沙漠植树机器人
1.本发明涉及沙漠植树技术领域,具体涉及沙漠植树机器人。
背景技术:
2.沙漠绿化,狭义上讲,即在沙漠地带栽种适宜的树木及各种植物;广义上讲,即指对沙漠资源的科学开发和利用。
3.沙漠绿化具有如下多个意义:1、抵挡风沙,防止沙漠的扩张,通过在沙漠里种树,这些种下的树能够固住松散的沙粒,削弱沙漠地区的风力,阻止沙漠扩张;2、保持水土,干旱和半干旱地区本身有着水资源缺乏、刮风多的特征,再加上人们对土地的破坏,使得可耕种的土地慢慢地也变成了沙漠化的土地;3、产生经济效益,在沙漠的土地上可以种植树木来带来经济效益,一方面,在沙漠里种植经济类林木可以为当地创造大量的劳动和就业机会,另一方面,通过树木的种植,可以保护沙漠中的公路。
4.植树是沙漠绿化的重要手段之一,传统植树需要人们完成挖坑、放树苗、埋土和浇水等步骤,不仅耗时也还耗力;同时目前出现在市场可购买到的植树机器人仅仅拥有钻土的功能,需要人为配合埋土,工作效率不高,对于人力的节省也有限,造成了种植效率低下和操作工人劳动量大的问题。
技术实现要素:
5.本发明的目的是为了克服现有技术中的问题,提供沙漠植树机器人。
6.本发明提供了沙漠植树机器人,包括:车架、挖坑装置和送树填土装置,车架固定设有水平移动结构,水平移动结构包括能够左右移动的移动板;挖坑装置包括上下移动结构、第一电机、挖坑钻头,所述上下移动结构的固定端固定连接移动板的一端,上下移动结构的移动端固定连接第一电机,第一电机的输出轴固定连接挖坑钻头;送树填土装置包括筒体、电动推杆、滑套、多个推土板和多个连杆,所述筒体固定连接移动板的另一端,筒体的外部套设有滑套,滑套的端面固定连接电动推杆的一端,电动推杆的另一端固定连接筒体的外壁,滑套的外周固定连接多个连杆的一端,各连杆的另一端均对应铰接一个推土板的板面,且各推土板的一边铰接在筒体下端的周向边缘。
7.较佳地,所述水平移动结构还包括第二电机、第一丝杠、螺母、滑块和滑轨,所述第二电机固定在车架上,第二电机的输出轴固定连接水平设置的第一丝杠,第一丝杠啮合螺母,螺母固定连接滑块,滑块滑动连接滑轨,滑轨固定在车架上,同时滑块固定连接所述移动板。
8.较佳地,所述上下移动结构包括第三电机、第二丝杠、u形板、螺母块,所述第三电机固定在u形板一侧壁上,u形板底壁外侧固定连接所述移动板,第三电机的输出轴固定连接第二丝杠的一端,第二丝杠的另一端转动连接在u形板的另一侧壁,第二丝杠啮合螺母块,螺母块的一面抵接u形板的底壁内侧,螺母块的另一面固定连接所述第一电机。
9.较佳地,所述的沙漠植树机器人还包括浇水装置,所述浇水装置包括水桶、电磁阀
和水管,所述水桶连通水管,水管上设置有控制水流通断的电磁阀,水管的出水口朝向车架底部,水管固定在车架上。
10.较佳地,所述各连杆均包括第一连杆和第二连杆,所述第一连杆的一端固定连接滑套,第一连杆的另一端铰接第二连杆的一端,第二连杆的另一端铰接推土板的板面。
11.较佳地,所述的沙漠植树机器人还包括传送树苗结构,所述传送树苗结构包括第一链轮、第二链轮、第四电机、链条和多个下部设有开口的放置框,所述第四电机固定在车架的顶部,第四电机的输出轴固定连接第一链轮,第一链轮通过链条连接第二链轮,第二链轮转动设置在车架的顶部,所述链条的外周固定连接多个用于放置树苗的放置框,车架的顶部设有顶板,顶板上设有竖孔,所述竖孔位于其中一个放置框的正下方。
12.较佳地,所述车架的底部设置有动力轮。
13.较佳地,所述车架选用铝合金型材。
