一种多组互联树用施肥机
1.本发明属于施肥机技术领域,特别涉及一种多组互联树用施肥机。
背景技术:
2.现阶段树木施肥方式一般采用为辐射状施肥、环状施肥、条沟状施肥以及全园撒施,其中前三种施肥方式最为普遍、科学,适用于小中大树苗的施肥。全园撒施操作简单,但施肥不够精准,而辐射状施肥、环状施肥以及条沟状施肥均需要挖窝,人工挖窝不仅费时费力,而且挖窝深度不一致,施肥效果不理想。普通的钻孔施肥机仅适用小树苗,单穴施肥,功能单一,不能适用大树的规范施肥;而现有的开沟施肥一体类施肥机械,开沟单一,需多次围绕树进行开沟,多次围绕树进行开沟后,开沟形状不确定、不规范,影响施肥效果与下次施肥作业位置。
技术实现要素:
3.本发明的目的是克服现有技术中的不足,提供一种多组互联树用施肥机,以解决现有的树用施肥机开沟单一,需多次围绕树进行开沟,多次围绕树进行开沟后,开沟形状不确定、不规范,影响施肥效果与下次施肥作业位置的问题。
4.为了实现上述目的,本发明采用的技术方案是:
5.一种多组互联树用施肥机,包括肥料箱、作业箱、挖窝施肥组件及蓄电池,其中蓄电池在若干施肥机工作中仅一个施肥机携带,或每个施肥机均携带一个蓄电池;所述肥料箱上部设有加料口,肥料箱下部连接有若干送料软管,肥料箱通过若干支柱固定地安装在作业箱上部;所述作业箱下部设有支腿,支腿下部设有滚轮;所述挖窝施肥组件包括电机架,电机架内部安装有驱动电机,电机架两侧设有凸耳一,凸耳一上滑动连接有导柱,导柱的两端与作业箱固定连接,驱动电机的输出轴上连接有主动锥齿轮,所述电机架前端设有凸耳二,凸耳二上转动连接有转轴,转轴上设有与主动锥齿轮相啮合的从动锥齿轮,所述转轴上还设有若干齿轮箱,齿轮箱上部固定连接有连杆,连杆外部滑动地套设有套筒,套筒的上端与作业箱上壁固定连接;所述齿轮箱内设有主动齿轮和从动齿轮,主动齿轮与转轴固定连接,从动齿轮安装在短接轴的一端,短接轴的另一端设有过渡齿轮;所述作业箱内贯通地连接有若干钻杆,钻杆的下端连接有挖窝钻头,所述钻杆和挖窝钻头均为空心结构,且挖窝钻头的下端设有漏料孔,钻杆上固定连接有端面齿轮,端面齿轮与过渡齿轮啮合,所述钻杆上端设有套管,套管上端与送料软管连接,套管下端通过轴承与钻杆活动连接,相邻的套管之间通过承重杆连接;所述作业箱内部设有若干固定块,固定块的两端与作业箱内壁固定连接,固定块上设有容纳转轴上下滑动的滑槽,固定块的一端设有齿条,齿条与过渡齿轮啮合。
6.作为本技术方案的进一步优选,所述肥料箱下部设有若干下料漏斗,便于肥料从肥料箱中漏下;所述套管内部设有漏斗形的隔片,隔片设置于轴承的上部,既避免了肥料阻滞轴承的转动,又便于肥料的落下。
7.作为本技术方案的进一步优选,所述挖窝钻头外部设有螺旋叶片,挖窝钻头正向旋转时螺旋叶片便于挖窝钻头挖窝,挖窝钻头反向旋转时,螺旋叶片将其上部的土壤卸下,实现了挖窝施肥的同步覆土。
8.作为本技术方案的进一步优选,所述作业箱内部设有旋转柱,旋转柱转动地安装在作业箱内部,旋转柱的一半圆弧面上设有旋转凹槽,所述旋转柱上部滑动地连接有开关压杆,开关压杆的下端伸入旋转凹槽内部,开关压杆的上端伸出作业箱,开关压杆上设有触片一,旋转柱上设有触片二;所述旋转凹槽的左右两侧为竖直结构,旋转凹槽的下部设有施肥深度板,旋转凹槽的上端和施肥深度板的上端为平行的螺旋形结构;所述旋转柱下端连接有拨动柱,作业箱底部设有开关板,所述开关板为弧形板状结构,开关板的两端均设有凸起,开关板的中部与作业箱铰接,使得开关板呈翘板结构,且开关板的一侧设有正转触片,开关板的另一侧设有反转触片,拨动柱的下端与开关板的凸起相抵后,开关板与正转触片或反转触片接触;其中一个套管一侧固定连接有升降指针,升降指针由导电材料制成,升降指针的末端设置于旋转凹槽内;旋转凹槽的a处设有弧形的指针扣板,指针扣板与旋转凹槽的侧壁间设有容纳升降指针从上向下穿过的间隙;开关板与正转触片和反转触片构成正反转开关,并与蓄电池、触片一、触片二、驱动电机串联。