作业车辆的制作方法
1.本发明涉及作业车辆。
背景技术:
2.已知具有自动行驶模式的作业车辆(例如参照专利文献1)。自动行驶模式是作业车辆沿着预先决定的行驶路径行驶的模式。在专利文献1中,公开有具有自动行驶模式的插秧机。
3.专利文献1的插秧机具备无线通信终端。插秧机的用户使用无线通信终端进行与自动行驶有关的设定。插秧机基于该设定进行自动行驶。在专利文献1的插秧机中,无线通信终端配置为与转向操纵手柄的上部的高度一致。
4.另外,在具有自动行驶模式的作业车辆中,存在若驾驶员在自动行驶中操作转向操作部(例如转向操纵手柄)则使自动行驶停止的作业车辆。这种作业车辆的驾驶员在自动行驶中将手从转向操作部离开。然而,当在行驶中(自动行驶中)将手从转向操作部离开且不抓住任何东西的状态下,驾驶员的姿势变得不稳定。由此,驾驶员通常为了使自身的姿势稳定,而将臂部搭在配置于驾驶座椅两侧的肘托,并用手抓住肘托。
5.专利文献1:日本特开2020-122997号公报
6.然而,在将与转向操纵手柄(转向操作部)的上部的高度一致地配置无线通信终端(操作终端)的结构应用于具备变速操作件的作业车辆的情况下,无线通信终端(操作终端)被配置在与变速操作件的上部的高度不一致的位置。其结果是,在自动行驶开始时驾驶员的视线上下大幅移动。
7.具体而言,在具备变速操作件的作业车辆中,驾驶员在操作操作终端来指示自动行驶模式开始后,操作变速操作件使作业车辆的行驶(自动行驶)开始。因此,在对操作终端进行操作后需要操作变速操作件。由此,在操作终端被配置在与变速操作件的上部的高度不一致的位置的作业车辆中,在自动行驶开始时驾驶员的视线上下大幅移动。
8.另外,如专利文献1的插秧机那样,在无线通信终端配置在转向操纵手柄的附近的结构中,若将臂部搭在肘托,并用手抓住肘托,则手的位置距操作终端的距离变远,所以驾驶员难以对操作终端进行操作。
技术实现要素:
9.本发明是鉴于上述课题而完成的,其目的在于提供一种难以使驾驶员的视线上下大幅移动的作业车辆,以及提供一种能够提高操作终端的操作性的作业车辆。
10.在本发明中,作业车辆具有沿着预先决定的行驶路径行驶的自动行驶模式。作业车辆具备行驶装置、驾驶座椅、转向操作部、变速操作件、以及操作终端。上述行驶装置进行行驶。驾驶员就座于上述驾驶座椅。上述转向操作部通过上述驾驶员的操作使上述行驶装置行驶的朝向变化。上述变速操作件通过上述驾驶员的操作使上述行驶装置的行进方向在前进与后退之间切换。上述操作终端接受上述驾驶员的操作。上述操作终端接受指示上述
自动行驶模式开始的操作。上述操作终端配置为与上述变速操作件的上部的高度一致。
11.另外,在上述作业车辆中,把持部件配置在上述操作终端的附近,供上述驾驶员把持。上述操作终端接受指示上述自动行驶模式开始的操作。
12.根据本发明所涉及的作业车辆,难以使驾驶员的视线上下大幅移动。
13.另外,能够提高操作终端的操作性。
附图说明
14.图1是本发明的实施方式所涉及的作业车辆的左侧视图。
15.图2是表示驾驶座椅的周边的俯视图。
16.图3是表示扶手的周边的立体图。
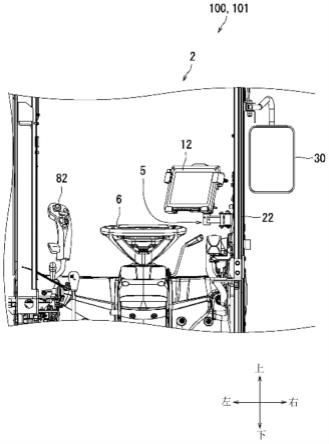
17.图4是表示从后方观察到的操作终端的周边的图。
18.图5是表示从后方观察到的操作终端的周边的放大图。
19.图6是表示从前方观察到的操作终端的周边的放大图。
20.图7是表示本发明的实施方式所涉及的作业车辆的结构的框图。
21.图8是表示田地的一个例子的图。
22.图9是表示操作终端中显示的第一画面的图。
23.图10是表示操作终端中显示的第二画面的图。
24.图11是表示操作终端中显示的第三画面的图。
25.图12是表示操作终端中显示的第四画面的图。
26.附图标记说明
[0027]2…
驾驶室;4
…
驾驶座椅;6
…
转向操纵手柄(转向操作部);8
…
侧面板;12
…
操作终端;14
…
显示装置;22
…
框架;28
…
支柱;30
…
后视镜;42
…
右侧肘托;46
…
扶手(把持部件);46a
…
弯曲部;81
…
开关;82
…
主变速杆(变速操作件);100
…
作业车辆;102
…
行驶装置;121
…
触摸显示器;121a
…
显示部;121b
…
触摸传感器;b1
…
开始按钮;b2
…
停止按钮;b3
…
模式切换按钮;sg
…
行驶路径。
具体实施方式
[0028]
以下,参照附图(图1~图12)对本发明的作业车辆所涉及的实施方式进行说明。其中,本发明并不限定于以下实施方式,能够在不脱离其主旨的范围内在各种形态中实施。此外,对说明重复的部位,存在适当地省略说明的情况。另外,在附图中对同一或者相当的部分标注同一附图标记,不重复说明。
