一种机械化食用菌快速采摘装置的制作方法
1.本发明涉及食用菌技术领域,具体是一种机械化食用菌快速采摘装置。
背景技术:
2.食用菌种植是农业发展中的传统产业,经济效益亦显著,近年来,食用菌技术的不断创新与发展,食用菌的种植规模日渐扩大。然而传统的食用菌采摘采收基本都靠人工完成,采摘效率低下,同时采摘成本也较高,人工采收时,采摘工需要带着采摘篮,对每个摆放架的食用菌进行采摘,因此导致采摘工作很不便。而现有的采摘装置只针对生长在菌棒圆周表面上的食用菌,对菌棒两端面上生长的食用菌采摘相对较少,同时现有的采摘装置体积相对较大,移动不方便,采收效果也不太理想,容易导致木屑和食用菌混杂在一起。
3.因此,有必要提供一种机械化食用菌快速采摘装置,以解决上述背景技术中提出的问题。
技术实现要素:
4.为实现上述目的,本发明提供如下技术方案:一种机械化食用菌快速采摘装置,包括:
5.机身,水平放置于地面上;
6.复进机构,其固定于所述机身上;
7.夹持机构,竖直装配在所述复进机构下方,用于夹取食用菌棒;
8.刮刀机构,固定于所述机身上;
9.直线式振动筛,其设置于所述夹持机构正下方,且固定在所述机身上;
10.且,采摘时,先用所述夹持机构对食用菌棒进行固定,再利用复进机构和刮刀机构的配合进行采摘,使得食用菌沿位于机身的滑道进入直线式振动筛,直至筛选出食用菌,且机身的左右两侧位置均设有传输带。
11.进一步,作为优选,所述复进机构包括:
12.气缸一,固定于所述机身上;
13.复进杆,其装配在所述气缸一内部;
14.复进架一,所述复进架一固定在所述复进杆的下方,另一端可竖直滑动设置于所述机身上。
15.进一步,作为优选,所述夹持机构包括:
16.连接柱,其上端可旋转安装于所述复进架一下方,且所述连接柱可竖直滑动设置于所述机身上;
17.连接架,其固定于所述连接柱下方;
18.定位器,所述定位器下端固定于所述机身上,另一端固定于所述连接柱上;
19.气缸二,被配置为两个,所述气缸二固定设置于所述连接架上,且输出端设置有t型轴;
20.气缸三,被配置为两个,对称设置于所述连接架的内侧;
21.抓手,所述抓手两侧对称安装于所述连接架上。
22.进一步,作为优选,所述定位器包括:
23.摆动电机,固定于所述机身上;
24.主动轮,被配置为与所述摆动电机直径相同的半月形结构,所述主动轮固定连接于摆动电机输出端,且所述主动轮下方同轴固定有推杆;
25.槽轮,其一端与所述连接柱固定相连,另一端与所述主动轮可相对转动连接;
26.限位片,所述限位片固定在所述连接柱下方。
27.进一步,作为优选,所述气缸二包括:
28.伸缩杆,其水平滑动设置于所述气缸二内部,且所述伸缩杆末端设置有活塞;
29.固定柱,被配置为两个,对称固定于所述气缸二右侧内壁;
30.弹簧,被配置为两个,其右侧固定于所述气缸二右侧内壁,且布设于所述固定柱外侧;
31.出气口,其设置于所述气缸二右侧。
32.进一步,作为优选,所述气缸三的输出端设置有滑块,所述滑块可对菌棒竖直方向上的运动进行限位。
33.进一步,作为优选,所述抓手轴接有手爪,所述手爪采用弧形轻钢材质,两侧手爪交叉排列,所述手爪末端设置为凸起结构。
34.进一步,作为优选,所述刮刀机构包括:
35.底座,固定于所述机身上;
36.固定杆,被配置为两个表面有刻度的菱形结构,其同轴套设于所述底座内部;
37.刀架,被配置为两个,且所述刀架可轴向滑动的设置于所述固定杆上;
38.刮刀,其一端与左侧的刀架相铰接,另一端与右侧的刀架相铰接。
39.进一步,作为优选,所述刮刀为钢性材质,被配置为两个,所述刮刀被设置为与水平面成15
°
夹角,其通过刀架上的丝母结构进行固定,所述丝母结构可用于调节刮刀与菌棒两端面的距离。
40.进一步,作为优选,直线式振动筛机架上径向固定有收集箱,且所述收集箱被配置为两个。
41.与现有技术相比,本发明提供了一种机械化食用菌快速采摘装置,具有以下有益效果:
42.优点一:在固定菌棒时,夹持机构能够自由拆卸抓手上的(并更换不同规格)手爪,有利于对不同长度的菌棒进行夹持,气缸上的复进杆可控制夹持机构的升降,使菌棒与刮刀机构相接触,有利于首次采摘时实现刮刀机构的预定位,方便规格相同菌棒的后续采摘。
