成组点播的种植控制的制作方法
1.本说明书涉及农业机器。更具体地,本说明书涉及使用农业机器控制成组点播。
背景技术:
2.存在各种各样不同类型的农业机器来将材料施加到农田。一些这样的农业机器包括喷雾器、带有侧修整杆的耕作机、气力播种机以及具有行单元的种植机等。
3.作为一个示例,行单元常常被安装到具有多个行单元的种植机(如本文所用,术语种植和种植机包括播种和播种机)。种植机常常由拖拉机牵引到土壤之上,在那里使用行单元将种子种植到土壤中。种植机上的行单元使用对行单元施加下压力以将圆盘开沟器推入地面中的下压力组件和设定圆盘开沟器的穿透深度的规轮的组合来跟随地面轮廓。
4.有时操作种植机以使得在给定位置处以种子簇中的1-4粒种子来播种作物。在执行这样的种植操作时,可能可取的是将种子尽可能彼此靠近地种植在各个土丘内。
5.上面的讨论仅提供用于一般背景信息,而非旨在用于帮助确定要求保护的主题的范围。
技术实现要素:
6.行单元具有排种器和种子输送系统。获得目标种子群,并且驱动排种器和种子输送系统中的至少一个的马达间歇地脉动以基于机器速度和目标种子群来分组种植种子。
7.提供本发明内容以按简化形式介绍概念的选择,其在下面的具体实施方式中进一步描述。本发明内容并非旨在标识要求保护的主题的关键特征或必要特征,也非旨在用于帮助确定要求保护的主题的范围。要求保护的主题不限于解决背景技术中指出的任何或所有缺点的实现方式。
附图说明
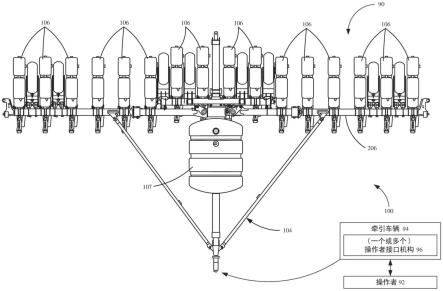
8.图1是以局部图示和局部示意图形式示出的播种或种植机的一个示例的俯视图。
9.图2是示出图1所示的种植机的行单元的一个示例的侧视图。
10.图3是示出图1所示的种植机的行单元的另一示例的侧视图。
11.图4是排种系统的一部分的一个示例的透视图。
12.图5是排种系统的一部分的另一示例的透视图。
13.图6示出可与排种系统一起使用的主动种子输送系统的示例。
14.图7示出可与排种系统一起使用的主动输送系统的另一示例。
15.图8是示出马达控制系统架构的一个示例的框图。
16.图9是示出图8所示的马达控制系统架构的操作的一个示例的流程图。
17.图10示出成组种子的一个示例。
具体实施方式
18.如上面讨论的,在一些场景中,可能可取的是分组种植种子。这些组可基于期望的目标种子群而隔开。一些场景包括强降雨事件。例如,强降雨降低了土壤含氧量,增加苗期病害病原菌的压力,并且可导致土壤板结。因此当在作物出苗之前下雨时,土壤板结常常是问题。在诸如棉花和其它作物的一些作物中,生产者使用穴播种植模式,以使得多个种子以相对紧密的分组来种植。这使得多个种子能够在发芽和植物出苗期间一起将土壤向上推。
19.然而,难以彼此相对靠近(例如,在彼此1-2cm内)地种植多个种子,特别是在种子被单粒化以控制种子群的场景中。如下面更详细描述的,一些这样的场景使用包括可旋转盘的排种器或者具有单排孔洞或种子孔的其它排种部件(例如,碗)。各个种子孔用于保持种子的单粒化。使用盘或碗或具有单排孔的其它相关装置在彼此期望的接近度内种植成组种子会非常困难。
20.因此,本说明书涉及一种马达控制系统,其用于脉动(或加速)排种器(和/或在使用主动种子输送系统的情况下,驱动主动种子输送系统的马达)的rpm速度以便在期望的接近度内将种子分组在一起。控制系统基于目标种子群减慢马达的rpm速度以便在种子组之间创建空间。在另一示例中,排种器配置有种子孔簇(或分组),其中分组彼此分离开比组内的孔之间的间距大的组分离距离间距。这有助于在种子组之间创建间隙,因此减小为了获得期望的种子组所需要增大和减小马达速度的量。
21.下面描述的一些系统包括主动输送系统。驱动这种系统的马达可减速以创建种子组,然后加速以在种子组之间创建空间。如果使用排种器马达和输送系统马达二者,则可采用这些技术的组合。
22.图1是架构90的一个示例的局部图示、局部示意性俯视图,其包括农业种植机100以及由操作者92操作的牵引车辆94。操作者92可示例性地与操作者接口机构96交互以操纵和控制车辆94以及机器100的一些或所有部分。