[0029]
首先,参照图1对本实施方式的作业车辆100进行说明。图1是本实施方式的作业车辆100的左侧视图。作业车辆100具有手动行驶模式和自动行驶模式。手动行驶模式是作业车辆100的驾驶员手动地操作作业车辆100的模式。自动行驶模式是作业车辆100沿着预先决定的行驶路径sg行驶的模式。在本实施方式中,作业车辆100是自脱型联合收割机。
[0030]
此外,在本说明书中,为了容易理解,有时记载前后方向、左右方向以及上下方向。这里,前后方向、左右方向以及上下方向是基于就座于驾驶座椅4(参照图2)的驾驶员进行观察的方向。其中,仅是为了方便说明而定义前后方向、左右方向以及上下方向,并不意图通过这些方向的定义来限定本发明的作业车辆使用时以及组装时的朝向。
[0031]
如图1所示,本实施方式的作业车辆100具备行驶机体101、行驶装置102、收割装置200。行驶装置102配置在行驶机体101的下方,支承行驶机体101。收割装置200配置在行驶机体101的前方。
[0032]
行驶机体101(作业车辆100)具备发动机(未图示)。发动机例如是柴油发动机。发动机将使燃料燃烧而得到的热能变换为动能(动力)。
[0033]
行驶装置102使作业车辆100行驶。具体而言,行驶装置102基于在发动机中生成的动力(动能)进行行驶。行驶装置102例如包括左右一对行驶履带装置。左右一对行驶履带装置使作业车辆100在前后方向上行驶。另外,左右一对行驶履带装置使作业车辆100在左右方向上转弯。
[0034]
收割装置200基于在发动机中生成的动力(动能)进行驱动。收割装置200收割田地h的未收割谷杆。在本实施方式中,收割装置200具备收割框架201、割刀装置202、谷杆拉起装置203、谷杆输送装置204、以及分禾体205。
[0035]
收割框架201以能够升降的方式装配在行驶机体101的前部。割刀装置202配置在收割框架201的下方。割刀装置202收割田地h的未收割谷杆。具体而言,割刀装置202具有割刀。割刀装置202为了切断田地h的未收割谷杆的根株部而使割刀往复移动。
[0036]
谷杆拉起装置203配置在收割框架201的前方,拉起田地h的未收割谷杆。割刀装置202切断由谷杆拉起装置203拉起了的未收割谷杆的根株部。谷杆输送装置204将由割刀装置202收割了的收割谷杆输送到脱粒装置300。
[0037]
分禾体205配置在谷杆拉起装置203的前方,逐条分拨田地h的未收割谷杆。例如,分禾体205逐条分拨6条的量或者7条的量的未收割谷杆。谷杆拉起装置203逐条拉起由分禾体205分拨出的未收割谷杆。
[0038]
作业车辆100能够一边驱动行驶装置102在田地h内移动,一边驱动收割装置200连续地收割田地h的未收割谷杆。
[0039]
接着,参照图1对本实施方式的作业车辆100进一步进行说明。如图1所示,行驶机体101(作业车辆100)具备脱粒装置300。另外,行驶机体101(作业车辆100)还具备谷粒箱(未图示)。
[0040]
脱粒装置300基于在发动机内生成的动力(动能)进行驱动。脱粒装置300对由谷杆输送装置204输送至行驶机体101的收割谷杆进行脱粒。谷粒箱贮存由脱粒装置300脱粒了的谷粒。具体而言,脱粒装置300具备脱粒滚筒301、摆动筛选盤302、扬谷风扇303、处理滚筒304、以及排尘风扇305。另外,脱粒装置300还具备二次处理部(未图示)。
[0041]
向脱粒滚筒301导入收割谷杆的杆梢侧。脱粒滚筒301将收割谷杆的杆梢侧脱粒。摆动筛选盤302配置在脱粒滚筒301的下方。摆动筛选盤302摆动筛选(比重筛选)从脱粒滚筒301落下了的脱粒物。详细而言,摆动筛选盤302将从脱粒滚筒301落下了的脱粒物筛选为谷粒(一次筛选物)和带枝梗的谷粒等二次筛选物。
[0042]
扬谷风扇303向摆动筛选盤302供给筛选风。其结果是,谷粒(一次筛选物)中的草屑、夹杂物由来自扬谷风扇303的筛选风去除。去除了草屑、夹杂物的谷粒(一次筛选物)从摆动筛选盤302落下后,贮存于谷粒箱。
[0043]
带枝梗的谷粒等二次筛选物从摆动筛选盤302落下后,经由二次处理部,返回至摆动筛选盤302。二次处理部从二次筛选物去除枝梗等。摆动筛选盤302重新筛选由二次处理
部处理后的二次筛选物。
[0044]
处理滚筒304重新处理从脱粒滚筒301的后部取出的脱粒排出物。排尘风扇305将摆动筛选盤302的后部的排尘向机外排出。
[0045]