挖窝时,向下按压开关压杆,使触片一与触片二导通,初始状态时,钻杆处于上部,此时升降指针处于a点,旋转柱下端的拨动柱按压开关板与正转触片接触,驱动电机正转带动转轴正转,转轴通过齿轮传动带动过渡齿轮转动,过渡齿轮带动端面齿轮转动从而带动钻杆正转,与此同时,过渡齿轮转动时沿齿条向下移动,带动钻杆向下移动进行挖窝,套管向下移动带动升降指针向b点移动,由于a-b为竖直结构,升降指针在a-b之间移动时,旋转柱不旋转;当升降指针到达b点与施肥深度板接触并继续向下移动至c点时,升降指针在施肥深度板上部螺旋形结构的干涉下推动旋转柱旋转,旋转柱下部的拨动柱随旋转柱转动180
°
,将开关板的另一端下压,使开关板的另一端与反转触片导通,驱动电机开始反转,并带动钻杆向上移动,此时升降指针由c点向上移动至d点,升降指针到达d点后再次拨动旋转柱反向旋转180
°
再次回到a点,升降指针回到a点后向上推动开关压板使触片一与触片二分离,电机停止转动,完成一个施肥周期的运行。
9.作为本技术方案的进一步优选,所述正转触片和反转触片中部均设有磁铁,保证了开关板与正转触片或反转触片接触的稳定性。
10.作为本技术方案的进一步优选,所述施肥深度板的c点处设有施肥导片,所述送料软管上端设有电磁阀,施肥导片与电磁阀串联并与蓄电池、触片一、触片二、驱动电机以及正反转开关构成的串联电路并联;当升降指针与施肥导片接触后,此时升降指针位于施肥深度板的最低点,反应到挖窝施肥组件中,此时挖窝钻头位于挖窝的最深处,电磁阀通电打开,肥料从肥料箱中落下,升降指针向上运动与施肥导片脱离后,电磁阀断电关闭,肥料不再落下,实现了精确施肥。
11.作为本技术方案的进一步优选,所述施肥深度板与旋转柱为分体式结构,所述施肥深度板下部设有环槽,环槽内部滑动地连接有挡片,挡片一侧设有拉杆一;所述旋转柱中部设有通槽一,拉杆一滑动地设置于通槽一内部,且拉杆一的末端延伸至作业箱的外部并螺纹连接有紧固螺母一;上下调整拉杆一的位置实现了施肥深度板高度的调节,从而实现了挖窝深度的调节。
12.作为本技术方案的进一步优选,所述施肥导片与施肥深度板可伸缩地连接,所述
施肥导片一侧设有拉杆二,旋转柱一侧设有通槽二,拉杆二滑动地设置于通槽二内部,且拉杆二的末端延伸至作业箱的外部并螺纹连接有紧固螺母二;上下调整拉杆二的位置实现了升降指针与施肥导片接触时间的调整,从而实现了施肥量的调整。
13.作为本技术方案的进一步优选,所述作业箱一侧设有施肥深度刻度尺和施肥量刻度尺,所述拉杆一上固定连接有指针一,指针一指向施肥深度刻度尺,拉杆二上固定连接有指针二,指针二指向施肥量刻度尺,便于直观地判断施肥深度和施肥量。
14.作为本技术方案的进一步优选,所述施肥深度刻度尺和施肥量刻度尺均包括主动轮和从动轮,主动轮和从动轮与作业箱转动连接,且主动轮和从动轮通过皮带连接,皮带上设有刻度线,所述主动轮一侧同轴连接有调节手轮,转动调节手轮便于调整施肥深度刻度尺和施肥量刻度尺的零点位置,以便于施肥深度和施肥量的校准。
15.本发明的有益效果是:
16.1)本发明通过驱动电机的正反转带动挖窝钻头上下运动,实现了针对树木的挖窝施肥,且多组施肥机组合使用解决了现有的树用施肥机开沟单一,需多次围绕树进行开沟,多次围绕树进行开沟后,开沟形状不确定、不规范,影响施肥效果与下次施肥作业位置的问题。
17.2)肥料箱下部设有若干下料漏斗,便于肥料从肥料箱中漏下;套管内部设有漏斗形的隔片,隔片设置于轴承的上部,既避免了肥料阻滞轴承的转动,又便于肥料的落下。
18.3)挖窝钻头外部设有螺旋叶片,挖窝钻头正向旋转时螺旋叶片便于挖窝钻头挖窝,挖窝钻头反向旋转时,螺旋叶片将其上部的土壤卸下,实现了挖窝施肥的同步覆土。
19.4)作业箱内部设有旋转柱,利用升降指针与旋转组的旋转凹槽组合运动,实现了电机的自动转向。
20.5)正转触片和反转触片中部均设有磁铁,保证了开关板与正转触片或反转触片接触的稳定性。
21.6)施肥深度板的c点处设有施肥导片,送料软管上端设有电磁阀,当升降指针与施肥导片接触后,此时升降指针位于施肥深度板的最低点,反应到挖窝施肥组件中,此时挖窝钻头位于挖窝的最深处,电磁阀通电打开,肥料从肥料箱中落下,升降指针向上运动与施肥导片脱离后,电磁阀断电关闭,肥料不再落下,实现了精确施肥。
22.7)施肥深度板与旋转柱为分体式结构,施肥深度板下部设有环槽,环槽内部滑动地连接有挡片,挡片一侧设有拉杆一;旋转柱中部设有通槽一,拉杆一滑动地设置于通槽一内部,且拉杆一的末端延伸至作业箱的外部并螺纹连接有紧固螺母一;上下调整拉杆一的位置实现了施肥深度板高度的调节,从而实现了挖窝深度的调节。
23.8)施肥导片与施肥深度板可伸缩地连接,施肥导片一侧设有拉杆二,旋转柱一侧设有通槽二,拉杆二滑动地设置于通槽二内部,且拉杆二的末端延伸至作业箱的外部并螺纹连接有紧固螺母二;上下调整拉杆二的位置实现了升降指针与施肥导片接触时间的调整,从而实现了施肥量的调整。
24.9)作业箱一侧设有施肥深度刻度尺和施肥量刻度尺,拉杆一上固定连接有指针一,指针一指向施肥深度刻度尺,拉杆二上固定连接有指针二,指针二指向施肥量刻度尺,便于直观地判断施肥深度和施肥量。
25.10)施肥深度刻度尺和施肥量刻度尺均包括主动轮和从动轮,主动轮和从动轮与
作业箱转动连接,且主动轮和从动轮通过皮带连接,皮带上设有刻度线,主动轮一侧同轴连接有调节手轮,转动调节手轮便于调整施肥深度刻度尺和施肥量刻度尺的零点位置,以便于施肥深度和施肥量的校准。
附图说明
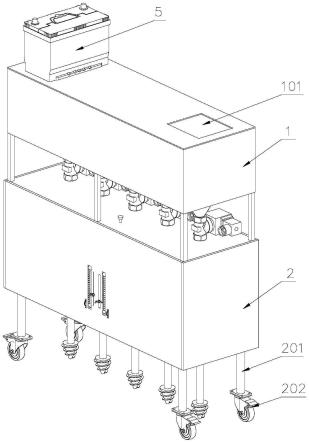
26.附图1是本发明一种多组互联树用施肥机结构示意图。
27.附图2是本发明一种多组互联树用施肥机中肥料箱结构示意图。
28.附图3是本发明一种多组互联树用施肥机中作业箱结构示意图。
29.附图4是本发明一种多组互联树用施肥机中作业箱内部结构示意图。
30.附图5是本发明一种多组互联树用施肥机中挖窝施肥组件结构示意图。
31.附图6是本发明一种多组互联树用施肥机中驱动电机连接示意图。
32.附图7是本发明一种多组互联树用施肥机中钻杆连接示意图。
33.附图8是本发明一种多组互联树用施肥机中固定块结构示意图。
34.附图9是本发明一种多组互联树用施肥机中旋转柱一侧结构示意图。
35.附图10是本发明一种多组互联树用施肥机中旋转柱另一侧结构示意图。
36.附图11是本发明一种多组互联树用施肥机图10中a处局部放大图。
37.附图12是本发明一种多组互联树用施肥机中旋转柱爆炸图。
