一种夹紧力可调节的果实采摘末端执行器
1.本发明涉及农业机器人技术领域,具体为一种夹紧力可调节的果实采摘末端执行器。
背景技术:
2.水果的采收工作有着很强的季节性和技术性,并且直接关系到水果的产量和质量。随着我国的机械化和智能化在各行各业的发展, 相关技术不断完善,运用于果实采摘的机械装备也逐渐出现。针对一些球状果实的采摘,比如苹果、梨子、柑桔、猕猴桃、小香瓜、火龙果等,由于果实本身并不是标准的球形,也会存在尺寸大小不一,形状变化的情况,现有的自动化采摘设备虽然可以实现对果实的夹取,也可以利用传感器检测夹爪的夹紧力,但是一般难以做到与果实表面贴合,在此情况下传感器采集的数据可能就会存在误差,对夹紧力控制不当即容易造成对果实的损伤。
技术实现要素:
3.本发明的技术目的在于针对现有技术中的不足,设计一种夹紧力可调节的果实采摘末端执行器,在具有可感知夹紧力功能的前提下,改善现有技术。
4.为实现上述技术目的,本发明提供的技术方案包括:方案一:一种夹紧力可调节的果实采摘末端执行器,包括手臂和夹爪,其特征在于,还设有旋转座、夹爪、压力传感器、钢丝绳和丝杠机构,夹爪通过旋转座与手臂连接;所述夹爪包括夹爪壳体、附着在夹爪壳体上的多个夹指以及附着在各夹指内表面的若干凸台触点;所述夹爪壳体包括一个圆柱形的套筒和位于所述套筒顶端的圆平台,所述套筒的内部安装有丝杠机构的螺杆,所述螺杆为复式螺杆,由套装在一起且同心同轴的实心轴螺杆和空心轴螺杆组成,所述空心轴螺杆套在实心轴螺杆的上部,实心轴螺杆的下部和所述空心轴螺杆上分别安装有实心轴移动螺母和空心轴移动螺母;所述夹指包括通过铰链连接的上夹指与下夹指,且上、下夹指的连接处安装有带动夹指复位的扭簧;所述上夹指由指杆、摆杆和支撑杆组成,所述摆杆位于上夹指指杆的内侧,一端通过第一铰链支座与夹爪壳体套筒的外侧壁连接,另一端与上夹指指杆的顶部固定连接;所述支撑杆则位于上夹指指杆的外侧,与上夹指指杆的底部固定连接;所述凸台触点固定安装在夹指的内表面,且上、下夹指各至少安装有一个凸台触点,所述压力传感器与凸台触点连接,用于检测夹爪对果实的夹持力;对应于所有夹指,实心轴移动螺母沿圆周设置有多个第二铰链支座,空心轴移动螺母沿圆周固定安装有多个第一限位圆环,同时,各夹指支撑杆的顶部安装有第二限位圆环,下夹指底部安装有第三限位圆环;所述夹爪壳体的套筒在对应每个夹指的位置分别设有一个沿轴向方向延伸的开
口槽,连杆的顶端穿过所述开口槽与实心轴移动螺母上的对应的第二铰链支座连接,在实心轴移动螺母带动下,实现对上夹指张角的控制;钢丝绳的顶端固定在所述第一限位圆环上,通过所述开口槽后,中间再穿过第二限位圆环,底端固定在所述第三限位圆环上,在空心轴移动螺母的带动下实现对下夹指张角的控制;所述旋转座的内部安装有一实心电机和一空心电机;所述空心电机固定在夹爪壳体的圆平台上,位于所述空心轴螺杆的正上方,空心轴螺杆上部穿过所述圆平台的中心通孔,与空心电机的输出端连接,由空心电机控制转动;所述空心电机与空心轴螺杆的中部均设有上下贯通的轴腔;所述实心电机叠置固定在空心电机的上方,实心轴螺杆穿过空心电机和空心轴螺杆的轴腔,与实心电机的输出端连接,由实心电机控制其转动。
5.在上述方案的基础上,进一步改进或优选的方案还包括:进一步的,所述手臂的内部安装有旋转电机,手臂的下部设有插入旋转座壳体的轴管,旋转座壳体通过轴承与所述轴管连接;旋转电机的电机输出轴穿过所述轴管,与位于旋转座壳体内的连轴支座固定连接,所述连轴支座的底端与夹爪外壳的圆平台固定连接;在夹爪夹住果实后,旋转电机通过所述连轴支座和圆平台带动夹爪快速转动,将果实的果梗扭断。