接着,参照图1以及图2对本实施方式的作业车辆100进一步进行说明。如图1所示,行驶机体101(作业车辆100)还具备驾驶室2。驾驶室2为箱状,在驾驶室2的内部形成有供作业车辆100的驾驶员使用的驾驶空间2a。在驾驶空间2a配置图2所示的驾驶座椅4。如图1所示,驾驶室2具有框架22和左侧窗部24a。左侧窗部24a配置在驾驶空间2a的左方,由框架22支承。
[0046]
图2是表示驾驶座椅4的周边的俯视图。如图2所示,行驶机体101(作业车辆100)还具备驾驶座椅4、转向操纵手柄6、侧面板8、操作终端12、显示装置14、右侧肘托42、左侧肘托44、扶手46、主变速杆82以及后视镜30。驾驶室2还具有前侧窗部24b。前侧窗部24b配置在驾驶空间2a的前方,由框架22支承。
[0047]
驾驶座椅4、转向操纵手柄6、侧面板8、操作终端12、显示装置14、右侧肘托42、左侧肘托44、扶手46以及主变速杆82配置在驾驶空间2a内(驾驶室2的内部)。后视镜30配置在驾驶室2的外部,由框架22支承。作业车辆100的驾驶员能够经由前侧窗部24b的右侧侧部或者图3所示的右侧窗部24c视觉确认后视镜30。因此,作业车辆100的驾驶员能够经由后视镜30视觉确认作业车辆100的后方以及后侧方。
[0048]
作业车辆100的驾驶员就座于驾驶座椅4。转向操纵手柄6配置在驾驶座椅4的前方。转向操纵手柄6由就座于驾驶座椅4的驾驶员操作,使图1所示的行驶装置102行驶的朝向变化。转向操纵手柄6是转向操作部的一个例子。在作业车辆100的模式为手动行驶模式时,驾驶员能够操作转向操纵手柄6使作业车辆100转弯。转弯例如包括90度掉头(α掉头)、u字掉头以及鱼尾掉头。
[0049]
侧面板8配置在驾驶座椅4的左方。侧面板8具有各种开关81。主变速杆82配置在侧面板8。因此,主变速杆82配置在驾驶座椅4的左方。主变速杆82由就座于驾驶座椅4的驾驶员操作,使图1所示的行驶装置102的行进方向在前进与后退之间切换。主变速杆82是变速操作件的一个例子。
[0050]
更详细而言,主变速杆82向前侧以及后侧倾动自如。在手动行驶模式时,若主变速杆82向前侧倾动,则作业车辆100前进,若主变速杆82向后侧倾动,则作业车辆100后退。另外,行驶装置102以与主变速杆82的倾动量相应的速度行驶。具体而言,主变速杆82的倾动量越大,行驶速度越大。此外,在主变速杆82既不向前侧也不向后侧倾动时,行驶装置102不行驶。
[0051]
此外,主变速杆82具有各种开关。主变速杆82的各种开关例如包括:用于调节脱粒深度的开关、用于使收割装置200上升的开关、用于使收割装置200下降的开关、以及用于调整收割装置200的高度的开关。
[0052]
操作终端12配置在转向操纵手柄6的附近。在本实施方式中,操作终端12配置在转向操纵手柄6的右侧旁边。因此,操作终端12配置在相对于驾驶座椅4而与主变速杆82侧相反的一侧。另外,在俯视时,转向操纵手柄6配置在主变速杆82与操作终端12之间。操作终端12例如是平板终端。如参照图5后文叙述那样,操作终端12具有触摸显示器121,能够使各种画面显示于触摸显示器121。
[0053]
操作终端12接受由驾驶员进行的操作。更具体而言,操作终端12接受指示自动行驶模式开始的操作。详细而言,驾驶员在操作操作终端12指示自动行驶模式开始后,使主变速杆82向前侧倾动。其结果是,作业车辆100(行驶装置102)进行自动行驶。另外,驾驶员能够操作操作终端12来指示自动行驶模式停止或者中断。并且,驾驶员能够操作操作终端12来设定与自动行驶有关的各种条件。
[0054]
显示装置14显示规定的图像。显示装置14例如显示发动机的转速。在俯视时,显示装置14配置在操作终端12与主变速杆82之间。因此,显示装置14配置在相对于操作终端12比较近的位置。其结果是,驾驶员能够不使视线大幅移动地视觉确认操作终端12的触摸显示器121(图5)和显示装置14。在本实施方式中,显示装置14配置在转向操纵手柄6的内侧。
[0055]
右侧肘托42配置在驾驶座椅4的右侧旁边,支承于图3所示的上下用车门26。左侧肘托44配置在驾驶座椅4的左侧旁边,支承于驾驶座椅4。就座于驾驶座椅4的驾驶员能够将左右臂的肘部分别搭在右侧肘托42以及左侧肘托44。
[0056]
扶手46支承于图3所示的上下用车门26,从右侧肘托42与上下用车门26之间比右侧肘托42更向前方延伸。如图2所示,扶手46的前侧的端部位于操作终端12的附近。扶手46由就座于驾驶座椅4的驾驶员把持。具体而言,扶手46中的比右侧肘托42靠前侧的部分由驾驶员把持。换言之,扶手46中的操作终端12侧的部分由驾驶员把持。扶手46是把持部件的一个例子。此外,在以下说明中,有时将扶手46中的比右侧肘托42靠前侧的部分记载为“扶手46的前侧部分”。