14.与现有技术相比,本发明的有益效果是:本发明的沙漠植树机器人能够通过控制器控制水平移动结构将移动板移动到右侧位置,然后控制器控制上下移动结构向下移动,同时第一电机带动挖坑钻头旋转,在地面挖出树坑后上下移动结构向上移动,同时第一电机停止转动;控制器控制移动板移动到左侧位置,筒体位于树坑的正上方,然后传送树苗结构将单个树苗放置到筒体内,树苗顺着筒体落入树坑内,接着电动推杆伸长,推动滑套下移,滑套上固定连接的多个连杆推动各个推土板互相聚拢,将树坑附近的沙子推到树根上并掩埋树根,电动推杆收缩复位。本发明的沙漠植树机器人避免了人力一个一个在沙漠中种树,不仅耗时也还耗力的问题。本发明的沙漠植树机器人能够自动挖坑和埋土,避免了人力进行挖坑和埋土的工作,提高了工作效率,减少了人的工作量。
附图说明
15.图1为本发明的主视图;
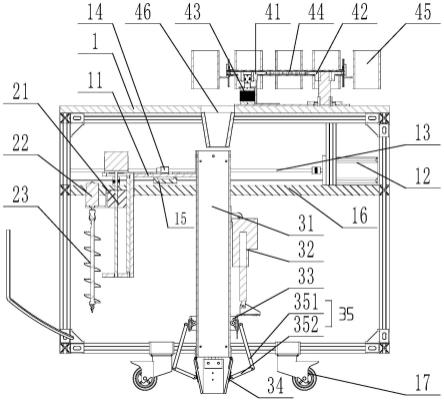
16.图2为本发明的剖视图;
17.图3为本发明的图2中的上下移动结构局部放大图;
18.图4为本发明的立体图。
19.附图标记说明:
20.1.车架,11.移动板,12.第二电机,13.第一丝杠,14.螺母,15.滑块,16.滑轨,17.动力轮,2.挖坑结构,21.上下移动结构,211.第三电机,212.第二丝杠,213.u形板,214.螺母块,22.第一电机,23.挖坑钻头,3.送树填土装置,31.筒体,32.电动推杆,33.滑套,34.推土板,35.连杆,351.第一连杆,352.第二连杆,4.传送树苗结构,41.第一链轮,42.第二链轮,43.第四电机,44.链条,45.放置框,46.竖孔,51.水桶,52.电磁阀,53.水管。
具体实施方式
21.下面对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.本发明提供的沙漠植树机器人,如图1-4包括:车架1、挖坑装置2和送树填土装置3,车架1固定设有水平移动结构,水平移动结构包括能够左右移动的移动板11;挖坑装置2
包括上下移动结构21、第一电机22、挖坑钻头23,所述上下移动结构21的固定端固定连接移动板11的一端,上下移动结构21的移动端固定连接第一电机22,第一电机22的输出轴固定连接挖坑钻头23;送树填土装置3包括筒体31、电动推杆32、滑套33、多个推土板34和多个连杆35,所述筒体31固定连接移动板11的另一端,筒体31的外部套设有滑套33,滑套33的端面固定连接电动推杆32的一端,电动推杆32的另一端固定连接筒体31的外壁,滑套33的外周固定连接多个连杆35的一端,各连杆35的另一端均对应铰接一个推土板34的板面,且各推土板34的一边铰接在筒体31下端的周向边缘。
23.控制器控制水平移动结构将移动板11移动到右侧位置,然后控制器控制上下移动结构21向下移动,同时第一电机22带动挖坑钻头23旋转,在地面挖出树坑后上下移动结构21向上移动,同时第一电机22停止转动;控制器控制移动板11移动到左侧位置,筒体31位于树坑的正上方,然后传送树苗结构4将单个树苗放置到筒体31内,树苗顺着筒体31落入树坑内,接着电动推杆32伸长,推动滑套33下移,滑套33上固定连接的多个连杆35推动各个推土板34互相聚拢,将树坑附近的沙子推到树根上并掩埋树根,电动推杆32收缩复位。本发明的沙漠植树机器人能够自动挖坑和埋土,避免了人力进行挖坑和埋土的工作,提高了工作效率,减少了人的工作量。
24.优选地,如图2所述水平移动结构还包括第二电机12、第一丝杠13、螺母14、滑块15和滑轨16,所述第二电机12固定在车架1上,第二电机12的输出轴固定连接水平设置的第一丝杠13,第一丝杠13啮合螺母14,螺母14固定连接滑块15,滑块15滑动连接滑轨16,滑轨16固定在车架1上,同时滑块15固定连接所述移动板11。