6.进一步的,所述连轴支座为几字座,所述的几字座包括顶板、左右两个向外翻折的底板以及连接在顶板与底板之间的支撑板,所述底板用于连接夹爪外壳的圆平台,所述空心电机和实心电机均处于所述几字座的顶板与圆平台之间。
7.进一步的,所述凸台触点为橡胶材料制成的圆柱状体,底面固定在夹指上,顶面与果实接触;所述压力传感器为圆片状的薄膜力传感器,粘贴固定在凸台触点的顶面或粘贴固定在凸台触点与夹指之间。
8.方案二:一种夹紧力可调节的果实采摘末端执行器,设有手臂和夹爪,其特征在于,其特征在于,还设有旋转座、夹爪、压力传感器、钢丝绳和丝杠机构,夹爪通过旋转座与手臂连接;所述夹爪包括夹爪壳体、附着在夹爪壳体上的多个夹指以及附着在各夹指内表面的若干凸台触点;所述夹爪壳体包括一个圆柱形的套筒、位于所述套筒顶端的圆平台和固定在所述套筒底端的底盖;所述套筒的内部安装有丝杠机构的螺杆,所述螺杆为复式螺杆,由套装在一起且同心同轴的实心轴螺杆和空心轴螺杆组成,实心轴螺杆和所述空心轴螺杆上分别安装有实心轴移动螺母和空心轴移动螺母;所述夹指包括通过铰链连接的上夹指与下夹指,且上、下夹指的连接处安装有带动夹爪复位的扭簧;所述上夹指由指杆、摆杆和支撑杆组成,所述摆杆位于上夹指指杆的内侧,一端通过第一铰链支座与夹爪壳体套筒的外侧壁连接,另一端与上夹指指杆的顶部固定连接;所述支撑杆则位于上夹指指杆的外侧,与上夹指指杆的底部固定连接;所述凸台触点固定安装在夹指的内表面,且上、下夹指各至少安装有一个凸台触点;所述压力传感器与凸台触点连接,用于检测夹爪对果实的夹持力;所述夹爪壳体在对应每个夹指的位置分别设有一个沿其轴向方向延伸的开口槽;对应于所有夹指,所述空心轴移动螺母沿圆周设有多个第二铰链支座,实心轴移动螺母的底面沿圆周设有多个第一限位圆环,底盖的下表面固定安装有多个第二限位圆
环,同时,各夹指支撑杆的顶部安装有第三限位圆环,下夹指的底部安装有第四限位圆环;所述夹爪壳体在对应每个夹指的位置分别设有一个沿螺杆轴向方向延伸的开口槽;连杆的顶端通过开口槽与对应的第二铰链支座连接,通过空心轴移动螺母的移动控制上夹指的张角;钢丝绳的顶端固定在所述第一限位圆环上,穿过下方的底盖通孔伸出夹爪壳体,并依次穿过所述第二限位圆环、第三限位圆环,最终固定到第四限位圆环上,以通过实心轴移动螺母的移动控制下夹指的张角;所述旋转座的内部安装有一实心电机和一空心电机;所述空心电机固定在夹爪壳体的圆平台上,位于所述空心轴螺杆的正上方,空心轴螺杆上部穿过所述圆平台的中心通孔,与空心电机的输出端连接,由空心电机控制转动;所述空心电机与空心轴螺杆的中部均设有上下贯通的轴腔;所述实心电机叠置固定在空心电机的上方,实心轴螺杆穿过空心电机和空心轴螺杆的轴腔,与实心电机的输出端连接,由实心电机控制其转动。
9.在上述方案的基础上,进一步改进或优选的方案还包括:进一步的,所述手臂的下部设有插入旋转座壳体的轴管,旋转座壳体通过轴承与所述轴管连接;所述手臂内安装有旋转电机,旋转电机的电机输出轴穿过所述轴管,与位于旋转座壳体内的一连轴支座固定连接,所述连轴支座的底端与夹爪外壳的圆平台固定连接;在夹爪夹住果实后,旋转电机所述连轴座和圆平台带动夹爪快速转动,将果实的果梗扭断。
10.进一步的,所述连轴座为几字座,所述的几字座包括顶板、左右两个向外翻折的底板以及连接在顶板与底板之间的支撑板,所述底板用于连接夹爪外壳的圆平台,所述空心电机和实心电机均处于所述几字座的顶板与圆平台之间。
11.进一步的,所述凸台触点为橡胶材料制成的圆柱状体,底面固定在夹指上,顶面与果实接触;所述压力传感器为圆片状的薄膜力传感器,粘贴固定在凸台触点的顶面或粘贴固定在在凸台触点与夹指之间。
