并且由前板或表面4104侧向地间隔开。角撑板4102-1、4102-2包括分别用于接收螺纹连接器4002、4012的孔口4004、4014,分别用于附接中间子框架4100b和导轨4200-1、4200-2,如以上参照图63所描述的。
184.图63和图68分别示出中间子框架4100b的后透视图和前透视图。再次,在该实施例中,中间子框架4100b被示出为整体式铸造构件,但是它可以由通过凸片和狭槽连接的各个零件制成,如结合以上实施例1000、2000、3000所描述的,或者各个零件可以通过焊接或通过栓接连接件连结。中间子框架4100b包括前基部构件4120和后基部构件4122以及第一侧
导轨4121-1和第二侧导轨4121-2。前基部构件4120包括孔口4125,第一气囊4302的接头通过所述孔口4125延伸并且接收配件4126(图62),所述配件4126将第二气囊4304可螺纹地固定到前基部构件4120。后基部构件4122包括孔口4127,第一气囊4302的接头通过所述孔口4127延伸并且接收配件4128(图65),所述配件4128将第一气囊4302可螺纹地固定到后基部构件4122。侧导轨4121-1、4122-2中的每个都包括用于接收螺纹连接器4002的前孔口4003,用于将中间子框架4100b的侧导轨4121-1、4121-2枢转地固定到上部子框架4100a的角撑板4102-1、4102-2,如以上参照图63所描述的。侧导轨4121-1、4122-2中的每个都包括用于接收螺纹连接器4006的后孔口4007,如以上参照图63所描述的。
185.图63和图67分别示出第一连杆4200-1和第二连杆4200-2的后透视图和前透视图。再次,在该实施例中,第一连杆4200-1和第二连杆4200-2被示出为例如通过铸造被连结为整体式构件,但是连杆可以由通过凸片和狭槽连接的各个零件制成,如结合以上实施例3000所描述的,或者各个零件可以通过焊接或通过栓接连接件连结。第一连杆4200-1和第二连杆4200-2可以由前板4202连接。前板可以包括用于接收螺纹连接器(未示出)的孔口4203,用于分别将第一气囊4302和第二气囊4304的前端部和后端部附接到前板。一个或多个侧向构件4204可以连接在第一连杆4200-1和第二连杆4200-2之间,以提供结构刚度。连杆4200-1、4200-2中的每个都包括用于接收螺纹连接器4012的前孔口4013,用于将连杆4200-1、4200-2枢转地固定到上部子框架4100a的角撑板4102-1、4102-2,如以上参照图63所描述的。连杆4200-1、4200-2中的每个都包括用于接收螺纹连接器4016的后孔口4017,如以上参照图63所描述的。
186.图69示出下部子框架4100c的前透视图。再次,在该实施例中,下部子框架4100c被示出为整体式铸造构件,但是它可以由通过凸片和狭槽连接的各个零件制成,如结合以上实施例1000、2000、3000所描述的,或者各个零件可以通过焊接或通过栓接连接件连结。下部子框架4100c包括第一清垄器轮支撑臂4130-1和第二清垄器轮支撑臂4130-2,它们连接在它们的前端部处。后侧向构件4134可以在支撑臂4120-1、4120-2的后端部之间延伸,以提供结构刚度。弧形面板4138横过清垄器轮支撑臂4130-1、4130-2朝向其前端部延伸。弧形面板4138包括具有凹口的开口4402,稍后将结合深度调节器4400的描述更详细地讨论。清垄器轮支撑臂4130-1、4130-2中的每个还包括开口4026,所述开口与后支柱子框架4100d中的孔口4025对准,用于接收销4024,用于将下部子框架4100c枢转地附接到后支柱子框架4100d(参见图64)。每个清垄器轮支撑臂4130-1、4130-2还包括用于接收相应的螺纹连接器4006、4016的孔口4008、4018,用于连接相应的中间子框架4100b和连杆4200-1、4200-2,如以上参照图63所描述的。第一清垄器轮支撑臂4130-1和第二清垄器轮支撑臂4130-2中的每个还包括用于接收清垄器轮轴螺栓4061-1、4061-2的孔口4135。可以设置沿着清垄器轮支撑臂4130-1、4130-2间隔的多个孔口4135,以允许清垄器轮依据清垄器轮的尺寸或配置而根据期望被向前地或向后地定位。在一个实施例中,如图62最好地所示,过大尺寸的矩形开口4155可以被形成或制造在清垄器轮支撑臂4130-1、4130-2中,以接收其中具有孔口4135的矩形斜垫圈4156,以接收清垄器轮轴螺栓4060-1、4060-2。斜垫圈4156可以具有不同的斜面螺距,所述不同的斜面螺距可以被取向在矩形开口内,以便根据现场条件为清垄器轮提供不同的倾斜角度(例如,俯仰、滚转或横摆)。
187.图70是后支柱子框架4100d的后透视图。再次,在该实施例中,后支柱子框架4100d
被示出为整体式铸造构件,但是它可以由通过凸片和狭槽连接的各个零件制成,如结合以上实施例1000、2000、3000所描述的,或者各个零件可以通过焊接或通过栓接连接件连结。后支柱子框架4100d包括第一支柱4140-1和第二支柱4140-2。侧向构件4142可以在支柱4140-1、4140-2之间延伸。支柱4140-1、4140-2中的每个都包括用于接收轴轮螺栓4051的孔口4022,如以上参照图63所描述的。在该实施例中,支柱4140-1、4140-2中的每个都包括向前延伸的臂4141-1、4141-2,所述向前延伸的臂4141-1、4141-2在其前端部处通过纵向间隔的第一和交叉构件4152、4154连结。第一交叉构件4152包括第一孔口4153,并且第二交叉构件4154包括与第一孔口4153纵向对准的第二孔口4155。孔口4153和4155被配置为接收稍后讨论的深度选择器4400。
188.后支柱子框架4100d可以包括刮板4145,以去除在操作过程中会堆积在导轮4050上的泥土或碎块。刮板4145可以被附接到在支柱4140-1、4140-2之间的侧向构件4142,并且可以包括具有弧形边缘4146的板,所述弧形边缘4146近似于导轮4050的轮廓(参见图58)。刮板4145可以借助螺栓4148被附接到侧向构件4142,所述螺栓4148通过侧向构件4142中的孔口4149和通过刮板4147中的细长孔延伸并且由螺母4150固定。细长孔4147允许刮板4145相对于侧板4142可调节地定位,以改变与导轮4050的距离,来适应不同的导轮尺寸和轮廓以及考虑到导轮胎面和刮板4145的磨损。