23.机器100是行间作物种植机,其示例性地包括作为框架104的一部分的工具栏102。图1还示出被安装到工具栏102上的多个种植行单元106。机器100可被牵引在牵引车94(例如,拖拉机)后面。图1示出材料可被储存在罐107中并通过供应管线泵送,因此可通过行单元106将材料分配在正在种植的行中或附近。
24.图2是行单元106的一个示例的侧视图。行单元106示例性地包括化学品罐(本文中也称为货物罐)110和种子储存罐112。其还示例性地包括一个或更多个圆盘开沟器114、一组规轮116和一组封闭轮118。来自罐112的种子被供应到排种器124中。排种器124(下面更详细地示出)控制种子从种子储存罐112掉落到输种管120或其它种子输送系统(例如,刷带或飞轮皮带(分别示出于图6至图7中))中的速率。种子可由种子传感器122感测。
25.现在将更详细地讨论行单元106的一些部分。首先,将注意,存在不同类型的排种器124,所示排种器124仅是为了示例而示出并且在下面更详细地描述。然而,在一个示例中,每个行单元106不需要具有自己的排种器。相反,可在中心位置针对成组的行单元106执行排种或其它单粒化或种子划分技术。排种系统可包括指状拾取排种器和/或真空排种器(例如,具有可旋转盘、可旋转凹物或碗形装置)等。种子输送系统可以是重力下落系统(例如,图2所示的输种管120),其中种子通过输种管120掉落并通过输种管(经由重力)从出口端121下落到种子沟槽162中。其它类型的种子输送系统可包括辅助系统,因为它们不仅仅
依靠重力来使种子从排种系统移动到地面中。相反,这些辅助系统主动地辅助种子从排种器移动到下面的开口,在那里种子离开或沉积到地面或沟槽中。这些可以是物理地捕获种子并使种子从排种器移动到种子输送系统的出口端的系统,或者它们可以是通过输种管泵送空气以辅助种子的移动的气动系统。可控制空气速度以控制种子通过输送系统移动的速度。下面关于图6和图7更详细地描述辅助系统的一些示例。
26.下压力致动器126被安装在将行单元106联接到工具栏102的联接组件128上。致动器126可以是液压致动器、气动致动器、基于弹簧的机械致动器或各种各样其它致动器。在图2所示的示例中,杆130联接到平行连杆132并用于对行单元106施加附加下压力(在箭头134所指示的方向上)。总下压力(包括致动器126所施加的由箭头134指示的力加上由于作用在行单元106上的重力而引起并由箭头136指示的力)被作用在封闭轮118(从地面138并由箭头140指示)和圆盘开沟器114(同样从地面138并由箭头142指示)上的指向上的力抵消。剩余力(箭头134和136所指示的力向量之和减去箭头140和142所指示的力)和行单元上的任何其它地面接合部件(未示出)上的力是由箭头146指示的差力。该差力在本文中也可被称为下压力裕度。由箭头146指示的力作用在规轮116上。该负载可由规轮负载传感器感测,规轮负载传感器可位于行单元106上可感测该负载的任何地方。规轮负载传感器也可被放置在不可直接感测负载而是指示该负载的特性的地方。例如,其可被设置在一组规轮控制臂(或规轮臂)148附近,臂148将规轮116可移动地安装到柄部152并控制规轮116与双圆盘开沟器114中的圆盘之间的偏移,以控制种植深度。
27.臂(或规轮臂)148示例性地抵靠机械止动件(或臂接触构件或楔)150。机械止动件150相对于柄部152的位置可由种植深度致动器组件154设定。控制臂148示例性地围绕枢轴点156枢转,以使得随着种植深度致动器组件154致动以改变机械止动件150的位置,规轮116相对于双圆盘开沟器114的相对位置改变,以改变种植种子的深度。
28.在操作中,行单元106大致在箭头160所指示的方向上行进。双圆盘开沟器114在土壤138中开犁沟162,并且犁沟162的深度由种植深度致动器组件154设定,种植深度致动器组件154本身控制规轮116的最下部与圆盘开沟器114之间的偏移。种子通过输种管120掉落到犁沟162中并且封闭轮118封闭犁沟162(例如,将土壤推回到犁沟162中)。