38.附图13是本发明一种多组互联树用施肥机中施肥深度刻度尺结构示意图。
39.附图14是本发明一种多组互联树用施肥机电路连接示意图。
40.附图15是本发明一种多组互联树用施肥机实施例1使用状态图。
41.附图16是本发明一种多组互联树用施肥机实施例2使用状态图。
42.附图17是本发明一种多组互联树用施肥机实施例3使用状态图。
43.图中:1、肥料箱;101、加料口;102、下料漏斗;103、电磁阀;104、送料软管;105、支柱;2、作业箱;201、支腿;202、滚轮;203、施肥深度刻度尺;2031、主动轮;2032、从动轮;2033、调节手轮;204、施肥量刻度尺;3、挖窝施肥组件;301、电机架;302、驱动电机;303、转轴;304、凸耳一;305、导柱;306、凸耳二;307、主动锥齿轮;308、从动锥齿轮;309、齿轮箱;310、主动齿轮;311、从动齿轮;312、过渡齿轮;313、端面齿轮;314、齿条;315、固定块;316、滑槽;317、钻杆;318、挖窝钻头;319、连杆;320、套筒;321、轴承;322、套管;323、隔片;324、承重杆;325、升降指针;326、螺旋叶片;4、旋转柱;401、旋转凹槽;402、施肥深度板;403、通槽一;404、环槽;405、挡片;406、拉杆一;407、指针一;408、紧固螺母一;409、施肥导片;410、通槽二;411、拉杆二;412、指针二;413、紧固螺母二;414、拨动柱;415、开关板;416、正转触片;417、反转触片;418、开关压杆;419、指针扣板;420、触片一;421、触片二;422、磁铁;5、蓄电池。
具体实施方式
44.下面结合附图1-17,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
45.在本发明的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明,而不是指示或暗示所指的装置或元件必须具有特定的方位、特定的方位构造和操作,因此不能理解为对本发明的限制。
46.实施例1
47.如图15所示,多组互联树用施肥机绕树木周围呈放射状布置,以实现树木的放射状施肥,如图1-8所示,其中一组施肥机包括肥料箱1、作业箱2、挖窝施肥组件3及蓄电池5,其中蓄电池5在若干施肥机工作中仅一个施肥机携带,或每个施肥机均携带一个蓄电池5;所述肥料箱1上部设有加料口101,肥料箱1下部连接有若干送料软管104,肥料箱1通过若干支柱105固定地安装在作业箱2上部;所述作业箱2下部设有支腿201,支腿201下部设有滚轮202;所述挖窝施肥组件3包括电机架301,电机架301内部安装有驱动电机302,电机架301两侧设有凸耳一304,凸耳一304上滑动连接有导柱305,导柱305的两端与作业箱2固定连接,驱动电机302的输出轴上连接有主动锥齿轮307,所述电机架301前端设有凸耳二306,凸耳二306上转动连接有转轴303,转轴303上设有与主动锥齿轮307相啮合的从动锥齿轮308,所述转轴303上还设有若干齿轮箱309,齿轮箱309上部固定连接有连杆319,连杆319外部滑动地套设有套筒320,套筒320的上端与作业箱2上壁固定连接;所述齿轮箱309内设有主动齿轮310和从动齿轮311,主动齿轮310与转轴303固定连接,从动齿轮311安装在短接轴的一端,短接轴的另一端设有过渡齿轮312;所述作业箱2内贯通地连接有若