一种育苗杯自动种植机器人及其种植方法
本发明属于绿化设备,具体涉及一种育苗杯自动种植机器人及其种植方法。
背景技术:
1、现有的育苗杯种植设备在作业时,先通过开沟器在土地上开出植树沟或穴,用人工或铺苗设备按一定株距将树苗投放到沟中,然后由覆土压实装置将树苗根部土壤覆盖压实;该过程中需要涉及多个不同的设备,难以实现高度自动化,进而导致种树过程中需要消耗大量人力物力。此外,由于需要多个设备相配合,多个设备之间难以实现精准的重复定位也是制约现有种树机的树苗成活率的重要因素。
2、此外,现有的部分育苗杯种植设备的育苗杯推出速度单一,难以针对不同重心和底面宽度进行推出速度的调整,进而导致育苗杯在输出阶段易出现倾倒或卡住的情况。还有部分育苗杯种植设备需要通过调控电机转速的调节育苗杯的推出速度,导致设备控制逻辑复杂,成本和故障率较高;因此,需要设计一种能够在同一位置自动完成育苗杯种植全部流程,且通过电机正反转即可实现育苗杯推出速度调节的机器人。
技术实现思路
1、本发明的目的在于提供一种育苗杯自动种植机器人及其种植方法。
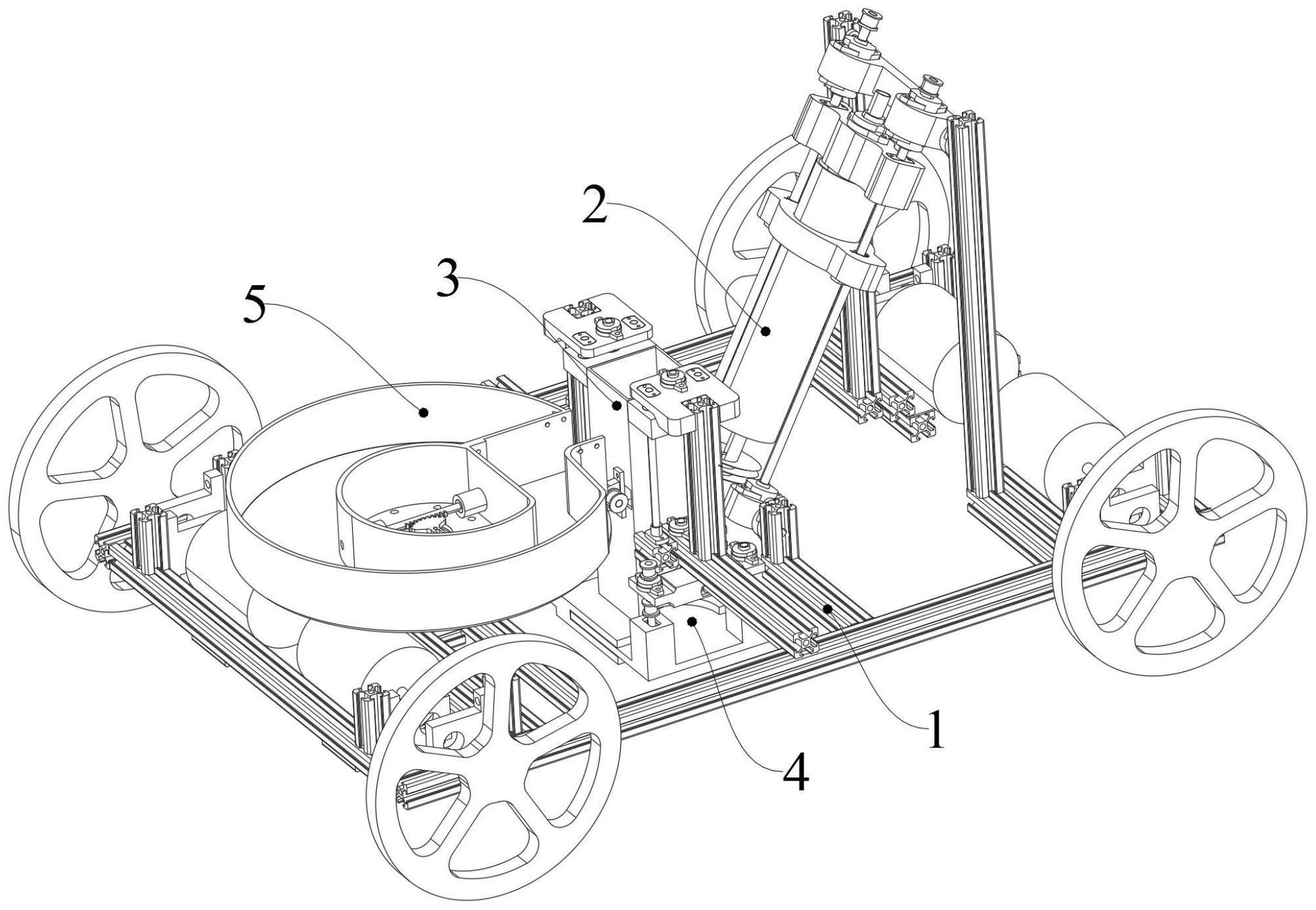
2、该育苗杯自动种植机器人,包括车架,以及安装在车架上的钻穴存土模块、冲土模块、压土模块和育苗杯储存运输模块;钻穴存土模块用于在土地中开设出树苗种植所需的坑洞;所述的育苗杯储存运输模块包括树苗存储输送通道和树苗输送盘;树苗存储输送通道安装在车架上;水平设置的树苗输送盘转动连接在车架上;呈弧形的树苗存储输送通道固定在车架上,并位于树苗输送盘的上方;位于树苗存储输送通道内的育苗杯支撑在树苗输送盘上;沿着树苗输送方向,树苗存储输送通道的宽度逐渐减小;所述的树苗输送盘由动力元件驱动旋转。
3、所述树苗存储输送通道的输出口处设置有推出组件;所述的推出组件包括推杆、摆齿轮和曲柄轮;推杆滑动连接在树苗存储输送通道的输出口处;推杆的侧部设置有齿条段;摆齿轮转动连接在树苗存储输送通道上;摆齿轮上设置有齿轮段;摆齿轮上的齿轮段与推杆上的齿条段啮合;摆齿轮远离齿轮段的一侧设置有滑槽;曲柄轮转动连接在树苗存储输送通道上;曲柄轮的侧面上偏心设置有凸柱;凸柱伸入滑槽内;曲柄轮的转动带动推杆往复滑动,将树苗存储输送通道输出口处的育苗杯推出树苗存储输送通道外;工作过程中,通过调整曲柄轮的转向,使得推杆在快出慢回模式与快出慢回模式之间切换,适应不同的育苗杯。