12.有益效果:1)本发明果实采摘末端执行器通过对空心电机的利用,结合套筒式的双螺杆丝杠驱动机构和多关节夹爪的设计,可实现对夹爪形态的控制和对夹爪廓形的调整,驱动方式简易,并且控制精准,其中多关节夹指的设计和凸台触点的结合使用,使夹指可以更好的与果实表面贴合,确保夹牢果实以及夹爪的夹紧力能够被压力传感器准确检测到;2)本发明果实采摘末端执行器,容易实现一边收拢一边检测,确保夹牢果实的同时避免损伤水果,与本领域常用的一步到位的气动夹爪相比,可以有效的减少损伤水果的概率;3)本发明果实采摘末端执行器通过快速扭转夹爪的方式,使果柄从植株上脱离,避免了强拉硬扯果实对植株造成的伤害,并将扭转驱动机构和控制抓夹果实的驱动机构有效的组合在了一起,结构规划合理,集成度高,占用空间小。
附图说明
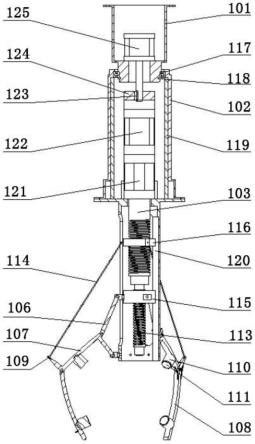
13.图1是本发明实施例1果实采摘末端执行器外观结构示意图;图2是本发明实施例1果实采摘末端执行器的纵向剖面图;图3是本发明实施例1果实采摘末端执行器的工作示意图;
图4是本发明实施例1中螺杆和夹爪结构的局部结构示意图;图5是本发明实施例1果实采摘末端执行器的整体透视图;图6是本发明实施例2果实采摘末端执行器的外观结构示意图;图7是本发明实施例2果实采摘末端执行器的纵向剖面图;图8是本发明实施例2果实采摘末端执行器的工作示意图;图9是本发明实施例2果实采摘末端执行器的局部结构示意图一;图10是本发明实施例2果实采摘末端执行器的局部结构示意图二;图11是本发明实施例2果实采摘末端执行器的整体透视图。
具体实施方式
14.现在结合附图与具体实施例对本发明作进一步详细的说明。
15.实施例1:如图1所示,一种夹紧力可调节的果实采摘末端执行器,包括手臂、旋转座、夹爪、压力传感器111和钢丝绳114等组件。
16.所述夹爪主要由夹爪壳体104、附着在夹爪壳体104上的多个夹指以及附着在各夹指内表面的若干凸台触点110等组件组成。其中,夹爪壳体104包括一个圆柱形的套筒和位于所述套筒顶端的圆平台,所述套筒的内部安装有丝杠机构的螺杆和移动螺母等结构,所述丝杠机构和钢丝绳114配合,通过移动螺母的轴向运动控制夹爪的形态(张开或合拢,以及夹爪的廓行);所述圆平台用于连接旋转座。
17.本实施例果实采摘末端执行器的夹爪为三夹指结构,三个夹指在圆周方向上呈120
°
夹角分布。以其中任一个夹指为例,如图2所示,所述夹指包括通过铰链连接的上夹指107与下夹指108,且上夹指107和下夹指108的连接处安装有一个位于夹指内侧的扭簧112,所述扭簧112两端的扭臂分别与上夹指107与下夹指108连接,受扭簧112的牵制,初始状态下,在远离手臂的轴向方向上,上夹指107向外张开,而下夹指108则是向内收拢,三个夹指围成合拢状态的夹爪,形成适合抓取球形果实的夹爪结构。
18.上述的夹爪结构中:所述上夹指107由指杆、摆杆和支撑杆组成,所述摆杆位于上夹指107指杆的内侧,一端通过第一铰链支座与夹爪壳体104套筒的外侧壁连接,另一端与上夹指107指杆的顶部固定连接,且与上夹指107指杆相垂直;所述支撑杆则位于上夹指107指杆的外侧,与上夹指107指杆的底部固定连接,与上夹指107指杆相垂直。所述支撑杆的顶部和下夹指108的底部均固定安装有羊眼钉,所述羊眼钉设有圆环结构,可作为钢丝绳114的限位结构或固定结构,以控制其的走向,故所述羊眼钉也可以替换为其它能够限制钢丝绳114走向和位置的零件,下同。
19.所述凸台触点110固定安装在上夹指107和下夹指108指杆的内表面,且上、下夹指各至少安装有一个凸台触点110。所述压力传感器111附着在所述凸台触点110上,用于检测夹爪对果实3的夹紧力。