干钻杆317,钻杆317的下端连接有挖窝钻头318,所述钻杆317和挖窝钻头318均为空心结构,且挖窝钻头318的下端设有漏料孔,钻杆317上固定连接有端面齿轮313,端面齿轮313与过渡齿轮312啮合,所述钻杆317上端设有套管322,套管322上端与送料软管104连接,套管322下端通过轴承321与钻杆317活动连接,相邻的套管322之间通过承重杆324连接;所述作业箱2内部设有若干固定块315,固定块315的两端与作业箱2内壁固定连接,固定块315上设有容纳转轴303上下滑动的滑槽316,固定块315的一端设有齿条314,齿条314与过渡齿轮312啮合。
48.在本实施例中,如图2所示,所述肥料箱1下部设有若干下料漏斗102,便于肥料从肥料箱1中漏下;如图7所示,所述套管322内部设有漏斗形的隔片323,隔片323设置于轴承321的上部,既避免了肥料阻滞轴承321的转动,又便于肥料的落下。
49.在本实施例中,如图7所示,所述挖窝钻头318外部设有螺旋叶片326,挖窝钻头318正向旋转时螺旋叶片326便于挖窝钻头318挖窝,挖窝钻头318反向旋转时,螺旋叶片326将其上部的土壤卸下,实现了挖窝施肥的同步覆土。
50.在本实施例中,如图4、图9-11、图14所示,所述作业箱2内部设有旋转柱4,旋转柱4转动地安装在作业箱2内部,旋转柱4的一半圆弧面上设有旋转凹槽401,所述旋转柱4上部滑动地连接有开关压杆418,开关压杆418的下端伸入旋转凹槽401内部,开关压杆418的上端伸出作业箱2,开关压杆418上设有触片一420,旋转柱4上设有触片二421;所述旋转凹槽401的左右两侧为竖直结构,旋转凹槽401的下部设有施肥深度板402,旋转凹槽401的上端和施肥深度板402的上端为平行的螺旋形结构;所述旋转柱4下端连接有拨动柱414,作业箱2底部设有开关板415,所述开关板415为弧形板状结构,开关板415的两端均设有凸起,开关板415的中部与作业箱2铰接,使得开关板415呈翘板结构,且开关板415的一侧设有正转触片416,开关板415的另一侧设有反转触片417,拨动柱414的下端与开关板415的凸起相抵
后,开关板415与正转触片416或反转触片417接触;其中一个套管322一侧固定连接有升降指针325,升降指针325由导电材料制成,升降指针325的末端设置于旋转凹槽401内;旋转凹槽401的a处设有弧形的指针扣板419,指针扣板419与旋转凹槽401的侧壁间设有容纳升降指针325从上向下穿过的间隙;开关板415与正转触片416和反转触片417构成正反转开关,并与蓄电池5、触片一420、触片二421、驱动电机302串联。挖窝时,向下按压开关压杆418,使触片一420与触片二421导通,初始状态时,钻杆317处于上部,此时升降指针325处于a点,旋转柱4下端的拨动柱414按压开关板415与正转触片416接触,驱动电机302正转带动转轴303正转,转轴303通过齿轮传动带动过渡齿轮312转动,过渡齿轮312带动端面齿轮313转动从而带动钻杆317正转,与此同时,过渡齿轮312转动时沿齿条314向下移动,带动钻杆317向下移动进行挖窝,套管322向下移动带动升降指针325向b点移动,由于a-b为竖直结构,升降指针325在a-b之间移动时,旋转柱4不旋转;当升降指针325到达b点与施肥深度板402接触并继续向下移动至c点时,升降指针325在施肥深度板402上部螺旋形结构的干涉下推动旋转柱4旋转,旋转柱4下部的拨动柱414随旋转柱4转动180