4、所述的冲土模块包括冲管、冲土驱动组件、翘板和翘土驱动组件;竖直设置的冲管滑动连接在机架上,并在冲土驱动组件的驱动下进行升降运动;冲管的底面倾斜设置;翘板的顶部边缘与冲管底面的上边缘转动连接;翘板在翘土驱动组件的驱动下进行翻转;冲管降低至下极限位置时,树苗存储输送通道输出的育苗杯掉落到冲管中;
5、所述的压土模块位于冲土模块的正下方,包括两块开合压板;两块开合压板均能够在动力元件的驱动下进行升降和横向移动;两块开合压板的相对侧边缘均开设有让位缺口;两个让位缺口对接在一起时,形成闭环卡口;通过两块开合压板的相向或相背运动,调整闭环卡口的大小。
6、作为优选,所述的翘土驱动组件包括同步轮、同步带和翘土驱动电机;翘土驱动电机固定在冲管外侧;翘土驱动电机的输出轴以及固定在翘板顶部边缘的转动轴上均固定有同步轮;两组同步轮通过同步带连接。
7、作为优选,所述的钻穴存土模块包括钻穴支架、第二丝杠、螺旋钻头、钻头移动架、储土移动架和储土管。钻穴支架固定在车架上。相互平行且间隔设置的两根第二丝杠均转动连接在钻穴支架上。第二丝杠的轴线与水平面呈45°~80°夹角;第二丝杠的底端倾斜朝向靠近冲土模块的一侧;第二丝杠在动力元件的驱动下同步转动。所述的钻头移动架和储土移动架均与两根丝杠通过螺母连接;储土管的顶端与储土移动架固定。螺旋钻头的驱动转轴与钻头移动架转动连接;螺旋钻头由安装在钻头移动架上的动力元件驱动旋转。
8、作为优选,所述储土移动架与两根第二丝杠之间的螺母采用开合螺母;通过储土移动架侧部的调整螺钉调节开合螺母与对应第二丝杠的连接与分离。通过将储土移动架上的开合螺母与对应的第二丝杠分离后滑动储土移动架,使得螺旋钻头在处于储土管内部的工作状态与处于储土管外部的工作状态之间切换。
9、作为优选,两根第二丝杠通过带传动机构连接;其中一根第二丝杠由电机驱动旋转。
10、作为优选,所述的螺旋钻头采用双叶螺旋钻头。
11、作为优选,两块开合压板均由两轴压土驱动组件驱动进行升降和横向运动;所述两轴压土驱动组件包括横移驱动组件和升降驱动组件;横移驱动组件包括横移丝杠和横向滑移块;横向滑移块沿水平方向滑动连接在车架上;横移丝杠支承在车架上,并由电机驱动旋转;横向滑移块与横移丝杠构成螺旋副;升降驱动组件包括升降块和升降丝杠;竖直设置的两根升降丝杠均转动连接在横向滑移块的底部;两个升降块与两根升降丝杠均构成螺旋副;两个升降块的底部与对应的开合压板的两侧分别固定。
12、作为优选,所述冲管倾斜的底面朝向靠近钻穴存土模块的一侧。
13、作为优选,所述的冲土驱动组件包括第一丝杠和冲土驱动电机。竖直设置的第一丝杠转动连接在车架上。固定在冲管上的螺母与第一丝杠构成螺旋副。第一丝杠由冲土驱动电机驱动。
