一种可移动门架式植物表型平台及其精确作业管理方法
1.本发明属于机械工程领域,具体是一种可移动门架式植物表型平台及其精确作业管理方法,本发明适用于对不同种类、不同形态植物进行多种群体表型信息监测及浇水、施肥和喷药等栽培精确作业管理。
背景技术:
2.植物表型是指通过基因(内部条件)和环境(外部条件)共同影响所形成的形态结构、生理生化特征,可反映出植物在细胞
→
单株
→
群体水平上的结构、功能、生长发育状况及过程,能够量化分析植物基因与生长环境之间的互作效应。
3.在传统的植物表型信息获取中,通常是利用具有破坏性、主观性以及误差较大的手工测量来完成,传统测量方法很难连续、动态且多样的获取植物的表型信息。随着基因组学研究水平的不断深入及数字化、精准化农林的持续发展,传统表型测量方法已无法满足要求,因此,现代成像技术发展起来并广泛运用到植物表型信息获取领域中。利用现代成像技术获取植物表型信息,是研究植物基因特性、生长过程及所受胁迫状态的重要途径。
4.获取植物的叶片颜色、叶片数量等表型信息并通过数据分析可量化植物的基因特性、生长情况及所受胁迫状态,为植物培育及时作出浇水、施肥、喷药等调控管理措施提供依据。同时,不同种类、不同形态的植物具有不同的株高、冠幅等形态结构表型信息,针对不同种类、不同形态的植物若采用统一的喷施结构,则会出现漏喷、少喷、喷施不均及重复喷等现象,因此,可通过获取植物的株高、冠幅等形态结构表型信息,继而识别植物类型,调整变换合适的喷施结构,以保证水、化肥和农药的最大利用率。
5.农药、化肥等农用化学品的使用在确保植物健康生长、实现增产丰收、促进农林持续高速发展中起着重要作用,其精确、高效、安全的使用不仅关系着农林生产的成本问题,也关系着减少环境污染、维护生态平衡。滥用农药、化肥会破坏林间有益生物群体(动物、植物、微生物),导致生物多样性损失、病虫害抗药性增强、新害虫的不断出现、土壤肥力衰退、有机质减少、理化性质恶化等。
6.当前已经进行了相关的基于机器视觉、基于地图等技术的农药、化肥的精确使用,但是这些技术较多的是宏观的实现“靶标出现时喷药”,还没有以靶标株高、冠幅、叶片颜色、叶片数量等形态结构表型信息体现出病虫害发生或营养缺失等情况进行研究,和喷药、施肥过程中作业管理的时间、地点、数量的准确决策存在脱节,亟需结合表型监测技术,根据成像传感器采集的植物的表型信息变化,如实时地、动态地、微观地掌握植物的生长发育状况,从而制定作业管理措施,实现在合适的时间、合适的地点、施用合适的量的水、化肥和农药。
7.常用的植物表型平台有台式、车载式、门架式、传送带式、无人机式及悬索式等,其中台式和传送带式只能用于室内环境,且台式一般只能用于单株植物,通量小;车载式对于植物的种植间距有特定要求,要求行距达到一定标准;无人机式和悬索式多用于田间环境,其中悬索式控制难度较高;综上可见,门架式植物平台在通量、普适性、准确度及控制方面
都有较大优势。
8.目前,常用的植物表型平台都只能实现对植物表型信息进行获取分析或根据所获取的植物表型信息采用单一功能的作业管理,主要存在以下问题:(1)不能根据基于表型信息所得到的某一植物生长情况、所受生物及非生物胁迫状态而作出及时、精准的管理调控措施;(2)针对不同株高、不同冠幅、不同叶片颜色、不同叶片数量等植物的形态结构表型信息存在适应性差、针对性不强、喷施效率低等缺点。
技术实现要素:
9.本发明所要解决的技术问题是针对上述现有技术的不足提供一种可移动门架式植物表型平台及其精确作业管理方法,本可移动门架式植物表型平台及其精确作业管理方法的表型监测模块能够获取群体植物图像,控制箱通过图像处理和分析可得到植物表型信息,并控制精确作业管理模块针对不同类型的植物调整变换喷施结构,进行浇水、施肥和喷药等栽培作业措施的精准调控管理,适应性和针对性强,喷施效率高。
