一种智能化蔬菜叶面肥定点喷洒设备
1.本发明涉及一种喷洒设备,尤其涉及一种智能化蔬菜叶面肥定点喷洒设备。
背景技术:
2.在蔬菜种植的过程中,为了使蔬菜生长的更加旺盛,人们会对蔬菜喷洒叶面肥,人们通常使用喷洒设备对蔬菜喷洒叶面肥,但是现有的喷洒设备在使用时采用的是喷管旋转式喷洒,这样就容易使得喷洒不均,造成部分蔬菜缺少营养元素,所以,需要设计一种喷洒设备。
3.专利申请:cn213548368u,公开日为20210629,公开了一种可移动的蔬菜肥料喷淋设备,通过包括底座,所述底座的顶部固定安装有储水箱,且底座的底部四角均开设有活动槽,活动槽内均活动安装有固定杆,四个固定杆的一端均固定安装有万向轮,所述储水箱的一侧螺纹安装有喷头,另一侧固定安装有固定横杆,活动杆的两端均延伸至通孔外且一端固定安装有位于固定横杆上方的齿条,另一端固定安装有拉杆,所述储水箱与固定横杆相邻的两侧均固定安装有第一固定块,该喷淋设备通过喷头对蔬菜喷淋肥料,但喷淋设备在使用时需要多次通过人们手动转动部件进行喷洒效果,这样就使得操作繁琐,同时耗费了人力。
4.我们设计了一种操作简单的智能化蔬菜叶面肥定点喷洒设备,以达到克服现有的喷淋设备在使用时操作繁琐耗费人力的效果。
技术实现要素:
5.针对现有技术的不足,本发明提供一种操作简单的智能化蔬菜叶面肥定点喷洒设备,以克服现有的喷淋设备在使用时操作繁琐耗费人力的缺点。
6.为实现以上目的,本发明通过以下方案予以实现:一种智能化蔬菜叶面肥定点喷洒设备,包括有:
7.安装板架和防护外壳,安装板架上部左右两侧均连接有防护外壳;
8.导向轮,安装板架下部左右两侧均转动式连接有两个导向轮;
9.喷洒器,安装板架内上侧安装有喷洒器,喷洒器启动将液态的叶面肥喷洒在蔬菜上;
10.液泵,喷洒器内左右两侧均安装有液泵;
11.蔬菜识别机构,安装板架前部上侧设有蔬菜识别机构,蔬菜识别机构用于对蔬菜竖向之间的距离进行扫描;
12.定位机构,安装板架与喷洒器之间设有定位机构,定位机构用于调节喷洒器下端的位置。
13.作为上述方案的改进,蔬菜识别机构包括有:
14.第一支撑架,安装板架前部上侧连接有两个第一支撑架;
15.控制器,两个第一支撑架之间安装有控制器,控制器与液泵通过电性连接;
16.扫描器,两个第一支撑架下侧均安装有扫描器,控制器与扫描器通过电性连接,扫描器移动对蔬菜竖向之间的距离进行扫描。
17.作为上述方案的改进,定位机构包括有:
18.电动导轨,安装板架前后两部均安装有电动导轨;
19.滑块,电动导轨上安装有两个滑块;
20.第一连接块,滑块上均连接有第一连接块,第一连接块与喷洒器连接。
21.作为上述方案的改进,还包括有用于实现自动移动的位移机构,位移机构包括有:
22.电机架,安装板架后部上侧连接有两个电机架;
23.伺服电机,两个电机架后部均安装有伺服电机;
24.转轴,安装板架下侧转动式连接有两个转轴;
25.滚轮,两个转轴上均连接有滚轮;
26.传动皮带,左侧的转轴与左侧伺服电机的输出轴上绕有传动皮带,右侧的转轴与右侧伺服电机的输出轴上绕有传动皮带。
27.作为上述方案的改进,还包括有用于搅拌叶面肥和清水的液体活性保持机构,液体活性保持机构包括有:
28.电动推杆,喷洒器前后两部均安装有电动推杆;
29.第二连接块,两个电动推杆的伸缩杆上均连接有第二连接块,两个第二连接块均与喷洒器滑动式连接;
30.搅杆,两个第二连接块内侧均连接有搅杆,两个搅杆均与喷洒器滑动式连接,搅杆移动对叶面肥和清水进行搅拌。