29.随着种子通过输种管120掉落,它们可被种子传感器122感测。下面更详细地描述种子传感器122的一些示例。简言之,种子传感器122的一些示例可包括光学或反射传感器,其包括辐射发送器部件和接收器部件。发送器部件发射电磁辐射,然后接收器部件检测辐射并生成指示与传感器相邻存在种子或没有种子的信号。在另一示例中,行单元106可设置有种子固定器,其被定位成在种子被放置在犁沟162中之后穿过犁沟162行进,以将种子固定就位。种子传感器可被放置在种子固定器上并生成指示种子的传感器信号。同样,下面更详细地描述种子传感器的一些示例。
30.在图2所示的示例中,在使用输种管120的情况下,排种器124的旋转可被脉动以使得其被增大以使种子的组或簇快速地掉落到输种管120中,以使得它们将彼此靠近地离开输种管120的出口端121。然后,排种器124的旋转可减慢,以使得下一种子簇或组与刚刚掉落的前一种子簇或组隔开。这在下面更详细地描述。
31.图3示出行单元106的另一示例。一些项与图2所示的那些相似,它们被相似地编号。图3示出行单元106还可包括行清洁器161,其可从开沟器114将犁沟打开的表面部分处
去除碎屑、团块、残留物等。另外,图3示出可从种子源(可以是种子罐112、罐107(示出于图1))或从另一种子源将种子提供给排种器124。
32.另外,代替如图2所示是输种管120(其依靠重力来使种子移动到犁沟162)的种子输送系统,图3所示的种子输送系统是辅助种子输送系统166。辅助种子输送系统166中还示例性地设置有种子传感器122。下面关于图6和图7更详细地描述辅助种子输送系统166的示例。简言之,辅助种子输送系统166包括接续构件,其在种子离开排种器124时捕获种子并使其在箭头168所指示的方向上朝着犁沟162移动。系统166具有出口端170,种子从出口端170离开辅助系统166进入犁沟162中,在出口端170种子再次到达其最终静止位置。图3示出驱动排种器124的旋转的排种器马达172和驱动辅助输送系统166的旋转的输送系统马达174。在一个示例中,马达172和174可单独地被控制。在另一示例中,它们彼此协调控制。在另一示例中,排种器124和辅助种子输送系统166二者由单个马达驱动。在一个示例中,如别处更详细地描述的,真空源123将排种器124中抽真空,以帮助排种。
33.在一个示例中,种子在重力作用下仅仅从出口端170掉落到犁沟162中。然而,在另一示例中,种子可从输送系统166以比在重力作用下将达到的速度更大或更小的速度排出。类似地,种子可从出口端170直直地向下掉落到犁沟162中。然而,在另一示例中,种子可能从出口端170被略微向后推动以适应行单元106的向前运动,以使得种子的行进路径更垂直,因此种子在到达犁沟后滚动更少。此外,种子可被向后排出并被拖尾构件(例如压轮)困在地面上,拖尾构件用于在排出种子之后停止种子的任何向后移动,并迫使种子与地面牢固接合。
34.在一个示例中,驱动排种器124的马达172可脉动以将彼此紧密相邻的种子放置到辅助输送系统166中。然后,辅助输送系统166使种子簇(紧密间隔的种子)移动到出口端170,在那里使它们以彼此紧密间隔的关系沉积在犁沟162中。例如,马达172可使排种器124的旋转脉动,以使得三个种子在种子输送系统166中彼此紧密间隔,因此将彼此靠近地沉积在犁沟中。在脉冲之间,马达172可减慢或停止排种器124的旋转,以使得种子簇(或种子组)彼此间隔开。这样,行单元106以组内种子间距种植相对于彼此紧密间隔开的种子簇或组,其中这些簇或组与其它种子组或簇间隔开组间距(或组分离距离),其中组内种子间距小于组间距(或组分离距离)。在此示例中,马达174可驱动辅助输送系统166的旋转,以使得它处于相对恒定的速度。因此,排种器124的脉动旋转形成由种子输送系统166以间隔开的簇或组沉积在犁沟中的种子簇或组。