10.为实现上述技术目的,本发明采取的技术方案为:一种可移动门架式植物表型平台,包括可移动门架、控制箱、表型监测模块和精确作业管理模块,所述控制箱、表型监测模块和精确作业管理模块均安装在可移动门架上;所述精确作业管理模块包括供液箱、供液管道、泵机和喷施结构,所述供液箱通过泵机和供液管道与喷施结构连接;所述喷施结构包括伸缩驱动机构、旋转驱动机构、供液软管、多根喷液杆、调节阀和喷头,每根喷液杆的顶端均通过供液软管与供液管道连接,所述伸缩驱动机构与一根喷液杆连接且用于驱动喷液杆上下移动,所述旋转驱动机构与另一根喷液杆连接且用于驱动另一根喷液杆旋转;每根喷液杆的底端均通过调节阀连接多个喷头;所述泵机、表型监测模块、伸缩驱动机构、旋转驱动机构和调节阀均与控制箱电连接;所述表型监测模块用于采集植物群体的图像,控制箱用于处理和分析图像并分别控制伸缩驱动机构、旋转驱动机构、泵机和调节阀工作。
11.作为本发明进一步改进的技术方案,所述可移动门架包括横向型材和竖向型材,多根横向型材相互连接组合成方形框架,方形框架的四个拐角处垂直固定连接有竖向型材,每根竖向型材的底端均设置有车轮。
12.作为本发明进一步改进的技术方案,所述横向型材的正下方固定连接有顶部安装板,所述表型监测模块连接在顶部安装板前端的中间部分,所述表型监测模块包括第一电动推杆、伸缩连杆机构、传感器连接件和成像传感器,所述第一电动推杆连接在顶部安装板上部,伸缩连杆机构上端的一根连杆与第一电动推杆的端部连接,伸缩连杆机构上端的另一根连杆连接在顶部安装板下部,伸缩连杆机构下端通过传感器连接件与成像传感器相连,所述第一电动推杆用于带动伸缩连杆机构的伸长与缩短,进而实现成像传感器在高度上的调节。
13.作为本发明进一步改进的技术方案,所述伸缩连杆机构采用剪叉式伸缩连杆结构,所述顶部安装板上开设有条形槽,所述第一电动推杆的端部通过位于条形槽内侧的连接杆与剪叉式伸缩连杆结构上端的一根连杆转动连接,剪叉式伸缩连杆结构上端的另一根
连杆通过连接件与顶部安装板下部转动连接。
14.作为本发明进一步改进的技术方案,所述供液管道包括液体输送管和供液横杆,所述供液箱有三个,三个供液箱并排设置在横向型材上,位于中间的供液箱通过方钢连接在横向型材上,三个供液箱分别为水供液箱、化肥供液箱和农药供液箱,泵机通过泵机安装板连接在横向型材上,泵机有三个,三个泵机进口处的液体输送管的另一端分别与水供液箱、化肥供液箱和农药供液箱连接,三个泵机出口处的液体输送管的另一端与四通阀相连,四通阀与供液横杆的中部连接,供液横杆连接在顶部安装板的上方并穿过顶部安装板与多个喷施结构的供液软管相连,所述四通阀与控制箱电连接。
15.作为本发明进一步改进的技术方案,所述喷施结构内的多根喷液杆分别为中间喷液杆和两个侧端喷液杆,中间喷液杆和两个侧端喷液杆的顶端均连接有供液软管,每根供液软管均与供液横杆连接,中间喷液杆和两个侧端喷液杆的底端均通过调节阀连接三个喷头;中间喷液杆上端固定连接在喷液杆连接板的中间通孔内,喷液杆连接板左右两端分别与固定连接在顶部安装板下方的两个伸缩驱动机构的端部相连,伸缩驱动机构采用第二电动推杆,所述第二电动推杆用于通过喷液杆连接板带动中间喷液杆上下移动;所述旋转驱动机构采用旋转驱动电机,所述旋转驱动电机固定连接在侧安装板上,所述侧安装板固定连接在可移动门架上且侧安装板位于表型监测模块的后方,旋转驱动电机通过旋转连杆机构与两个侧端喷液杆连接,旋转连杆机构包括两根短连杆和长连杆,旋转驱动电机的电机轴与长连杆中心连接,长连杆的两端均转动连接有短连杆,两个短连杆的一端分别与两个侧端喷液杆转动连接,两个侧端喷液杆上部均与侧安装板转动连接,所述旋转驱动电机用于带动长连杆旋转进而使短连杆带动侧端喷液杆旋转,实现侧端喷液杆倾斜角度的调整。