43.优点二:第一阶段,菌棒利用夹持机构固定时,可通过气缸二的运动,有利于预先抖落菌棒上木屑和破碎的食用菌;第二阶段,可不断改变复进机构气缸气压大小,使菌棒进行上下高频晃动三到五次;第三阶段,固定复进机构气缸内气压,夹持机构上升至最高点,此时开启夹持机构上摆动电机,摆动电机做正反转运动,使得菌棒在可到达的最高位置水平面上进行摆动,第二三阶段的运动效果可在菌棒固定后,对菌棒上木屑和破碎的食用菌进行更高效的除废。
44.优点三:利用刮刀机构采摘后的食用菌可通过滑道落入直线式振动筛,且通过利用振动筛的运动,实现木屑与食用菌的分离,提高采摘效率。
附图说明
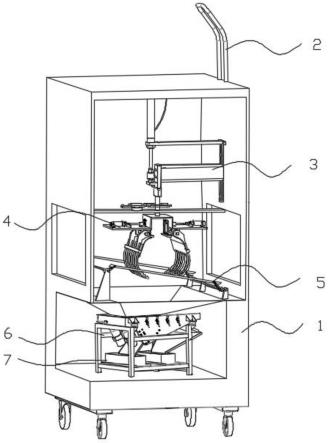
45.图1为一种机械化食用菌快速采摘装置的整体结构示意图;
46.图2为一种机械化食用菌快速采摘装置中复进机构的结构示意图;
47.图3为一种机械化食用菌快速采摘装置中夹持机构的结构示意图;
48.图4为图3中定位器的结构示意图;
49.图5为图3中气缸二的结构示意图;
50.图6为一种机械化食用菌快速采摘装置中刮刀机构的结构示意图;
51.图中:1、机身;2、推手;3、复进机构;31、气缸一;32、复进杆;33、复进架一;4、夹持机构;41、连接柱;42、连接架;43、定位器;431、电机;432、主动轮;433、槽轮;434、限位片;44、气缸二;441、伸缩杆;442、固定柱;443、弹簧;444、出气口;45、气缸三;46、抓手;5、刮刀机构;51、底座;52、固定杆;53、刀座;54、刮刀;6、直线式震动筛;7、收集箱。
具体实施方式
52.请参阅图1~6,本发明实施例中,一种机械化食用菌快速采摘装置,包括:
53.机身1,水平放置于地面上;
54.复进机构3,其固定于所述机身1上;
55.夹持机构4,竖直装配在所述复进机构3下方,用于夹取食用菌棒;
56.刮刀机构5,固定于所述机身1上;
57.直线式振动筛6,其设置于所述夹持机构4正下方,且固定在所述机身1上;
58.且,采摘时,先用所述夹持机构4对食用菌棒进行固定,再利用复进机构3和刮刀机构5的配合进行采摘,使得食用菌沿位于机身1的滑道进入直线式振动筛6,直至筛选出食用菌,且机身1的左右两侧位置均设有传输带,位于一侧的传输带能够将未采摘食用菌定量输送至夹持机构4处,而在刮刀机构5完成采摘工作后,另一侧的传输带将已采摘的菌棒输出至菌棒收集处。
59.本实施例中,如图2,所述复进机构3包括:
60.气缸一31,固定于所述机身1上;
61.复进杆32,其装配在所述气缸一31内部;
62.复进架一33,所述复进架一33固定在所述复进杆32的下方,另一端可竖直滑动设置于所述机身1上,所述复进架一33通过复进杆32的伸缩实现所述夹持机构4的升降。
63.本实施例中,如图3,所述夹持机构4包括:
64.连接柱41,其上端可旋转安装于所述复进架一33下方,且所述连接柱41可竖直滑动设置于所述机身1上;
65.连接架42,其固定于所述连接柱41下方;
66.定位器43,所述定位器43下端固定于所述机身1上,另一端固定于所述连接柱41上;
67.气缸二44,被配置为两个,所述气缸二44固定设置于所述连接架42上,且输出端设
置有t型轴;
68.气缸三45,被配置为两个,对称设置于所述连接架42的内侧;
69.抓手46,所述抓手46两侧对称安装于所述连接架42上,有利于抓手44对菌棒水平方向上进行限位。
70.本实施例中,如图4,所述所述定位器43包括:
71.摆动电机431,固定于所述机身1上;
72.主动轮432,被配置为与所述摆动电机431直径相同的半月形结构,有利于夹持机构4可沿固定轨道下降,所述主动轮432固定连接于摆动电机431输出端,且所述主动轮下方同轴固定有推杆;
73.槽轮433,其一端与所述连接柱41固定相连,另一端与所述主动轮432可相对转动连接,主动轮432可通过所述摆动电机431进行一个90
°
导程的间歇式正反转,同时所述主动轮432上的推杆接触所述槽轮433的槽形结构,驱动所述槽轮433在夹持机构最高位置水平面上来回摆动,有利于抖落菌棒上的木屑与破碎的食用菌;
74.限位片434,所述限位片434固定在所述连接柱41下方,便于复进机构3带动夹持机构4上升至最高位置,从而使得主动轮432与槽轮433进行配合来回转动。
75.本实施例中,如图5,所述气缸二44包括:
76.伸缩杆441,其水平滑动设置于所述气缸二44内部,且所述伸缩杆441末端设置有活塞;