35.在另一示例中,马达172可以恒定速度驱动排种器124旋转,并且马达174脉动辅助输送166的旋转,以使得辅助输送系统166的脉动操作用于使种子相对于彼此紧密成组或成簇。在这样的场景中,马达174可增大系统166的旋转速度,以使得例如三个种子彼此紧密靠近地沉积在犁沟中,然后减慢辅助输送系统166的旋转,以使得下一簇沉积在与前一簇可取间隔开的位置。
36.在另一示例中,马达172和174可彼此协调动作,以使得种子以间隔开的簇或组的形式沉积在犁沟中。
37.图4示出可用作排种系统(或排种器)124的一部分的可旋转机构的一个示例。可旋转机构包括可旋转盘或凹形元件180。可旋转元件180具有盖(未示出)并且相对于行单元106的框架可旋转地安装。可旋转元件180具有紧密靠近对应的孔184的多个突起或凸块
182。种子池186由从种子源112、107接收到排种器124中的种子形成。种子池186大致设置在由旋转机构180及其对应的盖形成的外壳的下部。可旋转元件180由其马达172(例如电动马达、气动马达、液压马达等)可旋转地驱动以便大致在箭头188所指示的方向上围绕轮毂旋转。向排种机构的内部引入压力差,以使得压力差影响种子从种子池186被抽吸到孔184。例如,可由真空源123施加真空以从种子池186抽吸种子,以使得它们最终静止于孔184中,在那里真空将它们保持就位。另选地,可将正压力引入到排种机构的内部以横跨孔184创建压力差以执行相同的功能。
38.一旦种子最终静止于孔184中(或附近),真空或正压力差就用于将种子保持在孔184内,使得大致在箭头188所指示的方向上将种子从种子池186运送到种子排放区域190。可能会发生多个种子驻留在单独的种子单元中的情况。在这种情况下,与旋转的种子单元紧密相邻的一组刷子或其它构件194往往会去除多个种子,以使得每个单独的单元仅运送单个种子。另外,种子传感器193也可示例性地与旋转元件180相邻安装。其生成指示种子存在的信号。
39.一旦种子到达种子排放区域190,就示例性地去除真空或其它压力差,并且正种子去除轮或敲除轮191可用于从种子单元去除种子。轮191示例性地具有一组突起195,其至少部分地突出到孔184中以主动地将种子从那些孔移出。当种子(例如种子171)被移出时,其示例性地通过输种管120或种子输送系统166(其一些示例示出于图3、图6和图7中)移动到地面中的犁沟162。
40.将注意的是,驱动排种器124的旋转的马达或排种器124本身可相对于传感器布置,该传感器生成指示马达或排种器124的角位置或可从其推导出排种器124的角位置的另一项的传感器信号。角位置连同来自种子传感器193的信号和排种器124的旋转速度一起可用于在种子穿过种植机移动并进入地下时确定种子的位置。这可用于控制来自罐112和/或罐107的种子的分配。传感器可以是角度编码器、霍尔效应传感器、光学传感器或者生成指示角位置的信号的各种各样其它传感器中的任一种。
41.图5示出可旋转机构的另一示例,其包括与图4所示的可旋转元件180类似并且与盖(未示出)一起操作的可旋转盘或碗196。类似可旋转元件180,可旋转元件196具有多个凸块198,其中凸块紧密靠近孔200。因此,可旋转元件196具有成簇的孔200。各个孔簇内的孔200彼此紧密间隔开。然而,这些簇围绕可旋转元件(或盘)196的周边与其它簇间隔开角度α。因此,随着圆盘196旋转,压力差被引入到排种机构的内部,从而压力差影响种子从种子池被抽吸到孔200中。然后,种子旋转到一个位置(类似于图4中的190),在那里它们从孔200被去除(例如通过敲除轮191)。这样,由可旋转机构196输送到种子输送系统(无论它是输种管120还是辅助输送系统166)中的种子已经成簇。然而,即使如图5所示的可旋转机构196上具有成簇孔200,驱动排种器124和/或辅助输送系统166的马达仍可脉动以将种子更靠近彼此放置,或者增大成簇或成组种子之间的距离等。