16.作为本发明进一步改进的技术方案,所述侧端喷液杆上部设置有伸出的轴承安装件,轴承安装件内设有轴承安装孔,侧安装板上设置有轴承安装轴,所述侧端喷液杆上端伸出的轴承安装孔与侧安装板上的轴承安装轴之间通过轴承连接从而实现侧端喷液杆上部与侧安装板的转动连接,所述侧安装板上设置有用于连接旋转驱动电机的电机安装架,所述旋转驱动电机用于带动长连杆旋转进而使短连杆带动侧端喷液杆绕轴承安装轴旋转。
17.作为本发明进一步改进的技术方案,还包括蓄电池,所述蓄电池分别通过开关与控制箱、成像传感器、第一电动推杆、第二电动推杆、旋转驱动电机、车轮驱动电机和泵机电连接。
18.为实现上述技术目的,本发明采取的另一个技术方案为:一种可移动门架式植物表型平台的精确作业管理方法,包括以下步骤:步骤1、控制箱通电工作,控制箱控制第一电动推杆运行,第一电动推杆带动伸缩连杆机构伸长到预设位置,成像传感器采集植物群体的图像并将采集的图像发送给控制箱;步骤2、控制箱通过处理与分析图像获得植物表型信息,控制箱根据获得的植物表型信息控制其中一个泵机动作且控制四通阀打开相应阀门从而实现浇水、施肥或者喷药;步骤3、控制箱根据获得的植物表型信息从四种情况中选择其中一种情况来控制第二电动推杆、旋转驱动电机和调节阀工作;
四种情况包括:情况一:控制箱控制旋转驱动电机和第二电动推杆工作,使得中间喷液杆和侧端喷液杆保持竖直向下,控制箱控制调节阀打开中间通道,使位于中间的喷头喷施植物;情况二:控制箱控制旋转驱动电机和第二电动推杆工作,使得中间喷液杆和侧端喷液杆保持竖直向下,控制箱控制调节阀打开两侧通道,使两侧的喷头喷施植物;情况三:控制箱控制第二电动推杆向上收缩,使中间喷液杆向上移动,同时控制旋转驱动电机顺时针转动以通过旋转连杆机构带动侧端喷液杆向内收缩,并且控制箱控制调节阀打开中间通道,使位于中间的喷头喷施植物;情况四:控制箱控制第二电动推杆向上收缩,使中间喷液杆向上移动,同时控制旋转驱动电机顺时针转动以通过旋转连杆机构带动侧端喷液杆向内收缩,并且控制箱控制调节阀将三个通道全部打开,使三个喷头喷施植物。
19.作为本发明进一步改进的技术方案,还包括遥控装置,所述可移动门架上设置有信号接收器,所述车轮上设置有车轮驱动电机,所述遥控装置用于远程发送信号给可移动门架上的信号接收器,信号接收器发送信号至控制箱,控制箱控制车轮驱动电机从而控制车轮的转向、停止、前进和后退。
20.本发明与现有的技术相比,具有以下优点和有益效果:本发明采用模块化的设计方法,综合了植物表型监测模块、控制箱和精确作业管理模块,实现了对不同形态的植物群体实时采集俯视图像,处理获得叶片颜色、叶片数量等植物表型信息,判断植物处于水分亏缺、营养亏缺、受病虫害侵染等受生长状态,进而决策精确作业管理模块浇水、施肥和喷药等具体精确作业管理措施的类型;处理获得株高、冠幅等表型信息,判断植物的品种类型,进而调整变换喷施结构,以实现对不同株高、不同冠幅、不同形态结构状态的植物进行及时、精准、高效的浇水、施肥和喷药。最终实现在合适的时间、合适的地点、以合适的形式、施用合适的量的水、化肥和农药,确保水、化肥和农药在整个植物上的精确、高效的沉积、覆盖和穿透,达到喷施效果的最优化,避免农用化学品浪费和污染环境。