20.本实施例中,所述凸台触点110设计为圆柱体,优选采用橡胶材料制成,以免损伤果实;所述压力传感器111则采用了圆片状的薄膜力传感器,所述薄膜力传感器可以产生耦合于其所承受压力的电信号,其为现有技术,此处即不再赘述。所述薄膜力传感器一一对应的固定在所述凸台触点111的顶端,其感应区域的形状与凸台触点111顶端的端面形状一
致,覆盖了凸台触点111与果实3接触的部位,以确保检测结果的准确度。作为可选的实施例方式,所述薄膜力传感器也可以安装在凸台触点110与夹指之间,具体的操作方式为将薄膜力传感器的正反两面均匀涂抹胶水,分别与凸台触点110的底面和夹指的表面粘接,夹爪对果实的夹紧力会直接传递到薄膜力传感器上,且此种方式中,薄膜力传感器不易被磨损。
21.为进一步了解果实采摘末端执行器的内部结构,将其进行剖切,如图2所示。
22.上述丝杠机构的螺杆为复式螺杆,由套装在一起的实心轴螺杆113和空心轴螺杆103组成。所述实心轴螺杆113和空心轴螺杆103的中轴线在同一直线上,空心轴螺杆103套在实心轴螺杆113的上部。所述空心轴螺杆103和实心轴螺杆113伸出空心轴螺杆的部位分别安装有空心轴移动螺母116和实心轴移动螺母115,在对应的电机驱动下,二者可沿着对应的螺杆杆体上下移动。所述实心轴螺杆113和空心轴螺杆均优选采用梯形螺纹。在对应三个夹指的位置,所述空心轴移动螺母116沿圆周固定安装有三个羊眼钉,实心轴移动螺母115沿圆周设有三个第二铰链支座,所述第二铰链支座位于所述第一铰链支座的正上方。设空心轴移动螺母116上的羊眼钉的圆环为第一限位圆环,上夹指支撑杆顶部的羊眼钉的圆环为第二限位圆环,下夹指底部的羊眼钉的圆环为第三限位圆环,对应同一夹指的三个限位圆环位于螺杆的同一径向方向上。所述夹爪壳体104在对应每个夹指的位置分别设有一个沿螺杆轴向方向延伸的开口槽,使连杆106和所述钢丝绳114能够穿过所述开口槽进入夹爪壳体104内,与对应的第二铰链支座和羊眼钉连接,如图2所示:连杆106的顶端与实心轴移动螺母115上的第二铰链支座连接,通过实心轴移动螺母115的轴向运动控制上夹指107的张角;钢丝绳114的顶端固定在所述第一限位圆环上,从所述开口槽中通过后,中间再穿过所述第二限位圆环,最终底端固定在所述第三限位圆环上,通过空心轴移动螺母115的轴向运动即可控制下夹指108的张角。
23.所述旋转座的设有上下贯通的壳腔,旋转座壳体102的顶端设有环形端盖,底端设有向外凸起的法兰凸缘结构,用于连接夹爪壳体104的圆平台。所述旋转座的内部安装有两台电机,一为实心电机122,一为空心电机121,分别用于驱动所述实心轴螺杆113和空心轴螺杆103转动。两电机的壳体叠摞固定在所述圆平台上,位于一几字座124的顶板下方。所述空心电机121位于所述空心轴螺杆103的正上方,空心轴螺杆103上部穿过所述圆平台中部的通孔,与空心电机121的输出端连接为一体。所述实心电机122为普通电机,而所述空心电机121为中部设有通孔轴腔的电机,其中部的通孔轴腔与空心轴螺杆103中部的轴腔上下连通。实心电机122设置在空心电机121的上方,实心轴螺杆113穿过空心电机121和空心轴螺杆103的轴腔,与实心电机122的输出端连接为一体。
24.所述空心轴移动螺母116和实心轴移动螺母115在轴向方向的同一侧均切有第一键槽,夹爪外壳104套筒的内壁在对应的位置切有第二键槽,将键120通过螺钉固定在所述第二键槽内,键120凸出于第二键槽的部分嵌在两移动螺母的第一键槽中,因此空心轴移动螺母116与实心轴移动螺母115可沿键120轴向运动而不发生转动。
25.所述几字座124固定在夹爪外壳104的圆平台上,设有一顶板和左右两个向外翻折的底板,以及两侧的支撑板,呈几字型。