189.参照图64的分解图,深度选择器4400使下部子框架4100c的角度或位置能够相对于后支柱子框架4100d被选择性调节。深度选择器4400包括手柄4404,其附接到基部4406。轴4408从基部4406向下地延伸。基部4406还包括向下延伸的侧向间隔的销钉4410,其落座在下部子框架4100c的弧形面板4138中的具有凹口的开口4402的凹口内。轴4408通过具有凹口的开口4402和通过第一和第二交叉构件4152中的第一孔口4153延伸并且落座在后支柱子框架4100d的第二交叉构件4154中的第二孔口4155中。在后支柱子框架4100d的第一交叉成员4152和第二交叉构件4154之间在轴4408上保留弹簧(未示出)。为了调节下部子框架3100c相对于后支柱子框架4100d的角度或位置(从而增大或减小由清垄器轮4060-1、4060-2穿透到土壤中的深度),操作员抓住手柄4404并且施加向上的力以促使弹簧压缩,使销钉4410从具有凹口的开口4402的凹口4402脱离。在销钉4410从凹口脱离的情况下,操作员可以将下部子框架4100c相对于后支柱子框架4100d绕销4024的轴线枢转,从而将下部子框架4100c与后支柱子框架4100d枢转地耦接。一旦下部子框架4100c处于期望的角度或位置,操作员就释放手柄4404上的向上的压力,并且弹簧偏压将销钉4410重新落座在具有凹口的开口4402的凹口内,从而将下部子框架4100c牢固地保留在与期望的清垄器轮深度相对应的、相对于后支柱子框架4100d的期望的角度或位置处。
190.参照图62,第一清垄器轮4060-1和第二清垄器轮4060-2分别用清垄器轮轴螺栓4061-2、4061-2固定到下部子框架4100c的第一清垄器轮支撑臂4030-1和第二清垄器轮支撑臂4030-2。每个清垄器轮轴螺栓4061-1、4061-2都通过在相应的第一清洁器轮4060-1和第二清洁器轮4060-2中的每个内的中心开口4064延伸。在每个清垄器轮轴螺栓4061-1、4061-2的端部上接收衬套4065,并且衬套被接收在具有中心开口4071的轮毂4070内。轮毂4070通过螺母4072被固定到相应的第一清垄器轮4060-1和第二清垄器轮4060-2,所述螺母4072被可螺纹地接收在螺纹连接器4074上,所述螺纹连接器4074通过在清垄器轮4060-1、4060-2中的孔口4066和通过轮毂4070中的对准孔4073延伸。在清垄器轮支撑臂4030-1、
4030-2的后侧上的螺母4075接收轮轴螺栓4061-1、4061-2的端部,从而将清垄器轮4060-1、4060-2轴向地约束到相应的清垄器轮轴螺栓4061-1、4061-2上,而衬套4065允许清垄器轮4060-1、4060-2绕相应的清垄器轮轴螺栓4061-1、4061-2自由地旋转。可以在清垄器轴螺栓4061-1、4061-2上设置间隔物4063和垫圈,以将清垄器轮4060-1、4060-2远离清垄器轮支撑臂4130-1、4130-2向外地定位。图62还示出刮板4076,所述刮板4076可以被设置在清垄器轴螺栓4061-1、4061-2上,以在清垄器轮4060-1、4060-2旋转时从其刮去污垢或泥浆。
191.参照图54和图61,导轮轴螺栓4051通过在后支柱子框架4100d中的孔口4022和通过导轮4050的轮毂延伸。间隔物衬套4053(图61)可以在轮毂的每一侧上被设置在导轮轴螺栓4051上,以保持导轮4050在支柱4040-1、4040-2之间居中。将螺母4054经螺纹连接到导轮轴螺栓4051的端部上,从而将导轮4050固定到后支柱子框架4100d。
192.参照图63和图65,致动器系统4300可以包括第一气囊4302和第二气囊4304,它们设置在中间子框架4100b内并且与连杆4200-1、4200-2协作。第一气囊4302在其后端部处在第二气囊4304的后方连接到中间子框架4100b的后板4122,并且在其前端部处连接到在第一连杆4200-1和第二连杆4200-2之间的侧向构件4202。第二气囊4304在其后端部处连接到相同的侧向构件4202,并且在其前端部处连接到中间子框架4100b的前板4120(图68)。致动器系统4300关于向导轮4050和清垄器轮4060-1、4060-2施加下压力和上升力的操作以与以上结合清垄器组件3000的实施例所解释的方式基本相同的方式操作,以上参照52a和图52b来描述清垄器组件3000的实施例,并且因此将在此处不再重复。
193.第一致动器4302和第二致动器4304可以是任何类型的单作用或双作用致动器,其可以被配置为提供可调节的下压力和任选的上升力,包括气动缸、液压缸、气囊和机电致动器,而不是用于致动器系统4300的气囊。在又一些其它实施例中,可以利用单作用致动器,例如,气囊和前弹簧组件,类似于以上关于第二清垄器组件实施例2000描述的弹簧组件2300。由致动器系统4300施加在导轮4050和清垄器轮4060-1、4060-2上的下压力可以由控制器(例如,在美国专利号8,550,020中引用的“控制器300”)或由流体控制端口(例如,在pct公布no.wo2300/056395中描述的“流体控制端口10”)控制。种植机10的每个清垄器组件4000的致动器系统4300都可以被逐行地控制,或者由种植机10的部分作为组来控制,或者在整个种植机10上被集体地控制。
194.期望的下压力的量可以是土壤条件和作物残茬的量或类型以及将清垄器轮4060为与土壤接合所设定的深度的函数。例如,在干燥的土壤条件下,可以期望有更大的下压力,使得导轮4050将在开口组件234的前方更夯实地包装土壤40,以用于形成更好的种子沟槽38并且在种子被沉积之前防止或最小化土壤落入种子沟槽38中。可替代地,在潮湿的土壤条件下,可以期望有更小的下压力。下压力监控系统(稍后讨论)可以被用于确定和调节由致动器系统4300所施加的下压力。
195.可替代的安装布置
196.图71示出可以与上述的清垄器组件1000、1000a、2000、2000a、3000、3000a、4000、4000a的实施例中的任一者一起使用的可替代的安装布置。并非如图2、图2a、图18、图18a、图34、图34a、图53、图53a所示将清垄器组件1000、1000a、2000、2000a、3000、3000a、4000、4000a安装到工具条14,清垄器组件1000、1000a、2000、2000a、3000、3000a、4000或4000a可以被安装到垄单元框架柄254,或者用如图71所示的安装支架220被安装到垄单元框架210