21.本发明可实现自动行驶,远程遥控转弯、掉头,所采用的车轮结构可满足植物种植行距较小的温室及野外环境中进行平稳移动,普适性、通过性好,适应性强;并采用蓄电池供电,续航能力强。其中表型监测模块能够实现成像传感器在不同位置、不同高度的调节,可高效采集不同种类、不同形态植物的俯视图像,通过控制箱进行图像处理获取株高、冠幅、叶片颜色、叶片数量等形态结构表型数据,并根据叶片颜色、叶片数量等表型信息确定植物的生长状态,判断出植物处于水分亏缺、营养亏缺、受病虫害侵染等受胁迫情况,进而决策精确作业管理模块进行浇水、施肥和喷药等具体精确作业管理措施的类型;根据株高、冠幅等表型信息确定植物的品种类型,以控制精确作业管理模块调整变换喷施结构,以实现对不同株高、不同冠幅、不同形态结构状态的植物进行精准、高效的浇水、施肥和喷药。本发明集成了植物表型监测模块、控制箱和精确作业管理模块,可实现对不同种类、不同形态的植物群体进行实时获取生长状态信息和品种类型信息,并及时调整变换喷施结构,以进行浇水、施肥和喷药等栽培作业措施的精准调控管理,具有自动化水平高、准确高效、功能齐全、应用范围广、综合性强、适应性强、针对性强、喷施效率高等优点。
附图说明
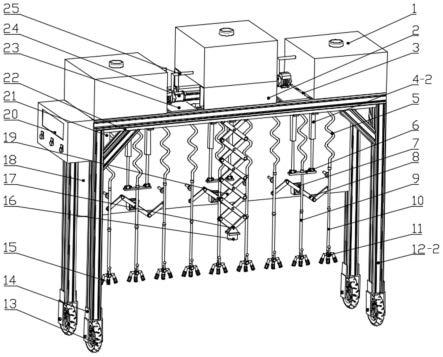
22.图1为本发明的立体图。
23.图2为本发明的主视图。
24.图3为本发明的左视图。
25.图4为本发明的俯视图。
26.图5为本发明的表型监测模块图。
27.图6为本发明的精确作业管理模块图。
28.图7为本发明的精确作业管理模块局部示意图。
29.图8为本发明的情况一喷施结构下的平台工作示意图。
30.图9为本发明的情况二喷施结构下的平台工作示意图。
31.图10为本发明的情况三喷施结构下的平台工作示意图。
32.图11为本发明的情况四喷施结构下的平台工作示意图。
33.图12为本发明的伸缩连杆机构图。
34.图13为本发明的旋转连杆机构图。
35.图14为本发明的顶部安装板图。
36.图15为本发明的侧安装板图。
37.图16为本发明的车轮连接板图。
38.图17为本发明的喷液杆连接板图。
39.图18为本发明的侧端喷液杆图。
40.图19为本发明的供液横杆图。
41.图20为本发明的调节阀图。
42.图21为本发明的技术路线图。
43.图22中的(a)为本发明的植物叶片示意图。
44.图22中的(b)为本发明的株高获取示意图。
45.图22中的(c)为本发明的冠幅获取示意图。
46.图22中的(d)为本发明的叶片数量获取示意图。
47.图1中,1、供液箱;2、方钢;3、供液横杆;4-1、第一电动推杆;4-2、第二电动推杆;5、供液软管;6、喷液杆连接板;7、旋转驱动电机;8、旋转连杆机构;801、短连杆;802、长连杆;9、中间喷液杆;10、侧端喷液杆;11、调节阀;12-1、横向型材;12-2、竖向型材;13、车轮;14、车轮连接板;15、喷头;16、成像传感器;17、传感器连接件;18、侧安装板;19、伸缩连杆机构;20、控制箱;21、蓄电池;22、顶部安装板;23、泵机安装板;24、泵机;25、液体输送管;26、四通阀。
具体实施方式
48.下面根据附图对本发明的具体实施方式作出进一步说明:本实施例提供一种集植物表型监测模块、控制箱和多功能喷施精确作业管理模块于一体的可移动门架式植物表型平台,包括可移动门架、控制箱20、表型监测模块和精确作业管理模块,所述控制箱20、表型监测模块和精确作业管理模块均安装在可移动门架上。
49.如图1至图7所示,所述可移动门架包括横向型材12-1和竖向型材12-2,四根横向
型材12-1相互连接组合成方形框架,方形框架的四个拐角处垂直固定连接有竖向型材12-2,每根竖向型材12-2的底端均设置有车轮13。
50.本实施例的可移动门架式植物表型平台可以是遥控自走式,也可以通过另外的拖拉机拉动可移动门架式植物表型平台行走。若是遥控自走式,则需设置遥控装置,可移动门架上设置有信号接收器,车轮13上设置有车轮驱动电机,遥控装置用于远程发送信号给可移动门架上的信号接收器,信号接收器发送信号至控制箱20,控制箱20控制车轮驱动电机从而控制车轮13的转向、停止、前进和后退。