26.手臂壳体101的下部设有插入旋转座壳体102的轴管,旋转座壳体102通过轴承117与所述轴管连接,使旋转座与手臂可发生相对转动。所述轴承117可采用深沟球轴承,轴承内圈安装在所述轴管的轴肩处,并通过卡簧118紧定,轴承外圈紧贴旋转座壳体102内壁,上
方通过所述环形端盖固定,下方通过定位套筒119固定。所述定位套筒119为卡在轴承外圈与圆平台之间的空心筒结构,其外壁贴靠在旋转座壳体102的内壁上,所述几字座124、空心电机121和实心电机122均设置在所述定位套筒119的筒腔中。
27.所述手臂内还安装有旋转电机125,旋转电机125的电机输出轴通过电机键123与几字座124的顶板连接。在夹爪夹住果实后,旋转电机125通过几字座124、圆平台带动夹爪快速转动,便可将果实的果梗扭断完成果实的采摘。轴承117可以有效地承担旋转电机125输出轴上的轴向力与径向力,避免损坏电机。
28.工作原理:本实施例设计的夹紧力可调节的果实采摘末端执行器可通过手臂壳体101末端的法兰端面进一步的与水果采摘机器人连接。当进行果实采摘时,首先控制空心电机121与实心电机122正转,将空心轴移动螺母116与实心轴移动螺母115分别向靠近电机的方向移动,空心轴移动螺母116会通过钢丝绳114拉动下夹指108向外张开,实心轴移动螺母115通过连杆106带动上夹指107进一步的张开,在此过程中,下夹指108以其与上夹指107的铰接轴为中心转动,上夹指107的指杆以其与连杆106的铰接轴为心中转动,上夹指107的摆杆以第一铰链支座为中心转动。当果实3在夹爪的可包络范围内时,控制空心电机121与实心轴电机122反转,将空心轴移动螺母116与实心轴移动螺母115向远离电机的方向移动,上夹指107在连杆106的驱动下收拢,钢丝绳114被释放,在扭簧112的弹力作用下,下夹指108收拢,二者均向初始的合拢状态变化,以此来夹紧果实。在夹紧果实的过程中,凸台触点111上的薄膜力传感器实时检测夹爪的夹紧力,并向控制系统发送,通过这种一边检测一边收拢的方式,以便及时感知夹爪对果实的夹紧力。当夹持住果实后,通过控制手臂中的旋转电机125转动,带动夹爪快速反复扭转,将果实的果梗扭断,完成对果实的采摘。而对于形状不标准的果实,根据各压力传感器反馈的检测信号,所述空心电机121与实心电机122也可实施独立的控制,以调整夹爪合拢后的形状。
29.实施例2:本实施例一种夹紧力可调节的果实采摘末端执行器,与实施例1的主要的不同点在于钢丝绳211的走向设计和夹爪的廓形。
30.具体如图6至图11所示,本实施例的一种夹紧力可调节的果实采摘末端执行器,包括手臂、旋转座、夹爪、压力传感器208和钢丝绳211等组件。
31.所述夹爪主要由夹爪壳体203、附着在夹爪壳体203上的多个夹指以及附着在各夹指内表面的若干凸台触点209等组件组成。所述夹爪壳体207包括一个圆柱形的套筒、位于所述套筒顶端的圆平台和安装在所述套筒底端的底盖207。所述套筒的内部安装有丝杠机构的螺杆和移动螺母等结构,所述丝杠机构和钢丝绳211配合,通过移动螺母的轴向运动控制夹爪的形态(张开或合拢,以及夹爪的廓行);所述圆平台用于连接旋转座。
32.本实施例果实采摘末端执行器的夹爪为三夹指结构,三个夹指在圆周方向上呈120
°
夹角分布。以其中任一个夹指为例,所述夹指包括通过铰链连接的上夹指205与下夹指206,且上夹指205和下夹指206的连接处安装有一个位于夹指内侧的扭簧211,所述扭簧211两端的扭臂分别与上夹指205与下夹指206连接,受扭簧211的牵制,初始状态下,在远离手臂的轴向方向上,上夹指205向外张开,而下夹指206则是向内收拢,三个夹指围成合拢状态的夹爪,形成适合抓取球形果实的夹爪结构。