[0057]
根据本实施方式,驾驶员能够在自动行驶时用右手把持扶手46。因此,自动行驶时的驾驶员的姿势稳定。并且,扶手46的前侧的端部位于操作终端12的附近。由此,驾驶员把持扶手46的前侧部分,从而驾驶员的手的位置距操作终端12的距离变近。其结果是,由驾驶员进行的对操作终端12的操作性提高。例如,驾驶员能够在自动行驶中容易地对操作终端12进行指示自动行驶模式停止或者中断的操作。
[0058]
接着,参照图2对本实施方式的作业车辆100进一步进行说明。如已经说明那样,驾驶员在自动行驶时把持扶手46的前侧部分。如图2所示,基于就座于驾驶座椅4的驾驶员进行观察时,操作终端12配置在扶手46的前方。其结果是,驾驶员更容易对操作终端12进行操作。
[0059]
接着,参照图3对本实施方式的作业车辆100进行说明。图3是表示扶手46的周边的立体图。如图3所示,驾驶室2还具有右侧窗部24c和上下用车门26。右侧窗部24c以及上下用车门26配置在图2所示的驾驶空间2a的右方。上下用车门26由框架22支承为开闭自如。右侧窗部24c支承于上下用车门26。驾驶员打开上下用车门26来上下驾驶室2。
[0060]
如图3所示,右侧肘托42以及扶手46固定于上下用车门26。更详细而言,右侧肘托42以及扶手46安装于上下用车门26的内侧。因此,在打开了上下用车门26时,右侧肘托42以及扶手46向驾驶室2的外部移动。由此,与右侧肘托42以及扶手46固定于驾驶室2的内部的结构相比,驾驶员容易上下驾驶室2。
[0061]
接着,参照图2以及图3对本实施方式的作业车辆100进一步进行说明。如图2以及图3所示,扶手46具有弯曲部46a。弯曲部46a从上下用车门26向转向操纵手柄6侧弯曲。换言之,弯曲部46a从上下用车门26朝向驾驶室2的内侧弯曲。弯曲部46a包含于扶手46中的靠操作终端12侧的部分。换言之,弯曲部46a包含于扶手46的前侧部分。
[0062]
根据本实施方式,弯曲部46a朝向驾驶室2的内侧弯曲,因此在扶手46(弯曲部46a)与上下用车门26之间产生缝隙。其结果是,驾驶员容易把持扶手46(弯曲部46a)。并且,弯曲部46a向驾驶员侧弯曲。其结果是,驾驶员容易把持扶手46(弯曲部46a)。
[0063]
接着,参照图2对本实施方式的作业车辆100进一步进行说明。如图2所示,基于就座于驾驶座椅4的驾驶员进行观察时,弯曲部46a配置在右侧肘托42的前方。因此,驾驶员能够在将右臂的肘部搭在右侧肘托42的状态下把持弯曲部46a。由此,能够减轻驾驶员的负担。其结果是,驾驶员能够更容易地使自身的姿势稳定。
[0064]
并且,如图2所示,弯曲部46a位于操作终端12与右侧肘托42之间。详细而言,操作终端12、弯曲部46a以及右侧肘托42在直线上排列。因此,驾驶员在将右臂的肘部搭在右侧肘托42的状态下把持弯曲部46a,在操作操作终端12时,能够不向左右转动右手地对操作终端12进行操作。因此,与操作终端12、弯曲部46a以及右侧肘托42不在直线上排列的结构相比,驾驶员容易对操作终端12进行操作。并且,与操作终端12、弯曲部46a以及右侧肘托42不在直线上排列的结构相比,驾驶员能够从正在把持弯曲部46a的状态立即对操作终端12进行操作。
[0065]
接着,如图3所示,扶手46还具有在上下方向上延伸的直线部46b。直线部46b设置于扶手46的前侧的端部。因此,直线部46b包含于扶手46的前侧部分。更详细而言,直线部46b包含于弯曲部46a。直线部46b从俯视时的扶手46的前侧的端部向下方延伸。根据本实施方式,扶手46具有直线部46b,从而驾驶员能够在上下方向(高度方向)上调整把持扶手46的位置。因此,驾驶员更容易把持扶手46。
[0066]
接着,参照图4对本实施方式的作业车辆100进行说明。图4是表示从后方观察到的操作终端12的周边的图。如图4所示,操作终端12配置为与主变速杆82的上部相对于驾驶室2的地面(驾驶空间2a的底面)的高度一致。具体而言,操作终端12配置在高于转向操纵手柄6的位置。另外,操作终端12配置在与主变速杆82的上端部在上下方向上重叠的位置。
[0067]
根据本实施方式,驾驶员在操作操作终端12来指示自动行驶模式开始后,并使主变速杆82向前侧倾动时,能够不上下大幅转动视线地操作主变速杆82。
[0068]