°
,将开关板415的另一端下压,使开关板415的另一端与反转触片417导通,驱动电机302开始反转,并带动钻杆317向上移动,此时升降指针325由c点向上移动至d点,升降指针325到达d点后再次拨动旋转柱4反向旋转180
°
再次回到a点,升降指针325回到a点后向上推动开关压板使触片一420与触片二421分离,电机停止转动,完成一个施肥周期的运行。
51.在本实施例中,如图9所示,所述正转触片416和反转触片417中部均设有磁铁422,保证了开关板415与正转触片416或反转触片417接触的稳定性。
52.在本实施例中,如图2、图9所示,所述施肥深度板402的c点处设有施肥导片409,所述送料软管104上端设有电磁阀103,施肥导片409与电磁阀103串联并与蓄电池5、触片一420、触片二421、驱动电机302以及正反转开关构成的串联电路并联;当升降指针325与施肥导片409接触后,此时升降指针325位于施肥深度板402的最低点,反应到挖窝施肥组件3中,此时挖窝钻头318位于挖窝的最深处,电磁阀103通电打开,肥料从肥料箱1中落下,升降指针325向上运动与施肥导片409脱离后,电磁阀103断电关闭,肥料不再落下,实现了精确施肥。
53.在本实施例中,如图9、图12所示,所述施肥深度板402与旋转柱4为分体式结构,所述施肥深度板402下部设有环槽404,环槽404内部滑动地连接有挡片405,挡片405一侧设有拉杆一406;所述旋转柱4中部设有通槽一403,拉杆一406滑动地设置于通槽一403内部,且拉杆一406的末端延伸至作业箱2的外部并螺纹连接有紧固螺母一408;上下调整拉杆一406的位置实现了施肥深度板402高度的调节,从而实现了挖窝深度的调节。
54.在本实施例中,如图9、图12所示,所述施肥导片409与施肥深度板402可伸缩地连接,所述施肥导片409一侧设有拉杆二411,旋转柱4一侧设有通槽二410,拉杆二411滑动地设置于通槽二410内部,且拉杆二411的末端延伸至作业箱2的外部并螺纹连接有紧固螺母二413;上下调整拉杆二411的位置实现了升降指针325与施肥导片409接触时间的调整,从而实现了施肥量的调整。
55.在本实施例中,如图3所示,所述作业箱2一侧设有施肥深度刻度尺203和施肥量刻度尺204,所述拉杆一406上固定连接有指针一407,指针一407指向施肥深度刻度尺203,拉杆二411上固定连接有指针二412,指针二412指向施肥量刻度尺204,便于直观地判断施肥
深度和施肥量。
56.在本实施例中,如图13所示,所述施肥深度刻度尺203和施肥量刻度尺204均包括主动轮2031和从动轮2032,主动轮2031和从动轮2032与作业箱2转动连接,且主动轮2031和从动轮2032通过皮带连接,皮带上设有刻度线,所述主动轮2031一侧同轴连接有调节手轮2033,转动调节手轮2033便于调整施肥深度刻度尺203和施肥量刻度尺204的零点位置,以便于施肥深度和施肥量的校准。
57.实施例2
58.如图16所示,与实施例1所不同的是,多组互联树用施肥机绕树木周围呈环状布置,以实现树木的环状施肥。
59.实施例3
60.如图17所示,与实施例1所不同的是,多组互联树用施肥机与树木间隔布置,以实现树木的条沟状施肥。
61.以上内容仅仅是对本发明的结构所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1