一种智慧大棚番茄采摘设备的制作方法
1.本发明涉及智慧农业采摘机械技术领域,具体是一种智慧大棚番茄采摘设备。
背景技术:
2.番茄在日常生活中是人们深受所爱的果蔬之一,因此其种植和市场需求正处于上升阶段。果蔬的采收是农业生产的重要环节,但目前我国采摘番茄主要依靠手工采摘,不仅采摘效率低下、采摘成本高,又影响番茄的采摘期。同时现有的采摘设备主要针对的是单个番茄的采摘,对坏番茄和枯叶枯梗的处理相对较少,在番茄采收过程其叶片的遮挡,对番茄的采收也有一定的影响,并且在该条件下对图像识别组件的要求也较高。
3.因此,有必要提供一种智慧大棚番茄采摘设备,以解决上述背景技术中提出的问题。
技术实现要素:
4.为实现上述目的,本发明提供如下技术方案:一种智慧大棚番茄采摘设备,包括:机身、行走机构、机械臂一、机械臂二和图像采集装置,其中,所述行走机构固定在机身下端面,所述机身两侧对称分布有机械臂一与机械臂二,且所述机械臂一与机械臂二可独立完成作业,所述机身上端转动设置有伸缩柱,所述伸缩柱的输出端上固定有图像采集装置,所述机身行进方向的一侧固定有周装箱底架,所述周装箱底架上安装有周转箱。
5.进一步,作为优选,所述机械臂一与所述机械臂二部分结构相同,均包括六轴机械臂;
6.所述机械臂一包括:机械刀,所述机械刀固定在一个六轴机械臂的输出端;
7.所述机械臂二包括:机械爪,所述机械爪固定在另一个六轴机械臂的输出端。
8.进一步,作为优选,所述机械刀包括:圆台、中轴、滑块和刀,其中,所述圆台固定在所述六轴机械臂的输出端,且所述六轴机械臂的输出端内部安装有自动伸缩杆,所述自动伸缩杆的输出端固定有中轴,所述中轴可滑动的设置在所述圆台内,且所述中轴远离自动伸缩杆的一端固定有滑块,所述滑块可活动轴接有刀,且所述刀通过滑块的轴向滑动进行开合,所述刀包括上刀刃以及下刀刃,用于剪切夹持番茄果梗。
9.进一步,作为优选,所述上刀刃被配置为锋利的刀刃结构,下刀刃被配置为表面平整的平刀结构,且所述下刀刃通过弹簧可轴向滑动的设置在所述刀刀身上。
10.进一步,作为优选,所述机械爪包括:气动旋转机构、气动轴、爪架和吹嘴,其中,所述气动旋转机构安装在六轴机械臂的输出端,且所述六轴机械臂的输出端内部安装有自动伸缩杆,所述自动伸缩杆的输出端固定有气动轴,所述气动轴可滑动的设置在所述气动旋转机构内,所述气动轴被配置为中空结构,且所述气动旋转机构远离所述六轴机械臂的一侧通过连接片铰接有多个爪刃,所述爪刃被配置为柔软的材质,且所述自动伸缩杆的输出端中心位置固定有吹嘴,所述吹嘴被配置为柔软的硅胶材质。
11.进一步,作为优选,所述图像采集装置上设有视觉识别组件,所述视觉识别组件组
件与设置于所述机身的控制系统相连,所述控制系统与所述机械臂一与机械臂二相连。
12.进一步,作为优选,所述图像采集装置被配置为两个,且均与所述伸缩柱的输出端相连,可实现图像采集装置的上下移动,所述伸缩柱通过固定在所述机身内部的步进电机进行转动。
13.进一步,作为优选,所述周转箱底架被配置为两个,包括:可活动连接片、底架和气缸往返机构,其中,所述可活动连接片对称固定在所述机身一侧,所述底架通过双头连接件可滑动的设置在所述可活动连接片上,且两个所述所述可活动连接片之间固定有气缸往返机构,所述气缸往返机构的输出端与所述底架固定相连,用于驱动其在可活动连接片上进行滑动。
14.与现有技术相比,本发明提供了一种智慧大棚番茄采摘设备,具有以下有益效果:
15.本发明实施例中,番茄的采摘设备采用两个不同的摘取机构,配合多自由度机械臂,在实现精准距离可调控的同时,又可方便对坏番茄和枯叶枯梗进行回收处理,提高采摘效率。当果实被叶片遮挡时,视觉识别组件检测较为困难,无法识别番茄成熟程度与好坏程度,本发明通过机械臂搭配吹嘴的方式,用于吹走叶片提高定位精度,降低对视觉识别组件的要求,同时方便机械爪在夹取番茄时吹走遮挡,避免果实和叶片同时被采摘。