的其它结构构件。尽管图71被示出为使用清垄器组件1000的实施例,但是如由本领域的技术人员所认识的,相同的或相似的安装结构将适用于清垄器组件1000、1000a、2000、2000a、3000、3000a、4000、4000a的实施例全部。因此,并非包括用于每个清垄器组件实施例(该可替代的安装布置可以适用于所述每个清垄器组件实施例)的单独的附图,而是图71包括与清垄器组件1000、1000a、2000、2000a、3000、3000a、4000、4000a中的每个相对应的附图标记,以表示可以使用安装支架220安装那些实施例中的每个。
197.图72示出可以与上述的清垄器组件1000、1000a、2000、2000a、3000、3000a、4000、4000a的实施例中的任一者一起使用的另一个可替代实施例。在该布置中,清垄器组件通常由附图标记5000指定并且被示出为类似于清垄器组件2000,其原因在于清垄器组件利用与清垄器实施例2000相同的后支柱子框架2100d、下部子框架2100c、导轮2050和清垄器轮2060-1、2060-2。然而,在该实施例中,将上部子框架2100a、中间子框架2100b、连杆2200-1、2200-2去除并且用平行臂连杆5002替代。平行臂连杆5002在其后端部处枢转地连接到垄单元支架5004,所述垄单元支架5004附接到垄单元框架210。在实施例2000中若是将中间子框架2100b和连杆2200-1、2200-2枢转地连接在一点处,在相同的所述点处将平行臂连杆5002的前端部枢转地附接到后支柱子框架2100d和下部子框架2100c。致动器系统2300被去除并且用致动器系统5300替代,所述致动器系统5300被连接在支架构件5006和平行臂连杆5002之间,以向导轮2050和清垄器轮2060-1、2060-2提供期望的下压力和任选的上升力。致动器系统5300可以利用提供可调节的下压力和任选的上升力的任何致动器,包括气动缸、液压缸、气囊和机电致动器。由致动器系统5300施加的下压力和任选的上升力可以由控制器(例如,在美国专利号8,550,020中引用的“控制器300”)或由流体控制端口(例如,在pct公布no.wo2020/056395中描述的“流体控制端口10”)。包括致动器系统5300的致动器都可以被逐行地控制,或者由种植机10的部分作为组来控制,或者在整个种植机10上被集体地控制。
198.尽管未被单独地说明,但是相同的或基本类似的修改方案可以与垄单元组件1000、1000a、2000、2000a、3000、3000a、4000、4000a中的每个一起使用。并非包括用于每个清垄器组件实施例(所述每个清垄器组件实施例可以利用该可替代实施例5000)的单独的附图,而是图72包括与清垄器组件1000、1000a、2000、2000a、3000、3000a、4000、4000a中的每个相对应的附图标记,以表示那些实施例中的每个都可以适于利用如图72中所示和所述的可替代实施例5000。例如,在利用垄单元组件1000或1000a时,上部子框架1100a、中间子框架1100b、连杆1200-1和1200-2可以被去除并且被替换为平行臂连杆5002,并且致动器系统1300可以被去除并且被替换为如在以上段落中所述的致动器系统5300。类似地,在利用垄单元组件3000时,中间子框架3100b、连杆3200-1、3200-2可以被去除并且被替换为安装到下部子框架3100c的平行臂连杆5002,并且致动器系统3300可以被替换为如在以上段落中所述的致动器系统5300。类似地,在利用垄单元组件3000a(即,没有导轮3050)时,上部子框架3100a、中间子框架3100b、连杆3200-1、3200-2(以及任选的后支柱子框架3100d)可以被去除并且被替换为安装到下部子框架3100c的平行臂连杆5002,并且致动器系统3300可以被替换为如在以上段落中所述的致动器系统5300。同样地,在利用垄单元组件4000时,上部子框架4100a、中间子框架4100b和连杆4200-1、4200-2可以被去除并且被替换为安装到下部子框架4100c的平行臂连杆5002,并且致动器系统4300可以被替换为如上所述的致动器系统5300。类似地,在利用垄单元组件4000a(即,没有导轮4050)时,上部子框架4100a、中
间子框架4100b、连杆4200-1、4200-2(以及任选的后支柱子框架4100d)可以被去除并且被替换为安装到下部子框架4100c的平行臂连杆5002,并且致动器系统4300可以被替换为致动器系统5300。
199.第三清垄器轮组件
200.图73至图80示出包括第三清垄器轮组件6010的实施例的清垄器组件6000的又一个实施例。虽然图73至图79示出利用清垄器组件4000的实施例的清垄器组件6000,但是应当理解,如前所述的清垄器组件1000、1000a、2000、2000a、3000、3000a、4000a、5000的其它实施例中的任一个都可以被配置为包括第三清垄器轮组件6010。因此,并非包括用于每个清垄器组件实施例的单独的多组附图,而是图73至图80包括与清垄器组件框架1100、2100、3100、4100中的每个相对应的附图标记,并且它们的相应的部件可以适于包括第三清垄器轮组件6010。
201.图73是包括第三清垄器轮组件6010的实施例的清垄器组件6000的后透视图。图74是图73的清垄器组件6000的前透视图。图75和图76分别为图73的清垄器组件6000的右侧视图和左侧视图。图77和图78分别为图73的清垄器组件6000的俯视图和仰视图。图79是图73的清垄器组件6000的分解的右前透视图。图80是图73的清垄器组件6000的分解的左前透视图。