14、该育苗杯自动种植机器人的种植方法,包括以下步骤:
15、步骤一、将育苗杯储存于树苗存储输送通道中。根据育苗杯的重心高度与底面宽度之比确定曲柄轮的工作转向;当育苗杯的重心高度与底面宽度之比大于或等于预设值时,曲柄轮的工作转向设定为使得推杆在慢出快回的工作模式下运行;当育苗杯的重心高度与底面宽度之比小于预设值时,曲柄轮的工作转向设定为使得推杆在快出慢回的工作模式下运行。
16、步骤二、车架沿目标方向行进,且车架每经过预设距离停顿一次;车架每次停顿后均进行种植动作。种植动作的具体过程如下:
17、2-1.钻穴存土模块在地面上开设出种植孔洞。
18、2-2.冲管向下移动并伸入到种植坑洞中;在冲管伸入种植坑洞后,翘板由关闭状态翻转至开启状态,拨动种植坑洞中的土壤。
19、2-3.树苗输送盘转动,带动各育苗杯逐渐排列;其中一个育苗杯输送至树苗存储输送通道的输出口处。推出组件中的曲柄轮以工作转向转动一周,将树苗存储输送通道输出口处的一个育苗杯推出;育苗杯在冲管的导向下掉落到种植坑洞中。
20、2-4.冲管向上复位升高。
21、2-5.压土模块中两块开合压板下降,使得两块开合压板套置在育苗杯外侧;之后,压土模块中的两块开合压板相向运动,使得闭环卡口逐渐缩小,将育苗杯扶正。
22、2-6.两块开合压板相背运动,使得闭环卡口与育苗杯分离;之后,两块开合压板向下运动,压实育苗杯周围的土壤。
23、2-7.两块开合压板向上移动至高于育苗杯顶部的位置。
24、本发明具有的有益效果是:
25、1、本发明中的冲管组件既能够为育苗杯提供导向,又能够利用翘板的翻转使得孔洞倾斜的底部变为平整状态,从而提高育苗杯种植的精准性;此外,本发明中的压土模块在压实土壤的同时,还能够通过开口大小可调的闭环卡口实现育苗杯的扶正。
26、2、本发明中的推出组件利用曲柄轮的转动配合齿轮齿条结构实现了育苗杯的推出;利用该推出组件的急回特性,本发明通过改变曲柄轮的转向,即可将育苗杯的推出动作在快出慢回与慢出快回之间切换,从而为不同重心高度的育苗杯提供最优的推出方式。
27、3、本发明通过倾斜钻孔的方式能够在冲管的正下方开设孔洞,从而使得机器人能够在依次停顿中自动完成钻穴、冲孔拨土、育苗杯种植和土壤回填,从而提高了自动种植机器人的工作效率,并避免了机器人在一次种植中发生移动后难以保证定位精度的问题。此外,倾斜钻孔能够提高钻头的破土能力,从而在更坚硬的土地上实现自动种植。
- 还没有人留言评论。精彩留言会获得点赞!