附图说明
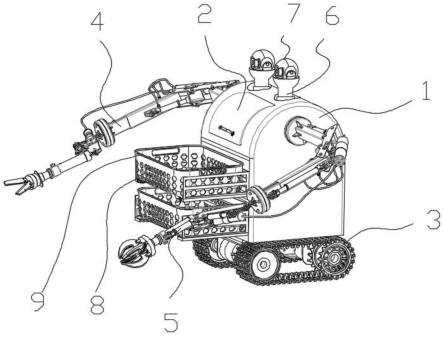
16.图1为一种智慧大棚番茄采摘设备的整体结构示意图;
17.图2为一种智慧大棚番茄采摘设备中机械臂一的结构示意图;
18.图3为一种智慧大棚番茄采摘设备中机械臂二的结构示意图;
19.图4为图2机械臂一中机械刀的结构示意图;
20.图5为图4机械刀中刀的结构示意图;
21.图6为图3机械臂二中机械爪的结构示意图;
22.图7为一种智慧大棚番茄采摘设备中伸缩柱的结构示意图;
23.图8为一种智慧大棚番茄采摘设备中周转箱底架的结构示意图;
24.图中:1、机身;2、机顶盖;3、行走机构;4、机械臂一;41、机械刀;411、圆台;412、中轴;413、滑块;414、刀;4141、上刀刃;4142、下刀刃;5、机械臂二;51、机械爪;511、气动旋转机构;512、气动轴;513、连接片;514、爪架;515、爪刃;516、吹嘴;6、伸缩柱;7、图像采集装置;8、周转箱底架;81、底架;82、双头连接件;83、可活动连接片;84、气缸往返机构;9、周转箱;10、步进电机。
具体实施方式
25.请参阅图1~8,本发明实施例中,一种智慧大棚番茄采摘设备,包括:机身1、行走机构3、机械臂一4、机械臂二5和图像采集装置7,其中,所述行走机构3固定在机身1下端面,所述机身1两侧对称分布有机械臂一4与机械臂二5,且所述机械臂一4与机械臂二5可独立完成作业,实现在车体运动方向中的任意采摘定位,所述机身1上端转动设置有伸缩柱6,所述伸缩柱6的输出端上固定有图像采集装置7,所述机身1行进方向的一侧固定有周装箱底架8,所述周装箱底架8上安装有周转箱9,进而番茄采摘设备可通过机械臂一4和机械臂5将番茄送至位于周装箱底架8上的周转箱9中。
26.本实施例中,如图2、3,所述机械臂一4与所述机械臂二5部分结构相同,所述机械臂一4与所述机械臂二5部分结构相同,均包括六轴机械臂;
27.所述机械臂一4包括:机械刀41,所述机械刀41固定在六轴机械臂的输出端,可通过六轴机械臂上自动伸缩杆的伸缩来控制所述机械刀41的闭合,进而来控制对番茄果梗的作用力;
28.所述机械臂二5包括:机械爪51,所述机械爪51固定在六轴机械臂的输出端,机械爪51可通过改变六轴机械臂上自动伸缩杆的伸缩对番茄进行夹持功能的实现。
29.本实施例中,如图4,所述机械刀41包括:圆台411、中轴412、滑块413和刀414,其中,所述圆台411固定在所述六轴机械臂的输出端,且所述六轴机械臂的输出端内部安装有自动伸缩杆,所述自动伸缩杆的输出端固定有中轴412,所述中轴412可滑动的设置在所述圆台内,且所述中轴412远离自动伸缩杆的一端固定有滑块413,所述滑块413可活动轴接有刀414,且所述刀414通过滑块413的轴向滑动进行开合,工作时,自动伸缩杆的伸缩可控制所述中轴412的轴向移动,进而控制刀414的开合,实现限位功能,所述刀414包括上刀刃4141以及下刀刃4142,用于剪切夹持坏番茄果梗和枯梗枯叶柄。
30.作为较佳的实施例,如图5,所述上刀刃4141被配置为锋利的刀刃结构,下刀刃4142被配置为表面平整的平刀结构,且所述下刀刃4142通过弹簧可轴向滑动的设置在所述刀414刀身上,刀414闭合时,上刀刃4141对坏番茄果梗和枯梗枯叶柄进行切断作用,同时下刀刃4142下端弹簧受到番茄果梗的反作用力轴向缩短,下刀刃4142对已切断的番茄果梗和枯梗枯叶柄起夹持作用,可用来收集成坏番茄和枯叶枯梗。