202.参照图79和图80,安装条6080被配置为在螺纹连接器6081延伸通过安装条6080中的孔口6082的情况下安装到下部子框架1100c、2100c、3100c、4100c,所述孔口6082与在相应的清垄器轮支撑臂1030-2、2030-2、3030-2、4030-2中的孔口1035、2025、3025、4035对准。在下部子框架1100c、2100c、3100c、4100c的后侧上的螺母6083接收螺纹连接器6081以将安装条6080固定到下部子框架1100c、2100c、3100c、4100c。安装条6080包括后孔口6084,用于以与先前当将第二清垄器轮1060-2、2060-2、3060-2、4060-2安装到相应的下部子框架1100c、2100c、3100c、4100c的清垄器轮支撑臂1030-2、2030-2、3030-2、4030-2时所描述的方式相同的方式经由第二清垄器轴螺栓1061-2、2061-2、3061-2、4061-2将第二清垄器轮1060-2、2060-2、3060-2、4060-2安装到安装条6080。在可替代实施例中,安装条6080可以包括用于对准和接收衬套的扩大的孔口6086,用于将第二清垄器轮1060-2、2060-2、3060-2、4060-2固定到相应的下部子框架1100c、2100c、3100c、4100c的清垄器轮支撑臂1030-2、2030-2、3030-2、4030-2。安装条6080包括孔口6086,所述孔口6086可以是细长孔口,第三清垄器轮轴螺栓6061通过所述细长孔口延伸。第三轮轴螺栓6061通过第三清垄器轮6060的中心开口6064延伸。在第三清垄器轮轴螺栓6061的端部上接收衬套6065并且衬套6065被接收在具有中心开口6071的轮毂6070内。轮毂6070通过螺母6072被固定到第三清垄器轮6060,所述螺母6072被可螺纹地接收在螺纹连接器6074上,所述螺纹连接器6074通过第三清垄器轮6060中的孔口6066和通过轮毂6070中的对准孔6073延伸。在安装条6080的后侧上的螺母6075接收第三行轮清垄器轮轴螺栓6061的端部,从而将第三清垄器轮6060轴向地约束到安装条6080上,而同时衬套6065允许第三清垄器轮6060绕相应的清垄器轮轴螺栓6061自由地旋转。可以在清垄器轴螺栓6061上设置有间隔物和垫圈(未示出),以将第三清垄器轮6060远离安装条6080和第二清垄器轮1060-2、2060-2、3060-2、4060-2向外地定位。尽管在图79中未示出,但是可以在第三清垄器轮轴螺栓6061上设置刮板,以在第三清垄器轮6060旋转时从其刮去污垢或泥浆,与以上关于实施例1000、2000、3000、4000所描述的那样类似。
203.也应当理解,尽管图73至图80示出第三清垄器轮6060与第二清垄器轮1060-2、2060-2、3060-2、4060-2相邻地被安装在第二侧上,但是第三清垄器轮6060可以与第一清垄器轮1060-1、2060-1、3060-1、4060-1相邻地被安装在第一侧上。
204.清垄器分流器组件
205.图81至图85示出包括清垄器分流器组件7010的实施例的清垄器组件7000的又一个实施例。虽然图81至图85示出利用清垄器组件4000的实施例的清垄器组件7000,但是应当理解,如前所述的清垄器组件1000、1000a、2000、2000a、3000、3000a、4000a、5000的其它实施例中的任一个都可以被配置为包括清垄器分流器组件7000。因此,并非包括用于每个清垄器组件实施例的单独的多组附图,而是图81至图85包括与清垄器组件框架1100、2100、3100、4100中的每个相对应的附图标记,并且它们的相应的部件可以适于包括清垄器分流器组件7010。
206.图81是包括清垄器分流器组件7010的实施例的清垄器组件7000的右前透视图。图82和图83分别为带有图81的清垄器分流器组件的清垄器组件7000的俯视平面图和仰视平面图。图84是如图81所示的清垄器组件7000的相同视图,但是为了更好地说明清垄器分流器组件7010的实施例,去除了清垄器轮。图85是与图84相同的视图,但是示出分解的清垄器分流器组件7010。图86是图81的清垄器分流器组件的后透视图。
207.参照图84至图86,清垄器分流器组件7010包括竖向取向的分流器板7012,其被支撑在清垄器实施例1000、1000a、2000、2000a、3000、3000a、4000、4000a、5000中的任一个的清垄器框架组件1100、2100、3100c、4100c的下部子框架1100c、2100c、3100c、4100c的前端部处,使得分流器板7012被设置在清垄器轮1060-1、1060-2;2060-1、2060-2;3060-1、3060-2;4060-1、4060-2之间并且在如图所示的行进方向上从清垄器轮1060-1、1060-2;2060-1、2060-2;3060-1、3060-2;4060-1、4060-2向前延伸。已经发现,在一些条件下,清垄器轮1060-1、1060-2;2060-1、2060-2;3060-1、3060-2;4060-1、4060-2可以在两个方向上拉动作物残茬,同时在行或苗床中留下一些残茬,这会导致一些作物残茬被困在由尾部开口组件234形成的种子沟槽38中。因此,通过将向前延伸的分流器板7012定位在清垄器轮之间,分流器板7012在清垄器轮的前方提升和分散作物残茬,将作物残茬加压到一侧或两侧,所以清垄器轮可以使作物残茬更高效地从行或苗床运动,使得任何作物残茬将较不可能被困在种子沟槽38内。
208.分流器板7012的前边缘7014可以成角度以形成锋利的刀刃。在其它实施例中,前边缘7014可以具有平的、圆的或钝的边缘。在一些实施例中,分流器板7012可以具有一轮廓,使得前边缘7014a的上部分在运动方向11上是凸的并且下部分7014b在运动方向11上是凹的。
209.在一个实施例中,分流器板7012被夹在两个侧板7016-1、7016-2之间。如图85最好地所示,分流器板7012包括竖向取向的细长狭槽7018,其与侧板7016-1、7016-2中的孔口7020对准。螺纹连接器7022通过孔口7020和细长狭槽7018延伸并且由螺母7024固定。细长狭槽7018允许分流器板7012相对于侧板7016-1、7016-2可竖向调节,使得分流器板7012可以被定位成与土壤表面接触或以期望的深度穿透到土壤表面中,所述期望的深度可以小于种子深度或大于种子深度。
210.如图84和图85最好地所示,清垄器分流器组件7010可以包括适配器组件7030,其