并且,根据本实施方式,与操作终端12配置为与就座于驾驶座椅4的驾驶员的视线的高度一致的结构相比,能够减轻由驾驶员进行的对操作终端12进行操作的负担。即,在操作终端12配置为与就座于驾驶座椅4的驾驶员的视线的上下方向上的位置(相对于驾驶室2的地面的高度)一致的结构中,驾驶员需要将手抬起至比自身的肩靠上方的位置来操作操作终端12。因此,操作终端12的操作成为较大的负担。与此相对地,根据本实施方式,操作终端12配置为与主变速杆82的上部的上下方向上的位置(相对于驾驶室2的地面的高度)一致,所以驾驶员能够在比自身的肩靠下方处操作操作终端12。由此,对操作终端12的操作变得不是较大的负担。
[0069]
接着,参照图2以及图4对本实施方式的作业车辆100进一步进行说明。如图2以及图4所示,在本实施方式的作业车辆100中,操作终端12配置在相对于转向操纵手柄6而与主变速杆82侧相反的一侧。因此,与操作终端12配置在转向操纵手柄6的前方的结构相比,驾驶员容易视觉确认前方。
[0070]
另外,如图2以及图4所示,操作终端12配置在相对于转向操纵手柄6而与侧面板8侧相反的一侧。其结果是,能够减轻驾驶员的负担。即,在操作终端12配置在侧面板8侧的结
构中,驾驶员需要用左手操作各种开关81、主变速杆82以及操作终端12,驾驶员的左手的负担变大。与此相对地,根据本实施方式,操作终端12配置在与侧面板8侧相反的一侧,所以能够使驾驶员的操作的负担分散至右手以及左手。其结果是,驾驶员的负担减轻。
[0071]
另外,如图2所示,在俯视时,转向操纵手柄6配置在主变速杆82与操作终端12之间。因此,能够使主变速杆82、转向操纵手柄6以及操作终端12的操作的负担分散至左右。由此,能够使驾驶员的负担减轻。此外,如已参照图4说明的那样,操作终端12配置在高于转向操纵手柄6的位置,所以即使在主变速杆82与操作终端12之间配置转向操纵手柄6,由驾驶员进行的转向操纵手柄6的操作也不受操作终端12阻碍。
[0072]
另外,如图2以及图4所示,后视镜30配置在驾驶室2的右方,操作终端12配置在转向操纵手柄6与后视镜30之间。因此,视觉确认后视镜30时的驾驶员的视线不受操作终端12遮挡。由此,驾驶员能够可靠地视觉确认后视镜30。并且,在转向操纵手柄6与后视镜30之间配置操作终端12,从而在使视线从操作终端12向后视镜30移动时,能够不使视线大幅移动地来视觉确认后视镜30。同样地,在使视线从后视镜30向操作终端12移动时,能够不使视线大幅移动地来视觉确认操作终端12。
[0073]
接着,参照图4以及图5对本实施方式的作业车辆100进行说明。如图4所示,行驶机体101(作业车辆100)还具备支承机构5。支承机构5支承操作终端12。支承机构5支承于驾驶室2的框架22。
[0074]
图5是表示从后方观察到的操作终端12的周边的放大图。如图5所示,驾驶室2的框架22具有在上下方向上延伸的支柱28。在本实施方式中,支柱28为立柱。详细而言,支柱28是前侧窗部24b(图2)以及右侧窗部24c(图3)的立柱。支承机构5固定于支柱28。因此,支柱28经由支承机构5支承操作终端12。根据本实施方式,通过驾驶室2的支柱28支承操作终端12,所以能够稳固地支承操作终端12。
[0075]
如图5所示,支承机构5包括支承部件51和摆动机构53。支承部件51支承操作终端12。摆动机构53将支承部件51支承为摆动自如。因此,支承机构5将操作终端12支承为摆动自如。
[0076]
这里,参照图5对操作终端12进行说明。如图5所示,操作终端12具有触摸显示器121和硬键122。触摸显示器121以及硬键122构成操作终端12的操作部。驾驶员通过对触摸显示器121进行触摸操作来对操作终端12进行操作。另外,驾驶员通过按下硬键122来对操作终端12进行操作。
[0077]
接着,参照图5以及图6对支承机构5进行说明。图6是表示从前方观察到的操作终端12的周边的放大图。如图5以及图6所示,支承部件51包括第一支承部件51a、第二支承部件51b、第三支承部件51c(图6)。第一支承部件51a从下方以及后方支承操作终端12。第二支承部件51b配置在第一支承部件51a的上方,从后方以及横向支承操作终端12。第三支承部件51c配置在操作终端12的后方。第三支承部件51c在上下方向上延伸,连结第一支承部件51a和第二支承部件51b。
[0078]
接着,参照图6对摆动机构53进行说明。摆动机构53以第一旋转轴线ax1~第三旋转轴线ax3的每一个为中心轴而将支承部件51支承为摆动自如。第一旋转轴线ax1是在上下方向上延伸的假想轴。第二旋转轴线ax2是与第一旋转轴线ax1平行地延伸的假想轴,第三旋转轴线ax3是向横向延伸的假想轴。横向是与上下方向正交的方向。支承机构5具有3个旋
转轴(第一旋转轴线ax1~第三旋转轴线ax3),从而驾驶员能够使操作终端12的位置变化。
[0079]