51.本实施例的横向型材12-1的正下方固定连接有如图14所示的顶部安装板22,所述表型监测模块连接在顶部安装板22前端的中间部分,如图5所示,所述表型监测模块包括第一电动推杆4-1、伸缩连杆机构19、传感器连接件17和成像传感器16,所述第一电动推杆4-1连接在顶部安装板22上部,伸缩连杆机构19上端的一根连杆与第一电动推杆4-1的端部转动连接,伸缩连杆机构19上端的另一根连杆转动连接在顶部安装板22下部,伸缩连杆机构19下端通过传感器连接件17与成像传感器16相连,所述第一电动推杆4-1用于带动伸缩连杆机构19的伸长与缩短,进而实现成像传感器16在高度上的调节。
52.如图12所示,本实施例的伸缩连杆机构19采用剪叉式伸缩连杆结构,如图14所示,顶部安装板22上开设有条形槽,所述第一电动推杆4-1的端部通过位于条形槽内侧的连接杆与剪叉式伸缩连杆结构上端的一根连杆转动连接,剪叉式伸缩连杆结构上端的另一根连杆通过连接件与顶部安装板22下部转动连接。
53.所述精确作业管理模块包括供液箱1、供液管道、泵机24和喷施结构,所述供液箱1通过泵机24和供液管道与喷施结构连接。
54.所述喷施结构包括伸缩驱动机构、旋转驱动机构、供液软管5、多根喷液杆、调节阀11和喷头15。伸缩驱动机构为第二电动推杆4-2,旋转驱动机构为旋转驱动电机7。每根喷液杆的顶端均通过供液软管5与供液管道连接,所述第二电动推杆4-2与一根喷液杆连接且用于驱动喷液杆上下移动,所述旋转驱动电机7与另一根喷液杆连接且用于驱动另一根喷液杆旋转;每根喷液杆的底端均通过调节阀11连接多个喷头15。
55.如图4、图6和图7所示,所述供液管道包括液体输送管25和如图19所示的供液横杆3,所述供液箱1有三个,三个供液箱1并排设置在横向型材12-1上,位于中间的供液箱1通过方钢2连接在横向型材12-1上,三个供液箱1分别为水供液箱、化肥供液箱和农药供液箱,泵机24通过泵机安装板23连接在横向型材12-1上,泵机24有三个,三个泵机24进口处的液体输送管25的另一端分别与水供液箱、化肥供液箱和农药供液箱连接,三个泵机24出口处的液体输送管25的另一端与四通阀26相连,四通阀26与供液横杆3的中部连接,供液横杆3连接在顶部安装板22的上方并穿过顶部安装板22与多个喷施结构的供液软管5相连,所述四通阀26与控制箱20电连接。
56.所述喷施结构内的多根喷液杆分别为中间喷液杆9和两个侧端喷液杆10,中间喷液杆9和两个侧端喷液杆10的顶端均连接有供液软管5,每根供液软管5均与供液横杆3连接,中间喷液杆9和两个侧端喷液杆10的底端均通过如图20所示的调节阀11连接三个喷头15。
57.中间喷液杆9上端固定连接在如图17所示的喷液杆连接板6的中间通孔内,喷液杆连接板6左右两端的连接耳分别与固定连接在顶部安装板22下方的两个第二电动推杆4-2
的端部相连,第二电动推杆4-2用于通过喷液杆连接板6带动中间喷液杆9上下移动。
58.旋转驱动电机7固定连接在如图15所示的侧安装板18上,侧安装板18固定连接在可移动门架上且侧安装板18位于表型监测模块的后方,旋转驱动电机7通过旋转连杆机构8与两个侧端喷液杆10连接,如图6和图13所示,旋转连杆机构8包括两根短连杆801和长连杆802,旋转驱动电机7的电机轴与长连杆802中心孔连接,长连杆802的两端均转动连接有短连杆801,两个短连杆801的一端分别与两个侧端喷液杆10转动连接,两个侧端喷液杆10上部均与侧安装板18转动连接,所述旋转驱动电机7用于带动长连杆802旋转进而使短连杆801带动侧端喷液杆10旋转,实现侧端喷液杆10倾斜角度的调整。