被配置为与包括下部子框架1100c、2100c、3100c、4100c的向前延伸的清垄器轮支撑臂1030-1、1030-2;2030-1、2030-2;3030-1、3030-2;4030-1、4030-2安装在一起。如图85和图86最好地所示,适配器组件7030可以包括附接到基板7034(例如,通过焊接或其它适当的连接措施)的竖向取向的板7032。向后延伸的臂7036-1、7036-2可以附接到基板7034(例如,通过焊接或其它适当的连接措施)。向后延伸的臂7036-1、7036-2可以具有孔口7038,其被定位成与清垄器轮支撑臂1030-1、1030-2;2030-1、2030-2;3030-1、3030-2;4030-1、4030-2中的孔口1135、2135、3135、4135(或其它孔口)对准。如果孔口7038被定位与孔口1135、2135、3135、4135对准,则清垄器轴螺栓1061-1、1061-2;2061-1、2061-2;3061-1、3061-2;4061-1、4061-2可以通过对准孔口7038和1135、2135、3135、4135接收,以与其它螺栓和螺母(未示出)组合使用来将适配器组件7030固定到清垄器轮支撑臂1030-1、1030-2;2030-1、2030-2;3030-1、3030-2;4030-1、4030-2。竖向板7032可以包括竖向间隔的孔口7040(图85),所述孔口7040与侧板7016-1、7016-2中的一系列水平间隔开的上孔口7042和水平间隔开的下孔口7042中的任何一者对准。螺纹连接器7044可以通过对准孔口7040、7042延伸,并且可以由螺母7046固定,以将侧板7016-1、7016-2固定适配器组件7030的竖向板7032并且从而将分流器板7012固定到适配器组件7030的竖向板7032。应当理解,一系列孔口7042允许侧板7016-1、7016-2相对于适配器组件7030被可调节地向前和向后定位,并且从而允许清垄器轮支撑臂1030-1、1030-2;2030-1、2030-2;3030-1、3030-2;4030-1、4030-2和清垄器轮1060-1、1060-2;2060-1、2060-2;3060-1、3060-2;4060-1、4060-2改变由分流器板7012从清垄器轮1060-1、1060-2;2060-1、2060-2;3060-1、3060-2;4060-1、4060-2向前或向后凸出的距离。
211.图87是适于与清垄器组件4000的下部子框架4100c的实施例一起使用的分流器组件的可替代实施例的前透视图,如图50和图69所示。在该实施例中,下部子框架4100c包括从清垄器支撑臂4130-1、4130-2向前延伸的前凸起7050。清垄器组件1000、1000a、2000、2000a、3000、3000a、4000a和5000的其它实施例中的每个都可以用类似的前凸起7050制造。就该实施例而言,适配器组件7030可以被省略,并且侧板7016-1、7016-2可以通过螺纹连接器7044直接地安装到前凸起7050,所述螺纹连接器7044通过侧板7016-1、7016-2中的孔口7042和通过前凸起7050的孔口7052延伸并且由螺母7046固定。分流器板7012使用螺纹连接器7022附接到侧板7016-1、7016-2,所述螺纹连接器7022通过侧板7016-1、7016-2中的孔口7020延伸并且由螺母7024固定,所述孔口7020与分流器板7012中的细长狭槽7018对准,如在先前实施例中。
212.下压力监控
213.会期望的是测量由清垄器组件1000、1000a、2000、2000a、3000、3000a、4000、4000a、5000、6000、7000所经历的负载,以确定是否应当由致动器系统1300、2300、3300、4300、5300施加更大的下压力或更小的下压力。参照88至图91,在侧视图中示出在去除相应的第一清垄器轮1060-1、2060-2、3060-1、4060-1的情况下的实施例1000、1000a、2000、2000a、3000、3000a、4000、4000a中的每个。
214.一种用于测量由相应的清垄器组件所经历的负载的方法是利用设置在下部子框架1100c、2100c、3100c、4100c上的负载传感器8000。在一个实施例中,负载传感器8000可以是负载销8002,所述负载销8002替换清垄器组件1000、2000、3000、4000、5000、6000、7000的相应的实施例的导轮轴螺栓1051、2051、3051、4051。在美国专利号8,561,472中公开了合适
的负载引脚8002的示例。
215.在另一个实施例中,负载传感器8000可以是惠斯通电桥8004,其设置在相应的下部子框架1100c、2100c、3100c、4100c的清垄器支撑臂1130-1、1130-2;2130-1、2130-2;3130-1、3130-2;4130-1、4130-2中的一者或两者上。
216.在又一个实施例中,负载传感器8000可以包括负载传感器8010,其与在pct公布no.wo2019169369中描述的、由该pct中的附图标记(即,“1600”)指定的手柄组件基本相同。参照88至图93,负载传感器8010是包括套管8012的组件,所述套管8012具有在上端部处的手柄支架8014,用于将手柄8016与枢轴销8018枢转地连接。参照92至图93,依据配置,侧板8020在连杆1200-1、1200-2;2200-1、2200-2;3200-1、3200-2;4200-1、4200-2之间延伸或在中间子框架1100b、2100b、3100b、4100b的侧导轨1121-1、1121-2;2121-1、2121-2;3121-1、3121-2;4121-1、4121-2之间延伸。在一些实施例中,侧板8020可以是中间子框架1100b、2100b、3100b、4100b的基部构件1120、2120、3120、4120。侧板8020包括孔8021,套管8012通过所述孔8021延伸。在侧板8020的上方设置有接触板8022,所述接触板8022具有凸下表面8023和从中穿过的中心镗孔8024,使得凸下表面8023与侧板8020接触。在接触板8022的上方设置有负载感测构件8030,例如,“煎饼(pancake)”负载传感器(图95至图96),所述负载感测构件8030具有穿过其的孔8032。负载感测构件8030包括多个脚部8033(图96),其被定位为允许负载感测构件8030折曲和测量力。负载感测构件8030的折曲生成负载信号,其被通信到监控器50或控制模块(稍后讨论)。
217.如图94最好地所示,套管8012具有第一直径8034和较大的第二直径8035,促使在两者之间有肩部8036。第一直径8034和第二直径8035穿过负载感测构件8030中的孔8032。第一直径8034的尺寸被设定为穿过接触板8022的中心镗孔8024,但是第二直径8035和肩部8036的尺寸被设定成使得它们不能穿过接触板8022的中心镗孔8024。