77.固定柱442,被配置为两个,对称固定于所述气缸二44右侧内壁;
78.弹簧443,被配置为两个,其右侧固定于所述气缸二44右侧内壁,且布设于所述固定柱442外侧;
79.出气口444,其设置于所述气缸二44右侧,当所述伸缩杆441伸长时,所述活塞运动至出气口444处,此时气缸二44内气压对伸缩杆441作用力逐渐减小,弹簧443压缩,推动伸缩杆441返程,使得夹持机构4在小范围内可控制开合,有利于所述抓手46在夹取菌棒时可以预先抖落菌棒上的木屑和破碎的食用菌。
80.作为较佳的实施例,所述气缸三45的输出端设置有滑块,所述滑块可对菌棒竖直方向上进行限位,防止菌棒做竖直方向上的运动,有利于采摘工作进行时抓手46夹持菌棒的稳定性。
81.作为较佳的实施例,抓手46轴接有手爪,所述手爪采用弧形轻钢材质,两侧手爪交叉排列,所述手爪末端设置为凸起结构,所述手爪配合所述滑块对菌棒竖直方向进行固定,当菌棒的长短规格不同时,可通过控制拔取手爪的数量来间接控制所需的规格;
82.具体实施时,正常情况下,气缸二44上的复进杆处于伸长状态,抓手46张开,气缸三45上的复进杆处于收缩状态;当采摘时,传输带将菌棒居中放置在抓手46中,通过气缸二44的的收缩,抓手46闭合,对菌棒水平方向上进行固定,同时气缸三45上的复进杆伸长,所述滑块在上方对菌棒进行挤压,下方通过手爪的凸起结构对菌棒防止其滑动,进而在水平和竖直方向上对菌棒进行固定,便于采摘工作的执行。
83.本实施例中,如图6,所述刮刀机构5包括:
84.底座51,固定于所述机身1上;
85.固定杆52,被配置为两个表面有刻度的菱形结构,有利于刮刀54一侧进行定位后,
另一侧可直接根据刻度进行调整位置,所述固定杆52同轴套设于所述底座51内部,且所述固定杆52可配合底座51上的孔进行限位;
86.刀架53,被配置为两个,且所述刀架可轴向滑动的设置于所述固定杆51上;
87.刮刀54,其一端与左侧的刀架53相铰接,另一端与右侧的刀架53相铰接。
88.作为较佳的实施例,所述刮刀54为钢性材质,被配置为两个,所述刮刀54被设置为与水平面成15
°
夹角,首次未采摘的菌棒通过复进机构3下降时,有利于对刮刀54预定位调整,所述刮刀54通过刀架53上的丝母结构进行固定,所述丝母结构可用于调节刮刀54与菌棒两端面的距离。
89.本实施例中,直线式振动筛6机架上径向固定有收集箱7,且所述收集箱7被配置为两个,工作时,利用所述直线式振动筛6上振动电机的激振,使得食用菌在筛网上被抛起,并同时沿着机身方向做直线运动,食用菌从右侧出料口进入右侧收集箱7中,通过筛网产生的木屑或食用菌碎屑从直线式振动筛6下端出料口排出,进入到左侧收集箱7中。
90.在具体实施时,当首次进行采摘,第一阶段:先将菌棒的长短与抓手46进行比对,然后选择合适数量的手爪,夹持机构4居中夹持菌棒,增大气缸二44内气压,使伸缩杆441在手爪夹持菌棒的状态下不断开合,预先抖落菌棒上的木屑与破碎的食用菌等,然后减小气缸二44内气压,使伸缩杆441收缩,从而使夹持机构4夹取菌棒,然后使气缸一31上的复进杆32缓慢伸长,当菌棒下端与刮刀54有一端接触时,气缸一31稳定供气,然后调节并固定刀架53和刮刀54的位置,预定位完成后;第二阶段:不断改变气缸一31内气压大小,使得夹持机构上下高频晃动三到五次,然后降低气压,复进杆32收缩,夹持机构4上升至最高位置,开启电机431进行间歇式的正反转,主动轮432驱动槽轮433相对转动,槽轮带动夹持机构在最高位置水平面上进行晃动,通过第二个阶段的两个晃动减少木屑和碎裂的食用菌对切除带来的影响,完成后关闭摆动电机431,此时主动轮432恢复至初始状态,主动轮432与槽轮433两个圆弧面相接触;第三阶段:增大气缸一31中气压,对菌棒上的食用菌进行切除;第四阶段:后续菌棒规格相同时,将菌棒固定在夹持机构4上,重复第二三阶段工作对食用菌进行采摘,采摘下来的食用菌沿着机身1上的滑道进入到直线式振动筛6,在振动电机的激振作用下,食用菌进入机身方向上的出料口进入到右侧收集箱7中,而通过筛网产生的木屑以及食用菌碎屑沿着直线式振动筛6的下端出料口进入到左侧收集箱7中。
91.以上所述的,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1