如图6所示,摆动机构53具有第一安装部件531、臂部件532、第一轴支承部件533、第二轴支承部件534、第二安装部件535、第一轴部件536a~第三轴部件536c。
[0080]
第一安装部件531安装于支柱28。第一安装部件531将第一轴部件536a的两端支承为旋转自如。详细而言,第一轴部件536a在上下方向上延伸。第一旋转轴线ax1通过第一轴部件536a的中心。第一轴部件536a以第一旋转轴线ax1为中心轴旋转自如。
[0081]
臂部件532固定于第一轴部件536a的周面,从第一轴部件536a向第一旋转轴线ax1的径向延伸。因此,臂部件532以第一旋转轴线ax1为中心旋转。
[0082]
第一轴支承部件533固定于臂部件532的前端,从臂部件532的前端向上方向延伸。第一轴支承部件533将第二轴部件536b的两端支承为旋转自如。详细而言,第二轴部件536b在上下方向上延伸。第二旋转轴线ax2通过第二轴部件536b的中心。第二轴部件536b以第二旋转轴线ax2为中心轴旋转自如。
[0083]
第二轴支承部件534固定于第二轴部件536b的周面。因此,第二轴支承部件534以第二旋转轴线ax2为中心旋转。第二轴支承部件534将第三轴部件536c的周面支承为旋转自如。详细而言,第三轴部件536c向横向延伸。第三旋转轴线ax3通过第三轴部件536c的中心。第三轴部件536c以第三旋转轴线ax3为中心轴旋转自如。
[0084]
第二安装部件535安装于第三支承部件51c。第二安装部件535将第三轴部件536c的两端支承为旋转自如。
[0085]
此外,在本实施方式中,支承机构5具有3个旋转轴(第一旋转轴线ax1~第三旋转轴线ax3),但支承机构5也可以不具有旋转轴。或者支承机构5也可以具有1个、2个或者4个以上的旋转轴。
[0086]
接着,参照图7对本实施方式的作业车辆100进行说明。图7是表示本实施方式的作业车辆100的结构的框图。如图7所示,操作终端12还具有终端处理部123、存储部124、通信处理部125、以及通信天线126。另外,触摸显示器121具有显示部121a和触摸传感器121b。
[0087]
显示部121a由终端处理部123控制,显示各种画面。例如,显示部121a显示用于设定行驶路径sg的画面。显示部121a例如由液晶显示器或者有机el显示器这样的显示器构成。触摸传感器121b配置在显示部121a的显示面,检测驾驶员的触摸操作。触摸传感器121b例如是静电电容方式的触摸传感器。
[0088]
通信天线126收发电波(无线信号)。通信天线126包括近距离无线通信用的天线。此外,通信天线126也可以包括互联网线路用的天线。
[0089]
通信处理部125与通信天线126电连接。通信处理部125经由通信天线126在与行驶机体101之间进行数据的收发。通信处理部125例如包括近距离无线通信模块。此外,通信处理部125也可以包括遵照wi-fi(注册商标)这样的无线lan(local area network:局域网)标准的通信模块。
[0090]
存储部124存储各种计算机程序以及各种数据。存储部124例如包括半导体存储器。存储部124例如由ram(random access memory:随机存取存储器)以及rom(read only memory:只读存储器)构成。存储部124也可以还包括eeprom(注册商标)或者闪存这样的非易失性存储器。
[0091]
终端处理部123例如由cpu(central processing unit:中央处理器)或者mpu
(micro processing unit:微处理器)这样的执行各种运算的处理器构成。或者终端处理部123也可以由通用运算器构成。终端处理部123基于存储部124中存储的各种计算机程序以及各种数据,执行各种处理。
[0092]
例如,终端处理部123在自动行驶开始前,使接受开始自动行驶模式的指示的画面显示于显示部121a。而且,若通过驾驶员的触摸操作或者由驾驶员进行的对硬键122的操作,接受到开始自动行驶模式的指示,则经由通信处理部125,将许可自动行驶模式的信号发送至行驶机体101。另外,终端处理部123在自动行驶开始后,使接受自动行驶模式停止或者中断的指示的画面显示于显示部121a。而且,若通过驾驶员的触摸操作或者由驾驶员进行的对硬键122的操作,接受到自动行驶模式停止或者中断的指示,则经由通信处理部125,将使自动行驶模式停止或者中断的信号发送至行驶机体101。
[0093]
接着,对行驶机体101进行说明。如图7所示,行驶机体101(作业车辆100)还具备主体处理部401、存储部402、位置取得部403、通信处理部404、定位天线405、以及通信天线406。