31.作为上述方案的改进,还包括有用于实现自动搅拌的触发机构,触发机构包括有:
32.顶块,右侧的滚轮左部均匀连接有顶块;
33.第二支撑架,安装板架前部右侧连接有第二支撑架;
34.开关,第二支撑架内顶部安装有开关,开关与电动推杆通过电性连接;
35.顶杆,第二支撑架下部滑动式连接有顶杆;
36.顶架,顶杆底部连接有顶架;
37.弹簧,顶架与第二支撑架之间连接有弹簧,弹簧绕在顶杆下侧。
38.作为上述方案的改进,还包括有用于提示人们的提醒机构,提醒机构包括有:
39.提示壳体,喷洒器顶部左侧连接有提示壳体;
40.指示块,提示壳体内滑动式连接有指示块;
41.连接杆,指示块上连接有连接杆,连接杆与喷洒器滑动式连接,连接杆穿过喷洒器;
42.浮块,连接杆底部连接有浮块。
43.作为上述方案的改进,伺服电机通过螺栓固接在电机架后部。
44.本发明的优点在于:1、本发明通过推动安装板架使得扫描器对蔬菜之间的竖向距离进行扫描,随后人们继续推动安装板架,使得控制器控制液泵启动,从而使得喷洒器将液态的叶面肥喷洒在蔬菜上,以此实现了喷洒的效果,操作简单;
45.2、通过人们启动伺服电机,使得伺服电机的输出轴转动带动传动皮带转动,从而使得转轴和滚轮转动,使得安装板架移动,以此实现了自动移动的效果,节省了人力;
46.3、通过顶杆向上移动与开关接触,使得电动推杆的伸缩杆向外侧移动带动搅杆向外侧移动,随后电动推杆的伸缩杆向内侧移动带动搅杆向内侧移动,通过搅杆移动对叶面肥和清水进行搅拌,避免了叶面肥沉淀。
附图说明
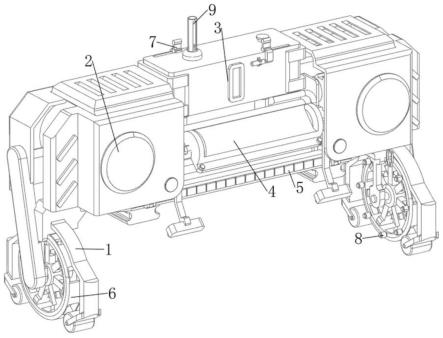
47.图1为本发明的立体结构示意图。
48.图2为本发明的第一种部分立体结构示意图。
49.图3为本发明的第二种部分立体结构示意图。
50.图4为本发明的第三种部分立体结构示意图。
51.图5为本发明的第四种部分立体结构示意图。
52.图6为本发明的蔬菜识别机构第一种部分立体结构示意图。
53.图7为本发明的蔬菜识别机构第二种部分立体结构示意图。
54.图8为本发明的定位机构第一种部分立体结构示意图。
55.图9为本发明的定位机构第二种部分立体结构示意图。
56.图10为本发明的定位机构第三种部分立体结构示意图。
57.图11为本发明的位移机构立体结构示意图。
58.图12为本发明的液体活性保持机构第一种部分立体结构示意图。
59.图13为本发明的液体活性保持机构第二种部分立体结构示意图。
60.图14为本发明的液体活性保持机构第三种部分立体结构示意图。
61.图15为本发明的触发机构第一种部分立体结构示意图。
62.图16为本发明的触发机构第二种部分立体结构示意图。
63.图17为本发明的触发机构第三种部分立体结构示意图。
64.图18为本发明的提醒机构第一种部分立体结构示意图。
65.图19为本发明的提醒机构第二种部分立体结构示意图。
66.图中附图标记的含义:1:安装板架,11:导向轮,2:防护外壳,3:喷洒器,31:液泵,4:蔬菜识别机构,41:第一支撑架,42:扫描器,43:控制器,5:定位机构,51:电动导轨,52:滑块,53:第一连接块,6:位移机构,61:伺服电机,62:电机架,63:传动皮带,64:转轴,65:滚轮,7:液体活性保持机构,71:搅杆,72:电动推杆,73:第二连接块,8:触发机构,81:顶块,82:第二支撑架,83:开关,84:顶杆,85:顶架,86:弹簧,9:提醒机构,91:提示壳体,92:连接杆,93:浮块,94:指示块。
具体实施方式
67.下面,结合附图以及具体实施方式,对本发明做进一步描述:
68.实施例1
69.一种智能化蔬菜叶面肥定点喷洒设备,现参考图1-图5,包括有安装板架1、导向轮11,防护外壳2、喷洒器3、液泵31、蔬菜识别机构4和定位机构5,安装板架1上部左右两侧均焊接有防护外壳2,安装板架1下部左右两侧均转动式连接有两个导向轮11,导向轮11有四个,安装板架1内上侧安装有喷洒器3,喷洒器3内左右两侧均安装有液泵31,安装板架1前部上侧设有蔬菜识别机构4,安装板架1与喷洒器3之间设有定位机构5。
70.现参考图1、图5、图6和图7,蔬菜识别机构4包括有第一支撑架41、扫描器42和控制器43,安装板架1前部上侧焊接有两个第一支撑架41,两个第一支撑架41之间安装有控制器43,控制器43与液泵31通过电性连接,两个第一支撑架41下侧均安装有扫描器42,控制器43与扫描器42通过电性连接。
71.现参考图1、图8、图9和图10,定位机构5包括有电动导轨51、滑块52和第一连接块53,安装板架1前后两部均通过螺栓固接有电动导轨51,电动导轨51上安装有两个滑块52,滑块52有四个,滑块52上均连接有第一连接块53,第一连接块53有四个,第一连接块53与喷洒器3连接。
72.当人们需要对蔬菜叶面喷洒肥料时,人们可使用这种智能化蔬菜叶面肥定点喷洒设备,首先人们将适量的叶面肥和清水注入至喷洒器3内,注入完成后,人们推动安装板架1,使得本智能化蔬菜叶面肥定点喷洒设备移动,从而使得导向轮11在地面上滚动,当本智能化蔬菜叶面肥定点喷洒设备被推动至菜地时,人们可启动电动导轨51,电动导轨51带动滑块52移动,使得第一连接块53移动,从而使得喷洒器3下端移动,当喷洒器3下端移动至合适位置时,人们可关闭电动导轨51,使得喷洒器3下端与蔬菜对齐,随后人们启动扫描器42和控制器43,并继续推动安装板架1,使得导向轮11继续转动,同时扫描器42对每两株蔬菜竖向之间的距离进行扫描,并将蔬菜之间距离的数据传入至控制器43内,当扫描完成后,人们继续推动安装板架1,使得导向轮11继续在地面上滚动,当人们将本智能化蔬菜叶面肥定点喷洒设备推动至原位时,人们启动喷洒器3,并按上述步骤继续推动安装板架1,使得本智能化蔬菜叶面肥定点喷洒设备在菜地里移动,导向轮11在地面上滚动,当喷洒器3被移动至蔬菜正上方时,控制器43控制液泵31启动,使得喷洒器3将液态的叶面肥喷洒在蔬菜叶面上,当喷洒器3远离蔬菜时,控制器43控制液泵31关闭,以此实现了智能化定点喷洒的效果,当喷洒完成时,人们可关闭扫描器42、控制器43和喷洒器3,然后人们将本智能化蔬菜叶面肥定点喷洒设备推动至合适位置即可。
73.实施例2
74.在实施例1的基础之上,现参考图1、图5和图11,还包括有位移机构6,位移机构6包括有伺服电机61、电机架62、传动皮带63、转轴64和滚轮65,安装板架1后部上侧连接有两个电机架62,两个电机架62后部均螺栓固接有伺服电机61,安装板架1下侧转动式连接有两个转轴64,两个转轴64上均连接有滚轮65,左侧的转轴64与左侧伺服电机61的输出轴上绕有传动皮带63,右侧的转轴64与右侧伺服电机61的输出轴上绕有传动皮带63。
75.现参考图1、图5、图12、图13和图14,还包括有液体活性保持机构7,液体活性保持机构7包括有搅杆71、电动推杆72和第二连接块73,喷洒器3前后两部均螺栓固接有电动推杆72,两个电动推杆72的伸缩杆上均连接有第二连接块73,两个第二连接块73均与喷洒器3滑动式连接,两个第二连接块73内侧均焊接有搅杆71,两个搅杆71均与喷洒器3滑动式连接。