42.图6示出排种系统和种子输送系统的示例,其中旋转元件180或196被定位成使得其种子排放区域190在种子输送系统166上方并紧密靠近。在图6所示的示例中,种子输送系统166包括运输机构,其可以是诸如皮带200的接续机构,其具有由附接到充当种子的接收器的皮带199的远侧延伸的刷毛202形成的刷子。皮带199绕着皮带轮204和206安装。皮带轮204和206中的一个示例性地是驱动皮带轮,而另一个示例性地是惰轮。驱动皮带轮示例性
地由传送马达174(可以是电动马达、气动马达、液压马达等)可旋转地驱动。皮带199大致在箭头168所指示的方向上被驱动。
43.因此,当种子通过旋转元件180、196移动到种子排放区域190,在那里它们从旋转元件180、196中的种子单元排放时,它们示例性地通过将种子推到刷毛202中的突起182被定位在刷毛202内。种子输送系统166示例性地包括围绕刷毛202形成外壳的壁,以使得随着刷毛202在箭头168所指示的方向上移动,种子连同它们一起被从排种机构的种子排放区域190运送到排放区域170,排放区域170可位于通过行单元106上的犁沟开沟器114生成的沟槽或犁沟162内的地平面之上、地平面处或地平面之下。
44.另外,种子传感器122也示例性地联接到种子输送系统166。随着种子在刷毛202内移动,传感器122可检测是否存在种子。还应该注意的是,尽管本说明书将继续为具有多个传感器122和/或193,但明确可以想到,在另一示例中,仅使用一个传感器。或者也可使用附加传感器。类似地,图6所示的种子传感器122可设置在不同的位置处(例如122a所示)。使种子传感器更靠近从系统排出种子的地方可减小识别最终种子位置的误差。同样,可存在多个种子传感器,不同类型的种子传感器,并且它们可位于许多不同的位置。
45.另外,在一个示例中,驱动皮带199的马达174或皮带199本身可相对于传感器配置,该传感器生成指示马达或皮带199的角位置的信号。这可连同种子传感器信号和皮带199的旋转速度一起用于确定所感测的种子或种子组将何时到达犁沟。
46.图7与图6类似,不同之处在于种子输送系统166不包括具有远侧延伸刷毛的皮带。相反,它包括飞轮皮带(运输机构),其中一组桨叶214形成单独的腔室(或接收器),种子从排种机构的种子排放区域190掉落到这些腔室中。飞轮皮带使种子从种子排放区域190移动到在沟槽或犁沟162内的飞轮皮带的出口端170。
47.也存在各种各样其它类型的输送系统,包括运输机构和接收种子的接收器。例如,它们包括相对的皮带接收、保持并使种子移动到犁沟的双皮带输送系统、具有捕获来自排种系统的种子并将其移动到犁沟的指状物或其它对象的可旋转轮、操作以将种子运输到犁沟的多个运输轮以及螺旋输送器等。本说明书将继续针对环形构件(例如刷带、飞轮皮带)和/或输种管进行,但本文中也可以想到许多其它输送系统。
48.图8是马达控制架构220的一个示例的框图。架构220示例性地包括马达控制系统222,其生成用于控制排种器马达172和/或种子输送系统马达174的控制信号。在图8所示的架构中,马达172和174驱动排种系统124和种子输送系统166。如上面讨论的,排种系统124从种子源107、112接收种子,对那些种子进行单粒化或排种,并且将单粒化或排种的种子提供给种子输送系统166。图8的描述继续针对种子输送系统166是辅助输送系统进行,但其也可以是输种管120,在是输种管120的这种情况下不需要提供种子输送系统马达174。
49.在本文所讨论的示例中,马达控制系统222生成马达控制信号以控制马达172和/或174,以使得种子通过种子输送系统166作为成组或成簇的种子被输送至犁沟。例如,种子可按照两个、三个、四个或更多种子的组或簇来被输送。那些组或簇示例性地彼此分离开组分离距离。图9示出其一个示例。
50.在图9所示的示例中,犁沟162以多个不同的种子组或簇(标识为组或簇224、226、228和230)来种植。在图9所示的示例中,各个组或簇具有三个种子。簇分离开由箭头232所指定的组分离距离。可基于各种各样不同的标准(例如,作物类型、杂交、土壤条件以及各种