59.如图18所示,其中侧端喷液杆10上部设置有伸出的轴承安装件1001,轴承安装件1001内设有轴承安装孔,侧安装板18上设置有轴承安装轴,所述侧端喷液杆10上端伸出的轴承安装孔与侧安装板18上的轴承安装轴之间通过轴承连接从而实现侧端喷液杆10上部与侧安装板18的转动连接,所述侧安装板18上设置有用于连接旋转驱动电机7的电机安装架,所述旋转驱动电机7用于带动长连杆802旋转进而使短连杆801带动侧端喷液杆10绕轴承安装轴旋转。
60.如图1所示,可移动门架式植物表型平台的可移动门架上还安装有蓄电池21,所述蓄电池21分别通过开关与控制箱20、成像传感器16、第一电动推杆4-1、第二电动推杆4-2、旋转驱动电机7、车轮驱动电机和泵机24电连接。所述第一电动推杆4-1、第二电动推杆4-2、旋转驱动电机7、泵机24、调节阀11和四通阀26均与控制箱20电连接。
61.本实施例的表型监测模块用于采集植物群体的图像,控制箱20用于处理和分析图像并分别控制第一电动推杆4-1、第二电动推杆4-2、旋转驱动电机7、泵机24、调节阀11和四通阀26工作。
62.本发明采用蓄电池21供电,可持续工作时间长,由横向型材12-1和竖向型材12-2构建整体框架,四角处采用斜拉型材提高平台的稳定性,四根竖向型材12-2的下端分别通过如图16所示的车轮连接板14与车轮13相连。所采用的四轮驱动形式可实现平台的自动平稳行驶,信号接收器可通过远程遥控完成平台的转弯和掉头。
63.本实施例的表型监测模块安装在顶部安装板22前端的中间部分,在表型监测模块中,第一电动推杆4-1由连接件固定在顶部安装板22上部,伸缩连杆机构19上端的一根连杆与电动推杆4的端部相连,另一根连杆连在顶部安装板22下部,成像传感器16通过传感器连接件17安装在伸缩连杆机构19下端。通过第一电动推杆4-1的伸缩带动伸缩连杆机构19的伸长与缩短,进而实现成像传感器16在高度上的调节。
64.精确作业管理模块安装在顶部安装板22的后半部分,精确作业管理模块共有三个供液箱1,分别装有水、化肥和农药,两侧的供液箱1直接安装在横向型材12-1上,中间的供液箱1固定在方钢2正上方,为液体输送管25的安装提供充足的空间,方钢2安装在横向型材12-1的正中部,以使供液箱1位于平台的正中部,且两侧的供液箱1对称布置,进而能够保证平台的稳定与平衡。泵机24通过泵机安装板23固定于横向型材12-1上并位于供液箱1之间,三个泵机24进口处的液体输送管25的另一端与三个供液箱1相连,三个泵机24出口处的液体输送管25的另一端与四通阀26相连,控制箱可以根据分析出的生长状态控制四通阀26打开相应的阀门,以实现将相应供液箱1中的液体抽出并输入供液横杆3中,供液横杆3安装在顶部安装板22的上方并穿过顶部安装板22与供液软管5相连,供液软管5的下方分别与中间
喷液杆9和侧端喷液杆10的上端相连。其中,中间喷液杆9上端固定于喷液杆连接板6的中间,每个喷液杆连接板6左右两端分别与固定在顶部安装板22下方的两个第二电动推杆4-2端部相连,第二电动推杆4-2伸缩可通过喷液杆连接板6带动中间喷液杆9上下移动。侧端喷液杆10上部伸出的轴承安装孔与侧安装板18上面的轴承安装轴之间装有轴承,旋转连杆机构8中两根短连杆801的一端分别与两根侧端喷液杆10相连,另一端与长连杆802相连,旋转驱动电机7的电机轴与长连杆802中心相连,电机轴转动带动长连杆802旋转进而使短连杆801带动侧端喷液杆10经过轴承绕轴承轴旋转,实现侧端喷液杆10倾斜角度的调整。其中,中间喷液杆9和侧端喷液杆10自身都可以实现一定长度上的调节,使平台更灵活地适用于各种形态类型的植物。中间喷液杆9和侧端喷液杆10的下端均安装有调节阀11,每个调节阀11下端有三个接口,可连接三个喷头15。