33.上述的夹爪结构中:所述上夹指205由指杆、摆杆和一支撑杆组成,所述摆杆位于上夹指205指杆的内侧,一端通过第一铰链支座与夹爪壳体203套筒的外侧壁连接,另一端与上夹指205指杆的顶部固定连接,且与上夹指205指杆相垂直;所述支撑杆则位于上夹指205指杆的外侧,与上夹指205指杆的底部固定连接,与上夹指205指杆相垂直。所述支撑杆的顶部和下夹指206的底部均固定安装有羊眼钉,所述羊眼钉设有圆环结构,可作为钢丝绳210的限位结构或固定结构,以控制其的走向,故所述羊眼钉也可以替换为其它能够限制钢丝绳210走向和位置的零件,下同。
34.所述凸台触点209固定安装在上夹指205和下夹指206指杆的内表面,且上、下夹指各至少安装有一个凸台触点209。所述压力传感器208附着在所述凸台触点209上,用于检测夹爪对果实3的夹紧力。本实施例中,所述凸台触点209设计为圆柱状,优选采用橡胶材料制成,以免损伤果实;所述压力传感器208则采用了圆片状的薄膜力传感器。所述薄膜力传感器一一对应的固定在所述凸台触点209的顶端,其感应区域的形状与凸台触点207顶端的端面形状一致,覆盖了凸台触点209与果实3接触的部位,以确保检测结果的准确度。作为可选的实施例方式,所述薄膜力传感器也可以安装在凸台触点209与夹指之间,具体的操作方式与实施例1相同。
35.为进一步了解果实采摘末端执行器的内部结构,将其进行剖切,如图7所示。
36.上述丝杠机构的螺杆为复式螺杆,由套装在一起的实心轴螺杆222和空心轴螺杆218组成。所述实心轴螺杆222和空心轴螺杆218的中轴线在同一直线上。空心轴螺杆222和实心轴螺杆218上分别安装有空心轴移动螺母214和实心轴移动螺母220,在对应的电机驱动下,二者可沿着对应的螺杆杆体上下移动。所述实心轴螺杆222和空心轴螺杆218均优选采用梯形螺纹。在对应三个夹指的位置,所述实心轴移动螺母220沿圆周固定安装有三个羊眼钉,空心轴移动螺母214沿圆周设有三个第二铰链支座213,所述第二铰链支座213与第一铰链支座一一对应,且位于所述第一铰链支座的正上方。所述底盖207上设有容钢丝绳211通过的通孔,底盖207的底部在对应三个夹爪也分别固定安装了三个羊眼钉。设实心轴移动螺母220上的羊眼钉圆环为第一限位圆环,底盖207上的羊眼钉圆环为第二限位圆环,上夹指支撑杆顶部的羊眼钉圆环为第三限位圆环,下夹指底部的羊眼钉圆环为第四限位圆环,对应同一夹指的四个限位圆环位于螺杆的同一径向方向上。所述夹爪壳体203在对应每个夹指的位置分别设有一个沿螺杆轴向方向延伸的开口槽,使连杆204能够穿过所述开口槽进入夹爪壳体203内,与对应的第二铰链支座连接,如图7所示,连杆204的顶端通过开口槽与空心轴滑块215上的第二铰链支座连接,通过空心轴滑块215的移动控制上夹指的张角;钢丝绳210的顶端固定在所述第一限位圆环上,从下方伸出夹爪壳体203,依次穿过所述第二限位圆环、第三限位圆环,最终固定到第四限位圆环上,通过实心轴移动螺母220的移动控制下夹指的张角。
37.所述旋转座的设有上下贯通的壳腔,旋转座壳体202的顶端设有环形端盖,底端设有向外凸起的法兰凸缘结构,用于连接夹爪壳体203的圆平台。所述旋转座的内部安装有两台电机,一为实心电机224,一为空心电机223,分别用于驱动所述实心轴螺杆222和空心轴螺杆218转动。两电机的壳体叠摞固定在所述圆平台上,位于一几字座225的顶板下方。所述空心电机223位于所述空心轴螺杆218的正上方,空心轴螺杆218上部穿过所述圆平台中部的通孔,与空心电机223的输出端连接为一体。所述实心电机224为普通电机,而所述空心电