各样其它标准)来选择或控制分离簇的分离距离。在本文所讨论的示例中,马达控制系统222生成用于控制排种器马达172和/或种子输送系统马达174的马达控制信号,以使得在各个簇224-230中期望数量的种子相对于彼此紧密间隔(例如彼此在两厘米内等)(簇内种子间距)。马达还被控制以使得簇彼此分离开期望的组分离距离232。
51.因此,马达控制系统220可从一个或更多个种子传感器122、193、位置传感器234、速度传感器236和/或各种各样其他项238接收输入。位置传感器234可以是gps接收器或识别现场的行单元106的地理位置的另一位置传感器。因此,如果种子簇224-230要被放置在预定的位置,则马达控制系统222可控制马达172和/或174将簇中的种子沉积在期望的预定位置。在另一示例中,可能不存在预定位置,而是种子实际沉积的位置将由马达控制系统222捕获并发送至另一系统以用于测绘。在这种情况下,由位置传感器234识别的不同簇224-230沉积的位置可被保存并转发给测绘系统或另一合适的系统。
52.速度传感器236可提供指示各种不同的速度的一个或更多个速度信号。在一个示例中,速度传感器236可感测马达172和/或马达174的旋转速度。其可通过感测马达的驱动轴的输出速度、通过感测可旋转元件(例如可旋转元件180、196或者辅助种子输送系统166中的连续皮带等)的速度来完成。速度传感器236还可包括感测指示行单元106的地面速度的速度的传感器。这些速度信号可用于控制马达172和/或174将种子或组放置在期望的位置,或者测绘放置种子或组的位置。类似地,可基于未来命令操作的知识来执行预测计算。预测计算可用于控制马达172和/或174将种子或组放置在期望的位置或者测绘放置种子或组的位置。
53.在图8所示的示例中,马达控制系统222示例性地包括一个或更多个处理器240、数据仓库242、马达控制信号生成系统244、通信系统246,并且其可包括各种各样的其它项248。通信系统246示例性地允许架构220中的各种项之间的通信,并且其可允许与外部系统(例如远程系统)的通信。因此,通信系统246可被配置为经由控制器局域网(can)总线通信,其中实现了can总线。其可被配置为经由局域网、广域网、近场通信网络、蜂窝通信网络或者各种各样其它网络中的任一种或网络的组合来通信,其中将要使用这种通信。
54.马达控制信号生成系统244可获得诸如目标种子间距或种子群(例如,种子率)、每种子簇或种子组的期望种子数量以及其它标准的信息。该信息可基于操作者输入通过通信系统246接收。系统244可从数据仓库242或远程数据仓库获得或接收数据,或者可以以其它方式接收。
55.马达控制信号生成系统244还示例性地从传感器122、193、234、236和/或238中的一个或更多个接收输入。基于这些信号,马达控制信号生成系统244可生成排种器马达控制信号250和/或种子输送系统马达控制信号252。可生成信号250和252以使马达172和/或174的操作脉动,从而种子通过排种系统124和/或种子输送系统166成簇或成组地排出。系统244可生成控制信号250和252以彼此独立地或彼此相关地控制马达172和/或174。例如,当系统使排种器马达172的速度脉动时,其也可使种子输送系统马达174的速度脉动。另选地,其可使马达172的速度脉动,同时保持马达174的速度相对恒定。这些和其它控制机构可用于控制马达172和174的速度,以使得以期望的组分离距离232分离开的种子组或簇224-230种植种子。
56.图10是示出在以种子组或种子簇种植种子时图8所示的架构220的操作的一个示