[0094]
定位天线405接收来自构成卫星定位系统(global navigation satellite system;gnss)的定位卫星的电波。定位天线405还接收来自基站的电波。
[0095]
位置取得部403与定位天线405电连接。位置取得部403根据基于定位天线405所接收到的电波的定位信号,取得作业车辆100的位置作为纬度以及经度的信息。以下,有时将表示作业车辆100的位置的信息(纬度以及经度的信息)记载为“作业车辆100的当前位置数据”。
[0096]
通信天线406收发电波(无线信号)。通信天线406包括近距离无线通信用的天线。此外,通信天线406也可以包括互联网线路用的天线。
[0097]
通信处理部404与通信天线406电连接。通信处理部404经由通信天线406在与操作终端12之间进行数据的收发。通信处理部404例如包括近距离无线通信模块。此外,通信处理部404也可以包括遵照wi-fi(注册商标)这样的无线lan标准的通信模块。
[0098]
存储部402存储各种计算机程序以及各种数据。存储部402例如包括半导体存储器。存储部402例如由ram以及rom构成。存储部124也可以还包括eeprom(注册商标)或者闪存这样的非易失性存储器。
[0099]
主体处理部401例如由cpu或者mpu这样的执行各种运算的处理器构成。或者主体处理部401也可以由通用运算器构成。主体处理部401基于存储部402中存储的各种计算机程序以及各种数据,执行各种处理。
[0100]
例如,主体处理部401将作业车辆100的当前位置数据经由通信处理部404向操作终端12发送。其结果是,终端处理部123取得作业车辆100的当前位置。
[0101]
另外,主体处理部401经由通信处理部404从操作终端12接收到许可自动行驶模式的信号后,若探测到图2所示的主变速杆82向前侧倾动,则使行驶装置102驱动,开始自动行驶。具体而言,主体处理部401基于存储部402中存储的表示行驶路径sg的数据、和由位置取得部403随时取得的表示作业车辆100的位置的数据,来控制行驶装置102。其结果是,作业车辆100沿着存储部402中存储的行驶路径sg行驶。另外,主体处理部401在自动行驶开始后,若经由通信处理部404从操作终端12接收到使自动行驶模式停止或者中断的信号,则使行驶装置102的驱动停止或者中断。
[0102]
此外,终端处理部123在自动行驶开始前,制作表示行驶路径sg的数据。终端处理部123在自动行驶开始前,经由通信处理部125向行驶机体101发送表示行驶路径sg的数据。其结果是,表示行驶路径sg的数据存储于行驶机体101的存储部402。
[0103]
接着,参照图7~图12对终端处理部123以及主体处理部401所执行的处理的一个例子进行说明。图8是表示田地h的一个例子的图。图9是表示操作终端12中显示的第一画面g1的图。图10是表示操作终端12中显示的第二画面g2的图。图11是表示操作终端12中显示的第三画面g3的图。图12是表示操作终端12中显示的第四画面g4的图。
[0104]
在图8所示的例子中,田地h的外形为矩形状。如图8所示,田地h包括最外周区域h1、田头区域h2、自动模式区域h3。驾驶员首先手动地操作作业车辆100,进行收割最外周区域h1的未收割谷杆的收割作业。
[0105]
若最外周区域h1的收割作业结束,则终端处理部123基于作业车辆100的当前位置数据登记田地h的外形。具体而言,终端处理部123基于作业车辆100的当前位置数据,使表示田地h的外形的画面显示于触摸显示器121(显示部121a)。而且,根据由驾驶员进行的触摸操作或者由驾驶员进行的对硬键122的操作,登记田地h的外形。此外,终端处理部123也可以将接受用于微调田地h的外形的操作的画面显示于触摸显示器121(显示部121a)。
[0106]
田地h的外形登记完成后,终端处理部123使图9所示的第一画面g1显示于触摸显示器121(显示部121a)。如图9所示,第一画面g1显示田地h和作业车辆100的当前位置。另外,第一画面g1显示开始按钮b1。此外,第一画面g1也可以灰色显示将参照图11后文叙述的模式切换按钮b3。
[0107]
开始按钮b1是用于指示田头直行模式开始的按钮图像。田头直行模式是自动行驶模式的一个例子。在第一画面g1的显示中,若驾驶员触摸开始按钮b1并使主变速杆82向前侧倾动,则作业车辆100沿着田头区域h2进行自动行驶(直行),收割田头区域h2的未收割谷杆。
[0108]
