自走割草机及自走割草机的自走控制方法与流程
本发明涉及一种自走割草机及自走割草机的自走控制方法,属于园林工具。
背景技术:
1、目前,市面上使用的小型割草机,大部分都是通过单电机加齿轮箱和连杆机构来实现双轮驱动的。这样的设计,虽然能够实现小型割草机的自走,但是存在离心结构带来的后拉困难问题,使得小型割草机的自走效果不理想。
2、有鉴于此,确有必要对现有的割草机的自走控制进行改进,以解决上述问题。
技术实现思路
1、本发明的目的在于提供一种自走割草机及自走割草机的自走控制方法,以解决现有技术中离心结构带来的后拉困难的问题。
2、为实现上述目的,本发明提供了一种自走割草机,包括:
3、机体;
4、行走轮组件,设置在所述机体的下方,用于承载所述机体并带动所述机体在地面行走,所述行走轮组件包括第一行走轮、第二行走轮、第一轮毂电机以及第二轮毂电机,所述第一轮毂电机与所述第一行走轮相连,用于控制所述第一行走轮的转速,所述第二轮毂电机与所述第二行走轮相连,用于控制所述第二行走轮的转速;以及
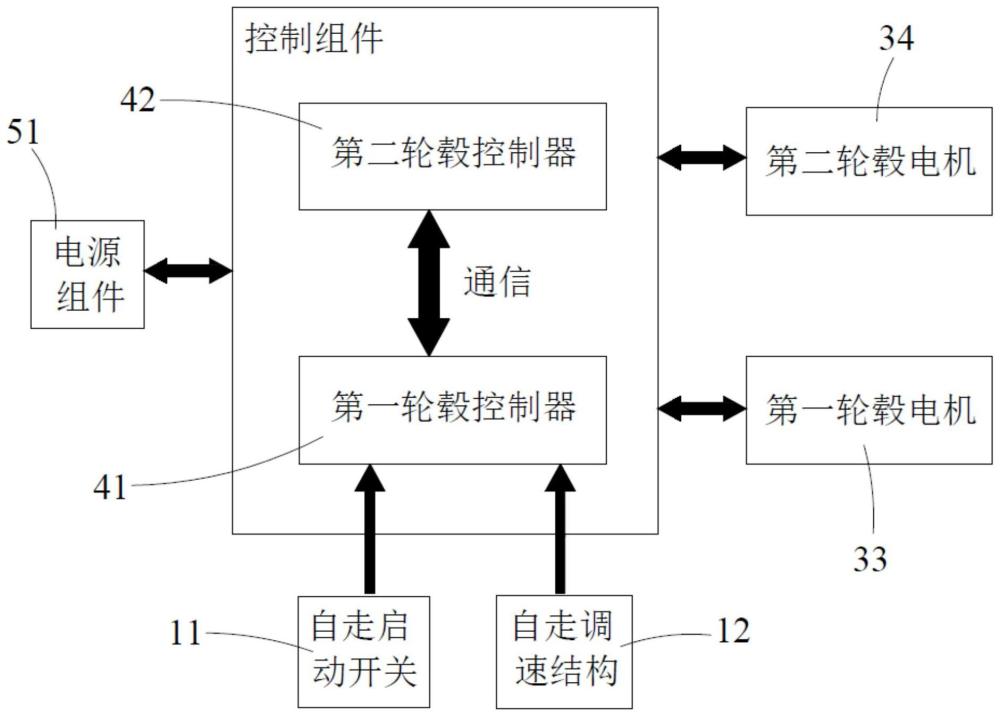
5、控制组件,包括第一轮毂控制器和第二轮毂控制器,所述第一轮毂控制器与所述第二轮毂控制器相互通信连接,且所述第一轮毂控制器配置为发送控制指令至所述第一轮毂电机和所述第二轮毂控制器,使所述第一轮毂电机控制所述第一行走轮按照控制指令中的速度设定值行走;所述第二轮毂控制器配置为接收所述第一轮毂控制器发出的控制指令并传送至所述第二轮毂电机,使所述第二轮毂电机控制所述第二行走轮也按照控制指令中的速度设定值行走。
6、作为本发明的进一步改进,所述第二轮毂控制器还配置为接收所述第二轮毂电机采集的第二行走轮的实时行走速度,并传送至所述第一轮毂控制器。
7、作为本发明的进一步改进,所述第一轮毂控制器还配置为接收所述第一轮毂电机采集的第一行走轮的实时行走速度,并将第一行走轮的实时行走速度与第二行走轮的实时行走速度进行比较,以实时调整第一行走轮和第二行走轮的行走速度,使第一行走轮的行走速度与第二行走轮的行走速度相同,所述自走割草机保持直线行走。
8、作为本发明的进一步改进,当所述第一行走轮的实时行走速度与第二行走轮的实时行走速度之间存在速度差且该速度差大于预设转速差阈值时,行走速度较高的轮毂控制器控制相应的轮毂电机降低转速,行走速度较低的轮毂控制器则控制相应的轮毂电机按照速度设定值运行。
9、作为本发明的进一步改进,所述预设转速差阈值为5rpm。
10、作为本发明的进一步改进,所述第一行走轮为主动轮,所述第二行走轮为从动轮;所述第一轮毂电机为主轮毂电机,所述第二轮毂电机为从轮毂电机;所述第一轮毂控制器为主轮毂控制mcu,所述第二轮毂控制器为从轮毂控制mcu。
11、作为本发明的进一步改进,所述自走割草机还包括电源组件,所述电源组件与所述控制组件电连接,用于为所述第一轮毂控制器和所述第二轮毂控制器供电。
12、作为本发明的进一步改进,所述自走割草机还包括自走启动开关和自走调速结构,所述自走启动开关和所述自走调速结构均与所述第一轮毂控制器电性连接,以在所述自走启动开关启动后,由所述自走调速结构发送调速信号至所述第一轮毂控制器。
13、为实现上述目的,本发明还提供了一种自走割草机的自走控制方法,主要包括以下步骤:
14、自走割草机上电启动后,第一轮毂控制器发送控制指令给第一轮毂电机和第二轮毂控制器,由第一轮毂电机控制第一行走轮按照控制指令中的速度设定值行走;
15、第二轮毂控制器接收到控制指令后,将控制指令传送给第二轮毂电机,由第二轮毂电机控制第二行走轮也按照控制指令中的速度设定值行走;
16、第一轮毂控制器接收第一轮毂电机采集的第一行走轮的实时行走速度,第二轮毂控制器接收第二轮毂电机采集的第二行走轮的实时行走速度,并传送至第一轮毂控制器;
17、第一轮毂控制器将第一行走轮的实时行走速度与第二行走轮的实时行走速度进行比较,并实时调整第一行走轮和第二行走轮的行走速度,使第一行走轮的行走速度与第二行走轮的行走速度相同,自走割草机保持直线行走。
18、作为本发明的进一步改进,所述第一轮毂电机控制第一行走轮按照控制指令中的速度设定值行走时,若第一行走轮的行走速度未达到速度设定值,则增大第一轮毂控制器输出的pwm占空比;若第一行走轮的行走速度达到了速度设定值,则保持当前占空比运行。
19、作为本发明的进一步改进,所述第二轮毂电机控制第二行走轮按照控制指令中的速度设定值行走时,若第二行走轮的行走速度未达到速度设定值,则增大第二轮毂控制器输出的pwm占空比;若第二行走轮的行走速度达到了速度设定值,则保持当前占空比运行。
20、作为本发明的进一步改进,当所述第一行走轮的实时行走速度与第二行走轮的实时行走速度之间存在速度差且该速度差大于预设转速差阈值时,行走速度较高的轮毂控制器控制相应的轮毂电机降低转速,行走速度较低的轮毂控制器则控制相应的轮毂电机按照速度设定值运行。
21、作为本发明的进一步改进,所述自走割草机还包括与第一轮毂控制器电性连接的自走启动开关和自走调速结构,当自走割草机上电后,所述自走启动开关闭合,所述自走调速结构发出调速信号至所述第一轮毂控制器,由所述第一轮毂控制器计算出对应的速度设定值。
22、本发明的有益效果是:本发明的自走割草机通过设置第一轮毂控制器和第二轮毂控制器,从而可以利用第一轮毂控制器来控制第一轮毂电机工作,使第一行走轮按照速度设定值行走,同时利用第二轮毂控制器来控制第二轮毂电机工作,使第二行走轮也按照速度设定值行走,实现了双轮毂控制器的分别驱动;此外,通过将第一轮毂控制器设置成与第二轮毂控制器通信连接,从而可以在第一轮毂控制器和第二轮毂控制器之间进行数据传输,使第一行走轮和第二行走轮的行走速度保持一致,进而保证自走割草机始终能够沿直线行走。
技术特征:
1.一种自走割草机,其特征在于,包括:
2.根据权利要求1所述的自走割草机,其特征在于:所述第二轮毂控制器还配置为接收所述第二轮毂电机采集的第二行走轮的实时行走速度,并传送至所述第一轮毂控制器。
3.根据权利要求2所述的自走割草机,其特征在于:所述第一轮毂控制器还配置为接收所述第一轮毂电机采集的第一行走轮的实时行走速度,并将第一行走轮的实时行走速度与第二行走轮的实时行走速度进行比较,以实时调整第一行走轮和第二行走轮的行走速度,使第一行走轮的行走速度与第二行走轮的行走速度相同,所述自走割草机保持直线行走。