25.控制器控制第二电机12正转,螺母14带动滑块15在滑轨16上向左移动,第二电机12反转,则螺母14带动滑块15在滑轨16上向右移动。
26.优选地,如图3所述上下移动结构21包括第三电机211、第二丝杠212、u形板213、螺母块214,所述第三电机211固定在u形板213一侧壁上,u形板213底壁外侧固定连接所述移动板11,第三电机211的输出轴固定连接第二丝杠212的一端,第二丝杠212的另一端转动连接在u形板213的另一侧壁,第二丝杠212啮合螺母块214,螺母块214的一面抵接u形板213的底壁内侧,螺母块214的另一面固定连接所述第一电机22。
27.控制器控制第三电机211正转,第二丝杠212带动螺母块214沿u形板213的底壁移动,由于螺母块214的一面抵接u形板213的底壁内侧,因此u形板213的底壁能够限制螺母块214转动。
28.优选地,如图1所述的沙漠植树机器人还包括浇水装置,所述浇水装置包括水桶51、电磁阀52和水管53,所述水桶51连通水管53,水管53上设置有控制水流通断的电磁阀52,水管53的出水口朝向车架1底部,水管53固定在车架1上。
29.控制器控制电磁阀52的通断,实现水是否流出水管53,水管53的出水口用于给已经埋土的树坑里浇水。
30.优选地,如图2所述各连杆35均包括第一连杆351和第二连杆352,所述第一连杆351的一端固定连接滑套33,第一连杆351的另一端铰接第二连杆352的一端,第二连杆352的另一端铰接推土板34的板面。
31.目的在于增加土板34的开和角度,防止推土板34卡死。
32.优选地,如图2所述的沙漠植树机器人还包括传送树苗结构4,所述传送树苗结构4
包括第一链轮41、第二链轮42、第四电机43、链条44和多个下部设有开口的放置框45,所述第四电机43固定在车架1的顶部,第四电机43的输出轴固定连接第一链轮41,第一链轮41通过链条44连接第二链轮42,第二链轮42转动设置在车架1的顶部,所述链条44的外周固定连接多个用于放置树苗的放置框45,车架1的顶部设有顶板,顶板上设有竖孔46,所述竖孔46位于其中一个放置框45的正下方。
33.每个放置框45均放置一个树苗,当控制器控制第四电机43带动第一链轮41转动后,链条44牵引多个放置框45转动,当一个放置框45移动到竖孔46上方时,对应的树苗从竖孔46内通过筒体31落入树坑内。
34.优选地,所述车架1的底部设置有动力轮17。
35.优选地,所述车架1选用铝合金型材。
36.本发明的沙漠植树机器人的使用方法如下:
37.首先,将车架1移动到种树的区域,在每个放置框45均放置一个树苗,水桶内装满水;然后,控制器控制第二电机12正转,移动板11带动u形板213和筒体31均移动到右侧,控制器控制第一电机22和第三电机211同时转动,挖坑钻头23挖好树坑后,第一电机22停止转动,第三电机211复位;接着,控制器控制第二电机12反转,移动板11带动u形板213和筒体31均移动到左侧,筒体31位于树坑的正上方,控制器控制第四电机43转动特定角度,一个树苗通过竖孔46顺着筒体31落入树坑内;最后,控制器控制电动推杆32伸长,推动滑套33下移,滑套33上固定连接的多个连杆35推动各个推土板34互相聚拢,将树坑附近的沙子推到树根上并掩埋树根,电动推杆32收缩复位,动力轮17带动车架1前进特定的距离后停止,控制器控制电磁阀52打开10秒后关闭,水从水管53流到树根处,一棵树苗完成栽种。
38.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1