例的流程图。首先假设行单元206配置有排种器126和种子输送系统120、166。这由图10的流程图中的方框260指示。在一个示例中,种子输送系统是输种管120。在另一示例中,它是主动种子输送系统166。排种器可以是围绕其外周具有等距孔的排种器(例如图4所示),如图10的流程图中的方框262所指示。其也可以是具有成组孔的排种器(例如图5所示),如图5的流程图中的方框264所指示。当种子输送系统是主动种子输送系统或辅助种子输送系统166时,则排种器124和主动输送系统166可具有可独立控制的马达,如方框266所指示。马达可彼此相关地控制,如方框268所指示。类似地,行单元也可以以其它方式配置,这由图10的流程图中的方框270所指示。
57.在某一点,马达控制信号生成系统244获得目标种子群。这由图10的流程图中的方框272所指示。目标种子群可标识种子簇或种子组之间的期望间距,和/或它可以是每英亩的原始种子群等。目标种子群可通过操作者输入274接收或从数据仓库(本地数据仓库242或远程数据仓库)接收,如方框276所指示。目标种子群也可定义其它种子群参数并且也可以以其它方式接收或获得。这由方框278所指示。
58.然后,行单元106开始种植操作。这由图10的流程图中的方框280所指示。基于机器地面速度和目标种子群,马达控制信号生成系统244间歇地脉动(加速和减速)马达172和/或174,以按期望的组分离距离分离开的组或簇来种植种子。由图10的流程图中的方框282指示生成马达控制信号以使马达这样脉动。在一个示例中,系统244生成控制信号以使排种器马达172脉动,如方框284所指示。在另一示例中,系统244生成控制信号以使种子输送系统马达174脉动,如方框286所指示。在另一示例中,系统244控制马达172和174以使其彼此协调,如方框288所指示。也可基于其它输入以其它方式控制马达,这由方框290指示。
59.因此可以看出,本说明书描述了一种系统和控制机构,其控制行单元106上的马达的速度以按簇或种子组种植种子。将注意的是,可使用该马达控制机构而无需接收基本上任何传感器信号(例如种子传感器信号、机器速度信号等),并且马达速度可被简单地脉动。然而,当接收到一些传感器信号(例如,机器速度传感器)时,簇可更准确地相对于彼此放置。另外,利用附加传感器输入(例如种子传感器、机器位置等),可将簇放置在田间的期望位置,或者可跟踪并绘制其位置等。
60.还应该注意的是,本文所描述的不同示例可按不同的方式组合。即,一个或更多个示例的部分可与一个或更多个其它示例的部分组合。
61.示例1是一种种植机,包括:
62.排种器,在排种器输入部处从种子源接收种子,并且旋转以在排种器输出部处提供种子;
63.排种器马达,驱动排种器的旋转;
64.种子输送系统,从排种器输出部接收种子,并且在种子输送系统的出口端处将种子输出到犁沟中;以及
65.马达控制系统,生成马达控制信号以控制排种器马达间歇地改变排种器马达的马达速度以向种子输送系统提供具有预定数量的种子的种子组,种子组中的预定数量的种子相对于彼此紧密间隔开组内种子间距,并且种子组彼此分离开大于组内种子间距的组分离距离。
66.示例2是根据任何或所有先前示例所述的种植机,其中,种子输送系统包括:
67.输种管。
68.示例3是根据任何或所有先前示例所述的种植机,其中,排种器包括:
69.由排种器马达驱动的可旋转元件,其中限定有种子孔组,每个种子孔将种子从种子池运送到排种器输出部,每个种子孔组中的种子孔彼此分离开第一距离,并且种子孔组彼此分离开大于第一距离的第二距离。
70.示例4是根据任何或所有先前示例所述的种植机,其中,排种器包括:
71.由排种器马达驱动的可旋转元件,其中限定有种子孔,每个种子孔将种子从种子池运送到排种器输出部,种子孔彼此等距。
72.示例5是根据任何或所有先前示例所述的种植机,其中,种子输送系统包括:
73.辅助种子输送系统,使种子移动到种子输送系统的出口端。
74.示例6是根据任何或所有先前示例所述的种植机,其中,辅助种子输送系统包括:
75.接续构件,从排种器输出部接收种子并且旋转以使种子移动到种子输送系统的出口端。
76.示例7是根据任何或所有先前示例所述的种植机,其中,辅助种子输送系统包括:
77.种子输送系统马达,驱动接续构件的旋转。