31.本实施例中,如图6所示,所述机械爪51包括:气动旋转机构511、气动轴512、爪架514和吹嘴516,其中,所述气动旋转机构511安装在六轴机械臂的输出端,且所述六轴机械臂的输出端内部安装有自动伸缩杆,所述自动伸缩杆的输出端固定有气动轴512,所述气动轴512可滑动的设置在所述气动旋转机构511内,所述爪架514可通过改变气动轴512的伸缩实现爪的闭合,所述气动旋转机构511可控制爪架514的圆周运动,所述气动轴512被配置为中空结构,且所述气动旋转机构511远离所述六轴机械臂的一侧通过连接片513铰接有多个爪刃515,所述爪刃515被配置为柔软的材质,有利于机械爪51在夹持番茄果实时对番茄起保护作用,且所述自动伸缩杆的输出端中心位置固定有吹嘴516,所述吹嘴516被配置为柔软的硅胶材质,也就是说,当进行图像识别时,气动轴512通过自动伸缩杆带动吹嘴516共同向远离所述机械臂二5的方向进行运动,从而使吹嘴516伸出所述爪刃515,并在图像识别时吹掉番茄四周的叶片遮挡,当进行摘取时,机械臂5向番茄进行移动,此时吹嘴516继续进行吹气工作,在吹气的同时,气动轴512通过自动伸缩杆带动吹嘴516向远离番茄的方向运动,从而通过爪刃515对番茄进行夹取,通过持续吹气,避免了番茄和叶片一同被夹取。
32.本实施例中,所述图像采集装置7上设有视觉识别组件,所述视觉识别组件组件与设置于所述机身1的控制系统相连,所述控制系统与所述机械臂一4与机械臂二5相连。
33.作为较佳的实施例,所述图像采集装置7被配置为两个,且均与所述伸缩柱6的输出端相连,可实现图像采集装置7的上下移动,所述伸缩柱6通过固定在所述机身1内部的步进电机10进行转动,通过对步进电机10的转速来实现图像采集机构7的周向旋转,图像采集装置7不工作时,伸缩柱6处于初始收缩位置且摄像头自动翻转,图像采集装置7的镜头对着伸缩柱6顶端底部,有利于保护图像采集装置7的镜头。
34.本实施例中,如图8,所述周转箱底架8被配置为两个,包括:所述可活动连接片81对称固定在所述机身1一侧,所述底架83通过双头连接件82可滑动的设置在所述可活动连接片81上,且两个所述所述可活动连接片81之间固定有气缸往返机构84,所述气缸往返机构84的输出端与所述底架83固定相连,用于驱动其在可活动连接片81上进行滑动,有利于控制系统判定上下底架的工作状态。
35.在具体实施时,番茄采摘设备在番茄行间作业,图像采集装置7将采集的图像信息反馈于控制系统,控制系统可通过判定果实的成熟程度或枯叶枯梗位置来控制行走机构3的启停,当控制系统通过判定果实的成熟程度控制行走机构3的启停时:当果实被叶片遮挡,启用机械臂二5上的吹嘴516吹走遮挡,进而检测番茄的表面好坏程度、主茎、果实和果梗,控制系统标记采摘达到合格的果实,当控制系统判定有采摘不合格的果实时,启用机械臂二4上机械刀41进行采摘,将番茄放入上层所述周转箱9;当控制系统判定有采摘合格的果实时,启用机械臂二5上的机械爪51和吹嘴516,吹嘴516用于吹走番茄叶片,防止机械爪51同时夹取到番茄和番茄叶,然后进行采摘,将番茄放入下层所述周转箱9中;当控制系统通过判定枯叶枯梗位置来控制行走机构3的启停时,启用机械臂二4上的机械刀41对叶柄(或将番茄叶片连接到主茎的叶梗)进行切除,对切除的精度保持在3cm
±
1cm,有利于枯叶枯梗在周转箱9的储存,当图像采集装置7检测到所装载物体与周转箱9四周边沿平齐时收回周转箱底架,图像采集装置7摄像头与后退方向保持一致,番茄采摘设备后退并自动返程,同时人工卸载周转箱9,将坏番茄和枯叶枯梗填入沼气池,获得清洁能源。
36.以上所述的,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1