4.根据权利要求3所述的自走割草机,其特征在于:当所述第一行走轮的实时行走速度与第二行走轮的实时行走速度之间存在速度差且该速度差大于预设转速差阈值时,行走速度较高的轮毂控制器控制相应的轮毂电机降低转速,行走速度较低的轮毂控制器则控制相应的轮毂电机按照速度设定值运行。
5.根据权利要求4所述的自走割草机,其特征在于:所述预设转速差阈值为5rpm。
6.根据权利要求1所述的自走割草机,其特征在于:所述第一行走轮为主动轮,所述第二行走轮为从动轮;所述第一轮毂电机为主轮毂电机,所述第二轮毂电机为从轮毂电机;所述第一轮毂控制器为主轮毂控制mcu,所述第二轮毂控制器为从轮毂控制mcu。
7.根据权利要求1所述的自走割草机,其特征在于:所述自走割草机还包括电源组件,所述电源组件与所述控制组件电连接,用于为所述第一轮毂控制器和所述第二轮毂控制器供电。
8.根据权利要求1所述的自走割草机,其特征在于:所述自走割草机还包括自走启动开关和自走调速结构,所述自走启动开关和所述自走调速结构均与所述第一轮毂控制器电性连接,以在所述自走启动开关启动后,由所述自走调速结构发送调速信号至所述第一轮毂控制器。
9.一种自走割草机的自走控制方法,其特征在于,主要包括以下步骤:
10.根据权利要求9所述的自走控制方法,其特征在于:所述第一轮毂电机控制第一行走轮按照控制指令中的速度设定值行走时,若第一行走轮的行走速度未达到速度设定值,则增大第一轮毂控制器输出的pwm占空比;若第一行走轮的行走速度达到了速度设定值,则保持当前占空比运行。
11.根据权利要求9所述的自走控制方法,其特征在于:所述第二轮毂电机控制第二行走轮按照控制指令中的速度设定值行走时,若第二行走轮的行走速度未达到速度设定值,则增大第二轮毂控制器输出的pwm占空比;若第二行走轮的行走速度达到了速度设定值,则保持当前占空比运行。
12.根据权利要求9所述的自走控制方法,其特征在于:当所述第一行走轮的实时行走速度与第二行走轮的实时行走速度之间存在速度差且该速度差大于预设转速差阈值时,行走速度较高的轮毂控制器控制相应的轮毂电机降低转速,行走速度较低的轮毂控制器则控制相应的轮毂电机按照速度设定值运行。
13.根据权利要求9所述的自走控制方法,其特征在于:所述自走割草机还包括与第一轮毂控制器电性连接的自走启动开关和自走调速结构,当自走割草机上电后,所述自走启动开关闭合,所述自走调速结构发出调速信号至所述第一轮毂控制器,由所述第一轮毂控制器计算出对应的速度设定值。
技术总结
本发明提供了一种自走割草机及自走割草机的自走控制方法,所述自走割草机包括机体、行走轮组件及控制组件,行走轮组件包括第一行走轮、第二行走轮、第一轮毂电机以及第二轮毂电机,第一轮毂电机用于控制第一行走轮的转速,第二轮毂电机用于控制第二行走轮的转速;控制组件包括第一轮毂控制器和第二轮毂控制器,第一轮毂控制器配置为发送控制指令至第一轮毂电机和第二轮毂控制器,使第一轮毂电机控制第一行走轮按照控制指令中的速度设定值行走;第二轮毂控制器配置为接收第一轮毂控制器发出的控制指令并传送至第二轮毂电机,使第二轮毂电机控制第二行走轮也按照控制指令中的速度设定值行走,进而使自走割草机能够沿直线行走。
技术研发人员:陶文
受保护的技术使用者:格力博(江苏)股份有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!