机223的中部则设有通孔轴腔,与空心轴螺杆218中部的轴腔上下连通。所述实心电机224设置在空心电机223的上方,实心轴螺杆222穿过空心电机223和空心轴螺杆218的轴腔,与实心电机224的输出端连接为一体。
38.所述空心轴移动螺母214在轴向方向的一侧切有第一键槽,夹爪外壳203套筒的内壁在对应的位置切有第二键槽,将键219通过螺钉固定在所述第二键槽内,键219凸出于第二键槽的部分嵌在所述第一键槽中,因此空心轴移动螺母214可沿键120轴向运动而不发生转动。同时,所述底盖207上固定有一个导向杆221,实心轴移动螺母222上有一限位通孔,导向杆221上部从所述定位通孔中穿过,与实心轴螺杆220始终保持平行,因此实心轴移动螺母220可沿导向杆221移动而不发生转动。
39.所述几字座225固定在夹爪外壳203的圆平台上,设有一顶板和左右两个向外翻折的底板,以及两侧的支撑板,呈几字型。手臂壳体201的下部设有插入旋转座壳体202的轴管,旋转座壳体202通过轴承215与所述轴管连接,使旋转座与手臂可发生相对转动。所述轴承215采用深沟球轴承,轴承内圈安装在所述轴管的轴肩处,并通过卡簧216紧定,轴承外圈紧贴旋转座壳体202内壁,上方通过所述环形端盖固定,下方通过定位套筒217固定。所述定位套筒217为卡在轴承外圈与圆平台之间的空心筒结构,其外壁贴靠在旋转座壳体202的内壁上,所述几字座225、空心电机223和实心电机224均设置在所述定位套筒217的筒腔中。
40.所述手臂内还安装有旋转电机227,旋转电机227的电机输出轴通过电机键226与几字座225的顶板连接。在夹爪夹住果实后,旋转电机227通过几字座225、圆平台带动夹爪快速转动,便可将果实的果梗扭断完成果实的采摘。轴承215可以有效地承担旋转电机227输出轴上的轴向力与径向力,避免损坏电机。
41.工作原理:本实施例设计的夹紧力可调节的果实采摘末端执行器可通过手臂壳体201末端的法兰端面进一步的与水果采摘机器人连接。当进行果实采摘时,首先控制空心电机223与实心电机224正转,将空心轴移动螺母214与实心轴移动螺母220分别向靠近电机的方向移动,实心轴移动螺母220会通过钢丝绳211拉动下夹指206向外张开,空心轴移动螺母214通过连杆205带动上夹指205进一步的张开,在此过程中,下夹指206以其与上夹指205的铰接轴为中心转动,上夹指205的指杆以其与连杆204的铰接轴为心中转动,上夹指205的摆杆以第一铰链支座为中心转动。当果实3在夹爪的可包络范围内时,控制空心电机223与实心电机224反转,将空心轴移动螺母214与实心轴移动螺母220向远离电机的方向移动,上夹指205在连杆204的驱动下收拢,钢丝绳211被释放,在扭簧210的弹力作用下,下夹指206收拢,二者均向初始的合拢状态变化,以此来夹紧果实。在夹紧果实的过程中,凸台触点209上的薄膜力传感器208实时检测夹爪的夹紧力,并向控制系统发送,通过这种一边检测一边收拢的方式,以便及时感知夹爪对果实的夹紧力。当夹持住果实后,通过控制手臂中的旋转电机227转动,带动夹爪快速反复扭转,将果实的果梗扭断,完成对果实的采摘。对于形状不标准的果实,根据各压力传感器反馈的检测信号,所述空心电机223和实心电机224也可实施独立的控制,以调整夹爪的廓形,适应果实形状的差异。
42.需要注意的是,发明中所引用的如“上”、“下”、“左”、“右”、“前”、“后”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
43.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1