65.本实施例还提供一种可移动门架式植物表型平台的精确作业管理方法,包括以下步骤:步骤1、打开开关(开关可以是手动开关,也可以是电动开关,若是电动开关,可以通过遥控装置遥控其通断),控制箱20通电工作,控制箱20控制第一电动推杆4-1运行,第一电动推杆4-1带动伸缩连杆机构19伸长到预设位置,成像传感器16采集植物群体的图像并将采集的图像发送给控制箱20;第一电动推杆4-1的行程决定了伸缩连杆机构19的伸长长度,本实施例第一电动推杆4-1的行程可通过人工在控制箱20上提前设置,控制箱20带有触摸显示屏。
66.步骤2、控制箱20处理与分析图像进而获得植物表型信息,控制箱20根据获得的植物表型信息控制其中一个泵机24工作且控制四通阀26打开相应阀门从而实现浇水、施肥或者喷药;步骤3、控制箱20根据获得的植物表型信息从四种情况中选择其中一种情况来控制喷施结构动作;四种情况包括:如图8所示,情况一:控制箱20控制旋转驱动电机7和第二电动推杆4-2工作,使得中间喷液杆9和侧端喷液杆10保持竖直向下,控制箱20控制调节阀11打开中间通道,使位于中间的喷头15喷施植物;如图9所示,情况二:控制箱20控制旋转驱动电机7和第二电动推杆4-2工作,使得中间喷液杆9和侧端喷液杆10保持竖直向下,控制箱20控制调节阀11打开两侧通道,使两侧的喷头15喷施植物;如图10所示,情况三:控制箱20控制第二电动推杆4-2向上收缩,使中间喷液杆9向上移动,同时控制旋转驱动电机7顺时针转动以通过旋转连杆机构8带动侧端喷液杆10向内收缩,并且控制箱20控制调节阀11打开中间通道,使位于中间的喷头15喷施植物;如图11所示,情况四:控制箱20控制第二电动推杆4-2向上收缩,使中间喷液杆9向上移动,同时控制旋转驱动电机7顺时针转动以通过旋转连杆机构8带动侧端喷液杆10向内收缩,并且控制箱20控制调节阀11将三个通道全部打开,使三个喷头15喷施植物。
67.其中步骤2具体为:本实施例的表型监测模块与精确作业管理模块通过控制箱20联系起来,控制箱20固定于平台的一侧,如图21所示,表型监测模块可获取植物群体的俯视图像,控制箱20通过处理与分析图像可得到株高、冠幅、叶片颜色、叶片数量等植物表型信
息,根据叶片颜色、叶片数量等各种形态结构表型信息判断植物处于水分亏缺、营养亏缺、受病虫害侵染等生长状态,基于所获取的生长状态,决策精确作业管理模块进行浇水、施肥和喷药等具体精确作业管理措施的类型。针对不同生长状态的植物,精确作业管理模块可实现三种喷施管理措施的调整变换。一:由表型监测模块和控制箱20获取到叶片狭小、叶片增厚、叶片下垂、叶尖枯死、叶片卷曲、叶片萎蔫、颜色变深、颜色变暗等状况,判断出植物处于水分亏缺受胁迫情况,则由控制箱20控制四通阀26打开相应阀门进行浇水;二:由表型监测模块和控制箱20获取到叶片稀疏、颜色变浅、颜色发黄、颜色发灰、叶片缺乏光泽、叶片焦枯碎裂、叶片枯死脱落、叶片呈杯卷状或皱缩等状况,判断出植物处于营养亏缺等受胁迫情况,则由控制箱20控制四通阀26打开相应阀门进行施肥;三:由表型监测模块和控制箱20获取到叶片坏死、叶片畸形、叶片腐烂、叶片失绿、叶片出现杂色、叶片出现斑点、叶片出现空洞、叶片边缘不连续等状况,判断出植物处于受病虫害侵染等受胁迫情况,则由控制箱20控制四通阀26打开相应阀门进行喷药。
