一种便捷式远程遥控固定装置的制作方法
1.本发明涉及固定装置技术领域,尤其涉及一种便携式远程遥控固定装置。
背景技术:
2.目前电线路的高度一般在13米以下,且很多集中在城镇乡村等人口较密集区,线路下方还时常会有树木等绿化带。绿化带树木较高处经常出现树碰线、树穿线等缺陷,严重时会导致相间短路引起线路跳闸或者附近人员伤亡等事故。
3.现有技术中,解决上述问题一般是靠人工裁剪树枝,主要是通过人工攀爬到指定位置进行裁剪,或者是借助绝缘斗臂车移动到指定位置进行裁剪,人工裁剪树枝比较费时费力,且砍伐的树木的倒向无法控制,这样容易对周围的线路造成一定的损害和大范围停电。
技术实现要素:
4.本发明的目的在于提供一种便携式远程遥控固定装置,用于解决人工砍伐树木无法控制树木倒向的问题。
5.本发明第一方面提供了一种便携式远程遥控固定装置,包括:
6.驱动模块、咬合控制模块、电磁模块、咬合片、轴杆、伸缩杆以及传动机构;
7.所述咬合控制模块分别连接所述驱动模块和所述咬合片;
8.所述电磁模块设置在所述咬合片的一端,所述咬合片通过所述电磁模块固定在所述轴杆上;
9.所述轴杆的一端连接所述伸缩杆的一端;
10.所述伸缩杆的一侧连接所述传动机构。
11.可选的,所述咬合控制模块包括咬合电机、活动推进块以及联动片,所述活动推进块分别连接所述咬合电机和联动片,所述联动片在所述轴杆外上下活动。
12.可选的,所述咬合片的尾端设置有连杆,所述连杆连接所述活动推进块和联动片。
13.可选的,所述伸缩杆包括一级伸缩杆、二级伸缩杆、三级伸缩杆以及四级伸缩杆,所述一级伸缩杆的一端连接所述轴杆,所述一级伸缩杆的另一端连接所述二级伸缩杆的一端,所述二级伸缩杆的另一端连接所述三级伸缩杆的一端,所述三级伸缩杆的另一端连接所述四级伸缩杆的一端。
14.可选的,所述传动机构包括升降电机和卷线轮,所述升降电机和卷线轮分别设置在所述一级伸缩杆与二级伸缩杆的连接处、所述二级伸缩杆与三级伸缩杆的连接处及所述三级伸缩杆与四级伸缩杆的连接处。
15.可选的,所述一级伸缩杆的一侧设置有滑轮,所述一级伸缩杆与所述轴杆连接处设置有万向节,所述滑轮位于所述万向节的下方。
16.可选的,还包括盒体,所述驱动模块、咬合控制模块、电磁模块和轴杆分别安装在所述盒体内。
17.可选的,所述盒体内还设置有信号接收器,所述信号接收器连接所述驱动模块,所述信号接收器用于接收遥控器发出无线编码信号。
18.可选的,所述咬合片的外侧分别设置有拉环,所述拉环的直径根据绳索直径大小设置。
19.可选的,所述轴杆的内部设置有旋转轴,所述旋转轴连接所述咬合片。
20.从以上技术方案可以看出,本发明具有以下优点:本发明中设置了驱动模块、咬合控制模块、电磁模块、咬合片、轴杆、伸缩杆以及传动机构,其中咬合控制模块分别连接驱动模块和咬合片,电磁模块设置在咬合片的一端,咬合片通过电磁模块固定在轴杆上,轴杆的一端连接伸缩杆的一端,伸缩杆的一侧连接传动机构,本发明采用电控设计,无人工作人员登高操作,避免了安全事故的发生,通过装置的咬合,可控制砍伐树木的倒向,避免对附近线路以及房屋造成不必要的损害,避免树木的掉落对人体造成伤害,装置操作简单,使用方便,省时省力,适用于不同尺寸的树木,具有较高的实用性。
附图说明
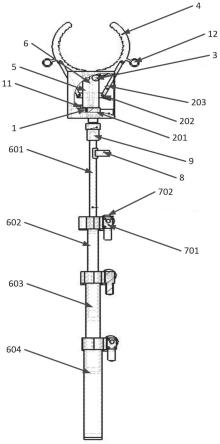
21.图1为本发明中便携式远程遥控固定装置的一个结构示意图;
22.图2为本发明中便携式远程遥控固定装置的另一个结构示意图。
具体实施方式
23.本技术实施例提供了一种便携式远程遥控固定装置,用于通过咬合控制砍伐树木的倒向,避免对附近线路以及房屋造成不必要的损害。
24.下面将结合本技术实施例中的附图,对本技术中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