218.再次参照图92和图93,斜垫圈8040和8042在手柄支架8014的下方并且在负载感测构件8030的上方被设置在套管8012上。斜垫圈8040、8042被设置成使斜垫圈8040、8042的凹表面彼此面对,允许斜垫圈8040、8042有弹性地压缩或压平,以吸收由清垄器组件1000、1000a、2000、2000a、3000、3000a、4000、4000a、5000、6000、7000所经历的冲击,从而防止负载感测构件8030过载。在斜垫圈8040、8042由于负载而被充分地压缩之前,套管8012的肩部8036将与接触板8022的上表面接触,以限制套管8012的竖向行程。垫圈8045可以被设置在侧板8020的下方。在套管8012的下端部处在镗孔8047(图94)内接收轴8046。轴支架8048被安装到轴8046的下端部。轴支架8048包括孔口8049,用于接收清垄器轮轴螺栓1061-1、1061-2;2061-1、2061-2;3061-1、3061-2;4061-1、4061-2或杆8050,其在清垄器轮轴螺栓1061-1、1061-2;2061-1、2061-2;3061-1、3061-2;4061-1、4061-2的轴线附近在清垄器轮支撑臂1130-1、1130-2;2130-1、2130-2;3130-1、3130-2;4130-1、4130-2之间延伸。
219.应当理解,尽管图88至图92示出在一个清垄器组件1000、1000a、2000、2000a、3000、3000a、4000、4000a上的各种类型的负载传感器8000、8002、8004、8010全部,这仅是为了说明目的,以举例说明负载传感器8000、8002、8004、8010的放置,这是由于每个清垄器组件1000、1000a、2000、2000a、3000、3000a、4000、4000a、5000、6000、7000将仅需要一种类型的负载测量装置。负载传感器8000、8002、8004、8010可以与监控器50进行信号通信,以维持期望的下压力。负载传感器8000、8002、8004、8010可以与监控器直接通信,或经由控制模块
与监控器通信,或者负载传感器8000、8002、8004、8010可以与致动器系统1300、2300、3300、4300、5300一起作为闭环系统或开环系统的一部分,以维持期望的下压力,例如,在国际公布no.wo2014018716中所公开的。在利用例如在美国专利号9,173,339中所公开的控制模块的布置中,控制模块可以是控制单个清垄器组件1000、1000a、2000、2000a、3000、3000a、4000、4000a、5000、6000、7000的下压力的行上模块,或者控制模块可以被配置为控制横跨种植机10的多个清垄器组件1000、1000a、2000、2000a、3000、3000a、4000、4000a、5000、6000、7000的下压力。在任何一种情况下,来自负载传感器8000、8002、8004、8010的信号被通信到控制模块并且由控制模块处理。在又一个其它实施例中,控制器可以是如在pct公布no.wo2014018717中所述的单行或多行控制模块,其中负载传感器8000、8002、8004、8010连接到具有can处理器的can网络。在这样的实施例中,can处理器可以通过can网络与来自负载传感器8000、8002、8004、8010的信号通信,并且can处理器可以通过can网络与控制信号通信,以控制一个或多个清垄器组件1000、1000a、2000、2000a、3000、3000a、4000、4000a、5000、6000、7000的下压力。
220.以下是非限制性示例。
221.示例1:一种农业清垄器(1000),其包括:适于连接到农业工具条(14)的组件支架(1010),所述组件支架(1010)包括顶板(1011)、从所述顶板(1011)向下延伸的第一侧板(1015-1)、从所述顶板(1011)向下延伸的第二侧板(1015-2)和前板(1012);第一后支架(1040-1);第二后支架(1040-2);第一侧支架(1035-1)和第二侧支架(1035-2),它们将所述组件支架(1010)连接到所述第一后支架(1040-1)和所述第二后支架(1040-2);框架(1035),其将所述组件支架(1010)连接到所述第一后支架(1040-1)和所述第二后支架(1040-2),所述框架(1035)具有第一框架端部(1031)和第二框架端部(1032)以及柱(1033),所述第一框架端部(1031)沿运动方向(1)设置在所述第二框架端部(1032)的前方,所述柱(1033)设置在所述第二框架端部(1032)上;导轮(1050),所述导轮(1050)被设置在所述第一后支架(1040-1)和所述第二后支架(1040-2)之间,在所述第一后支架(1040-1)和所述第二后支架(1040-2)之间通过所述导轮(1050)设置有轴(1051);清垄器轮框架(1080),其连接到所述第一后支架(1040-1)和所述第二后支架(1040-2)并且沿所述行进方向(1)设置在所述第一后支架(1040-1)和所述第二后支架(1040-2)的前方;至少一个清垄器轮(1061),其设置在所述清垄器轮框架(1080)上;以及致动器(1020),其在第一致动器端部(1021)处连接到所述组件支架(1010)并且在所述第二致动器端部(1022)处连接到所述柱(1033)。
222.示例2,在示例1中所述的农业清垄器(1000),其中,所述框架(1035)、所述第一侧支架(1035-1)和所述第二侧支架(1035-2)在所述组件支架(1010)与所述第一后支架(1040-1)和所述第二后支架(1040-2)之间形成四杆枢转连接。
223.示例3,在示例1或示例2中所述的农业清垄器(1000),其中,所述框架(1035)具有开口(1034)。
224.示例4,在任何先前示例中所述的农业清垄器(1000),其中,所述框架(1035)具有第一分段(1036)、第二分段(1037)、第三分段(1038)和第四分段(1039),所述第一分段(1036)相对于所述第二分段(1037)成角度,所述第二分段(1037)相对于所述第三分段(1038)成角度,并且所述第三分段(1038)相对于所述第四段(1039)成角度。
225.示例5,在任何先前示例中所述的农业清垄器,其中,所述清垄器轮框架(1080)具有第一臂(1081-1)、第二臂(1081-2)和将所述第一臂(1081-1)和所述第二臂(1081-2)连接的连接器(1082)。
226.示例6,在示例5中所述的农业清垄器(1000),其中,所述第一臂(1081-1)、所述第二臂(1081-2)和所述连接器(1082)是整体式部件。