68.其中步骤3具体为:如图21所示,控制箱20根据获得的株高、冠幅及其比值等植物表型信息判断植物品种类型,以控制精确作业管理模块调整变换喷施结构。针对不同形态的植物,精确作业管理模块可实现四种喷施结构的调整变换。如图8所示,情况一:由表型监测模块和控制箱20判断出属于低矮、紧凑、冠幅小的植物,如结球类蔬菜,中间喷液杆9和侧端喷液杆10保持竖直向下,控制箱20控制调节阀11只打开中间通道,使中间喷头15喷施植物;如图9所示,情况二:由表型监测模块和控制箱20判断出属于低矮、浓密、冠幅较大的植物,如莲座类植物,中间喷液杆9和侧端喷液杆10保持竖直向下,控制箱20控制调节阀11打开两侧通道,使两侧喷头15喷施植物,相较于第一种情况,喷施范围增大;如图10所示,情况三:由表型监测模块和控制箱20判断出属于株高较大、纤细亭立、冠幅较小的植物,如林业苗木和篱架型植物,控制箱20控制第二电动推杆4-2向上收缩,使中间喷液杆9向上移动,同时控制旋转驱动电机7顺时针转动电机轴以通过旋转连杆机构8带动侧端喷液杆10向内收缩,并且控制箱20控制调节阀11只打开中间通道,使中间喷头15喷施植物,此种喷施结构可实现水、化肥和农药穿透植物整个立体冠层。如图11所示,情况四:由表型监测模块和控制箱20判断出属于株高较大、浓密、冠幅较大的植物,如灌木类植物,控制箱20控制第二电动推杆4-2向上收缩,使中间喷液杆9向上移动,同时控制旋转驱动电机7顺时针转动电机轴以通过旋转连杆机构8带动侧端喷液杆10向内收缩,其中中间喷液杆9的收缩高度及侧端喷液杆10的收缩角度由控制箱20根据植株株高和冠幅进行调节。并且控制箱20控制调节阀11将三个通道全部打开,使三个喷头15喷施植物,此种喷施结构可实现水、化肥和农药对整株植物的全覆盖、穿透性喷施。根据不同植物的形态特点,精确作业管理模块可调整变换合适的喷施结构,优化喷施效果并可实现水、化肥和农药利用率的最大化。
69.控制箱20利用表型监测模块获取冠幅、株高、叶片颜色、叶片数量等植物表型信息的方法如下:将表型监测模块中的成像传感器16所拍摄到的彩色图像进行灰度化和二值化阈值处理,通过高斯滤波和开运算去除二值化图片的噪声点,对预处理好的图片利用findcontours函数查找图像轮廓,并绘制最小包围圆形,通过测量最小包围圆形的直径来获取冠幅参数,如图22中的(c)所示;将彩色图像从rgb颜色空间转到hsv颜色空间,并计算图像中植物叶片的h通道值以获取叶片颜色,如图22中的(a)所示;对表型监测模块中的成像传感器所拍摄到的深度图像进行处理得到最小深度值h
min
作为成像传感器16(如相机)与
植物最顶端之间的距离,最大深度值h
max
作为成像传感器16与种植植物地面之间的距离,进而获取株高h=h
max-h
min
,如图22中的(b)所示;融合利用成像传感器16获得的俯视植物深度图像与彩色图像以获得植物叶片的彩色三维点云,使用基于密度的dbscan (density-based spatial clustering of applications with noise)聚类算法对每个叶片进行聚类分割以获取植物的叶片数量,如图22中的(d)所示。
70.本发明采用模块化的设计方法,综合了植物表型监测模块、控制箱和精确作业管理模块,实现了对不同形态的植物群体实时采集俯视图像,处理获得叶片颜色、叶片数量等表型信息,判断植物处于水分亏缺、营养亏缺、受病虫害侵染等受生长状态,进而决策精确作业管理模块浇水、施肥和喷药等具体精确作业管理措施的类型;处理获得株高、冠幅等表型信息,判断植物的品种类型,进而调整变换喷施结构,以实现对不同株高、不同冠幅、不同形态结构状态的植物进行精准、高效的浇水、施肥和喷药。最终实现在合适的时间、合适的地点、以合适的形式、施用合适的量的水、化肥和农药,确保水、化肥和农药在整个植物上的精确、高效的沉积、覆盖和穿透,达到喷施效果的最优化,避免农用化学品浪费和污染环境。
71.本发明的保护范围包括但不限于以上实施方式,本发明的保护范围以权利要求书为准,任何对本技术做出的本领域的技术人员容易想到的替换、变形、改进均落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1