25.请参阅图1至图2,本发明第一方面提供了一种便携式远程遥控固定装置,包括驱动模块1、咬合控制模块2、电磁模块3、咬合片4、轴杆5、伸缩杆6以及传动机构7,咬合控制模块2分别连接驱动模块1和咬合片4;电磁模块3设置在咬合片4的一端,咬合片4通过电磁模块3固定在轴杆5上;轴杆5的一端连接伸缩杆6的一端;伸缩杆6的一侧连接传动机构7,驱动模块1用于驱动咬合控制模块2来控制咬合片的“咬”和“松”,伸缩杆6和传动机构7配合将装置移动至指定位置,装置简单,携带便捷,使用方便。
26.进一步的,咬合控制模块2包括咬合电机201、活动推进块202以及联动片203,活动推进块202分别连接咬合电机201和联动片203,联动片203在轴杆5外上下活动;咬合片4的尾端设置有连杆,连杆连接活动推进块202和联动片203,活动推进块202通过咬合电机201进行推动,产生推力,通过控制指令,来决定咬合动作。
27.进一步的,伸缩杆6采用绝缘材料,伸缩杆6包括一级伸缩杆601、二级伸缩杆602、三级伸缩杆603以及四级伸缩杆604,一级伸缩杆601的一端连接轴杆5,一级伸缩杆601的另一端连接二级伸缩杆602的一端,二级伸缩杆602的另一端连接三级伸缩杆603的一端,三级伸缩杆603的另一端连接四级伸缩杆604的一端;传动机构7包括升降电机701和卷线轮702,升降电机701和卷线轮702分别设置在一级伸缩杆601与二级伸缩杆602的连接处、二级伸缩
杆602与三级伸缩杆603的连接处及三级伸缩杆603与四级伸缩杆604的连接处;一级伸缩杆601的一侧设置有滑轮8,一级伸缩杆601与轴杆5连接处设置有万向节9,滑轮8位于万向节9的下方。
28.具体的,通过设置四级伸缩杆可以根据不同裁剪高度进行调节装置的高度;升降电机701连接有电源,接通电源可以通过升降电机701自动控制每一个级别的伸缩杆进行伸缩。装置采用伸缩杆进行承接,滑轮8的设计可以使拉绳更加方便快捷,万向节9的设计可以使得装置实现360度的旋转,卷线轮702则用于收缩绳索,通过升降电机701提供动力,直接作用在升缩杆6上,带动伸缩杆6升降,以达到作业要求的高度。
29.进一步的,装置还包括盒体10,驱动模块1、咬合控制模块2、电磁模块3和轴杆5分别安装在盒体10内;盒体10内还设置有信号接收器11,信号接收器11连接驱动模块1,信号接收器11用于接收遥控器发出远程无线编码信号,将远程控制指令信号发送至驱动模块1,驱动模块1根据指令驱动咬合控制模块2来控制咬合片4的咬和松。
30.进一步的,咬合片4的外侧分别设置有两个拉环12,拉环12的直径根据绳索直径大小设置;轴杆5的内部设置有旋转轴501,旋转轴501连接咬合片4;拉环12上面绑拉绳,通过拉绳的控制来确定树木的倒向,旋转轴501用于控制轴杆5的旋转方向。
31.本实施例中的工作原理:使用装置时,接通电源,启动升降电机通过控制伸缩杆带动咬合片达到作业要求高度,作业人员通过遥控器远程控制驱动模块,驱动模块在接收到控制指令后,驱动咬合控制模块,咬合控制模块根据不同直径的树木调节咬合片的开口程度,完成树木固定操作;作业人员再将绳索绑在拉环上,通过控制拉绳来确定树木的倒向。待树木已经确定安全倒下后,作业人员再通过遥控器远程间接控制咬合片松开,完成松开操作。
32.需要说明的是,对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本技术。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本技术的范围的情况下,在其它实施例中实现。因此,本技术不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1