227.示例7,在示例5或示例6中所述的农业清垄器(1000),其中,所述第一臂(1081-1)具有第一狭槽(1083-1),所述第二臂(1081-2)具有第二狭槽(1083-2),并且所述第一狭槽(1083-1)和所述第二狭槽(1083-2)允许所述清垄器轮框架(1080)枢转以调节所述至少一个清垄器轮(1061)的穿透深度。
228.示例8,在任何先前示例中所述的农业清垄器(1000),其中,在所述清垄器轮框架(1080)上设置有两个清垄器轮(1061-1、1061-2)。
229.示例9,在示例8中所述的农业清垄器(1000),其中,所述两个清垄器轮(1060-1、1060-2)具有尖齿(1061-1、1061-2),并且所述两个清垄器轮(1061-1、1061-2)被设置在所述清垄器轮框架(1080)上,使得每个清垄器轮(1061)的所述尖齿(1061-1、1061-2)与彼此的所述尖齿(1061-2、1061-1)交错。
230.示例10,在任何先前示例中所述的农业清垄器(1000),其中,所述第一致动器端部(1021)被连接到所述前板(1012)。
231.示例11,在示例10中所述的农业清垄器,其中,所述第一致动器端部通过第一臂和第二臂连接到所述前板。
232.示例12,在任何先前示例中所述的农业清垄器,其中,所述顶板、所述第一侧板、所述第二侧板和所述前板是整体式部件。
233.示例13,在任何先前示例中所述的农业清垄器(1000)还包括支架(1001),以将所述组件支架(1010)附接到所述农业工具条(14)。
234.示例14,在任何先前示例中所述的农业清垄器(1000)还包括刮板(1045),所述刮板在所述第一后支架(1040-1)和所述第二后支架(1040-2)之间被设置在所述导轮(1050)上。
235.示例15,在任何先前示例中所述的农业清垄器(1000),其中,所述轴(1051)包括负载销(1070)。
236.示例16,在任何先前示例中所述的农业清垄器(1000)还包括设置在所述清垄器轮框架(1080)上的负载传感器(1075)。
237.示例101,一种农业清垄器2000,其包括:适于连接到农业工具条14的组件支架2010,所述组件支架2010包括顶板2011、从所述顶板2011向下延伸的第一侧板2015-1、从所述顶板2011向下延伸的第二侧板2015-2、将所述第一侧板2015-1和所述第二侧板2015-2连接的连接器板2012以及将所述第一侧板2015-1和所述第二侧板2015-2连接的基板2013;第一后支架2040-1;第二后支架2040-2;第一侧支架2035-1和第二侧支架2035-2,它们将所述组件支架2010连接到所述第一后支架2040-1和所述第二后支架2040-2;框架2030,所述框架2030将所述组件支架2010连接到所述第一后支架2040-1和所述第二后支架2040-2,所述框架2030具有第一框架端部2031和第二框架端部2032、第一侧2036-1、第二侧2036-2、框架板2034和轴2014,所述第一框架端部2031沿行进方向1设置在所述第二框架端部2032的前
方,所述框架板2034连接所述第一侧2036-1和所述第二侧2036-2,所述轴2014连接所述第一侧2036-1和所述第二侧2036-2;导轮2050,其设置在所述第一后支架2040-1和所述第二后支架2040-2之间,在所述第一后支架2040-1和所述第二后支架2040-2之间通过所述导轮2050设置有轴2051;清垄器轮框架2080,其连接到所述第一后支架2040-1和所述第二后支架2040-2并且沿所述行进方向1设置在所述第一后支架2040-1和所述第二后支架2040-2的前方;至少一个清垄器轮2060,其设置在所述清垄器轮框架2080上;第一致动器2020,其在第一致动器端部2021处连接到所述连接器板2012并且在第二致动器端部2022处连接到所述框架板2034;第二致动器2025,其被设置在所述基板2013的上方并且可操作地连接到所述轴2014。
238.示例102,在示例1中所述的农业清垄器2000,其中,所述框架2030、所述第一侧支架2035-1和所述第二侧支架2035-2在所述组件支架2010与所述第一后支架2040-1和所述第二后支架2040-2之间形成四杆枢转连接。
239.示例103,在示例101至示例102中任一项所述的农业清垄器2000,其中,所述第一致动器2020是单作用致动器。
240.示例104,在示例101至示例102中任一项所述的农业清垄器2000,其中,所述第一致动器2020是双作用致动器。
241.示例105,在示例101至示例103中任一项所述的农业清垄器2000,其中,所述第一致动器2020是气囊、气动致动器、液压致动器、弹簧或机电致动器之一。
242.示例106,在示例101至示例103中任一项所述的农业清垄器2000,其中,所述第一致动器2020是气囊,并且所述第二致动器2025是至少一个弹簧。
243.示例107,在示例101至示例103中任一项所述的农业清垄器,其中,所述第一致动器2020是气囊,并且所述第二致动器2025是气囊。
244.示例108,在示例101至示例107中任一项所述的农业清垄器2000,其中,所述第二致动器2025是单作用致动器。
245.示例109,在示例101至示例105中任一项所述的农业清垄器2000,其中,所述第二致动器2025是双作用致动器。
246.示例110,在示例101至示例105或示例108中所述的农业清垄器2000,其中,所述第二致动器2025是气囊、气动致动器、液压致动器、弹簧或机电致动器之一。
247.示例111,在示例101至示例106中任一项所述的农业清垄器2000,其中,所述第二致动器2025包括多个弹簧。
248.示例112,在示例101至示例111中任一项所述的农业清垄器2000,其中,所述第二致动器2025向所述农业清垄器2000提供上升力,以将所述农业清垄器2000提升而使其不与地面接触。
249.示例113,在示例101至示例112中任一项所述的农业清垄器2000,还包括被设置在所述第二致动器2025上方的上板2027,所述上板被连接到所述轴2014,并且所述上板被可枢转地与所述第一侧板2015-1和所述第二侧板2015-2接合。
250.示例114,在示例101至示例113中任一项所述的农业清垄器2000,其中,所述清垄器轮框架2080具有第一臂2081-1、第二臂2081-2和将所述第一臂2081-1和所述第二臂2082-2连接的连接器2082。