此外,在田头直行模式下,在从某个边向下一边移动时,驾驶员操作转向操纵手柄6、主变速杆82使作业车辆100转弯。具体而言,若田头区域h2的某个边的收割作业结束,则作业车辆100停止。作业车辆100停止后,驾驶员通过手动使作业车辆100转弯,使其成为能够沿着下一边直行的姿势。之后,若驾驶员触摸开始按钮b1并使主变速杆82向前侧倾动,则作业车辆100沿着下一边进行自动行驶(直行)。
[0109]
在作业车辆100沿着田头区域h2进行自动行驶(直行)时,终端处理部123使图10所示的第二画面g2显示于触摸显示器121(显示部121a)。如图10所示,第二画面g2显示田地h和作业车辆100的当前位置。另外,第二画面g2显示停止按钮b2。停止按钮b2是用于指示田头直行模式(自动行驶模式)停止的按钮图像。在第二画面g2的显示中,若驾驶员触摸停止按钮b2,则作业车辆100停止。此外,第二画面g2也可以与第一画面g1同样地灰色显示模式切换按钮b3。
[0110]
若田头区域h2的收割作业结束,则终端处理部123使图11所示的第三画面g3显示于触摸显示器121(显示部121a)。如图11所示,第三画面g3还显示模式切换按钮b3。更详细而言,第三画面g3将模式切换按钮b3以能够选择的方式进行显示。模式切换按钮b3是用于将作业车辆100的模式从田头直行模式切换为自动模式的按钮图像。自动模式是自动行驶模式的一个例子。自动模式是作业车辆100在自动模式区域h3内进行自动行驶的模式。在自
动模式下,与田头直行模式不同,作业车辆100自动地转弯。
[0111]
若驾驶员触摸模式切换按钮b3,则终端处理部123使各种设定画面依次显示于触摸显示器121(显示部121a)。各种设定画面是设定用于在自动模式区域h3内进行收割作业的各种条件的画面。例如,终端处理部123使设定作业方向的画面、对往复收割或者环绕收割进行选择的画面依次显示于触摸显示器121(显示部121a)。终端处理部123在由驾驶员选择了往复收割的情况下,也可以进一步使用于设定中割的画面显示于触摸显示器121(显示部121a)。驾驶员通过触摸操作或者对硬键122的操作来设定各种条件。若各种条件的设定完成,则终端处理部123基于各种条件制作行驶路径sg。
[0112]
终端处理部123若制作出行驶路径sg,则使图12所示的第四画面g4显示于触摸显示器121(显示部121a)。如图12所示,第四画面g4显示自动模式区域h3、已制作的行驶路径sg、作业车辆100的当前位置。第四画面g4还显示行驶路径sg的开始位置s以及目标位置g。
[0113]
在第四画面g4显示中,驾驶员通过手动操作使作业车辆100移动到开始位置s。若作业车辆100移动到开始位置s,则终端处理部123将开始按钮b1以能够选择的方式进行显示。在开始按钮b1变为能够选择后,若驾驶员触摸开始按钮b1并使主变速杆82向前侧倾动,则作业车辆100沿着行驶路径sg进行自动行驶,收割自动模式区域h3的未收割谷杆。
[0114]
以上,参照附图(图1~图12)对本发明的实施方式进行了说明。但是,本发明并不局限于上述实施方式,能够在不脱离其主旨的范围内在各种形态中实施。另外,上述实施方式所公开的多个构成要素能够适当地改变。例如,也可以向其他实施方式的构成要素追加某个实施方式所示的全构成要素中的某个构成要素,或者也可以从实施方式删除某个实施方式所示的全构成要素中的若干构成要素。
[0115]
为了使发明容易理解,附图以各个结构要素为主体示意性地进行了表示,为了附图制作的方便,存在图示的各结构要素的厚度、长度、个数、间隔等与实际不同的情况。另外,无需赘述,上述实施方式中示出的各结构要素的结构是一个例子,并不特别限定,能够在不从本发明的效果实质地脱离的范围内进行各种变更。
[0116]
例如,在已参照图1~图12说明的实施方式中,操作终端12为平板终端,但操作终端12并不限定于平板终端。操作终端12只要是接受由驾驶员进行的操作的电子设备即可。例如,操作终端12也可以是智能手机。
[0117]
另外,在已参照图1~图12说明的实施方式中,操作终端12在与行驶机体101之间进行无线通信,但操作终端12也可以在与行驶机体101之间进行有线通信。
[0118]
另外,在已参照图1~图12说明的实施方式中,作业车辆100是联合收割机,但作业车辆100并不限定于联合收割机。作业车辆100只要是执行既定作业的车辆即可。例如,作业车辆100也可以是拖拉机或者插秧机这样的除联合收割机以外的农业机械,也可以建筑机械。
[0119]
本发明对具有自动行驶模式的作业车辆有用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1