78.示例8是根据任何或所有先前示例所述的种植机,其中,马达控制系统生成马达控制信号以控制种子输送系统马达使种子组移动到种子输送系统的出口端并使种子组按组分离距离从种子输送系统排出到犁沟中。
79.示例9是根据任何或所有先前示例所述的种植机并且还包括:
80.机器速度传感器,生成指示种植机的地面速度的机器速度信号,马达控制系统基于机器速度信号来生成马达控制信号。
81.示例10是根据任何或所有先前示例所述的种植机并且还包括:
82.种子传感器,生成指示种植机中的种子存在的种子信号,马达控制系统基于种子信号来生成马达控制信号。
83.示例11是根据任何或所有先前示例所述的种植机并且还包括:
84.机器位置传感器,生成指示种植机的地理位置的机器位置信号,马达控制系统基于机器位置信号来生成马达控制信号。
85.示例12是根据任何或所有先前示例所述的种植机并且还包括:
86.通信系统,基于机器位置信号向远程系统发送与各个种子组对应的位置
87.示例13是一种控制种植机的方法,包括:
88.在排种器的输入部处从种子源接收种子;
89.利用排种器马达驱动排种器旋转,以在排种器输出部处提供种子;
90.在种子输送系统的种子输送系统输入部处从排种器输出部接收种子;
91.生成马达控制信号以控制排种器马达间歇地改变排种器马达的马达速度,以向种子输送系统提供具有预定数量的种子的种子组,种子组中的预定数量的种子相对于彼此紧密地间隔开组内种子间距,并且种子组彼此分离开大于组内种子间距的组分离距离;以及
92.在种子输送系统的出口端处将种子组输出到犁沟中。
93.示例14是根据任何或所有先前示例所述的方法,其中,种子输送系统包括辅助种子输送系统,并且还包括:
94.利用辅助种子输送系统使种子移动到种子输送系统的出口端。
95.示例15是根据任何或所有先前示例所述的方法,其中,辅助种子输送系统包括从排种器输出部接收种子的接续构件,并且其中还包括:
96.利用种子输送系统马达来驱动接续构件旋转,以使种子移动到种子输送系统的出口端。
97.示例16是根据任何或所有先前示例所述的方法,其中,生成马达控制信号包括:
98.生成马达控制信号以控制种子输送系统马达,使种子组移动到种子输送系统的出口端并按组分离距离从种子输送系统排出到犁沟中。
99.示例17是根据任何或所有先前示例所述的方法并且还包括:
100.感测种植机的机器速度;以及
101.生成指示种植机的地面速度的机器速度信号,其中,生成马达控制信号包括基于机器速度信号来生成马达控制信号。
102.示例18是根据任何或所有先前示例所述的方法并且还包括:
103.感测种植机中的种子;以及
104.生成指示所感测到的种植机中的种子的种子信号,其中,生成马达控制信号包括基于种子信号来生成马达控制信号。
105.示例19是根据任何或所有先前示例所述的方法并且还包括:
106.感测种植机的地理位置;以及
107.生成指示种植机的地理位置的机器位置信号,其中,生成马达控制信号包括基于机器位置信号来生成马达控制信号。
108.示例20是一种控制种植机的方法,包括:
109.在排种器的输入部处从种子源接收种子;
110.利用排种器马达驱动排种器旋转,以在排种器输出部处提供种子;
111.在辅助种子输送系统的种子输送系统输入部处从排种器输出部接收种子;
112.利用种子输送系统马达来驱动接续构件旋转,以使种子移动到种子输送系统的出口端;
113.生成马达控制信号以控制排种器马达和种子输送系统马达中的至少一个间歇地改变马达速度,以提供具有预定数量的种子的种子组,种子组中的预定义数量的种子相对于彼此紧密地间隔开组内种子间距,并且种子组彼此分离开大于组内种子间距的组分离距离;以及
114.在种子输送系统的出口端处将种子组输出到犁沟中
115.尽管以结构特征和/或方法动作所特定的语言描述了主题,但将理解,所附权利要求中限定的主题未必限于上述特定特征或动作。相反,上述特定特征和动作被公开作为实现权利要求的示例形式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1