251.示例115,在示例114中所述的农业清垄器2000,其中,所述第一臂2081-1、所述第二臂2081-2和所述连接器2082是整体式部件。
252.示例116,在示例114中所述的农业清垄器2000,其中,所述第一臂2081-1具有第一狭槽(2084-1、2086-1、2087-1),所述第二臂2081-2具有第二狭槽(2084-2、2086-2、2087-2),所述第一狭槽和所述第二狭槽允许所述清垄器轮框架2080枢转以调节所述至少一个清垄器轮2060的穿透深度。
253.示例117,在示例101至示例116中任一项所述的农业清垄器2000,其中,在所述清垄器轮框架2080上设置有两个清垄器轮2060。
254.示例118,在示例117中所述的农业清垄器2000,其中,所述两个清垄器轮2060具有尖齿2061,并且所述两个清垄器轮2060被设置在所述清垄器轮框架2080上,使得每个清垄器轮2060的所述尖齿2061与彼此的所述尖齿2061交错。
255.示例119,在示例101至示例118中任一项所述的农业清垄器2000,其中,所述顶板2011、所述第一侧板2015-1、所述第二侧板2015-2、所述连接板2012和所述基板2013是整体式部件。
256.示例120,在示例101到例119中任一项所述的农业清垄器2000,还包括支架2001,以将所述组件支架2010附接到所述工具条。
257.示例121,在示例101至示例120中任一项所述的农业清垄器2000,还包括刮板2045,所述刮板2045在所述第一后支架和所述第二后支架之间被设置在所述导轮上。
258.示例122,在示例101至示例122中任一项所述的农业清垄器2000,其中,所述轴2051包括负载销2070。
259.示例123,在示例1中所述的农业清垄器2000,还包括负载传感器2075,所述负载传感器2075被设置在所述清垄器轮框架2080上。
260.示例301,一种农业清垄器,其包括:用于连接到农业工具条或农业垄单元的框架;设置在所述框架上的导轮;连接到所述框架的清垄器轮框架;以及设置在所述清垄器轮框架上的至少一个清垄器轮。
261.示例302,在示例300中所述的农业清垄器,其中,在所述清垄器轮框架上设置有两个清垄器轮。
262.示例303,在示例302中所述的农业清垄器,其中,所述导轮被设置在所述两个清垄器轮之间的空间中。
263.示例304,在示例300至示例302中任一项所述的农业清垄器,其中,所述导轮在所述清垄器的行进方向上设置在所述至少一个清垄器轮的后方。
264.示例305,在示例300至示例303中任一项所述的农业清垄器,其中,所述清垄器轮框架是可相对于所述框架枢转的,以调节所述至少一个清垄器轮在土壤中的穿透深度。
265.示例306,在示例300至示例304中任一项所述的农业清垄器,还包括设置在所述框架上的第一致动器,用于调节由所述至少一个清垄器轮施加到土壤的力。
266.示例307,在示例306中所述的农业清垄器,还包括第二致动器,以施加与由所述第一致动器所施加的力相反的力。
267.示例308,一种农业种植机,其包括:工具条;连接到所述工具条的至少一个垄单元,所述垄单元包括打开系统和关闭系统;以及示例301至示例307中任一项所述的清垄器,
其沿行进方向在所述垄单元的前方附接到所述工具条或所述垄单元。
268.示例401,一种农业清垄器(4000),其包括:适于连接到农业工具条(14)的附接支架(4010),其具有第一侧和第二侧;第一后支架(4040-1);第二后支架(4040-2);第一臂(4035-1)和第二臂(4036-1),它们可枢转地连接到所述附接支架(4010)的所述第一侧和可枢转地连接到所述第一后支架(4040-1);第三臂(4035-2)和第四臂(4036-2),它们可枢转地连接到所述附接支架(4010)的所述第二侧和可枢转地连接到所述第二后支架(4040-2);第一框架(4030),其由所述第二臂(4036-1)和所述第四臂(4036-2)形成;导轮框架(4042),其连接所述第一后支架(4040-1)和所述第二后支架(4040-2);设置在所述框架(4042)内的导轮(4050);以及至少一个清垄器轮(4060),其可枢转地连接到所述第一后支架(4040-1)和所述第二后支架(4040-2)中的至少一者。
269.示例402,在示例401中所述的农业清垄器(4000),其中,第一清垄器轮(4060-1)被可枢转地连接到所述第一后支架(4040-1),并且第二清垄器轮(4060-2)被可枢转地连接到所述第二后支架(4040-2)。
270.示例403,在示例402中所述的农业清垄器(4000),其中,所述导轮(4050)被设置在所述两个清垄器轮(4060-1、4060-2)之间的空间中。
271.示例404,在示例401至示例403中任一项所述的农业清垄器(4000),其中,所述导轮(4050)在所述清垄器(4000)的行进方向(1)上设置在所述至少一个清垄器轮(4060)的后方。
272.示例405,在示例401至示例404中任一项所述的农业清垄器(4000),其中,所述导轮框架(4042)是可相对于所述第一后支架(4040-1)和所述第二后支架(4040-2)枢转的,以调节所述至少一个清垄器轮(4060)在土壤中的穿透深度。
273.示例406,在所述示例401至示例405中任一项所述的农业清垄器(4000),还包括设置在所述第一框架(4030)上的第一致动器(4020),用于调节由所述至少一个清垄器轮(4060)施加到土壤的力。
274.示例407,在示例406中所述的农业清垄器(4000),还包括设置在所述第一框架(4030)上的第二致动器(4025),以施加与由所述第一致动器(4020)所施加的力相反的力。
275.示例408,一种农业种植机,其包括:工具条(14);连接到所述工具条(14)的至少一个垄单元(200),所述垄单元(200)包括打开系统(234)和关闭系统(236);以及附接到所述工具条(14)的、示例401至示例407中任一项所述的清垄器(4000)。
276.以上的描述和附图旨在是说明性的而非限制性的。对于本领域的技术人员而言将显而易见的是针对模块化计量系统和计量模块的实施例和一般原理和特征的各种修改以及本文描述的过程。因此,本公开应当被给予与所附权利要求书一致的最广泛的范围以及有权享有这样的权利要求书的等同物的全部范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1