76.现参考图1、图5、图15、图16和图17,还包括有触发机构8,触发机构8包括有顶块81、第二支撑架82、开关83、顶杆84、顶架85和弹簧86,右侧的滚轮65左部均匀焊接有六个顶块81,安装板架1前部右侧连接有第二支撑架82,第二支撑架82内顶部安装有开关83,开关83与电动推杆72通过电性连接,第二支撑架82下部滑动式连接有顶杆84,顶杆84移动后与开关83接触,顶杆84底部连接有顶架85,顶块81转动后与顶架85接触,顶架85与第二支撑架
82之间连接有弹簧86,弹簧86绕在顶杆84下侧。
77.现参考图1、图5、图18和图19,还包括有提醒机构9,提醒机构9包括有提示壳体91、连接杆92、浮块93和指示块94,喷洒器3顶部左侧连接有提示壳体91,提示壳体91内滑动式连接有指示块94,指示块94上连接有连接杆92,连接杆92与喷洒器3滑动式连接,连接杆92穿过喷洒器3,连接杆92底部焊接有浮块93。
78.当人们需要移动本智能化蔬菜叶面肥定点喷洒设备时,人们可启动伺服电机61,伺服电机61的输出轴转动带动传动皮带63转动,从而使得转轴64转动,使得滚轮65转动,导向轮11转动,以此实现了自动移动的效果,节省了人力,当不需要移动时,人们可关闭伺服电机61。
79.当人们需要对喷洒器3内的叶面肥和清水进行搅拌时,人们可启动电动推杆72,电动推杆72的伸缩杆向外侧伸长带动第二连接块73向外侧移动,使得搅杆71向外侧移动,当搅杆71向外侧移动至合适位置时,人们可控制电动推杆72的伸缩杆向内侧缩短,使得第二连接块73向内侧移动,从而使得搅杆71向内侧移动,当搅杆71向内侧移动至合适位置时,人们可控制电动推杆72的伸缩杆向外侧伸长,如此往复,通过搅杆71移动对喷洒器3内的叶面肥和清水进行搅拌,避免了叶面肥沉淀影响施肥效果,当不需要搅拌时,人们在电动推杆72的伸缩杆向内侧缩短至合适位置时关闭电动推杆72即可。
80.右侧的滚轮65转动带动顶块81转动,当顶块81转动与顶架85接触时,顶块81带动顶架85向上移动,从而使得顶杆84向上移动,使得弹簧86被压缩,当顶杆84向上移动与开关83接触时,电动推杆72启动,使得电动推杆72的伸缩杆向外侧伸长,从而使得搅杆71向外侧移动,当搅杆71向外侧移动至合适位置时,电动推杆72伸缩杆向内侧缩短,使得搅杆71向内侧移动,当电动推杆72伸缩杆向内侧缩短至合适位置时,电动推杆72关闭,当顶块81转动远离顶架85时,弹簧86复位带动顶架85向下移动,从而使得顶杆84向下移动远离开关83,当顶块81转动与顶架85接触时,按上述步骤电动推杆72再次启动,由于顶块81有六个,如此实现了持续性搅拌的效果。
81.当人们将叶面肥和清水注入至喷洒器3内后,清水与浮块93接触,使得浮块93向上移动,从而使得连接杆92向上移动,使得指示块94向上移动,当指示块94向上移动至合适位置时,人们可停止注入叶面肥和清水,当喷洒器3将液态的叶面肥喷洒至蔬菜叶面上时,喷洒器3内的液态的叶面肥会减少,使得浮块93适应性向下移动,从而使得连接杆92和指示块94向下移动,当指示块94向下移动至提示壳体91内最下部时,人们可了解到液态的叶面肥余量不足,以此实现了提示的效果,方便人们及时添加肥料。
82.对本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及形变,而所有的这些改变以及形变都应该属于本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1